
VisDrone+YOLOv7结果
YOLOv7
训练
- 命令
python -m torch.distributed.launch --nproc_per_node 4 --master_port 9527 train.py --workers 4 --device 0,1,2,3 --sync-bn --batch-size 32 --data data/VisDrone.yaml --img 640 640 --cfg cfg/training/yolov7.yaml --name yolov7_ --hyp data/hyp.scratch.p5.yaml
分辨率:
640*640
结果输出所在文件夹:
yolov7_
epoch数量:设置的300 最终跑了140左右
验证集
- 命令:
python test.py --data data/VisDrone.yaml --img 640 --batch 32 --device 0,1 --weights /disk2/lxs/yolov7/runs/train/yolov7_/weights/best.pt --name yolov7_val --task val
- 结果
val: Scanning 'datasets/VisDrone/val_list.cache' images and labels... 548 found, 0 missing, 0 empty, 0 corrupted: 100%|███████████████████████████████████████| 548/548 [00:00<?, ?it/s]
Class Images Labels P R [email protected] [email protected]:.95: 100%|█████████████████████████████████████████████████████| 18/18 [00:18<00:00, 1.02s/it]
all 548 38759 0.596 0.496 0.496 0.285
pedestrian 548 8844 0.654 0.543 0.577 0.265
people 548 5125 0.587 0.512 0.494 0.193
bicycle 548 1287 0.448 0.267 0.26 0.11
car 548 14064 0.782 0.839 0.851 0.588
van 548 1975 0.615 0.497 0.503 0.348
truck 548 750 0.631 0.455 0.469 0.307
tricycle 548 1045 0.504 0.416 0.385 0.214
awning-tricycle 548 532 0.362 0.199 0.194 0.12
bus 548 251 0.784 0.602 0.629 0.436
motor 548 4886 0.593 0.635 0.596 0.27
Speed: 7.8/2.0/9.8 ms inference/NMS/total per 640x640 image at batch-size 32
Results saved to runs/test/yolov7_val
测试集
- 命令:
python test.py --data data/VisDrone.yaml --img 640 --batch 32 --device 0,1 --weights /disk2/lxs/yolov7/runs/train/yolov7_/weights/best.pt --name yolov7_test --task test
- 结果
test: Scanning 'datasets/VisDrone/test_list.cache' images and labels... 1610 found, 0 missing, 0 empty, 0 corrupted: 100%|██████████████████████████████████| 1610/1610 [00:00<?, ?it/s]
Class Images Labels P R [email protected] [email protected]:.95: 100%|█████████████████████████████████████████████████████| 51/51 [00:37<00:00, 1.34it/s]
all 1610 75102 0.534 0.435 0.411 0.23
pedestrian 1610 21006 0.559 0.388 0.382 0.15
people 1610 6376 0.544 0.291 0.276 0.0936
bicycle 1610 1302 0.371 0.198 0.171 0.0706
car 1610 28074 0.744 0.798 0.791 0.495
van 1610 5771 0.526 0.45 0.439 0.289
truck 1610 2659 0.565 0.524 0.524 0.332
tricycle 1610 530 0.335 0.374 0.253 0.135
awning-tricycle 1610 599 0.423 0.27 0.235 0.136
bus 1610 2940 0.754 0.585 0.633 0.441
motor 1610 5845 0.518 0.467 0.407 0.158
Speed: 7.8/1.2/9.0 ms inference/NMS/total per 640x640 image at batch-size 32
Results saved to runs/test/yolov7_test
YOLOv7 修改数据增强部分
训练
- 命令
python -m torch.distributed.launch --nproc_per_node 4 --master_port 9527 train.py --workers 4 --device 0,1,2,3 --sync-bn --batch-size 16 --data data/VisDrone.yaml --img 640 640 --cfg cfg/training/yolov7.yaml --name yolov7_2 --hyp data/hyp.scratch.p5.yaml
分辨率:
640*640
结果输出所在文件夹:
yolov7_25
epoch数量:设置的300
修改部分:
- 运用cutout
# Apply cutouts
if random.random() < 0.3:
labels = cutout(img, labels)
- hyp
lr0: 0.01 # initial learning rate (SGD=1E-2, Adam=1E-3)
lrf: 0.1 # final OneCycleLR learning rate (lr0 * lrf)
momentum: 0.937 # SGD momentum/Adam beta1
