
智能算法实现PID智能车控制系统
摘要
PID控制是自动控制领域中产生最早,应用最广的一种控制方法。本文以论述PID参数先进整定方法开始,介绍了近几年得到的最新研究成果。接下来,从PID控制的结构形式实际控制工程需求和实现条件分析了PD控制的独特优点和理论依据。在众多的PID调整方法中,本文选择了内模控制方法进行主要研究根据等效反馈结构,将内模控制方法引入 PID控制器的设计,得到PID参数的明确解析结果。针对典型的工业过程控制对象(一阶和二阶纯滞后过程)根据内模控制原理提出了一种 PID控制器参数整定的新方法针对一类不稳定时滞过程,采用双环控制结构,首先选取P控制器参数,使得广义对象(内环)稳定然后按照内模控制原理设计主控制器,并且针对这些模型提出了一种二自由度PID控制器的设计方法,所设计的控制器有两个可调参,而且被调参数与系统的性能直接相关。可使系统同时具有良好的目标值跟踪特性和干扰抑制特性。仿真实验证明,这些方法不但有良好的鲁棒性,而且调节快速、参数整定方法简单,适合工程应用。最后文章对 PID将来的发展进行了展望。
关键词
内模控制,PID控制;参数整定;二自由度
第一章绪论
1.1智能车概述
智能车由单车智能与车联网组成,是指通过搭载先进传感器、控制器、执行器等装置,融合信息通信、物联网、大数据、云计算、人工智能等新技术,实现车内网、车外网、车际网的智能信息交换、共享,具备信息共享复杂环境感知智能化决策自动化协同控制功能,与智能公路与辅助设施共同组成智能移动空间和应用终端的新一代智能出行系统。
智能车相较于传统车,其核心区别在于具有较为先进的自动驾驶辅助系统、智能座舱系统和车联网系统,最显著的特征是智能化、网联化与共享化。智能车通过其搭载的软硬件逐步由单纯的交通运输工具向智能移动空间转移,从而最终实现“以人为中心”的智能移动空间。
目前“智能车”主要由三大要素组成即智能交互、智能驾驶以及智能服务。
智能驾驶:车辆控制及驾驶功能,包括辅助驾驶、智能安全、车辆智能控制、智能地图
智能交互:需求输入或主动识别,包括语音交互、手势/面部识别及生物特征监测
智能服务:与人、生活相关的服务,包括后市场服务、出行服务、社交及生活服务
智能车的智能驾驶、智能交互及智能服务的实现,在具备智能摄像头、激光雷达及人工智能芯片等先进硬件的基础上,还需具备统筹系统、先进算法以及运行稳定的软件系统。智能车在软件系统的不断更新迭代下使其更加懂用户需求更加智能以及更加安全。当“智能车”搭载的智能硬件逐渐标准化后,“智能车”的核心竞争力则变为其内部搭载的“大脑”(软件系统+芯片)。因此,在快速发展的“智能车”行业,软件起到至关重要的作用,软件对智能车的影响主要体现在自动驾驶、智能交互以及智能服务方面。
1.2智能PID研究现状
(1)神经网络PID控制
充分利用神经网络非线性逼近能力和学习能力,并以多种方式将其应用于PID控制己取得了明显的效果。
单神经元作为构成神经网络的基本单元,具有自学习和自适应的能力,而且结构简单易于计算。单神经元自适应PID控制器的实质为一变系数的比例、积分、微分复合控制器,可在一定程度上解决传统PID控制器不易在线整定参数、难于对一些复杂过程和数慢时变系统进行有效控制的不足。
基于BP神经网络参数自学习的PID控制器中,神经网络根据系统的运行状态调节PID控制器的参数,以达到某种性能指标的最优化,使输出层神经元的输出状态对应于PID控制器的三个可调参数Kp, K‘和Kd,通过神经网络的自身学习,加权系数调整,从而使其稳定在对应于某种最佳控制率下的PID控制器参数。
熨.
