
提要
高博的工作是对基本 ORB SLAM2 的扩展,基本思想是为每个关键帧构造相应的点云,然后依据从 ORB SLAM2 中获取的关键帧位置信息将所有的点云拼接起来,形成一个全局点云地图。
https://github.com/gaoxiang12/ORBSLAM2_with_pointcloud_map
具体的依赖包括:
OpenCV (推荐 3.2 版本)
DBoW2 和 g2o(源文件已经包含在了 github repo 中,随后一起编译即可,这里先不管)
ROS (推荐 melodic)
Eigen3(推荐 3.2 版本)
Pangolin
PCL:由于添加了点云相关的操作,需要安装 PCL 库文件
sudo apt install libpcl-dev
从高博的 github repo 下载源文件
git clone https://github.com/gaoxiang12/ORBSLAM2_with_pointcloud_map.git
下载的文件内容
我们只需要其中的子文件夹
ORB_SLAM2_modified
,为了方便后续操作,可以将子文件夹
ORB_SLAM2_modified
单独拿出来,放到用户
home(~)
路径下。
然后把原本 ORB SLAM2 中的 Vocabulary 文件夹和它里面的 ORBvoc.txt.tar.gz 文件拷贝过来,放到 ORB_SLAM2_modified 路径下。
cp -r Vocabulary/~/ORB_SLAM2_modified/
编译
开始进行编译
首先把
~/ORB_SLAM2_modified/cmake-build-debug, ~/ORB_SLAM2_modified/Thirdparty/DBoW2/build , ~/ORB_SLAM2_modified/Thirdparty/g2o/build