weight_decay: 0.0005 # optimizer weight decay 5e-4
warmup_epochs: 3.0 # warmup epochs (fractions ok)
warmup_momentum: 0.8 # warmup initial momentum
warmup_bias_lr: 0.1 # warmup initial bias lr
box: 0.05 # box loss gain
cls: 0.3 # cls loss gain
cls_pw: 1.0 # cls BCELoss positive_weight
obj: 0.7 # obj loss gain (scale with pixels)
obj_pw: 1.0 # obj BCELoss positive_weight
iou_t: 0.20 # IoU training threshold
anchor_t: 4.0 # anchor-multiple threshold
# anchors: 3 # anchors per output layer (0 to ignore)
fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)
hsv_h: 0.015 # image HSV-Hue augmentation (fraction)
hsv_s: 0.7 # image HSV-Saturation augmentation (fraction)
hsv_v: 0.4 # image HSV-Value augmentation (fraction)
degrees: 0.0 # image rotation (+/- deg)
translate: 0.2 # image translation (+/- fraction)
scale: 0.9 # image scale (+/- gain)
#shear: 0.0 # image shear (+/- deg)
shear: 0.3
perspective: 0.0 # image perspective (+/- fraction), range 0-0.001
#flipud: 0.0 # image flip up-down (probability)
flipud: 0.3 # image flip up-down (probability)
fliplr: 0.5 # image flip left-right (probability)
mosaic: 1.0 # image mosaic (probability)
#mixup: 0.15 # image mixup (probability)
mixup: 0.30
copy_paste: 0.15 # image copy paste (probability)
paste_in: 0.15 # image copy paste (probability), use 0 for faster training
loss_ota: 1 # use ComputeLossOTA, use 0 for faster training
验证集
- 命令:
python test.py --data data/VisDrone.yaml --img 640 --batch 32 --device 0,1 --weights /disk2/lxs/yolov7/runs/train/yolov7_25/weights/best.pt --name yolov7_val --task val
- 结果
val: Scanning 'datasets/VisDrone/val_list.cache' images and labels... 548 found, 0 missing, 0 empty, 0 corrupted: 100%|███████████████████████████████████████| 548/548 [00:00<?, ?it/s]
Class Images Labels P R [email protected] [email protected]:.95: 100%|█████████████████████████████████████████████████████| 18/18 [00:18<00:00, 1.01s/it]
all 548 38759 0.586 0.512 0.504 0.291
pedestrian 548 8844 0.649 0.546 0.579 0.263
people 548 5125 0.572 0.528 0.502 0.194
bicycle 548 1287 0.453 0.258 0.261 0.111
car 548 14064 0.774 0.843 0.852 0.587
van 548 1975 0.602 0.513 0.519 0.36
truck 548 750 0.618 0.477 0.486 0.323
tricycle 548 1045 0.5 0.451 0.401 0.222
awning-tricycle 548 532 0.346 0.246 0.194 0.119
bus 548 251 0.763 0.614 0.64 0.463
motor 548 4886 0.581 0.647 0.603 0.272
Speed: 7.8/2.1/9.8 ms inference/NMS/total per 640x640 image at batch-size 32
Results saved to runs/test/yolov7_val2
测试集
- 命令:
python test.py --data data/VisDrone.yaml --img 640 --batch 32 --device 0,1 --weights /disk2/lxs/yolov7/runs/train/yolov7_25/weights/best.pt --name yolov7_test --task test
- 结果
test: Scanning 'datasets/VisDrone/test_list.cache' images and labels... 1610 found, 0 missing, 0 empty, 0 corrupted: 100%|██████████████████████████████████| 1610/1610 [00:00<?, ?it/s]
Class Images Labels P R [email protected] [email protected]:.95: 100%|█████████████████████████████████████████████████████| 51/51 [00:36<00:00, 1.41it/s]
all 1610 75102 0.539 0.44 0.421 0.234
pedestrian 1610 21006 0.566 0.391 0.391 0.154
people 1610 6376 0.52 0.294 0.274 0.0912
