
参考
ROS2官网提供完全的安装方法,国内安装可能遇到相关问题,添加密钥可能会出现连接超时问题,下列给出相关方法处理
官方安装步骤Ubuntu (Debian packages) — ROS 2 Documentation: Jazzy documentation
准备工作
1.确定操作系统版本
lsb_release
命令显示了 Linux Standard Base (LSB) 信息和特定的发行版信息。要查看 Ubuntu 版本,你可以运行:
lsb_release -a
这条命令会显示类似于以下的信息:
No LSB modules are available.
Distributor ID: Ubuntu
Description: Ubuntu 24.04.2 LTS
Release: 24.04
Codename: noble
2.选择与操作系统对应的ROS2版本
进入ROS Documentation ROS2官网页面
选择对应的ROS2版本,具体版本区别见ROS官网描述信息
3.安装
参考官网的安装步骤Ubuntu (Debian packages) — ROS 2 Documentation: Rolling documentation
设置语言环境
请确保您有一个支持
UTF-8
.如果您处于最小环境(例如 docker 容器)中,则区域设置可能是最小值,例如
POSIX
.我们使用以下设置进行测试。但是,如果您使用的是不同的 UTF-8 支持的区域设置,这应该没问题。
locale # check for UTF-8
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
locale # verify settings
启用所需的存储库
您需要将 ROS 2 apt 存储库添加到您的系统中。
首先,确保已启用 Ubuntu Universe 存储库。
sudo apt install software-properties-common
sudo add-apt-repository universe
现在使用 apt 添加 ROS 2 GPG 密钥。
sudo apt update && sudo apt install curl -y
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
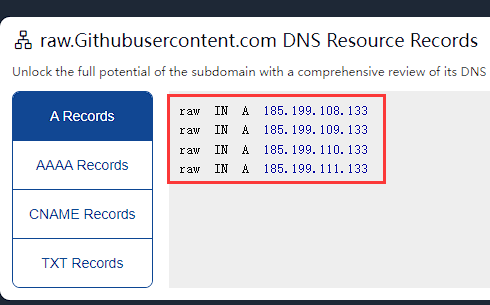
注:raw.githubusercontent.com 添加密钥事时可能出现超时情况,打开网站https://www.ipaddress.com/输入raw.githubusercontent.com进行查询
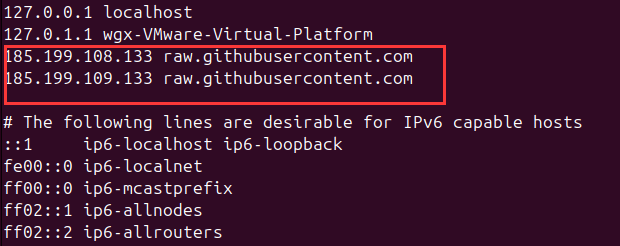
进入Ubuntu命令行 添加本地路由表
sudo vim /etc/hosts
添加后再次运行第二条指令
然后将存储库添加到源列表。
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
安装开发工具(可选)
如果你要构建ROS包或以其他方式进行开发,你也可以安装开发工具。
sudo apt update && sudo apt install ros-dev-tools
安装 ROS 2
设置仓库后,更新 apt 仓库缓存。
sudo apt update
ROS 2 软件包建立在经常更新的 Ubuntu 系统上。始终建议您在安装新软件包之前确保您的系统是最新的。
sudo apt upgrade
1.桌面安装(推荐):ROS、RViz、演示、教程。
sudo apt install ros-rolling-desktop
2.ROS-Base Install(裸):通信库、消息包、命令行工具。没有 GUI 工具。
sudo apt install ros-rolling-ros-base
安装其他 RMW 实现(可选)
The default middleware that ROS 2 uses is
Fast DDS
, but the middleware (RMW) can be replaced at runtime. See the guide on how to work with multiple RMWs.
ROS 2 默认使用的中间件是
Fast DDS
,但中间件 (RMW) 可以在运行时替换。请参阅有关如何使用多个 RMW 的指南。
设置环境
通过获取以下文件来设置您的环境。
# Replace ".bash" with your shell if you're not using bash
# Possible values are: setup.bash, setup.sh, setup.zsh
source /opt/ros/rolling/setup.bash
尝试一些例子
如果您安装了
ros-rolling-desktop
上面,您可以尝试一些示例。
在一个终端中,获取设置文件,然后运行 C++
talker
:
source /opt/ros/rolling/setup.bash
ros2 run demo_nodes_cpp talker
在另一个终端源中,设置文件,然后运行 Python
listener
:
source /opt/ros/rolling/setup.bash
ros2 run demo_nodes_py listener
你应该看到“这是
Publishing
消息”这句话
talker
,
listener
以及说
I heard
那些消息的说法。这将验证 C++ 和 Python API 是否正常工作。万岁!
卸载
如果您需要卸载 ROS 2 或在已从二进制文件安装后切换到基于源代码的安装,请运行以下命令:
sudo apt remove ~nros-rolling-* && sudo apt autoremove
您可能还需要删除存储库:
sudo rm /etc/apt/sources.list.d/ros2.list
sudo apt update
sudo apt autoremove
# Consider upgrading for packages previously shadowed.
sudo apt upgrade
版权归原作者 白水鉴心丶 所有, 如有侵权,请联系我们删除。