这三个 build 文件夹删掉,
然后运行 ORB_SLAM2_modified 中的 build.sh,进行编译
./build.sh
编译完成
测试
完成后进行测试
普通模式
我们测试可以使用完成数据集
可以将上一轮步骤下载的
rgbd_dataset_freiburg1_xyz
文件复制粘贴到
/home/heying/ORB_SLAM2_modified/Examples/datasets
中
在使用数据之前,需要对
rgbd_dataset_freiburg1_xyz
中的 RGB 文件和 Depth 文件进行匹配。TUM 数据官网 提供了匹配的程序
associate.py
,这个也是上一轮下载的py文件
https://svncvpr.in.tum.de/cvpr-ros-pkg/trunk/rgbd_benchmark/rgbd_benchmark_tools/src/rgbd_benchmark_tools/associate.py
将python文件保存,然后运行
python associate.py rgb.txt depth.txt > association.txt
运行,要注意调用的文件的路径
./bin/rgbd_tum Vocabulary/ORBvoc.bin Examples/RGB-D/TUM1.yaml Examples/datasets/rgbd_dataset_freiburg1_xyz Examples/datasets/rgbd_dataset_freiburg1_xyz/associations.txt
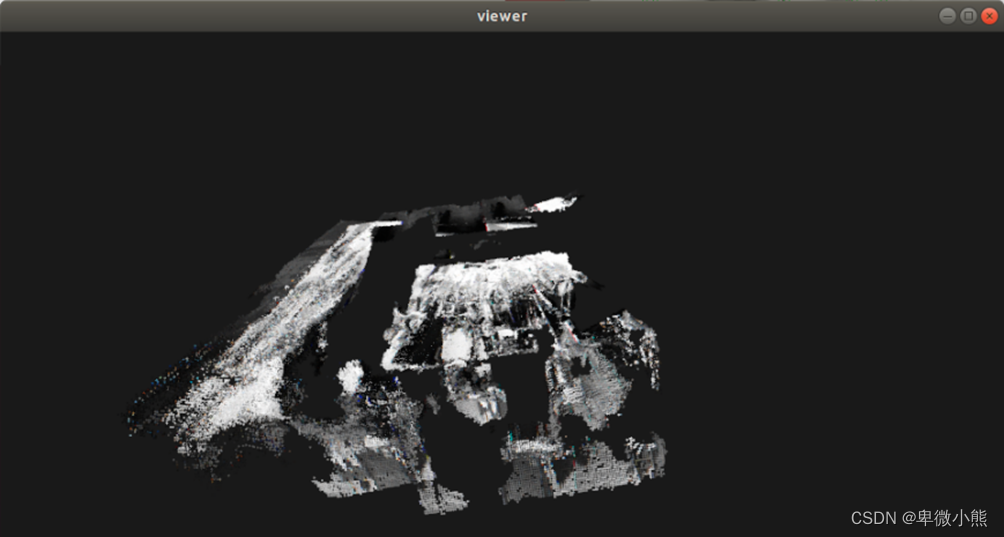