(2)模糊PID控制
将模糊控制和PID控制相结合构成模糊PID控制,既具有模糊控制灵活而适应性强的优点,又具有PID控制精度高的优点,可使复杂控制系统和高精度的伺服系统具有良好的控制效果,也是近年来十分热门的研究课题。这种复合控制器具有多种构成形式,如引入积分囚子的模糊控制器,Fuzzy-PID开关切换控制器,在线实时模糊自整定PID控制器等。
模糊PID控制对于非线性和时变性的被控对象可获得比较满意的控制效果。可以预见,在非线性系统、需要以人的直觉和调整才能控制的复杂系统、需要有克服周围过程条件变化的适应能力的系统的控制中,模糊PID控制将具有广泛的应用价值。
(3)PID控制器的自整定
尽管PID控制广泛应用于工业过程,但由于过程的非线性、时变及不确定囚素,以一组固定的控制器参数,很难获得满意的控制效果。囚此采用PID的工业控制系统总是受产品质量、安全、产量和能源浪费等问题的困扰。PID参数自整定就是为了处理PID参数整定这个问题而产生的。现在,自动整定或自身整定的PID控制器己是商业单回路控制器和分散控制系统的一个标推。
如果自整定要以模型为基础,为了PID参数的重新整定在线寻找和保持好过程模型是较难的。闭环工作时,要求在过程中插入一个测试信号。这个方法会引起扰动,所以基于模型PID参数自整定在工业应用不是太好。
如果自整定是基于控制率的,经常难以把由负载干扰引起的影响和过程动态特性变化引起的影响区分开来,囚此受到干扰的影响控制器会产生超调,产生一个不必要的自适应转换。另外,由于基于控制率的系统没有成热的稳定性分析方法,参数整定可靠与否存在很多问题。
囚此许多自身整定参数PID控制器经常工作在自动整定模式而不是连续的自身整定模式。自动整定通常是指根据开环状态确定的简单过程模型自动计算PID参数,其过程包括三个部分:过程扰动的产生、扰动响应的评估及控制器参数的计算。这同经验丰富的操作人员在手动整定PID控制器时使用的步骤是一样的。过程必须以某种方式产生扰动,如给过程对象输入阶跃、脉冲或正弦信号,以便确定过程的动态特性。
在工业生产过程中常会遇到具有大纯滞后的过程,例如造纸生产过程,化学反应器和精馏塔中都存在大纯滞后问题。这类过程被公认为较难控制的过程。如果采用PID控制,则参数整定通常采用Ziegler-Nichols整定规则。这种方法的优点是只需要很少的过程对象的先验知识,但它的缺点是控制效果较差,尤其是对于大滞后的过程,系统很难工作在令人满意的状态。另外的一些整定方法,如改进的Ziegler-Nichols规则、Cohen-Coon法、误差积分最优法(ISE, IAE和ITAE,也都不适用于大纯滞后过程,往往给出较差的甚至不稳定的性能。
随着计算机技术和控制理论的发展,PID控制的功能将越来越完善,应用也将越来越广泛。
1.3本文工作
本文综述了内模PID(Internal Model Control-PID, IMC-PID)控制的研究现状,并将IMC-PID控制分别与模糊逻辑和神经网络相结合,提出了几种新的IMC-PID控制算法。
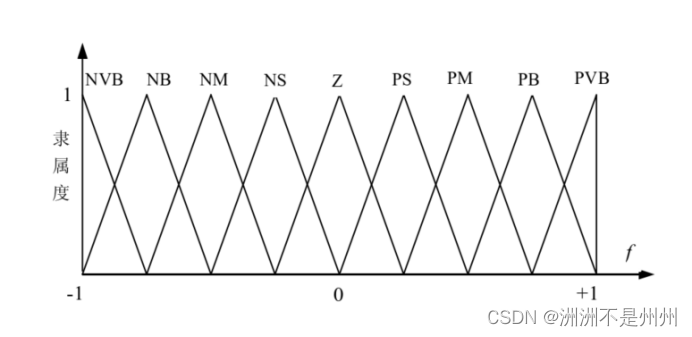
