
目录
一、相关基础
1 相关概念
- 无线传感器网络(Wireless Sensor Networks,WSNs)是一种分布式传感网络,嵌入了传感器的智能设备感测、通信、处理、收集数据,然后通过互联网将数据传输给监测者进行进一步分析,是通过无线通信方式形成的一个多跳自组织网络,可用于大规模物联网应用。由于其传感器通过无线方式通信,所以位置可以随时更改,非常灵活。WSN的覆盖优化问题可以描述为在规定的监测区域内,保证传感器网络连通情况下的节点部署问题。
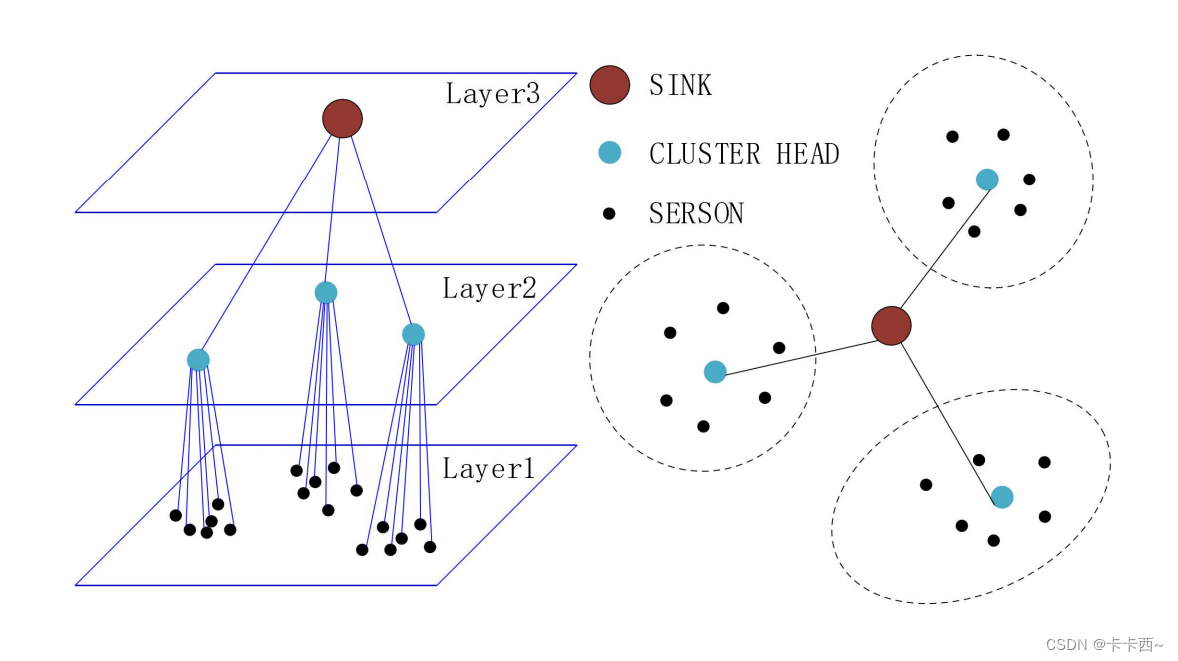
- WSNs系统包括三部分: (1) 传感器节点本质是一个小型嵌入式系统,由传感器模块、处理器模块、无线通信模块、能量供应模块四部分组成,既可充当数据发送者也可充当中间路由者。负责收集本地信息和处理数据(存储,管理,融合),向其它传感器节点传输数据,与其它传感器节点协作完成一些任务; (2)汇聚节点负责将传感器节点收集到的数据汇聚到一起,再通过无线通信方式传送到管理节点; (3)管理节点是终端监测平台,用户通过管理节点对WSNs进行配置管理,发布监测任务及收集监测数据等。传感器节点监测的数据经过多跳后传输到汇聚节点,然后通过互联网或卫星到达管理节点。WSN可以被定义为下图具有三层的二维网络,最底层为分布在目标区域的传感器节点,有若干个簇,每个簇都有一个簇头(汇聚节点),这些簇头组成了中间层,每个传感器节点都可以直接与它们的簇头通信,簇头可以与顶层的Sink节点(管理节点)通信。每轮数据传输分为两个阶段:在簇的建立阶段中,每一轮都先选择最佳部署解决方案 I ,再选举簇头(每一轮的簇头都可以不一样),然后分组(非簇头节点计算与所有簇头的通信消耗,选最低的簇头)。在传输数据阶段中,簇头收集簇内传感器节点的数据,然后发送给sink节点。
- WSNs应用:军事航空,环境监测,医疗保健,工业制造,智慧交通,智慧家庭,智慧城市,救灾等。