注意了 有些同学操作的时候可能会出现这种情况
终端没有报错,摄像头的数据也出来了,位姿信息也出来了,点云却是这样的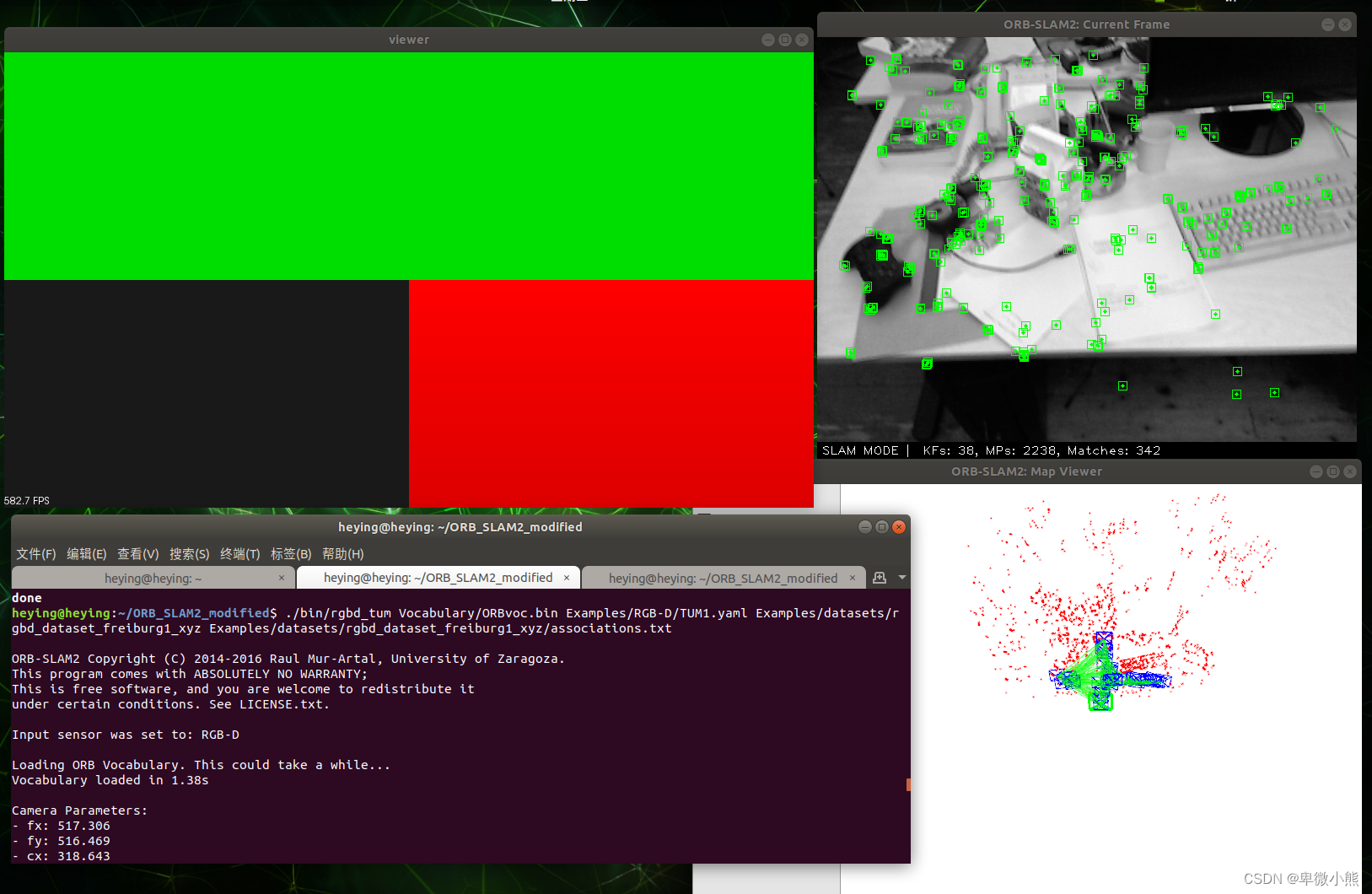
不用紧张,你只需要鼠标移动到【viewer】窗口,然后用鼠标滚轮缩小界面就行,出现这三种颜色是因为点云显示的坐标是这三种颜色,窗口离这个坐标太近了,全被挡住了。所以只需要鼠标移动一下即可(tnnd,还以为是啥严重的问题,卡了我一个小时,偶然移动一下才知道是这破原因)
普通模式参数的修改
可以看到在上述显示中,点云地图是黑白的,视觉效果不太好,在高博的 github issue 中有建立彩色点云地图的方法https://github.com/gaoxiang12/ORBSLAM2_with_pointcloud_map/issues/10#issuecomment-309663764
首先修改文件
~/ORB_SLAM2_modified/include/Tracking.h
// Current Frame
Frame mCurrentFrame;
cv::Mat mImRGB;//Modified place 1
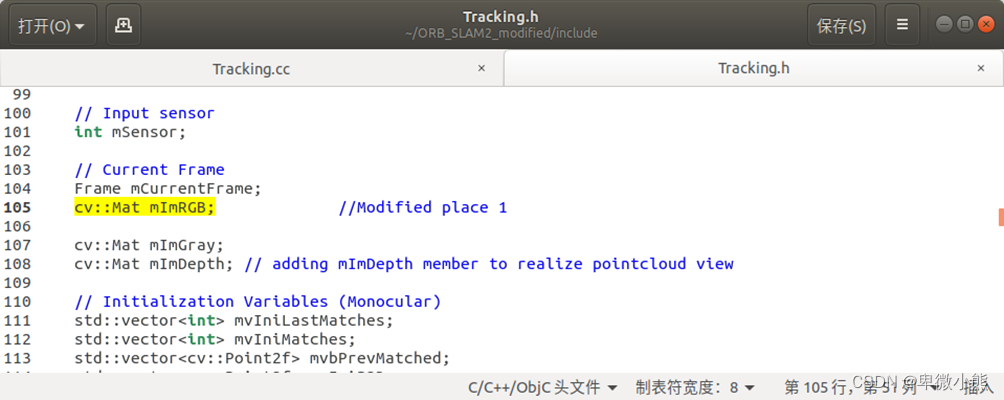
完成后保存并退出
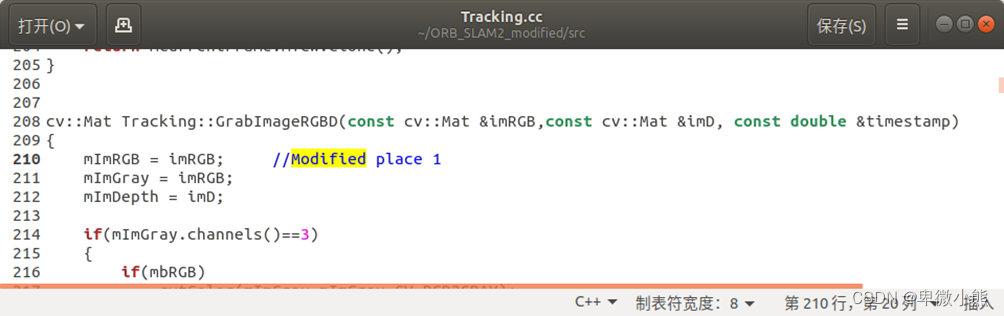
然后修改
~/ORB_SLAM2_modified/src/Tracking.cc
第一处
cv::Mat Tracking::GrabImageRGBD(const cv::Mat &imRGB,const cv::Mat &imD,constdouble×tamp){
mImRGB = imRGB;//Modified place 1