首先,针对过程控制中的典型控制对象,提出了一种具有设定值加权的IMC-PID控制器设计方法。该方法通过模糊系统的输出在线修正IMC-PID控制器比例作用部分的设定值加权系数,使得系统的目标值跟踪特性和干扰抑制特性均得到明显的改善,而且控制算法简单、参数调整方便。
其次,将神经网络和IMC-PID控制方法相结合,提出了基于神经网络的自适应IMC-PID控制方法。通过神经网络的自学习功能在线调整IMC-PID控制器参数,改善了控制对象参数变化对系统性能的影响,增强了系统的鲁棒性和自适应能力。
最后,针对一阶时延不稳定过程(FODUP) ,提出了基于模糊增益调度的
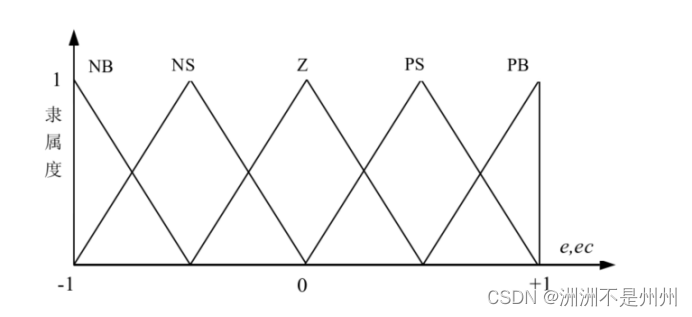
IMC-PID(FGS-IMC-PID)控制方法。该方法以控制系统的误差及误差变化率作为模糊控制器的输入,由模糊控制器的输出在线调整IMC-PID控制器参数。克服了常规IMC-PID控制器参数整定时,需要在目标值跟踪特性和干扰抑制特性之间进行折中的不足,改善了控制系统的性能。
第二章 PID控制简介
PID调节器及其改进型是在工业控制中最常见的控制器「i-z}。PID控制中一个关键的问题便是P}对参数的整定,使P}控制系统达到所期望的控制性能「3]。但是在实际的应用中,许多被控过程机理复杂,具有高度非线性、时变不确定性和纯滞后等特点,特别是在噪声、负载扰动等因素的影响下,过程参数甚至模型结构均会随时间和工作环境的变化而变化。DES-BOROUGH和M IL,LER在2002年的一次统计报告中指出,目前在美国有超过11 600个具有P}控制器结构
的调节器广泛应用于工业控制领域中,有超过970 0的反馈回路采用了P}控制算法,甚至在一些复杂的控制律中,其基本控制层采用的仍然是P}控制算法「s}。然而,只有近1启的P}控制器在实际应用过程中取得了令人满意的控制效果,有2 /3的P}控制系统的控制性能达不到用户所期望的要求。这给控制理论研究和应用带来了前所未有的机遇和挑战。
第三章 内模PID简介
内模控制(Internal Model Control,简称IMC)是一种基于过程数学模型进行控制器设计的新型控制策略。由于其设计简单、控制性能好和在系统分析方面的优越性,囚而内模控制不仅是一种实用的先进控制算法,而且是研究预测控制等基于模型控制策略的重要理论基础。
PID(比例一积分一微分)控制器作为最早实用化的控制器己有50多年历史,现在仍然是应用最广泛的工业控制器。PID控制器具有简单易懂,使用中不需精确的系统模型等优点。
将内模控制和PID控制相结合形成一种新的控制方法一内模PID控制(IMC-PID ) ,其结合二者的优点,为过程控制提供了一种新的思路和方法。其即可以得到明确的解析结果,降低参数设计的复杂性和随机性,简化通常整定中的试凑过程,又可以方便地考虑到系统的鲁棒性要求,可在一定程度上逼近内模控制器的控制效果。
3.1 内模PID控制
1982年,Garcia和Morari撰文提出了内模控制,它包括三部分:
(1)内部模型。用于预测操作变量对输出的影响。
(2)滤波器。使系统达到一定的鲁棒性。
