
文章目录
前言
本文的目的是根据已知相机参数的blender模型,使用colmap进行稀疏重建和稠密重建。使用的blender数据是NeRF提供的synthetic数据集中的lego模型,其中的几张图片如下:
一、数据准备
文件夹应按如下层级组织:
E:\rootpath
├─created
│ └─sparse
│ +── cameras.txt
│ +── images.txt
│ +── points3D.txt
├─dense
├─images
│ +── r_0.png
│ +── r_1.png
│ +── ...
├─model
└─triangulated
└─sparse
+── transforms_train.json
+── blender_camera2colmap.py
+── transform_colmap_camera.py
其中 created/sparse 文件夹下的 cameras.txt 对应我们指定的相机内参,images.txt 对应每张图片的相机外参信息,points3D.txt 对应稠密重建需要用到的稀疏点云。 dense 文件夹下保存colmap稠密重建结果,images 文件夹下存放输入的图片,也就是NeRF的训练视图, model 文件夹下存放colmap导出的稀疏重建结果,triangulated/sparse 文件夹下保存colmap稀疏重建结果,transforms_train.json 是NeRF blender数据集提供的真实的相机内外参数据,最后两个python文件是后面要用到的脚本。
二、从blender数据构造colmap数据集
这一步是为了读取NeRF的blender相机参数数据,转换成colmap可以使用的数据格式。blender相机参数采用右手坐标系,相机的位姿用于从相机坐标系向世界坐标系转换,以旋转矩阵 R 和平移向量 T 的格式给出;colmap相机参数采用opecv格式的坐标系,相机的位姿用于从世界坐标系向相机坐标系转换,以四元数 Quat 和平移向量 T 的格式给出,因此需要手动进行转换以获得cameras.txt ,images.txt 和 points3D.txt。三个文件各自的格式规定如下:
cameras.txt
# Camera list with one line of data per camera:# CAMERA_ID, MODEL, WIDTH, HEIGHT, PARAMS[fx,fy,cx,cy]# Number of cameras: 11 PINHOLE 8008001111.11103119376821111.1110311937682400.0400.0
images.txt
# Image list with two lines of data per image:# IMAGE_ID, QW, QX, QY, QZ, TX, TY, TZ, CAMERA_ID, NAME# POINTS2D[] as (X, Y, POINT3D_ID)# Number of images: 100, mean observations per image: 10010.00410.0056 -0.8064 0.59196.3306e-10 -5.1536e-08 4.03111 r_0.png
# Make sure every other line is left empty20.10860.15132 -0.7980 0.57294.9764e-08 -2.7316e-08 4.03111 r_1.png
30.54500.6810 -0.3817 0.3055 -1.2894e-07 -2.6036e-08 4.03111 r_10.png
points3D.txt
# 3D point list with one line of data per point:# POINT3D_ID, X, Y, Z, R, G, B, ERROR, TRACK[] as (IMAGE_ID, POINT2D_IDX)# Number of points: 12888, mean track length: 4.5869025450031033944 -0.3789 0.5152 -0.1104 5865880.0692135214953734461054 -0.1167 -0.3606 -0.0849 1801761870.2641131285491440313075 -0.1028 -0.4174 0.8981231870.02056533123
完成该转换的 blender_camera2colmap.py 脚本内容如下:
# 该脚本是为了从blender数据集的tranforms_train.json构造colmap的相机参数和图片参数数据集,以便使用指定相机视角的colmap进行重建。# 参考:https://www.cnblogs.com/li-minghao/p/11865794.html# 运行方法:python blender_camera2colmap.pyimport numpy as np
import json
import os
import imageio
import math
# TODO: change image size
H =800
W =800
blender2opencv = np.array([[1,0,0,0],[0,-1,0,0],[0,0,-1,0],[0,0,0,1]])# 注意:最后输出的图片名字要按自然字典序排列,例:0, 1, 100, 101, 102, 2, 3...因为colmap内部是这么排序的
fnames =list(sorted(os.listdir('images')))
fname2pose ={}withopen('transforms_train.json','r')as f:
meta = json.load(f)
fx =0.5* W / np.tan(0.5* meta['camera_angle_x'])# original focal lengthif'camera_angle_y'in meta:
fy =0.5* H / np.tan(0.5* meta['camera_angle_y'])# original focal lengthelse:
fy = fx
if'cx'in meta:
cx, cy = meta['cx'], meta['cy']else:
cx =0.5* W
cy =0.5* H
withopen('created/sparse/cameras.txt','w')as f:
f.write(f'1 PINHOLE {W}{H}{fx}{fy}{cx}{cy}')
idx =1for frame in meta['frames']:
fname = frame['file_path'].split('/')[-1]ifnot(fname.endswith('.png')or fname.endswith('.jpg')):
fname +='.png'# blend到opencv的转换:y轴和z轴方向翻转
pose = np.array(frame['transform_matrix']) @ blender2opencv