mImGray = imRGB;
mImDepth = imD;
第二处
// insert Key Frame into point cloud viewer
mpPointCloudMapping->insertKeyFrame( pKF,this->mImGray,this->mImDepth );
mpPointCloudMapping->insertKeyFrame( pKF,this->mImRGB,this->mImDepth );//Modified place 2
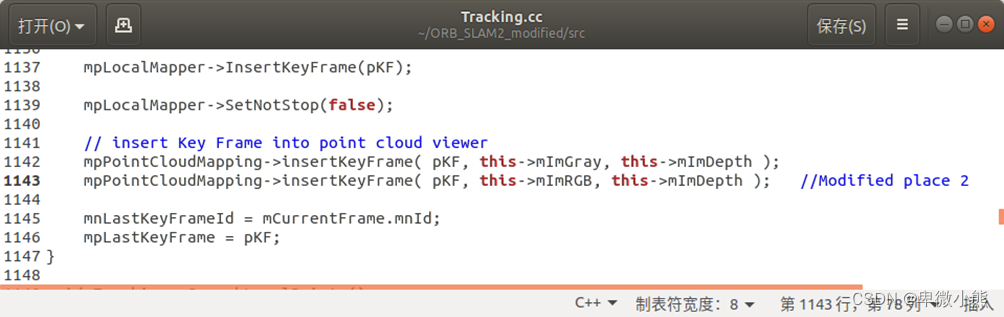
完成后保存并退出
执行build.sh,重新编译
build.sh
普通模式颜色测试
然后启动测试
./bin/rgbd_tum Vocabulary/ORBvoc.bin Examples/RGB-D/TUM1.yaml Examples/datasets/rgbd_dataset_freiburg1_xyz Examples/datasets/rgbd_dataset_freiburg1_xyz/associations.txt
可以看到出现了彩色的信息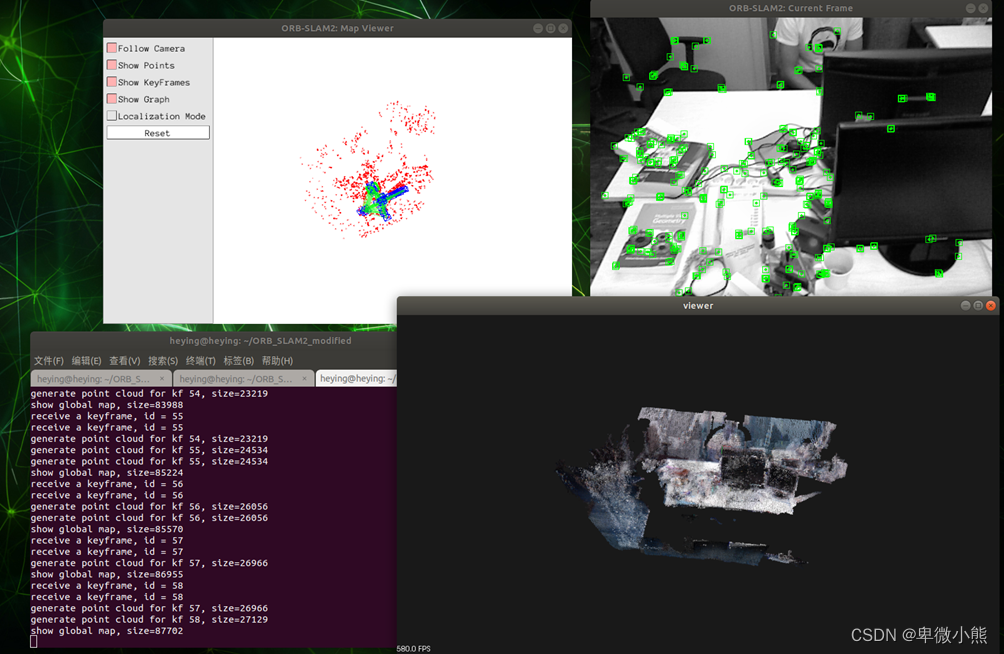
ROS模式
如果要以 ROS 的形式运行,还需要对下载回的文件中的 ROS 文件进行编译。这里也要做一些额外设置
首先设置一下环境变量,也和之前的一样
将ROS 所在目录加入
ROS_PACKAGE_PATH
环境变量中
打开位于主目录的
.bashrc
文件,进行修改
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:~/ORB_SLAM2_modified/Examples/ROS