- 存在的问题:覆盖盲区(不够),节点冗余(太多,浪费),处理能力、存储能力、通信能力较弱
2 相关分类
2.1 按节点部署方式分类
- 静态WSN:在网络运行前就确定节点的位置,部署后不再做移动。
- 动态WSN:所有节点(传感器节点和汇聚节点)都可移动,根据网络的具体需求(网络扩展、故障修复等)进行动态部署。
- 混合WSN:多数固定节点 + 少数移动节点,主要解决的是移动节点的自我调整部署问题。
2.2 按覆盖目标分类
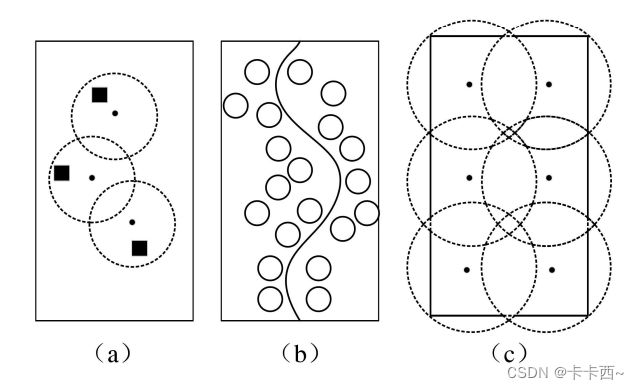
- 点覆盖:如图(a)又叫目标覆盖,图(a)圆点为传感器节点,方块为监测目标,要求每个目标至少被一个传感器节点覆盖。
- 栅栏覆盖:如图(b),要求传感器节点监测移动目标的运动轨迹。主要用于国防边境的非法越境者探测,军事战场敌军入侵侦查,环境保护中的物种迁徙监测等。
- 区域覆盖:如图(c),要求用尽可能少的传感器节点尽量覆盖整个目标区域。 主要用于森林火灾预警,湖泊水面水质监测等大规模应用环境,或者煤矿巷道,工厂车间,仓库等受限区域的安全监控应用。
2.3 按网络中的传感器类型分类
- 同构WSNs:传感器类型一样,网络同质;
- 异构WSNs:传感器类型和感知能力都不一样;在未来的智能城市中,WSNs将是异构的。
2.4 传感器种类
- 全向传感器:二维为圆盘,三维为球,只有覆盖和非覆盖,非0即1,一般基于确定性布尔模型,在实际应用中,各种能力会随着距离增加而降低;
- 定向传感器:各种能力会随着距离和角度增加而降低。
2.5 地形分类
- 平面:二维的;
- 马鞍地形:三维的,如图a;
- 多峰地形:三维的,如图b,比前两种更复杂。
在三维环境中,无线信号会沿着传输路径被反射、散射、衍射。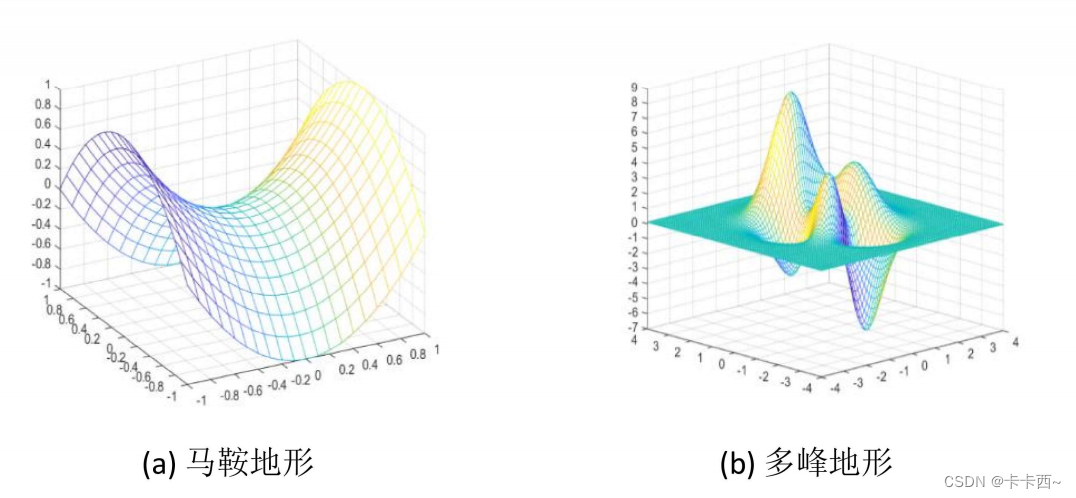
3 评价指标
3.1 覆盖率