(3)控制算法。计算操作变量的未来值,保证输出跟踪给定值。
以上结构使得内模控制具有以下优点
(1)当系统存在输出约束时,基于模型的预测输出值,可以预见任何超出约束值的输出,从而采取适当的纠正动作。
(2)引入滤波器使得输出跟踪参考轨迹。这赋予了滤波器以物理意义,并且使操作员可以在线对它进行调节。
(3)通过设计滤波器和控制模块能够分别调节系统的鲁棒性和响应性能,而在其他的设计方法中这两种调节总是不可分割地纠缠在一起。
自Garcia和Morari之后,各国学者相继做了一系列研究,将IMC推广到多输入多输出系统(MIMO)}4’ s}、非线性系统[6.7〕、多回路系统咚’9〕等。文献}1]中,作者设计了单输入单输出(SISO)离散系统的内模控制器,研究了内模控制与其他控制算法(最优控制、史密斯预估器、推断控制、模型算法控制、动态矩阵控制)的关系,最后得出内模控制能够以一种直接的方式调节控制质量和鲁棒性,这种清晰和直观的优点对工业应用很有吸引力。但是,文中没有提及如何设计一个滤波器以补偿模型和对象的偏差,只是说明足够大的滤波器常数能够保证一定的鲁棒性以及要提高控制质量可以采用更复杂的滤波器。文献yom2}介绍了如何设计及改进滤波器常数来保证一定的鲁棒性及提高控制质阵习里。
当前内模控制的发展方向是与各种控制方法互相渗透、取长补短,组合成综合控制策略,许多学者将预测控制、自适应控制、鲁棒控制、模糊控制和神经网络控制等与内模控制结合起来以期更好的发挥内模控制的优势。
第四章内模智能PID智能车控制系统设计
4.1 系统设计
内模控制只有一个整定参数,参数调节和系统动态品质及鲁棒性有着明确的关系,所以具有结构简单、在线调节容易等优点,尤其是对于大时滞系统,可显著改善其鲁棒性和抗扰性。
Rivera等[37]提出一种基于内模控制的PID控制器,该控制器的设计是基于一个假设的过程模型和一个用于鲁棒特性的低通滤波器。采用直接的二步IMC控制器设计方法,以获得一个具有传统PID结构的控制器。
IMC-PID控制器只有一个调节参数,即滤波器常数。这使得IMC-PID控制器的在线整定十分容易。Rivera等采用兼顾ISE值和M值的方法整定滤波器常数。ISE值(平方误差积分值)用来表征系统的控制性能,ISE值越小,系统控制性能越好;而M是互补灵敏度函数的模在频域的最大值,用来表征鲁棒性,M值越小,鲁棒性越好。与相角稳定和幅值稳定裕度相比,M值求取方便,而且表征的是频域下模型不确定时的鲁棒性,囚而被广泛认为更合适于表征鲁棒性。用这样的整定方法,Rivera等对一阶加纯滞后系统中的
IMC-PID和IMC-PI控制器进行了整定,得到了较满意的结果。
在构造带纯滞后系统的IMC-PID控制器的过程中,一个无法避免的问题是对纯滞后的近似问题。采用不同的近似手段,就会产生不同的IMC-PID控制器。Rivera等使用了零阶和一阶Pade近似,当纯滞后时间较大时,一阶Pade近似会带来较大误差。囚此,龚晓峰等建议采用非对称二阶近似,给出了这种情况下一阶加纯滞后系统IMC-PID控制器的构造式,和相应的滤波器常数整定方法口8〕o Lee等C9’54]提出用麦克劳林级数对纯滞后项进行展开,得到与Rivera提出的方法所不同的IMC-PID控制器,并针对不稳定过程对象提出基于内模的PID整定方法,仿真结果显示该方法取得了良好的控制效果。
