
- 🍨 本文为🔗365天深度学习训练营 中的学习记录博客
- 🍦 参考文章地址: 🔗天气识别 | 第5天_K同学啊的博客-CSDN博客
- 🍖 作者:K同学啊
本文将采用CNN实现多云、下雨、晴、日出四种天气状态的识别。
本文为了增加模型的泛化能力,新增了Dropout层并且将最大池化层调整成了平均池化层。
一、前期工作
1. 设置GPU
如果使用的是CPU可以忽略这步
import tensorflow as tf
gpus = tf.config.list_physical_devices("GPU")
if gpus:
gpu0 = gpus[0] #如果有多个GPU,仅使用第0个GPU
tf.config.experimental.set_memory_growth(gpu0, True) #设置GPU显存用量按需使用
tf.config.set_visible_devices([gpu0],"GPU")
2.导入数据
import matplotlib.pyplot as plt
import os,PIL
# 设置随机种子尽可能使结果可以重现
import numpy as np
np.random.seed(1)
# 设置随机种子尽可能使结果可以重现
import tensorflow as tf
tf.random.set_seed(1)
from tensorflow import keras
from tensorflow.keras import layers,models
import pathlib
data_dir = "./weather_photos/"
data_dir = pathlib.Path(data_dir)
3. 查看数据
数据集一共分为
cloudy
、
rain
、
shine
、
sunrise
四类,存放于
weather_photos
文件夹中以各自名字命名的子文件夹中。
image_count = len(list(data_dir.glob('*/*.jpg')))
print("图片总数为:",image_count) # 1125
roses = list(data_dir.glob('sunrise/*.jpg'))
PIL.Image.open(str(roses[0]))

二、数据预处理
1.加载数据
使用
image_dataset_from_directory
方法将磁盘中的数据加载到
tf.data.Dataset
中
batch_size = 32
img_height = 180
img_width = 180
train_ds = tf.keras.preprocessing.image_dataset_from_directory(
data_dir,
validation_split=0.2,
subset="training",
seed=123,
image_size=(img_height, img_width),
batch_size=batch_size)
Found 1125 files belonging to 4 classes.
Using 900 files for training.
val_ds = tf.keras.preprocessing.image_dataset_from_directory(
data_dir,
validation_split=0.2,
subset="validation",
seed=123,
image_size=(img_height, img_width),
batch_size=batch_size)
Found 1125 files belonging to 4 classes.
Using 225 files for validation.
可以通过class_names输出数据集的标签。标签将按字母顺序对应于目录名称。
class_names = train_ds.class_names
print(class_names)
['cloudy', 'rain', 'shine', 'sunrise']
注:
如果你的目录结构是:
main_directory/
…class_a/
…a_image_1.jpg
…a_image_2.jpg
…class_b/