bicycle 1610 1302 0.403 0.201 0.188 0.076
car 1610 28074 0.741 0.803 0.797 0.496
van 1610 5771 0.525 0.463 0.451 0.297
truck 1610 2659 0.586 0.526 0.521 0.33
tricycle 1610 530 0.349 0.362 0.271 0.14
awning-tricycle 1610 599 0.44 0.266 0.246 0.136
bus 1610 2940 0.743 0.611 0.645 0.446
motor 1610 5845 0.514 0.488 0.427 0.169
Speed: 8.0/1.2/9.2 ms inference/NMS/total per 640x640 image at batch-size 32
Results saved to runs/test/yolov7_test2
YOLOv7 第二次修改数据增强部分 使用albumentations
训练
- 命令
python -m torch.distributed.launch --nproc_per_node 4 --master_port 9527 train.py --workers 4 --device 0,1,2,3 --sync-bn --batch-size 16 --data data/VisDrone.yaml --img 640 640 --cfg cfg/training/yolov7.yaml --name yolov7_3 --hyp data/hyp.scratch.p5.yaml
分辨率:
640*640
结果输出所在文件夹:
yolov7_3
epoch数量:设置的300
修改部分:albumentations的transform为
self.transform = A.Compose([
A.CLAHE(p=0.01),
A.CropAndPad(percent=-0.25,p=0.2),
A.RandomBrightnessContrast(brightness_limit=0.2, contrast_limit=0.2, p=0.01),
A.RandomGamma(gamma_limit=[80, 120], p=0.01),
A.Blur(p=0.01),
A.MedianBlur(p=0.01),
A.ToGray(p=0.01),
A.ImageCompression(quality_lower=75, p=0.01),],
bbox_params=A.BboxParams(format='pascal_voc', label_fields=['class_labels']))
验证集
- 命令:
python test.py --data data/VisDrone.yaml --img 640 --batch 32 --device 0,1 --weights /disk2/lxs/yolov7/runs/train/yolov7_3/weights/best.pt --name yolov7_val --task val
- 结果
val: Scanning 'datasets/VisDrone/val_list.cache' images and labels... 548 found, 0 missing, 0 empty, 0 corrupted: 100%|███████████████████████████████████████| 548/548 [00:00<?, ?it/s]
Class Images Labels P R [email protected] [email protected]:.95: 100%|█████████████████████████████████████████████████████| 18/18 [00:18<00:00, 1.01s/it]
all 548 38759 0.609 0.492 0.502 0.289
pedestrian 548 8844 0.692 0.516 0.574 0.262
people 548 5125 0.61 0.498 0.497 0.192
bicycle 548 1287 0.473 0.23 0.261 0.111
car 548 14064 0.797 0.831 0.852 0.584
van 548 1975 0.612 0.502 0.513 0.351
truck 548 750 0.64 0.454 0.472 0.311
tricycle 548 1045 0.516 0.431 0.402 0.22
awning-tricycle 548 532 0.346 0.212 0.199 0.124
bus 548 251 0.791 0.625 0.647 0.461
motor 548 4886 0.609 0.624 0.603 0.275
Speed: 7.8/2.0/9.8 ms inference/NMS/total per 640x640 image at batch-size 32
Results saved to runs/test/yolov7_val3
测试集
- 命令:
python test.py --data data/VisDrone.yaml --img 640 --batch 32 --device 0,1 --weights /disk2/lxs/yolov7/runs/train/yolov7_3/weights/best.pt --name yolov7_test --task test
- 结果
test: Scanning 'datasets/VisDrone/test_list.cache' images and labels... 1610 found, 0 missing, 0 empty, 0 corrupted: 100%|██████████████████████████████████| 1610/1610 [00:00<?, ?it/s]
Class Images Labels P R [email protected] [email protected]:.95: 100%|█████████████████████████████████████████████████████| 51/51 [00:36<00:00, 1.38it/s]
all 1610 75102 0.554 0.439 0.425 0.236
pedestrian 1610 21006 0.588 0.38 0.391 0.153
people 1610 6376 0.562 0.283 0.277 0.0933
bicycle 1610 1302 0.419 0.182 0.186 0.0734
car 1610 28074 0.749 0.794 0.794 0.494
van 1610 5771 0.517 0.467 0.449 0.293
truck 1610 2659 0.585 0.532 0.529 0.342