完成后保存并退出
然后设置修改ROS文件夹的
CMakeLists.txt
文件夹
我们需要做的就是参照
~/ORB_SLAM2_modified/CMakeLists.txt
文件,把 PCL 相关的设置添加到
~/ORB_SLAM2_modified/Examples/ROS/ORB_SLAM2/CMakeLists.txt
文件中。
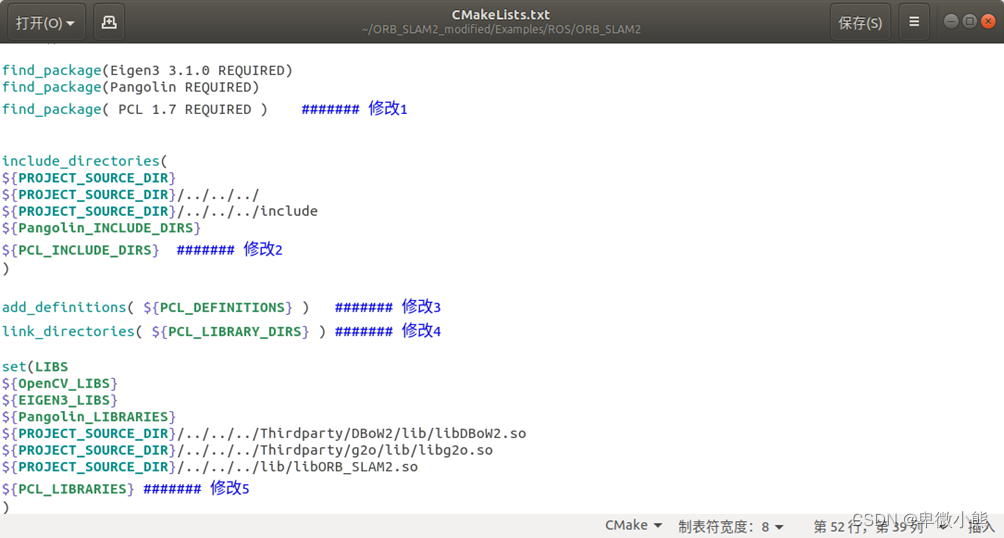
将这个文件打开,进行以下修改
find_package(Eigen3 3.1.0 REQUIRED)find_package(Pangolin REQUIRED)find_package( PCL 1.7 REQUIRED ) ####### 修改1include_directories(
${PROJECT_SOURCE_DIR}
${PROJECT_SOURCE_DIR}/../../../
${PROJECT_SOURCE_DIR}/../../../include
${Pangolin_INCLUDE_DIRS}
${PCL_INCLUDE_DIRS} ####### 修改2)add_definitions( ${PCL_DEFINITIONS}) ####### 修改3link_directories( ${PCL_LIBRARY_DIRS}) ####### 修改4set(LIBS
${OpenCV_LIBS}
${EIGEN3_LIBS}
${Pangolin_LIBRARIES}
${PROJECT_SOURCE_DIR}/../../../Thirdparty/DBoW2/lib/libDBoW2.so