网络覆盖率越大,部署效果越好。
3.2 均匀度
传感器节点的均匀度指标E为所有传感器节点间的距离标准差的和的均值,计算如下: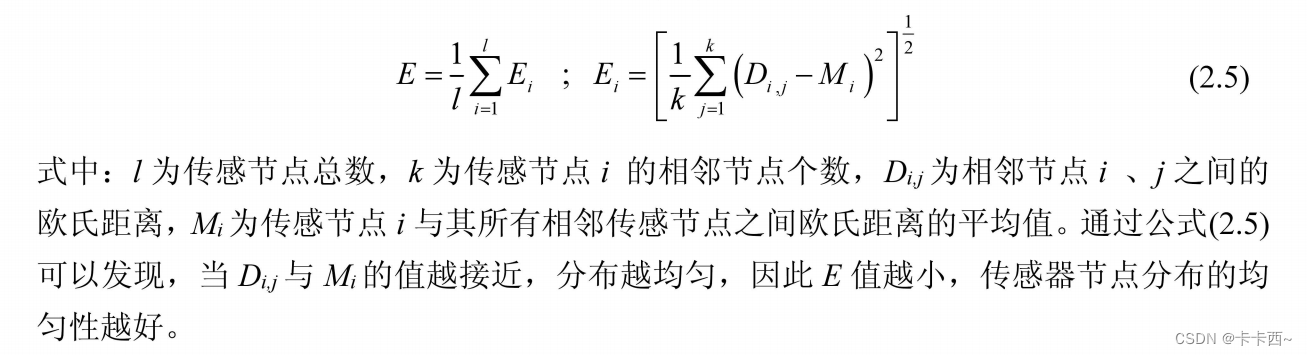
3.3 节点移动距离
各个节点都要从初始化位置移动到算法找到的最佳位置,移动距离越小,消耗的能量越小;
3.4 连通性
节点之间要互相传递信息,所以应该保证网络的连通性。
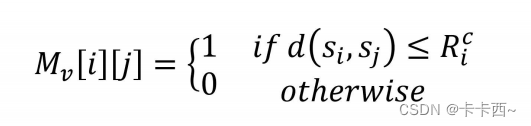
建立有向图邻接矩阵
M
v
M_v
Mv,如果两个传感器节点 i 和 j 的距离不超过 i 的通信半径
R
i
c
R_i^c
Ric,说明 i 可以给 j 传输信息,对应
M
v
[
i
]
[
j
]
=
1
M_v[i][j]=1
Mv[i][j]=1。最后用矩阵幂算法进行计算,如果矩阵中存在 0 ,则说明网络不连通。
3.5 能耗和寿命
传感器节点电池不可充电,所以应该在保证覆盖率最大的前提下,尽量降低能量损失,增加网络寿命。
具体用什么样的能量消耗模型由网络使用的路由协议决定,比如在LEACH协议中,方案 I 的能量消耗
E
(
I
)
E(I)
E(I)包括信息通信消耗(数据传输和接收)、数据聚合消耗和激活部署方案 I 中的节点,计算如下:

而能耗也与选择的数据传输模型有关,常用的数据传输模型有自由空间模型、多径衰落模型,这两种模型都取决于发送节点与接收节点的距离。一般情况下,对传输距离 d 和阈值进行比较,d 小于阈值时,使用自由空间模型,否则使用多径衰落模型,传输 l bit数据的能量消耗计算如下: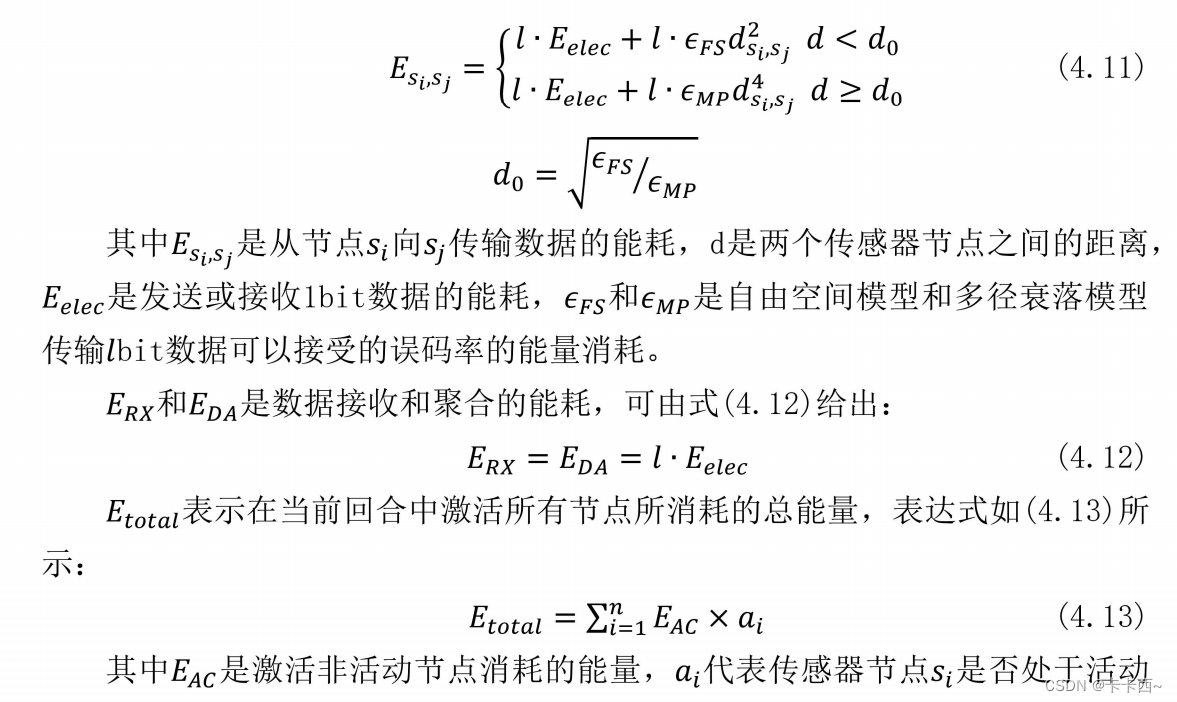

3.6 信息传输数量
在保证覆盖率最大的前提下,传感器节点向簇头传输的数据越多,越能真实反映监测区域的情况,所以应该尽可能传输较多的数据;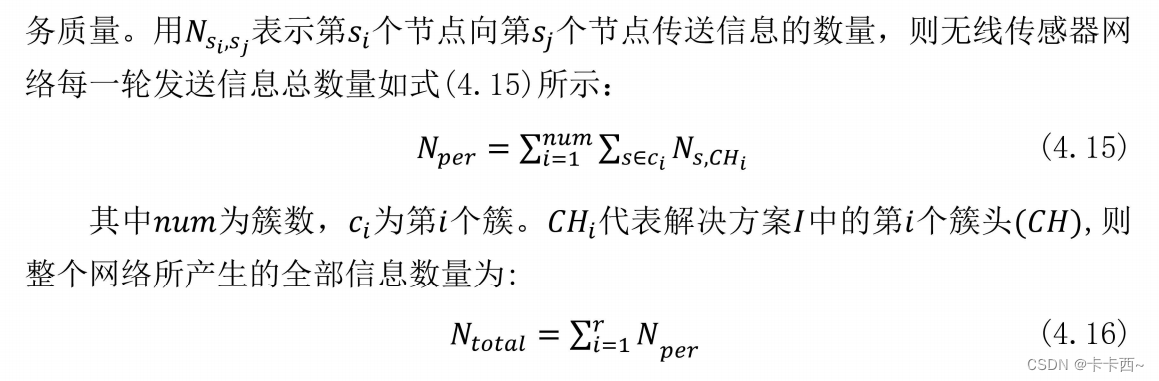