fname2pose.update({fname: pose})withopen('created/sparse/images.txt','w')as f:for fname in fnames:
pose = fname2pose[fname]# 参考https://blog.csdn.net/weixin_44120025/article/details/124604229:colmap中相机坐标系和世界坐标系是相反的# blender中:world = R * camera + T; colmap中:camera = R * world + T# 因此转换公式为# R’ = R^-1# t’ = -R^-1 * t
R = np.linalg.inv(pose[:3,:3])
T =-np.matmul(R, pose[:3,3])
q0 =0.5* math.sqrt(1+ R[0,0]+ R[1,1]+ R[2,2])
q1 =(R[2,1]- R[1,2])/(4* q0)
q2 =(R[0,2]- R[2,0])/(4* q0)
q3 =(R[1,0]- R[0,1])/(4* q0)
f.write(f'{idx}{q0}{q1}{q2}{q3}{T[0]}{T[1]}{T[2]} 1 {fname}\n\n')
idx +=1withopen('created/sparse/points3D.txt','w')as f:
f.write('')
直接在根目录 rootpath 下运行
python blender_camera2colmap.py
即可获得 created/sparse 文件下所需的内容。
三、COLMAP重建流程
1. 抽取图像特征
colmap feature_extractor --database_path database.db --image_path images
终端输出示例如下:
==============================================================================
Feature extraction
==============================================================================
Processed file[1/100]
Name: r_0.png
Dimensions: 800 x 800
Camera: #1 - SIMPLE_RADIAL
Focal Length: 960.00px
Features: 2403
Processed file[2/100]
Name: r_1.png
Dimensions: 800 x 800
Camera: #2 - SIMPLE_RADIAL
Focal Length: 960.00px
Features: 2865
Processed file[3/100]....................
Elapsed time: 0.075[minutes]
2. 导入指定相机内参
前一步colmap获得了估计的相机内参,但我们有真实的相机内参,所以将colmap估出来的相机内参提环成我们自己的,使用的 transform_colmap_camera.py 脚本内容如下:
# This script is based on an original implementation by True Price.# 用于手动从database.db中读取相机参数并更改为cameras.txt中的相机参数# 参考:https://www.cnblogs.com/li-minghao/p/11865794.htmlimport sys
import numpy as np
import sqlite3
IS_PYTHON3 = sys.version_info[0]>=3
MAX_IMAGE_ID =2**31-1
CREATE_CAMERAS_TABLE ="""CREATE TABLE IF NOT EXISTS cameras (
camera_id INTEGER PRIMARY KEY AUTOINCREMENT NOT NULL,
model INTEGER NOT NULL,
width INTEGER NOT NULL,
height INTEGER NOT NULL,
params BLOB,
prior_focal_length INTEGER NOT NULL)"""
CREATE_DESCRIPTORS_TABLE ="""CREATE TABLE IF NOT EXISTS descriptors (
image_id INTEGER PRIMARY KEY NOT NULL,
rows INTEGER NOT NULL,
cols INTEGER NOT NULL,
data BLOB,
FOREIGN KEY(image_id) REFERENCES images(image_id) ON DELETE CASCADE)"""
CREATE_IMAGES_TABLE ="""CREATE TABLE IF NOT EXISTS images (
image_id INTEGER PRIMARY KEY AUTOINCREMENT NOT NULL,
name TEXT NOT NULL UNIQUE,
camera_id INTEGER NOT NULL,
prior_qw REAL,
prior_qx REAL,
prior_qy REAL,
prior_qz REAL,
prior_tx REAL,
prior_ty REAL,
prior_tz REAL,
CONSTRAINT image_id_check CHECK(image_id >= 0 and image_id < {}),
FOREIGN KEY(camera_id) REFERENCES cameras(camera_id))
""".format(MAX_IMAGE_ID)
CREATE_TWO_VIEW_GEOMETRIES_TABLE ="""
CREATE TABLE IF NOT EXISTS two_view_geometries (
pair_id INTEGER PRIMARY KEY NOT NULL,
rows INTEGER NOT NULL,
cols INTEGER NOT NULL,
data BLOB,
config INTEGER NOT NULL,
F BLOB,
E BLOB,
H BLOB,
qvec BLOB,
tvec BLOB)
"""
CREATE_KEYPOINTS_TABLE ="""CREATE TABLE IF NOT EXISTS keypoints (
image_id INTEGER PRIMARY KEY NOT NULL,
rows INTEGER NOT NULL,
cols INTEGER NOT NULL,
data BLOB,
FOREIGN KEY(image_id) REFERENCES images(image_id) ON DELETE CASCADE)
"""