${PROJECT_SOURCE_DIR}/../../../Thirdparty/g2o/lib/libg2o.so
${PROJECT_SOURCE_DIR}/../../../lib/libORB_SLAM2.so
${PCL_LIBRARIES} ####### 修改5)
做完以上修改之后,再删掉
~/ORB_SLAM2_modified/Examples/ROS/ORB_SLAM2/build
文件夹
然后运行 build_ros.sh 编译 ROS 文件
.build_ros.sh
编译完成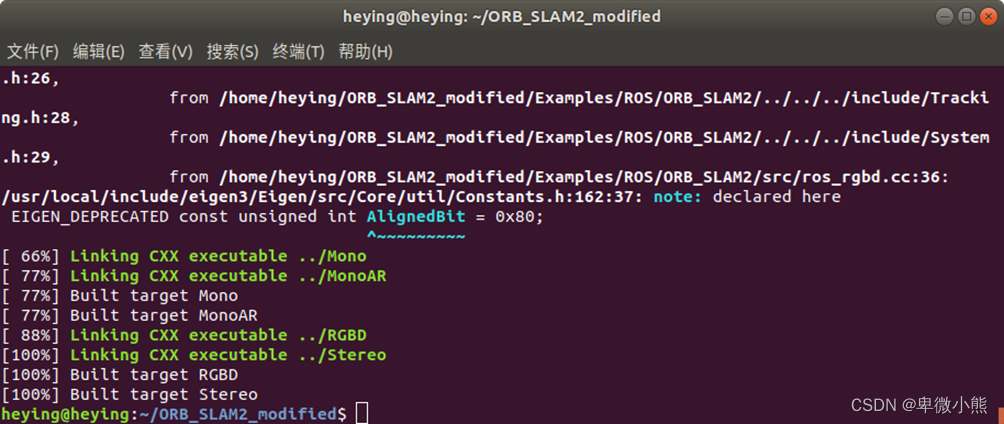
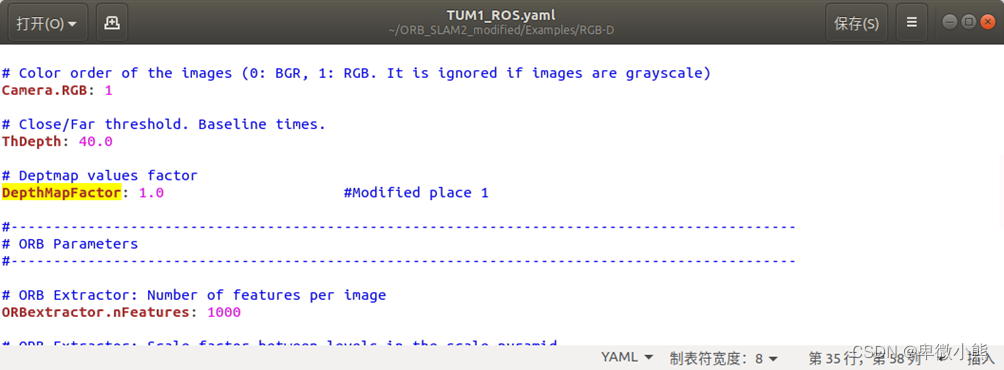
在
Examples/RGB-D/TUM1.yaml
中保存了相机的各种参数,其中有一个参数名为
DepthMapFactor
。
在TUM 数据官网中
https://vision.in.tum.de/data/datasets/rgbd-dataset/file_formats#intrinsic_camera_calibration_of_the_kinect
factor =5000 # for the 16-bit PNG files
#OR: factor =1 # for the 32-bit float images in the ROS bag files
因此,在运行 ROS 之前需要将这个参数改为
DepthMapFactor: 1.0
。
具体操作时,复制了
TUM1.yaml
文件,命名为
TUM1_ROS.yaml
,修改其中的参数
DepthMapFactor: 1.0
。
然后要记得在上一节的流程中下载的bag包的复制粘贴到