4.2内模控制原理
1982年,Garcia和Morari} 1〕完整地提出并发展了图2-1的控制结构,并将该控制策略定名为内模控制。图2-1中虚线框内部分可用模拟硬件或计算机软件来实现,由于该结构中除了有控制器GIM。以外,还包含了过程模型乓,内模控制囚此得名。这里G:表示对象的传递函数,云:表示对象模型(即内部模型)。GIMC代表内模控制器。控制目标是保持y逼近参考值(设定值):。G、表示扰动对输出的影响。为求取图中输入:和y与过程输出之间的传递函数,可以先将图2-1等价变换为图2-2所示的简单反馈控制形式。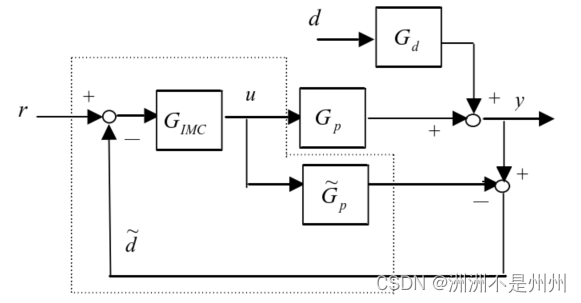
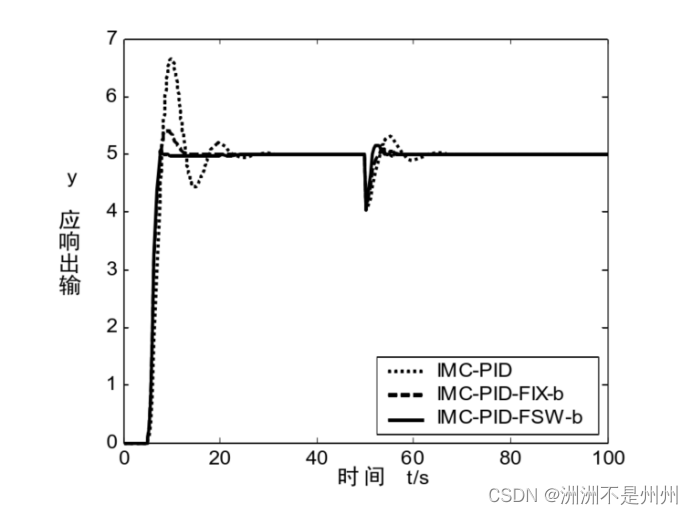
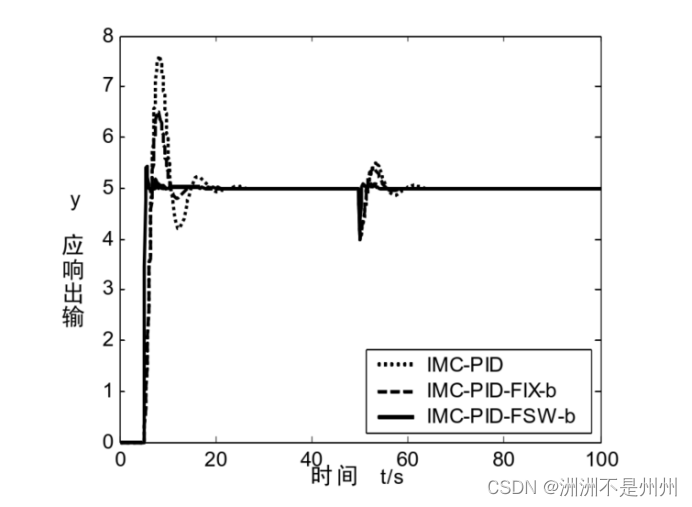
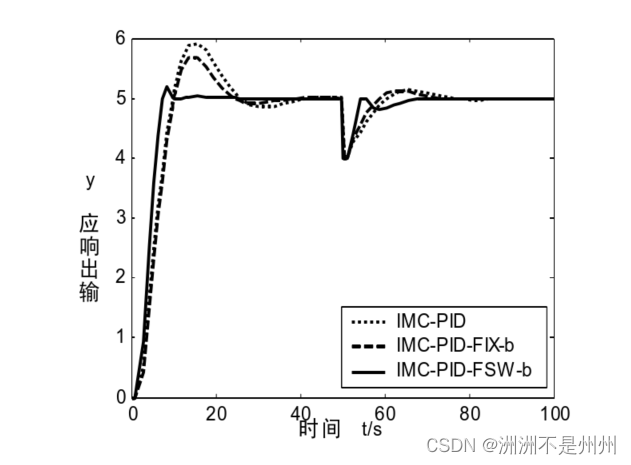
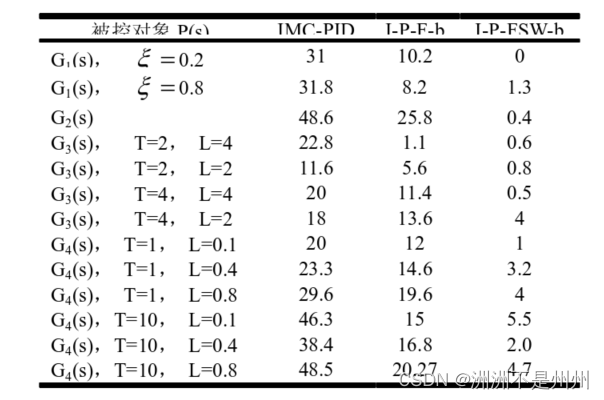
内模控制是一种设计简单、跟踪调节性能好、鲁棒性强、能消除不可测干扰的先进控制方法。在控制系统的设计过程中,目标值跟踪特性和干扰抑制特性是主要关注的两个问题[ss] o IMC能兼顾控制系统的目标值跟踪特性和干扰抑制特性,且只需整定一个参数。IMC-PID控制器不仅具有IMC控制器的优点,而且它可以得到明确的解析结果,降低PID控制器参数设计的复杂性和随机性。常规的IMC-PID调节器也只有一个可调参数兄,参数整定时也要在系统的目标值跟踪特性和干扰抑制特性之间进行折中选择。这样做一般能满足大多数控制系统的要求,但对于高性能的控制系统则有一定的局限性,难以获得满意的控制效果。当调节兄使系统取得好的抗扰性能时,系统跟随性能变坏,而当系统跟随性能比较好时,系统难以取得好的抗扰性能[[s6]。囚此研究能使系统同时具有良好的目标值跟踪特性、干扰抑制特性和鲁棒性的新的IMC-PID控制器设计方法具有重要的实际意义。
第五章 系统仿真及结果分析
5.1 系统仿真分析
PID控制是一种应用历史悠久、工业界比较熟悉的简单控制算法。由于它有效地模仿了人工控制方式,囚此能满足一般工业过程的平稳操作和安全运行的要求。Rivera等人首先将内模控制的思想引入PID控制器设计,并建立了滤波器参数与PID控制器参数的关系。在Rivera等人工作的基础上,Morari和Zafiriou, Chien和Fruehauf等进一步完善了基于内模原理的PID控制器参数整定方法。
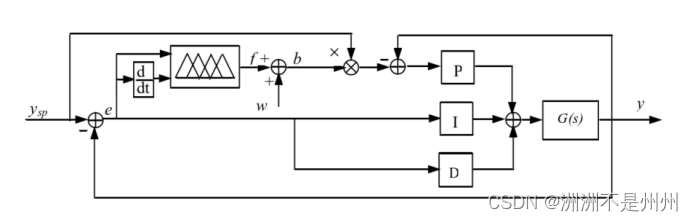