CREATE_MATCHES_TABLE ="""CREATE TABLE IF NOT EXISTS matches (
pair_id INTEGER PRIMARY KEY NOT NULL,
rows INTEGER NOT NULL,
cols INTEGER NOT NULL,
data BLOB)"""
CREATE_NAME_INDEX = \
"CREATE UNIQUE INDEX IF NOT EXISTS index_name ON images(name)"
CREATE_ALL ="; ".join([
CREATE_CAMERAS_TABLE,
CREATE_IMAGES_TABLE,
CREATE_KEYPOINTS_TABLE,
CREATE_DESCRIPTORS_TABLE,
CREATE_MATCHES_TABLE,
CREATE_TWO_VIEW_GEOMETRIES_TABLE,
CREATE_NAME_INDEX
])defarray_to_blob(array):if IS_PYTHON3:return array.tostring()else:return np.getbuffer(array)defblob_to_array(blob, dtype, shape=(-1,)):if IS_PYTHON3:return np.fromstring(blob, dtype=dtype).reshape(*shape)else:return np.frombuffer(blob, dtype=dtype).reshape(*shape)classCOLMAPDatabase(sqlite3.Connection):@staticmethoddefconnect(database_path):return sqlite3.connect(database_path, factory=COLMAPDatabase)def__init__(self,*args,**kwargs):super(COLMAPDatabase, self).__init__(*args,**kwargs)
self.create_tables =lambda: self.executescript(CREATE_ALL)
self.create_cameras_table = \
lambda: self.executescript(CREATE_CAMERAS_TABLE)
self.create_descriptors_table = \
lambda: self.executescript(CREATE_DESCRIPTORS_TABLE)
self.create_images_table = \
lambda: self.executescript(CREATE_IMAGES_TABLE)
self.create_two_view_geometries_table = \
lambda: self.executescript(CREATE_TWO_VIEW_GEOMETRIES_TABLE)
self.create_keypoints_table = \
lambda: self.executescript(CREATE_KEYPOINTS_TABLE)
self.create_matches_table = \
lambda: self.executescript(CREATE_MATCHES_TABLE)
self.create_name_index =lambda: self.executescript(CREATE_NAME_INDEX)defupdate_camera(self, model, width, height, params, camera_id):
params = np.asarray(params, np.float64)
cursor = self.execute("UPDATE cameras SET model=?, width=?, height=?, params=?, prior_focal_length=1 WHERE camera_id=?",(model, width, height, array_to_blob(params),camera_id))return cursor.lastrowid
defcamTodatabase(txtfile):import os
import argparse
camModelDict ={'SIMPLE_PINHOLE':0,'PINHOLE':1,'SIMPLE_RADIAL':2,'RADIAL':3,'OPENCV':4,'FULL_OPENCV':5,'SIMPLE_RADIAL_FISHEYE':6,'RADIAL_FISHEYE':7,'OPENCV_FISHEYE':8,'FOV':9,'THIN_PRISM_FISHEYE':10}
parser = argparse.ArgumentParser()
parser.add_argument("--database_path", default="database.db")
args = parser.parse_args()if os.path.exists(args.database_path)==False:print("ERROR: database path dosen't exist -- please check database.db.")return# Open the database.
db = COLMAPDatabase.connect(args.database_path)
idList=list()
modelList=list()
widthList=list()
heightList=list()
paramsList=list()# Update real cameras from .txtwithopen(txtfile,"r")as cam:
lines = cam.readlines()for i inrange(0,len(lines),1):if lines[i][0]!='#':
strLists = lines[i].split()
cameraId=int(strLists[0])
cameraModel=camModelDict[strLists[1]]#SelectCameraModel
width=int(strLists[2])
height=int(strLists[3])
paramstr=np.array(strLists[4:12])
params = paramstr.astype(np.float64)
idList.append(cameraId)
modelList.append(cameraModel)
widthList.append(width)
heightList.append(height)
paramsList.append(params)
camera_id = db.update_camera(cameraModel, width, height, params, cameraId)# Commit the data to the file.