3.7 算法复杂度
越低越好。
二、相关模型
1 传感器节点感知模型
1.1 布尔感知模型(图a)
也叫二元感知模型,是一种理想的感知模型,节点在传输信号时能力不会随着距离增加而降低,适用于节点监测半径较小时,忽略信号在传输过程中的衰减。它在基础理论推导中经常使用,在实际生活中使用较少。
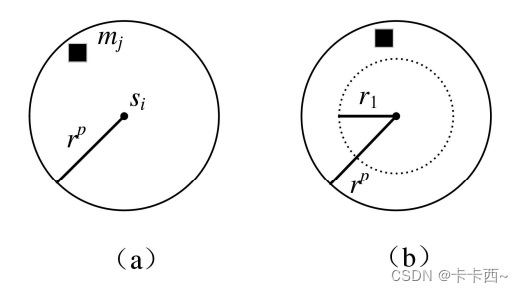
一个传感器节点对一个像素点的感知概率计算:如图(a),圆点
s
i
s_i
si是传感器节点,方块
m
j
m_j
mj是监测目标,
r
p
r^p
rp是
s
i
s_i
si的感知半径,这个圆盘是节点
s
i
s_i
si的感知区域。如果监测目标
m
j
m_j
mj在节点
s
i
s_i
si的感知区域内,则认为
m
j
m_j
mj被
s
i
s_i
si覆盖。(传感器节点的通信半径
r
c
r^c
rc一般大于等于
2
r
p
2r^p
2rp)。
很显然,我们必须计算
m
j
m_j
mj与
s
i
s_i
si之间的距离。两点之间的距离有很多种,如果是欧氏距离,且在二维平面,那么两点之间的距离
d
(
s
i
,
m
j
)
=
(
x
i
−
x
j
)
2
+
(
y
i
−
y
j
)
2
d(s_i,m_j)=\sqrt{(x_i-x_j)^2+(y_i-y_j)^2}
d(si,mj)=(xi−xj)2+(yi−yj)2,如果是三维空间,再加个坐标 z 就好了。
进而得到
m
j
m_j
mj被
s
i
s_i
si感知的概率为:

这个非1即0的概率真的很“布尔”。
所有传感器节点对一个像素点的联合感知概率计算:监测节点
m
j
m_j
mj的联合感知概率
C
p
(
s
a
l
l
,
m
j
)
C_p(s_{all},m_j)
Cp(sall,mj)计算如下:
C
p
(
s
a
l
l
,
