
本文编辑:调皮哥的小助理

FMCW毫米波雷达系统的性能参数主要包含:
(1)距离估计、距离分辨率、距离精度、最大探测距离;
(2)速度估计、速度分辨率、速度精度、最大不模糊速度;
(3)角度估计、角度分辨率、角度精度、最大角度范围。
分析以及理解上述这些参数有助于我们学习雷达和设计雷达。
一、距离维度
1.距离估计
对中频信号进行 ADC 采样, 然后做 FFT 提取信号的频率信息, 假设 FFT 得到频谱的谱峰值对应的频率为fm , 则目标的距离信息可以表示如下:
R
=
c
T
f
m
2
B
R=\frac{c T f_m}{2 B}
R=2BcTfm
该公式的推导过程已经在之前进行过详细的论述,如果还有不清楚的可以查看下列文章:https://zhuanlan.zhihu.com/p/422798513
2.距离分辨率
距离分辨率表示距离上分辨两个目标的能力,用如下公式表示:
Δ
R
=
c
2
B
\Delta R=\frac{c}{2 B}
ΔR=2Bc
该公式的推导过程也在之前的文章中详细论述过:https://zhuanlan.zhihu.com/p/510398532,
3.距离精度
测距精度表示测量单目标的距离测量精度,由信噪比和有效带宽决定,用如下公式表示:
σ
R
=
c
3.6
B
2
S
N
R
\sigma_R=\frac{c}{3.6 B \sqrt{2 S N R}}
σR=3.6B2SNRc
这里的信噪比是距离FFT的信噪比,如果我们带入距离分辨率ΔR,那么上述公式可以写为:
σ
R
=
Δ
R
1.8
2
S
N
R
\sigma_R=\frac{\Delta R}{1.8 \sqrt{2 S N R}}
σR=1.82SNRΔR
这样我们也可以说距离精度与距离分辨率和信噪比有关,距离分辨率越小,距离精度值也越小,信噪比越高,距离精度值越小。
关于测距精度的公式推导可以见这两篇论文:
(1)https://ieeexplore.ieee.org/stamp/stamp.jsp?
(2)https://www.mers.byu.edu
4.最大探测距离
雷达最大探测距离,也可以叫做雷达威力。雷达的最大探测距离通常采用基于弗里斯方程的雷达方程来计算,这部分工作通常也叫做雷达链路预算,FMCW雷达的雷达方程如下所示:
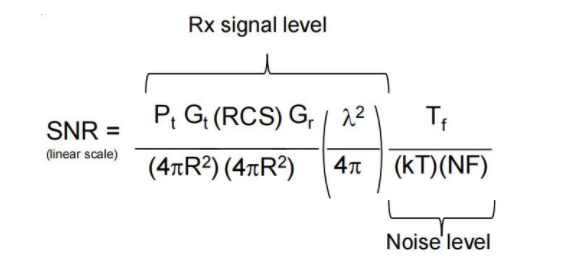
其中,Tf是一帧内Chirp的总时间,如果帧占空比为100%,则Tf等于帧周期,否则Tf般要小于帧周期。Pt是发射功率,Gt是发射天线增益,Gr是接收天线增益。
雷达的最大探测距离还有另外一种计算方法,我习惯称雷达方程为雷达探测距离的决定式,因为只有满足雷达方程,后续的计算和处理才有意义。这种方式的雷达最大探测距离取决于最大的中频信号带宽IFmax,表示如下:
I
F
max
=
S
∗
τ
=
2
S
∗
R
max
c
I F_{\max }=S * \tau=\frac{2 S * R_{\max }}{c}
IFmax=S∗τ=c2S∗Rmax
R
max
=
c
∗
I
F
max
2
S
R_{\max }=\frac{c * I F_{\max }}{2 S}
Rmax=2Sc∗IFmax
其中,S是调频斜率。最大中频信号的带宽大小与ADC采样率相关,在TI毫米波雷达DCA1000数据采集平台上具备两种模式,如下所示:
(1)在complex 1x模式下:
I
F
max
≤
0.9
∗
f
s
I F_{\max } \leq 0.9 * f_s
IFmax≤0.9∗fs
(2)在complex 2x和实采样模式下:
I
F
max
≤
0.9
∗
f
s
2
I F_{\max } \leq \frac{0.9 * f_s}{2}
IFmax≤20.9∗fs
因此,也可以用下式来估计最大作用距离,意味着雷达最大探测距离取决于中频信号的采样率:
R
max
=
f
s
∗
c
2
S
R_{\max }=\frac{f_s * c}{2 S}
Rmax=2Sfs∗c
我们也可以采用下面的过程来证明这个实事,也就是说ADC的采样率应该尽可能高,这样对于提升雷达的性能有帮助。
min
{
Δ
R
R
max
}
=
min
{
c
2
B
∗
2
S
f
s
∗
c
}
=
min
{
1
f
s
∗
T
c
}
\min \left\{\frac{\Delta R}{R_{\max }}\right\}=\min \left\{\frac{c}{2 B} * \frac{2 S}{f_s *_c}\right\}=\min \left\{\frac{1}{f_s * T_c}\right\}
min{RmaxΔR}=min{2Bc∗fs∗c2S}=min{fs∗Tc1}
二、速度维度
1.速度估计
雷达速度估计的公式如下所示:
v
=
λ
Δ
ϕ
4
π
T
c
v=\frac{\lambda \Delta \phi}{4 \pi T_{\mathrm{c}}}
v=4πTcλΔϕ
具体的推导过程见文章:https://zhuanlan.zhihu.com/p/422798513