db.commit()# Read and check cameras.
rows = db.execute("SELECT * FROM cameras")for i inrange(0,len(idList),1):
camera_id, model, width, height, params, prior =next(rows)
params = blob_to_array(params, np.float64)assert camera_id == idList[i]assert model == modelList[i]and width == widthList[i]and height == heightList[i]assert np.allclose(params, paramsList[i])# Close database.db.
db.close()if __name__ =="__main__":
camTodatabase("created/sparse/cameras.txt")
直接在根目录 rootpath 下运行
python transform_colmap_camera.py
即可完成database.db中相机内参的替换。
3. 特征匹配
colmap exhaustive_matcher --database_path database.db
终端输出示例如下:
==============================================================================
Exhaustive feature matching
==============================================================================
Matching block [1/2, 1/2]in5.688s
Matching block [1/2, 2/2]in5.234s
Matching block [2/2, 1/2]in5.609s
Matching block [2/2, 2/2]in5.165s
Elapsed time: 0.364[minutes]
4. 三角测量
colmap point_triangulator --database_path database.db --image_path images --input_path created/sparse --output_path triangulated/sparse
终端输出示例如下:
==============================================================================
Loading model
============================================================================================================================================================
Loading database
==============================================================================
Loading cameras... 100in0.000s
Loading matches... 1330in0.003s
Loading images... 100in0.012s (connected 100)
Building correspondence graph... in0.025s (ignored 0)
Elapsed time: 0.001[minutes]==============================================================================
Triangulating image #1 (0)===============================================================================> Image sees 0 / 465 points
=> Triangulated 284 points
....................
Bundle adjustment report
------------------------
Residuals :118254
Parameters :38718
Iterations :3
Time :0.102123[s]
Initial cost :0.469918[px]
Final cost :0.469793[px]
Termination : Convergence
=> Completed observations: 2=> Merged observations: 0=> Filtered observations: 1=> Changed observations: 0.000051==============================================================================
Extracting colors
==============================================================================
5. 使用指定相机参数进行稠密重建
运行
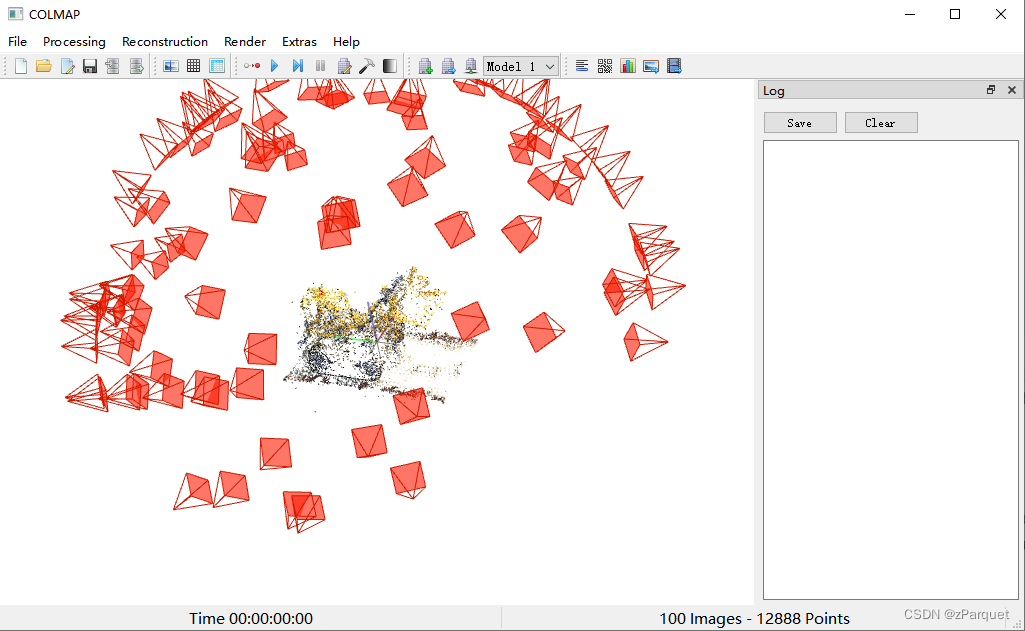
colmap gui
在COLMAP图形界面中选择 “File”->“Import Model” ,可以把triangulated/sparse下的内容导入进来看相机视角和稀疏点云重建的如何,以此确定前面的步骤是否执行正确。如果提示“找不到project.ini”可以忽略。我的效果如下:
【注意:接下来这一步很重要】
然后选择 “File”->“Export model as txt”,把结果保存在 model 文件夹下,这里包括了colmap稀疏重建估出来的相机内外参和稀疏点云数据。我们把 model/points3D.txt 文件复制到 created/sparse 文件夹下,覆盖掉原来空的 points3D.txt 文件,这是接下来稠密重建需要用到的稀疏点云数据。
接下来运行
colmap image_undistorter --image_path images --input_path created/sparse --output_path dense
终端输出示例如下:
==============================================================================
Reading reconstruction
===============================================================================> Reconstruction with 100 images and 12906 points
==============================================================================
Image undistortion
==============================================================================
Undistorted image found; copying to location: dense\images\r_0.pngUndistorted image found; copying to location: dense\images\r_10.png
Undistorting image [1/100]
Undistorted image found; copying to location: dense\images\r_13.png
Undistorted image found; copying to location: dense\images\r_14.png
....................