m
j
)
=
1
−
∏
i
=
1
N
(
1
−
p
c
o
v
(
s
i
,
m
j
)
)
C_p(s_{all},m_j)=1-\prod_{i=1}^{N}(1-p_{cov}(s_i,m_j))
Cp(sall,mj)=1−i=1∏N(1−pcov(si,mj))
只要有一个
s
i
s_i
si可以感知到
m
j
m_j
mj,
p
c
o
v
(
s
i
,
m
j
)
就为
1
p_{cov}(s_i,m_j)就为1
pcov(si,mj)就为1,那么后面连乘这部分就为0,最后的联合感知概率就为1。
二维平面覆盖率计算:设 N 个同构传感器节点集合
S
=
{
s
1
,
s
2
,
.
.
.
,
s
N
}
S=\{s_1,s_2,...,s_N\}
S={s1,s2,...,sN},K个监测节点集合
M
=
{
m
1
,
m
2
,
.
.
.
,
m
K
}
M=\{m_1,m_2,...,m_K\}
M={m1,m2,...,mK},矩形监测区域面积为
L
×
W
m
2
L×Wm^2
L×Wm2,将监测区域划分成
L
×
W
L×W
L×W个网格,每个网格面积为
1
m
2
1m^2
1m2,监测节点位于网格的中心点,则覆盖面积 = 所有监测点的联合感知概率累加之和,覆盖率为 覆盖面积 / 监测区域面积。
覆盖率
C
r
C_r
Cr计算如下:
C
r
=
∑
j
=
1
K
C
p
(
s
a
l
l
,
m
j
)
L
×
W
C_r=\frac{\sum_{j=1}^{K}C_p(s_{all},m_j)}{L×W}
Cr=L×W∑j=1KCp(sall,mj)
1.2 概率感知模型(图b)
节点在传输信号时能力会随着距离增加而降低,可以较客观反映现实生活中网络部署环境。
一个传感器节点对一个像素点的感知概率计算:如图(b),它在(a)的基础上多了一个半径
r
1
r_1
r1,我们首先也是先计算