充分利用模糊控制不依赖于受控对象精确数学模型的优点,将模糊控制和PID控制两者结合起来,扬长避短,既具有模糊控制灵活而适应性强的优点,又具有PID控制精度高的特点[[s7, ss]。本章从内模控制原理出发,提出了一种具有模糊逻辑设定值加权的内模PID控制方法。所提出的控制器结构简单、参数调整方便,系统的动态性能与控制器参数直接相关,通过两个可调参数的调整,可以使系统同时具有良好的目标值跟踪特性、干扰抑制特性和鲁棒性,克服了常规IMC-PID控制的不足,理论分析和仿真实验研究证明了它的有效性。
5.2 控制效果截图
参考文献
【1]Garcia C E, Morari M. Internal Model Control. I .A Unifying Review and Some New Results. Ind Eng Chem Process Des Dev, 1982,21(2):308
[2]赵耀.内模控制发展综述[J].信息与控制,2000,29(6): 526-531
[3]周涌,陈庆伟,胡维礼.内模控制研究的新发展[[J].控制理论与应用.2004,21(3)475-482
[4] Garcia C E, Morari M. Internal Model Control. 2. Design Procedure for Multivariable. Ind Eng Chem Process Des Dev,1985,24(2):472-484
[5] Garcia C E, Morari M. Internal Model Control. 3.Multivariable Control Law Computa-tion and Tuning Guidelines. Ind Eng Chem Process Des Dev, 1985, 24(2):485一494
[6] Garcia C E, Morari M. Internal Model Control. 5. Extention to Nonlinear Systems. Ind Eng Chem Process Des Dev, 1986,25(2):403-411
[7] HENSON M A, SEBORG D E. An internal model control strategy for nonlinear systems[J].America Institute of Chemical EngineeringJournal, 1991,37(7):1065一1081
[8] Garcia C E, Morari M. Internal Model Control. 6. Multiloop design. Ind Eng Chem Process Des Dev, 1986, 25(2):411-419
[9] Lee, Y. Lee, M. Park, S. PID controller tuning to obtain desired closed loop responses for cascade control systems. Ind. Eng.Chem. Res. 1998, 37, 7 (5), 1859
[10]张井岗,李临生.一种二自由度内模控制方法[[J].工业仪表与自动化装置.2002, 4,63一65