Writing reconstruction...
Writing configuration...
Writing scripts...
Elapsed time: 0.002[minutes]
6. 立体匹配
colmap patch_match_stereo --workspace_path dense
这一步是最耗时的,如果图片多的话,会花费长达几个小时的时间。在lego数据集上大概花费一个小时。终端输出示例如下:
Reading workspace...
Reading configuration...
Configuration has 100 problems...
==============================================================================
Processing view 1 / 100for r_0.png
==============================================================================
Reading inputs...
PatchMatch::Problem
-------------------
ref_image_idx: 0
src_image_idxs: 2036806437611735832471934657477532833
PatchMatchOptions
-----------------
max_image_size: -1
gpu_index: 0
depth_min: 2.2507
depth_max: 6.0306
window_radius: 5
window_step: 1
sigma_spatial: 5
sigma_color: 0.2
num_samples: 15
ncc_sigma: 0.6
min_triangulation_angle: 1
incident_angle_sigma: 0.9
num_iterations: 5
geom_consistency: 0
geom_consistency_regularizer: 0.3
geom_consistency_max_cost: 3
filter: 0
filter_min_ncc: 0.1
filter_min_triangulation_angle: 3
filter_min_num_consistent: 2
filter_geom_consistency_max_cost: 1
write_consistency_graph: 0
allow_missing_files: 0
PatchMatch::Run
---------------
Initialization: 0.1131s
Sweep 1: 0.4373s
Sweep 2: 0.3998s
Sweep 3: 0.4118s
Sweep 4: 0.3944s
Iteration 1: 1.6447s
Sweep 1: 0.4101s
Sweep 2: 0.3992s
....................
Writing geometric output for r_99.png
Elapsed time: 61.006[minutes]
7. 稠密点云融合
colmap stereo_fusion --workspace_path dense --output_path dense/fused.ply
终端输出示例如下:
StereoFusion::Options
---------------------
mask_path:
max_image_size: -1
min_num_pixels: 5
max_num_pixels: 10000
max_traversal_depth: 100
max_reproj_error: 2
max_depth_error: 0.01
max_normal_error: 10
check_num_images: 50
use_cache: 0
cache_size: 32
bbox_min: -3.40282e+38 -3.40282e+38 -3.40282e+38
bbox_max: 3.40282e+38 3.40282e+38 3.40282e+38
Reading workspace...
Loading workspace data with 8 threads...
Elapsed time: 0.021[minutes]
Reading configuration...
Starting fusion with 8 threads
Fusing image [1/100] with index 0in2.167s (36527 points)
Fusing image [2/100] with index 36in0.655s (50311 points)
Fusing image [3/100] with index 61in0.568s (61807 points)....................