m
j
m_j
mj与
s
i
s_i
si之间的距离,进而得到
m
j
m_j
mj被
s
i
s_i
si感知的概率:
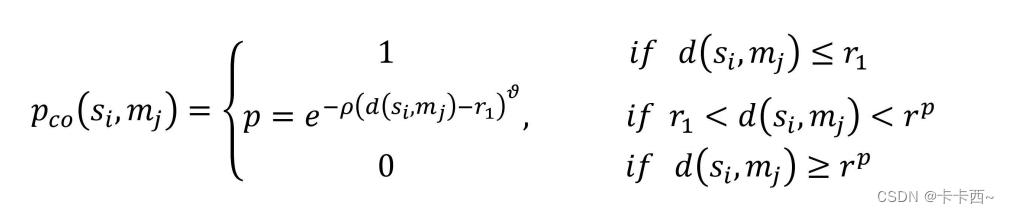
这个很好理解,如果两点间距离小于
r
1
r_1
r1,表示
m
j
m_j
mj肯定可以被
s
i
s_i
si感知;如果两点间距离在
r
1
r_1
r1与
r
p
r^p
rp之间,表示
m
j
m_j
mj有可能被
s
i
s_i
si感知,这个可能性有多大?由第二个子式计算得到。该子式中的参数
ρ
\rho
ρ和
θ
\theta
θ由传感器属性和监测环境决定。
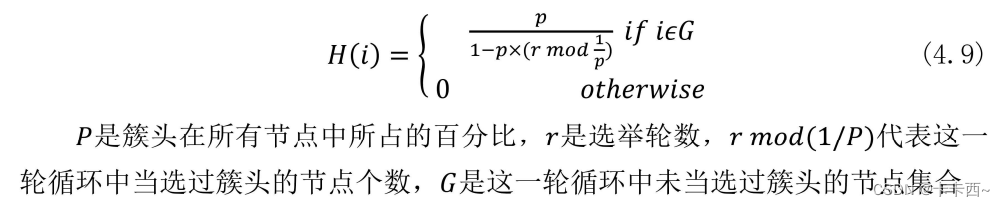
2 簇头选择模型
2.1 江西理工
每个传感器节点被选为簇头的概率为p
c,如果该传感器节点随机生成值小于簇头选举阈值
H
(
i
)
∈
[
0
,
1
]
H(i)\in[0,1]
H(i)∈[0,1],该节点选为当前轮的簇头。
H
(
i
)
H(i)
H(i)计算如下:
3 虚拟力算法


4 三维相关算法
- 曲面面积的计算: 对于三维空间来说,监测区域是曲面。一种简单的计算曲面表面积的方法为:先将曲面映射到二维平面中,然后将平面划分为好多面积相同的小网格,然后用曲面积分公式计算每个小网格对应的小曲面的表面积,最后加起来就得到了整个曲面的表面积。
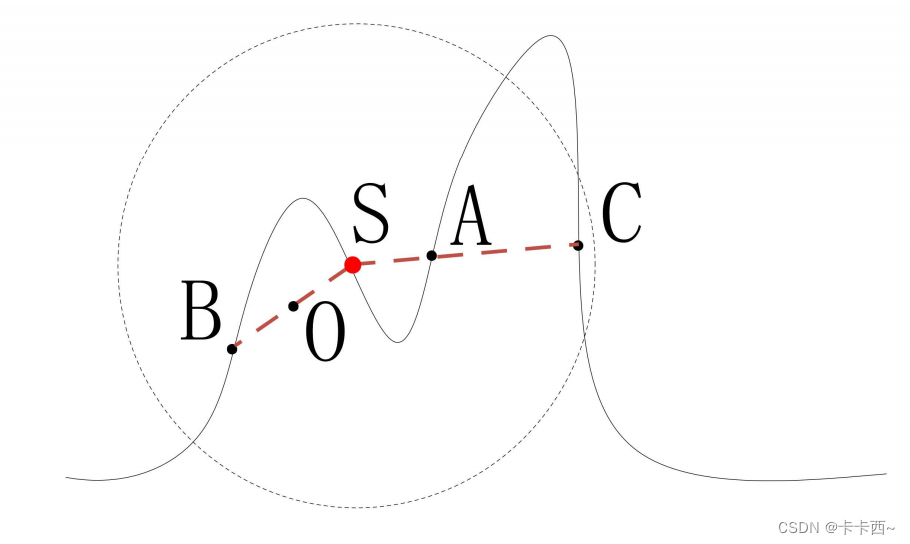
- 三维感知盲区: 在三维空间内,由于障碍物遮挡,有些目标虽然在传感器节点的感知范围内,但也感知不到,比如下图的点 C。 判断两点之间是否存在遮挡,有一种简单的方法为将 SC 连接起来,得到该范围内的曲面方程,然后求零点,如果存在零点,说明存在遮挡。比如点 A 就是一个零点。
版权归原作者 卡卡西~ 所有, 如有侵权,请联系我们删除。