/home/heying/ORB_SLAM2_modified/Examples/datasets
ROS模式测试
修改之后,运行以下命令进行测试
roscore
rosrun ORB_SLAM2 RGBD Vocabulary/ORBvoc.bin Examples/RGB-D/TUM1_ROS.yaml
播放bag包,不过需要对播放出来的数据话题做转换
rosbag play --pause Examples/datasets/rgbd_dataset_freiburg1_xyz.bag /camera/rgb/image_color:=/camera/rgb/image_raw /camera/depth/image:=/camera/depth_registered/image_raw
当按下空格键播放后,便可以看到输出的点云地图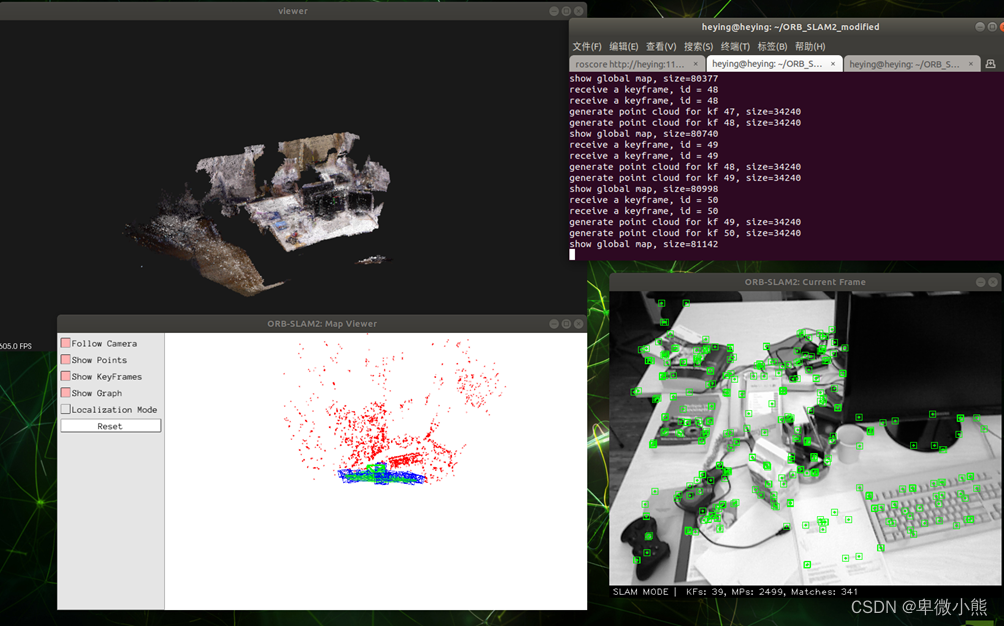
地图保存
参考文件
PCL:读取指定路径下的pcd点云 | 将点云保存至指定路径
问题这些只能实时查看点云地图,不能保存。我们可以稍微修改一下文件
~/ORB_SLAM2_modified/src/pointcloudmapping.cc
,在其中调用 PCL 库的
pcl::io::savePCDFileBinary
函数就可以保存点云地图了。
首先打开文件
gedit src/pointcloudmapping.cc
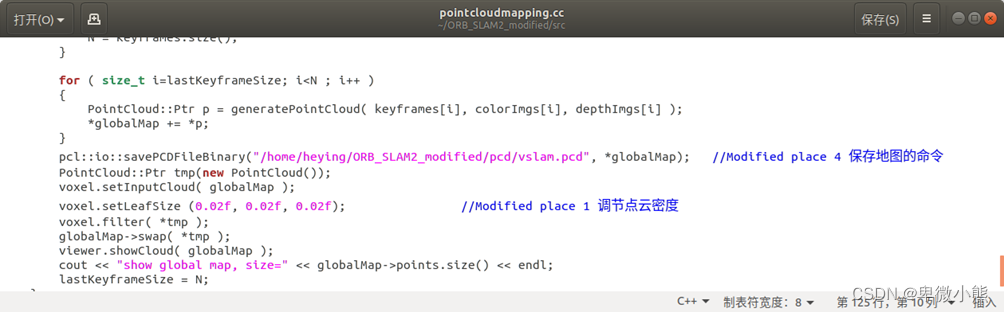
进行修改
//添加头文件#include<pcl/io/pcd_io.h>//Modified place3 地图保存的头文件

//保存地图,这里为了管理,新建了pcd文件,将所有保存的pcd放入里面