【11]Jose Alvarez-Ramirez, Rosendo Monroy-Loperena, Alejandra Velasco, and Rafael Urrea.Optimality of Internal Model Control Tuning Rules. Ind. Eng. Chem. Res. 2004, 43,7951一7958
【12] Ian G. Horn, Jeffery R. Arulandu, Christopher J. Gombas, Jeremy G. VanAntwerp, and Richard D. Braatz*.Improved Filter Design in Internal Model Control. Industrial& Engineering Chemistry Research.1996, 35, 3437一3441
[13]华建兴,席裕庚.带预估控制量二次约束的无静差FIR型内模控制器【J].控制理论与应用,1999,16(4):492-495
[14]席裕庚.预测控制[M].北京:国防工业出版社,1993
[1习陈悦,安燮南,高东杰.内模统一预测控制的进一步分析[J].自动化学报,1999, 25(4): 441-44 8
【16] DATTA A, OCHOA J. Adaptive internal model control design and stability analysis[J].Automatica,1996,32(2):261-266
[17] DATTA A, OCHOA J. Adaptive internal model control:HZ optimization for stable plants [J]. Automatica,1998,34(1):75一82
[18] DATTA A, OCHOA J. Adaptive internal model control:H} optimization for stable plants [J]. IEEE Trans on Automatic Control, 1999,44(11):2130-2134
【19] RING L, DATTA A. Decentralized adaptive internal model control for multi一inputmulti-output system[C].Proc of American Control Conference. San Diego:ACCC,1999,39-46
[20] SILVA, DATTA A. Adaptive internal model control:The discrete-time case [J].Int J of Adaptive Control Signal Process, 2001,15(1):15一36
[21 ]张井岗等.模型参考自适应内模控制及其仿真研究[[J].系统仿真学报,1997, 9(2)38-43
版权归原作者 洲洲不是州州 所有, 如有侵权,请联系我们删除。