Number of fused points: 493937
Elapsed time: 0.399[minutes]
Writing output: dense/fused.ply
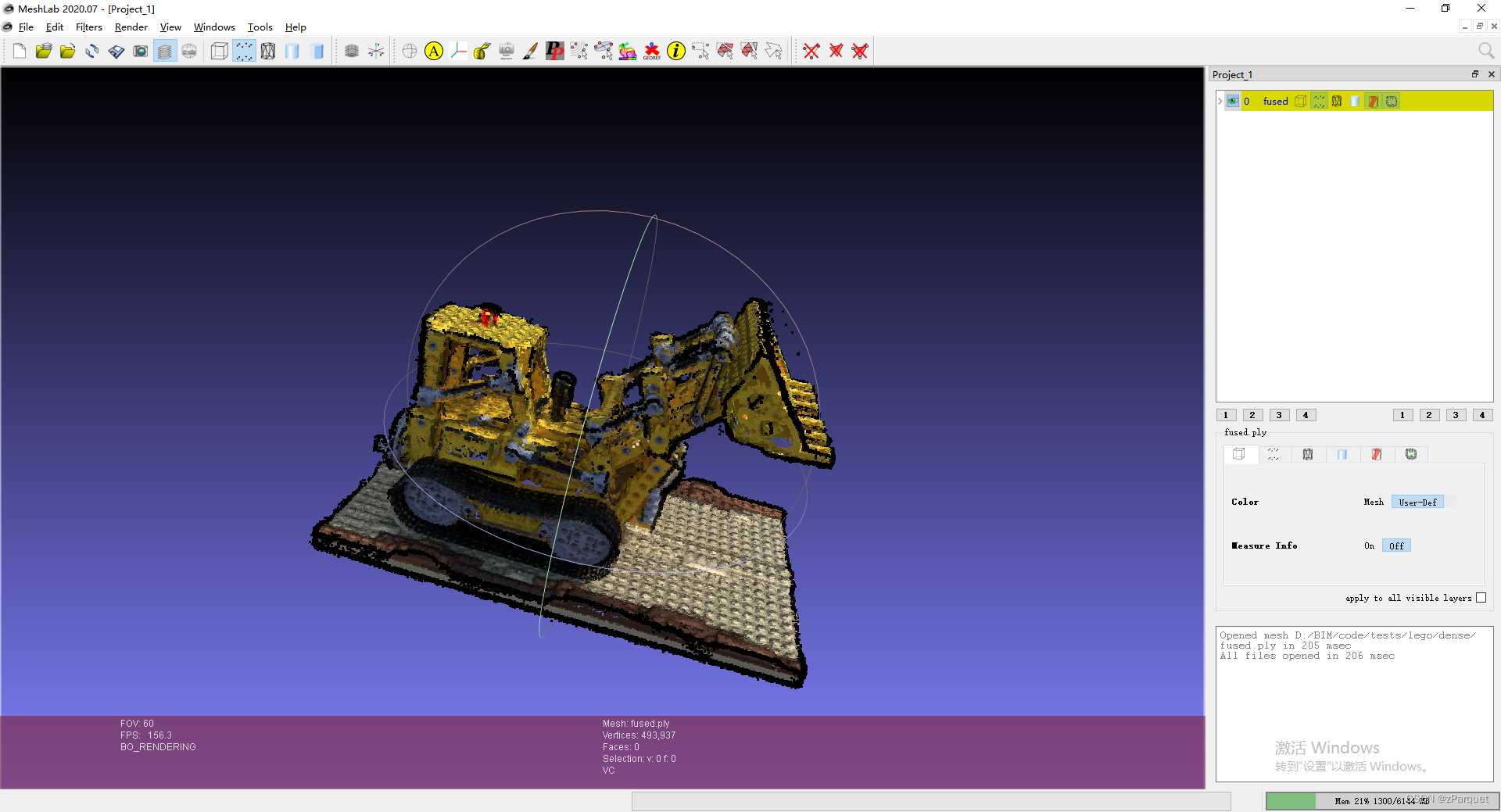
8. 网格重建
这最后一步COLMAP命令行模式下使用起来比较复杂,建议在meshlab软件中操作。首先用meshlab打开 fused.ply:
选择 “Filters”->“Remeshing, Simplification and Reconstruction”->“Surface Reconstruction: Screened Poisson”,参数可以自行调节。
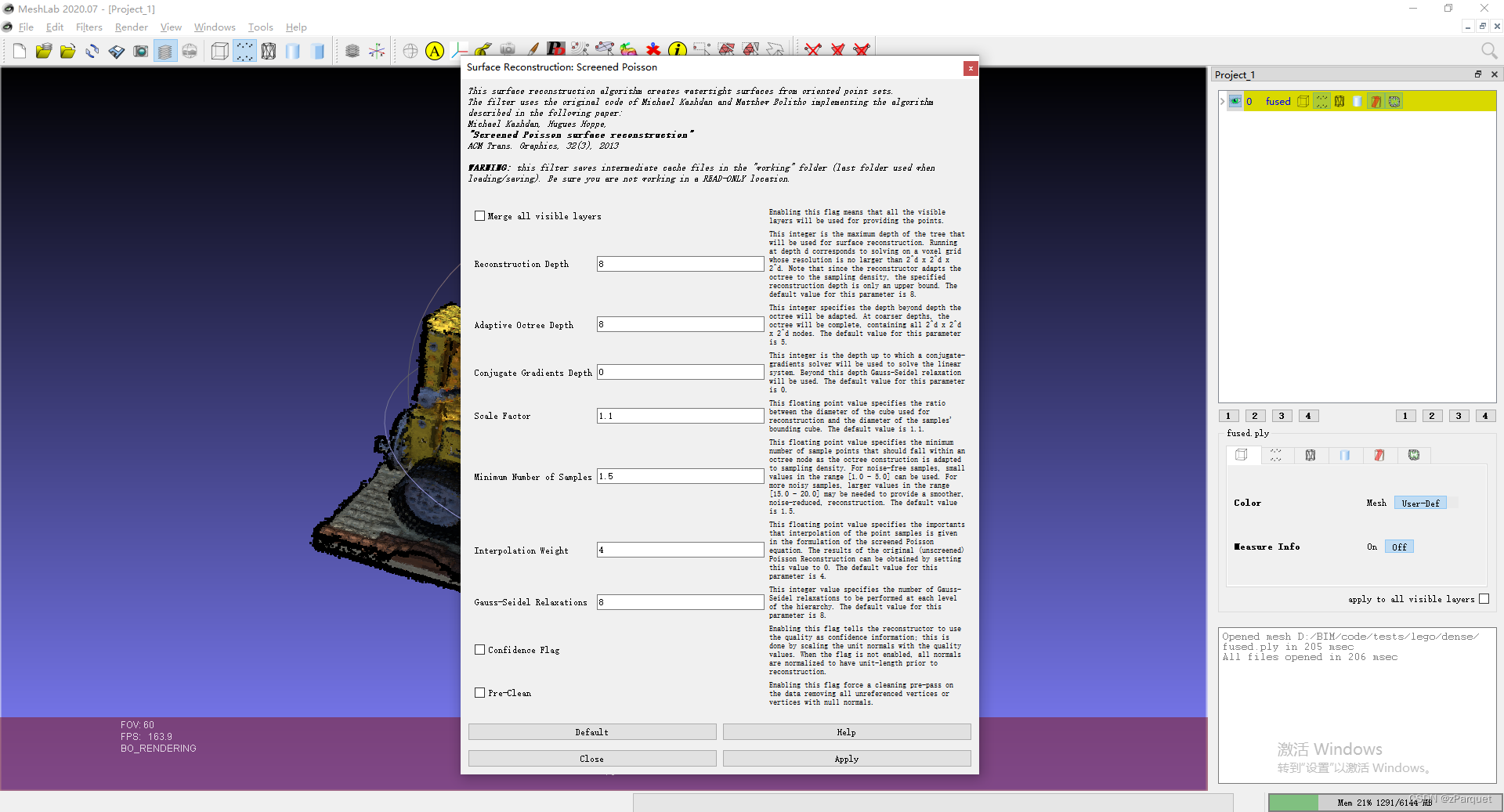
这里建议将 Adaptive Octree Depth 调为和 Reconstruction Depth 一致。该数值为重建网格的分辨率,设置为
8
8
8即为
25
6
3
256^3