…b_image_1.jpg
…b_image_2.jpg
然后调用 image_dataset_from_directory(main_directory, labels=‘inferred’) 将返回一个tf.data.Dataset, 该数据集从子目录class_a和class_b生成批次图像,同时生成标签0和1(0对应class_a,1对应class_b),
支持的图像格式:jpeg, png, bmp, gif. 动图被截断到第一帧。
详细介绍可以参考文章:image_dataset_from_directory 简介
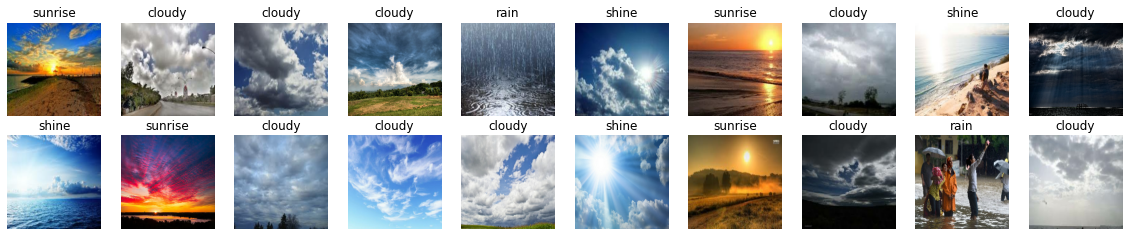
2.可视化数据
plt.figure(figsize=(20, 10))
for images, labels in train_ds.take(1):
for i in range(20):
ax = plt.subplot(5, 10, i + 1)
plt.imshow(images[i].numpy().astype("uint8"))
plt.title(class_names[labels[i]])
plt.axis("off")
3. 再次检查数据
for image_batch, labels_batch in train_ds:
print(image_batch.shape)
print(labels_batch.shape)
break
(32, 180, 180, 3)
(32,)
Image_batch是形状的张量(32,180,180,3)。这是一批形状180x180x3的32张图片(最后一维指的是彩色通道RGB)。Label_batch是形状(32,)的张量,这些标签对应32张图片
4. 配置数据集
- **shuffle()**:打乱数据,详情可以参考:数据集shuffle方法中buffer_size的理解 - 知乎
- **prefetch()**:预取数据,加速运行
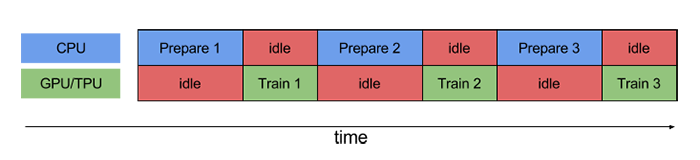
prefetch()
功能详细介绍:CPU 正在准备数据时,加速器处于空闲状态。相反,当加速器正在训练模型时,CPU 处于空闲状态。因此,训练所用的时间是 CPU 预处理时间和加速器训练时间的总和。
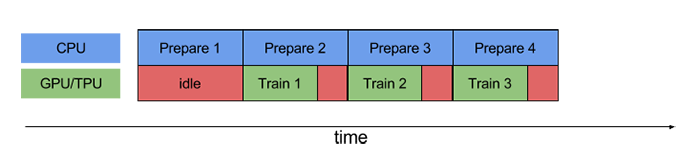
prefetch()
将训练步骤的预处理和模型执行过程重叠到一起。当加速器正在执行第 N 个训练步时,CPU 正在准备第 N+1 步的数据。这样做不仅可以最大限度地缩短训练的单步用时(而不是总用时),而且可以缩短提取和转换数据所需的时间。如果不使用
prefetch()
,CPU 和 GPU/TPU 在大部分时间都处于空闲状态:
使用
prefetch()
可显著减少空闲时间:
- **cache()**:将数据集缓存到内存当中,加速运行
AUTOTUNE = tf.data.AUTOTUNE
train_ds = train_ds.cache().shuffle(1000).prefetch(buffer_size=AUTOTUNE)
val_ds = val_ds.cache().prefetch(buffer_size=AUTOTUNE)
三、构建CNN网络
卷积神经网络(CNN)的输入是张量 (Tensor) 形式的
(image_height, image_width, color_channels)
,包含了图像高度、宽度及颜色信息。不需要输入
batch size
。color_channels 为 (R,G,B) 分别对应 RGB 的三个颜色通道(color channel)。
num_classes = 4
"""
layers.Dropout(0.4) 作用是防止过拟合,提高模型的泛化能力。
在文章花朵识别中,训练准确率与验证准确率相差巨大就是由于模型过拟合导致的
关于Dropout层的更多介绍可以参考文章:https://mtyjkh.blog.csdn.net/article/details/115826689
"""
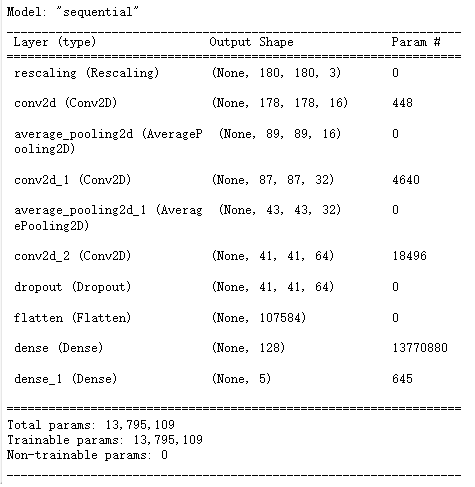
model = models.Sequential([