tricycle 1610 530 0.364 0.377 0.274 0.144
awning-tricycle 1610 599 0.462 0.283 0.265 0.152
bus 1610 2940 0.76 0.609 0.651 0.449
motor 1610 5845 0.53 0.483 0.429 0.169
Speed: 7.9/1.3/9.2 ms inference/NMS/total per 640x640 image at batch-size 32
Results saved to runs/test/yolov7_test3
YOLOv7 修改尺寸为1280*1280 使用multi-scale
训练
- 命令
python -m torch.distributed.launch --nproc_per_node 4 --master_port 9527 train.py --workers 4 --device 0,1,2,3 --sync-bn --batch-size 4 --data data/VisDrone.yaml --img 1280 1280 --cfg cfg/training/yolov7.yaml --name yolov7_4 --hyp data/hyp.scratch.p5.yaml --multi-scale
分辨率:
1280*1280
结果输出所在文件夹:
yolov7_43
epoch数量:设置的300(用于被我神经病改数据集操作,导致提前终止了。。)
验证集
- 命令
1280:
python test.py --data data/VisDrone.yaml --img 1280 --batch 32 --device 0,1 --weights /disk2/lxs/yolov7/runs/train/yolov7_43/weights/best.pt --name yolov7_val --task val
- 结果
1280
val: Scanning 'datasets/VisDrone/val_list.cache' images and labels... 548 found, 0 missing, 0 empty, 0 corrupted: 100%|███████████████████████████████████████| 548/548 [00:00<?, ?it/s]
Class Images Labels P R [email protected] [email protected]:.95: 100%|█████████████████████████████████████████████████████| 18/18 [00:33<00:00, 1.86s/it]
all 548 38759 0.651 0.557 0.581 0.353
pedestrian 548 8844 0.76 0.604 0.677 0.332
people 548 5125 0.693 0.511 0.548 0.225
bicycle 548 1287 0.453 0.403 0.391 0.191
car 548 14064 0.842 0.863 0.892 0.638
van 548 1975 0.642 0.579 0.605 0.436
truck 548 750 0.631 0.549 0.564 0.392
tricycle 548 1045 0.594 0.475 0.472 0.279
awning-tricycle 548 532 0.403 0.325 0.258 0.166
bus 548 251 0.815 0.63 0.735 0.551
motor 548 4886 0.68 0.633 0.663 0.317
Speed: 29.6/3.6/33.2 ms inference/NMS/total per 1280x1280 image at batch-size 32
Results saved to runs/test/yolov7_val4
- 命令
1600:
python test.py --data data/VisDrone.yaml --img 1600 --batch 32 --device 0,1 --weights /disk2/lxs/yolov7/runs/train/yolov7_43/weights/best.pt --name yolov7_val --task val
- 结果
1600
val: Scanning 'datasets/VisDrone/val_list.cache' images and labels... 548 found, 0 missing, 0 empty, 0 corrupted: 100%|███████████████████████████████████████| 548/548 [00:00<?, ?it/s]
Class Images Labels P R [email protected] [email protected]:.95: 100%|█████████████████████████████████████████████████████| 18/18 [00:43<00:00, 2.43s/it]
all 548 38759 0.67 0.567 0.6 0.367
pedestrian 548 8844 0.774 0.632 0.71 0.355
people 548 5125 0.718 0.516 0.567 0.233
bicycle 548 1287 0.524 0.421 0.427 0.212
car 548 14064 0.856 0.863 0.902 0.651
van 548 1975 0.671 0.587 0.623 0.453
truck 548 750 0.633 0.544 0.563 0.393
tricycle 548 1045 0.576 0.484 0.492 0.294
awning-tricycle 548 532 0.418 0.308 0.271 0.178
bus 548 251 0.828 0.673 0.762 0.571
motor 548 4886 0.701 0.644 0.683 0.333
Speed: 47.2/3.8/51.0 ms inference/NMS/total per 1600x1600 image at batch-size 32
Results saved to runs/test/yolov7_val5
- 命令
2240:
python test.py --data data/VisDrone.yaml --img 2240 --batch 32 --device 0,1 --weights /disk2/lxs/yolov7/runs/train/yolov7_43/weights/best.pt --name yolov7_val --task val
- 结果
2240