pcl::io::savePCDFileBinary("/home/heying/ORB_SLAM2_modified/pcd/vslam.pcd",*globalMap);//Modified place 4 保存地图的命令
完成后保存并退出,然后进行编译
cd build/
make -j4
编译完成
然后再运行前述的各个 SLAM 命令就可以在 ~/ORB_SLAM2_modified/pcd路径下产生一个名为 vslam.pcd 的点云文件。
roscore
rosrun ORB_SLAM2 RGBD Vocabulary/ORBvoc.bin Examples/RGB-D/TUM1_ROS.yaml
rosbag play --pause Examples/datasets/rgbd_dataset_freiburg1_xyz.bag /camera/rgb/image_color:=/camera/rgb/image_raw /camera/depth/image:=/camera/depth_registered/image_raw
正常运行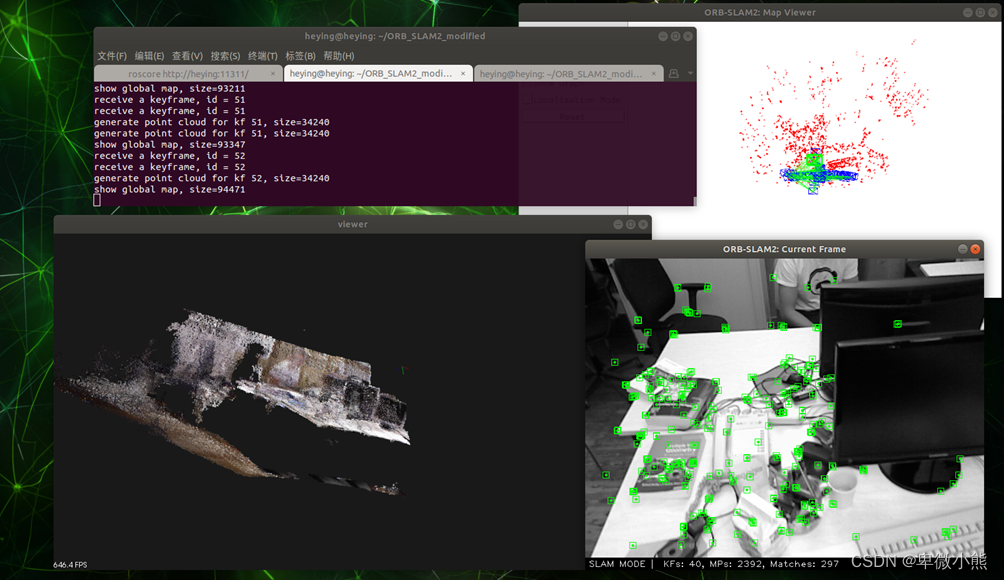
当播放完成后程序现在不会自动关闭,需要按下
CTRL+C
停止,
然后可以看到在
~/ORB_SLAM2_modified/pcd
路径下产生一个名为 vslam.pcd 的点云文件。
为了查看这个 pcd 文件,我们需要安装相应的工具
sudo apt-get install pcl-tools
完成后通过 pcl_viewer 查看 vslam.pcd
pcl_viewer vslam.pcd
开启成功
至此,使用离线包实现摄像头SLAM构建点云地图的流程完成
版权归原作者 卑微小熊 所有, 如有侵权,请联系我们删除。