layers.experimental.preprocessing.Rescaling(1./255, input_shape=(img_height, img_width, 3)),
layers.Conv2D(16, (3, 3), activation='relu', input_shape=(img_height, img_width, 3)), # 卷积层1,卷积核3*3
layers.AveragePooling2D((2, 2)), # 池化层1,2*2采样
layers.Conv2D(32, (3, 3), activation='relu'), # 卷积层2,卷积核3*3
layers.AveragePooling2D((2, 2)), # 池化层2,2*2采样
layers.Conv2D(64, (3, 3), activation='relu'), # 卷积层3,卷积核3*3
layers.Dropout(0.3),
layers.Flatten(), # Flatten层,连接卷积层与全连接层
layers.Dense(128, activation='relu'), # 全连接层,特征进一步提取
layers.Dense(num_classes) # 输出层,输出预期结果
])
model.summary() # 打印网络结构
四、编译
在准备对模型进行训练之前,还需要再对其进行一些设置。以下内容是在模型的编译步骤中添加的:
- 损失函数(loss):用于衡量模型在训练期间的准确率。
- 优化器(optimizer):决定模型如何根据其看到的数据和自身的损失函数进行更新。
- 指标(metrics):用于监控训练和测试步骤。以下示例使用了准确率,即被正确分类的图像的比率。
# 设置优化器
opt = tf.keras.optimizers.Adam(learning_rate=0.001)
model.compile(optimizer=opt,
loss=tf.keras.losses.SparseCategoricalCrossentropy(from_logits=True),
metrics=['accuracy'])
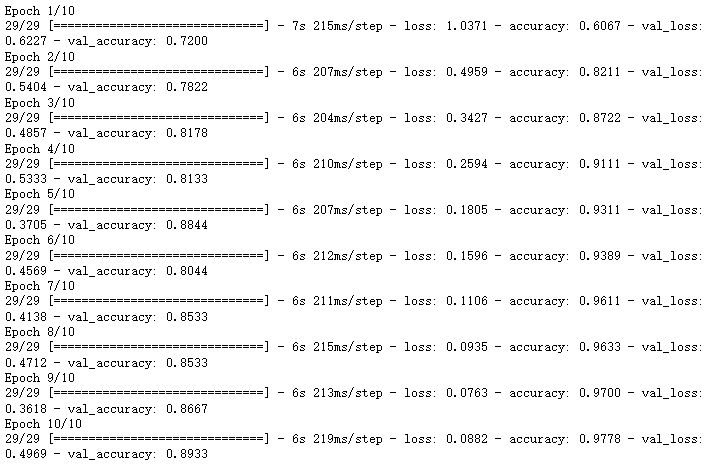
五、训练模型
epochs = 10
history = model.fit(
train_ds,
validation_data=val_ds,
epochs=epochs
)
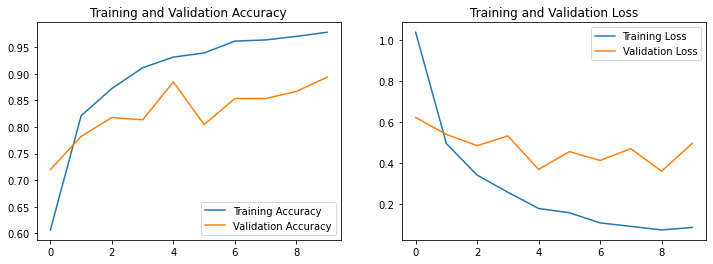
六、模型评估
acc = history.history['accuracy']
val_acc = history.history['val_accuracy']
loss = history.history['loss']
val_loss = history.history['val_loss']
epochs_range = range(epochs)
plt.figure(figsize=(12, 4))
plt.subplot(1, 2, 1)
plt.plot(epochs_range, acc, label='Training Accuracy')
plt.plot(epochs_range, val_acc, label='Validation Accuracy')
plt.legend(loc='lower right')
plt.title('Training and Validation Accuracy')
plt.subplot(1, 2, 2)
plt.plot(epochs_range, loss, label='Training Loss')
plt.plot(epochs_range, val_loss, label='Validation Loss')
plt.legend(loc='upper right')
plt.title('Training and Validation Loss')
plt.show()
思考:1.最大池化与平均池化的区别是什么呢?2.学习率是不是越大越好,优化器该如何设置呢?
版权归原作者 老师我作业忘带了 所有, 如有侵权,请联系我们删除。