val: Scanning 'datasets/VisDrone/val_list.cache' images and labels... 548 found, 0 missing, 0 empty, 0 corrupted: 100%|███████████████████████████████████████| 548/548 [00:00<?, ?it/s]
Class Images Labels P R [email protected] [email protected]:.95: 100%|█████████████████████████████████████████████████████| 18/18 [01:21<00:00, 4.55s/it]
all 548 38759 0.638 0.602 0.607 0.373
pedestrian 548 8844 0.732 0.685 0.729 0.374
people 548 5125 0.68 0.558 0.579 0.243
bicycle 548 1287 0.511 0.44 0.435 0.214
car 548 14064 0.836 0.883 0.907 0.661
van 548 1975 0.618 0.61 0.628 0.462
truck 548 750 0.586 0.579 0.56 0.388
tricycle 548 1045 0.535 0.526 0.495 0.295
awning-tricycle 548 532 0.413 0.344 0.288 0.189
bus 548 251 0.805 0.691 0.752 0.562
motor 548 4886 0.661 0.702 0.697 0.343
Speed: 110.1/8.1/118.2 ms inference/NMS/total per 2240x2240 image at batch-size 32
Results saved to runs/test/yolov7_val6
测试集
- 命令:
python test.py --data data/VisDrone.yaml --img 1600 --batch 32 --device 0,1 --weights /disk2/lxs/yolov7/runs/train/yolov7_43/weights/best.pt --name yolov7_test --task test
[yolov7] 0:bash*
- 结果
test: Scanning 'datasets/VisDrone/test_list.cache' images and labels... 1610 found, 0 missing, 0 empty, 0 corrupted: 100%|██████████████████████████████████| 1610/1610 [00:00<?, ?it/s]
Class Images Labels P R [email protected] [email protected]:.95: 100%|█████████████████████████████████████████████████████| 51/51 [01:50<00:00, 2.16s/it]
all 1610 75102 0.589 0.519 0.508 0.298
pedestrian 1610 21006 0.634 0.497 0.515 0.216
people 1610 6376 0.592 0.333 0.344 0.124
bicycle 1610 1302 0.429 0.308 0.282 0.129
car 1610 28074 0.797 0.851 0.863 0.564
van 1610 5771 0.602 0.532 0.566 0.395
truck 1610 2659 0.597 0.633 0.608 0.406
tricycle 1610 530 0.357 0.483 0.345 0.199
awning-tricycle 1610 599 0.505 0.348 0.312 0.195
bus 1610 2940 0.799 0.637 0.721 0.52
motor 1610 5845 0.573 0.567 0.521 0.229
Speed: 50.1/2.4/52.4 ms inference/NMS/total per 1600x1600 image at batch-size 32
Results saved to runs/test/yolov7_test6
YOLOv7 输入切分四块的照片(过拟合了)
训练
- 命令
python -m torch.distributed.launch --nproc_per_node 4 --master_port 9527 train.py --workers 4 --device 0,1,2,3 --sync-bn --batch-size 8 --data data/VisDrone.yaml --img 1280 1280 --cfg cfg/training/yolov7.yaml --name yolov7_split --hyp data/hyp.scratch.p5.yaml --multi-scale
分辨率:
1280*1280
结果输出所在文件夹:
yolov7_split3
epoch数量:…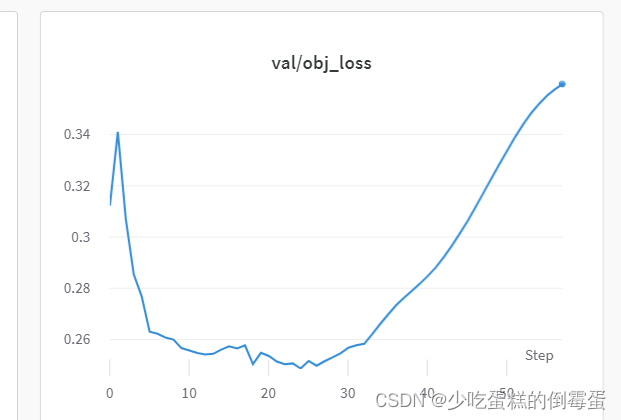
验证集
- 命令
1280:
python test.py --data data/VisDrone.yaml --img 1280 --batch 32 --device 0,1 --weights /disk2/lxs/yolov7/runs/train/yolov7_split3/weights/best.pt --name yolov7_val --task val
- 结果
1280
val: Scanning 'datasets/VisDrone/val_list.cache' images and labels... 548 found, 0 missing, 0 empty, 0 corrupted: 100%|███████████████████████████████████████| 548/548 [00:00<?, ?it/s]
Class Images Labels P R [email protected] [email protected]:.95: 100%|█████████████████████████████████████████████████████| 18/18 [00:33<00:00, 1.85s/it]
all 548 38759 0.656 0.563 0.584 0.36
pedestrian 548 8844 0.746 0.611 0.675 0.337
people 548 5125 0.681 0.53 0.561 0.233
bicycle 548 1287 0.502 0.38 0.395 0.197
car 548 14064 0.833 0.865 0.888 0.64
van 548 1975 0.662 0.564 0.601 0.438