2.速度分辨率
速度分辨率表示速度维区分两个同一位置的目标的能力。假设一帧传输 N 个Chirp,速度维频率分辨率为:
Δ
v
=
λ
2
N
T
c
\Delta v=\frac{\lambda}{2 N T_c}
Δv=2NTcλ
3.速度精度
测速精度表示测量单目标的速度测量精度,取决于信噪比,同样也可以和上述距离精度分析那样带入速度分辨率公式,该过程读者可以自行推导。
σ
v
=
λ
3.6
N
T
c
S
N
R
\sigma_v=\frac{\lambda}{3.6 N T_c \sqrt{S N R}}
σv=3.6NTcSNRλ
4.最大不模糊速度
目标速度是通过提取chirp之间的相位差(多普勒频率)来计算。连续chirp之间的相位差的相位差可表示为:
Δ
ϕ
=
2
π
f
c
Δ
τ
=
2
π
f
c
2
Δ
R
c
=
2
π
f
c
2
v
T
c
c
=
4
π
v
T
c
λ
\Delta \phi=2 \pi f_c \Delta \tau=2 \pi f_c \frac{2 \Delta R}{c}=2 \pi f_c \frac{2 v T_c}{c}=\frac{4 \pi v T_c}{\lambda}
Δϕ=2πfcΔτ=2πfcc2ΔR=2πfcc2vTc=λ4πvTc
当相位测量不模糊时:
∣
Δ
ϕ
∣
<
π
|\Delta \phi|<\pi
∣Δϕ∣<π
带入上述公式,得到最大不模糊速度为:
v
max
=
λ
4
T
c
v_{\max }=\frac{\lambda}{4 T_c}
vmax=4Tcλ
三、角度维度
1.角度估计
相邻天线的波程差 取决于到达角 :
Δ
=
d
sin
(
θ
)
\Delta=d \sin (\theta)
Δ=dsin(θ)
波程差导致相邻天线之间的相位变化 :
W
=
2
π
λ
d
sin
(
θ
)
W=\frac{2 \pi}{\lambda} d \sin (\theta)
W=λ2πdsin(θ)
该相位变化可以使用三维FFT估计,一旦 被估计,到达角 就可以很容易地求出:
θ
e
s
t
=
sin
−
1
(
w
e
s
t
λ
2
π
d
)
\theta_{\mathrm{est}}=\sin ^{-1}\left(\frac{w_{e s t} \lambda}{2 \pi d}\right)
θest=sin−1(2πdwestλ)
2.角度分辨率
角度分辨率表示在角度维分离相同距离、速度目标的能力。雷达的角度分辨率一般较低,TI单芯片毫米波雷达AWR1xxx系列1T4R的角度分辨率28°左右。在实际情况下,由于距离、速度分辨率较高,目标一般可以在距离和速度维区分开。
假设接收天线个数为NRx,角度维频率分辨率为:
Δ
θ
=
2
π
N
R
X
\Delta \theta=\frac{2 \pi}{N_{R X}}
Δθ=NRX2π
Δ
ω
=
2
π
d
λ
[
sin
(
θ
+
Δ
θ
)
−
sin
θ
]
=
2
π
d
λ
cos
θ
Δ
θ
>
2
π
N
R
X
\Delta \omega=\frac{2 \pi d}{\lambda}[\sin (\theta+\Delta \theta)-\sin \theta]=\frac{2 \pi d}{\lambda} \cos \theta \Delta \theta>\frac{2 \pi}{N_{R X}}
Δω=λ2πd[sin(θ+Δθ)−sinθ]=λ2πdcosθΔθ>NRX2π
Δ
θ
=
λ
N
R
X
d
cos
θ
\Delta \theta=\frac{\lambda}{N_{R X} d \cos \theta}
Δθ=NRXdcosθλ
由上述公式可知,角度分辨率随着目标偏离法线的角度增大而增大,在法线位置目标的角度分辨率值最小。
3.角度精度
测角精度表示测量单目标的角度测量精度,取决于信噪比和3dB波束宽度:
σ
θ
=
θ
3
d
B
1.6
2
S
N
R
\sigma_\theta=\frac{\theta_{3 d B}}{1.6 \sqrt{2 S N R}}
σθ=1.62SNRθ3dB
4.最大探测角度
角度通过RX天线间的接收信号相位差(由波程差引起)来计算,相位差为:
ω
=
2
π
d
sin
θ
λ
\omega=\frac{2 \pi d \sin \theta}{\lambda}
ω=λ2πdsinθ
当相位差不模糊时,即:
∣
ω
∣
<
π
|\omega|<\pi
∣ω∣<π
得到测角范围为:
θ
max
=
sin
−
1
(
λ
2
d
)
\theta_{\max }=\sin ^{-1}\left(\frac{\lambda}{2 d}\right)
θmax=sin−1(2dλ)
上述公式计算可能会得到±90°,但是在实际工程中,角度探测范围还跟天线的波束宽度有关系,一般选择-3dB或者-6dB,所以水平角度范围一般是120°~160°。
版权归原作者 调皮连续波(rsp_tiaopige) 所有, 如有侵权,请联系我们删除。