2563的分辨率。点击 **“Apply”**开始重建,在meshlab中观察重建好的mesh效果如下:
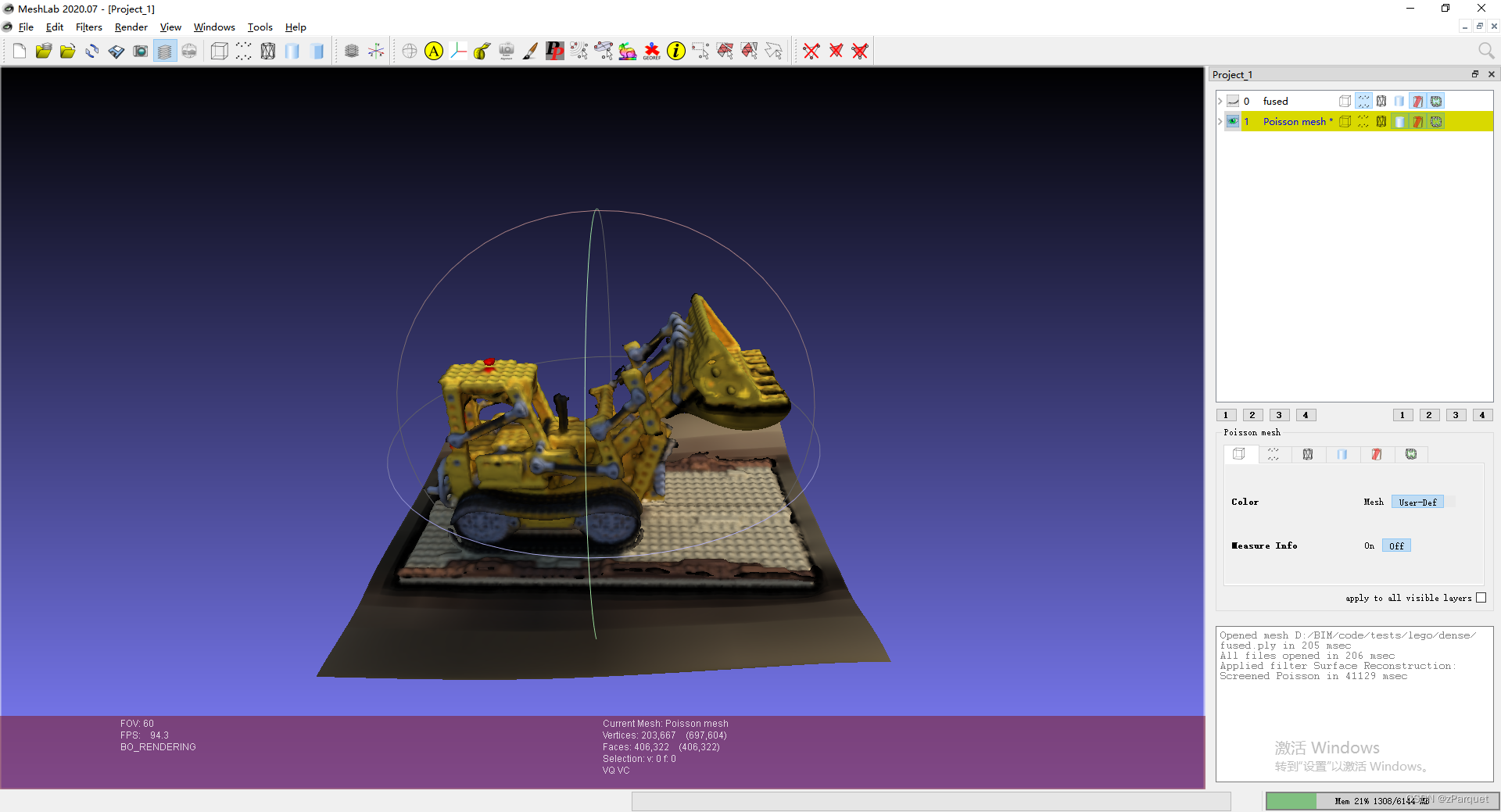
之后选择 “File”->“Export Mesh” 保存重建好的mesh即可。
总结
COLMAP的重建流程比较复杂,最后总结一下所有用到的命令:
0. 构造数据集
准备好images里的图片和对应的相机参数文件transforms_train.json,然后
python blender_camera2colmap.py
1. 抽取图像特征
colmap feature_extractor --database_path database.db --image_path images
2. 自动导入指定相机内参
python transform_colmap_camera.py
3. 特征匹配
colmap exhaustive_matcher --database_path database.db
4. 三角测量
colmap point_triangulator --database_path database.db --image_path images --input_path created/sparse --output_path triangulated/sparse
5. 使用指定相机参数进行稠密重建
先在 colmap gui 中导出points3D.txt覆盖到created/sparse里,然后
colmap image_undistorter --image_path images --input_path created/sparse --output_path dense
6. 立体匹配
colmap patch_match_stereo --workspace_path dense
7. 稠密点云融合
colmap stereo_fusion --workspace_path dense --output_path dense/fused.ply
8. 网格重建
在meshlab使用泊松重建
版权归原作者 zParquet 所有, 如有侵权,请联系我们删除。