truck 548 750 0.648 0.552 0.569 0.395
tricycle 548 1045 0.609 0.465 0.481 0.293
awning-tricycle 548 532 0.386 0.342 0.27 0.176
bus 548 251 0.819 0.669 0.73 0.562
motor 548 4886 0.677 0.651 0.673 0.328
Speed: 29.5/3.7/33.2 ms inference/NMS/total per 1280x1280 image at batch-size 32
Results saved to runs/test/yolov7_val7
- 命令
2016:
python test.py --data data/VisDrone.yaml --img 2016 --batch 32 --device 0,1 --weights /disk2/lxs/yolov7/runs/train/yolov7_split3/weights/best.pt --name yolov7_val --task val
- 结果
2016
val: Scanning 'datasets/VisDrone/val_list.cache' images and labels... 548 found, 0 missing, 0 empty, 0 corrupted: 100%|███████████████████████████████████████| 548/548 [00:00<?, ?it/s]
Class Images Labels P R [email protected] [email protected]:.95: 100%|█████████████████████████████████████████████████████| 18/18 [01:02<00:00, 3.44s/it]
all 548 38759 0.659 0.629 0.636 0.4
pedestrian 548 8844 0.731 0.703 0.74 0.388
people 548 5125 0.702 0.595 0.617 0.269
bicycle 548 1287 0.545 0.458 0.472 0.245
car 548 14064 0.838 0.892 0.912 0.671
van 548 1975 0.654 0.622 0.639 0.476
truck 548 750 0.65 0.604 0.605 0.423
tricycle 548 1045 0.585 0.564 0.542 0.332
awning-tricycle 548 532 0.389 0.391 0.307 0.205
bus 548 251 0.815 0.737 0.799 0.618
motor 548 4886 0.679 0.728 0.728 0.372
Speed: 78.6/4.2/82.9 ms inference/NMS/total per 2016x2016 image at batch-size 32
Results saved to runs/test/yolov7_val14
测试集
- 命令:
python test.py --data data/VisDrone.yaml --img 1280 --batch 32 --device 0,1 --weights /disk2/lxs/yolov7/runs/train/yolov7_split3/weights/best.pt --name yolov7_val --task test
- 结果
test: Scanning 'datasets/VisDrone/test_list.cache' images and labels... 1610 found, 0 missing, 0 empty, 0 corrupted: 100%|██████████████████████████████████| 1610/1610 [00:00<?, ?it/s]
Class Images Labels P R [email protected] [email protected]:.95: 100%|█████████████████████████████████████████████████████| 51/51 [01:20<00:00, 1.58s/it]
all 1610 75102 0.575 0.507 0.494 0.292
pedestrian 1610 21006 0.629 0.465 0.479 0.203
people 1610 6376 0.592 0.31 0.322 0.116
bicycle 1610 1302 0.438 0.244 0.249 0.115
car 1610 28074 0.771 0.847 0.85 0.553
van 1610 5771 0.566 0.546 0.546 0.38
truck 1610 2659 0.592 0.625 0.621 0.421
tricycle 1610 530 0.381 0.449 0.336 0.193
awning-tricycle 1610 599 0.464 0.343 0.303 0.19
bus 1610 2940 0.75 0.685 0.726 0.531
motor 1610 5845 0.567 0.556 0.509 0.218
Speed: 32.4/2.2/34.6 ms inference/NMS/total per 1280x1280 image at batch-size 32
Results saved to runs/test/yolov7_val8
- 命令
2016:
python test.py --data data/VisDrone.yaml --img 2016 --batch 32 --device 0,1 --weights /disk2/lxs/yolov7/runs/train/yolov7_split3/weights/best.pt --name yolov7_val --task test
- 结果
2016:
test: Scanning 'datasets/VisDrone/test_list.cache' images and labels... 1610 found, 0 missing, 0 empty, 0 corrupted: 100%|██████████████████████████████████| 1610/1610 [00:00<?, ?it/s]
Class Images Labels P R [email protected] [email protected]:.95: 100%|█████████████████████████████████████████████████████| 51/51 [02:53<00:00, 3.40s/it]
all 1610 75102 0.616 0.537 0.532 0.318
pedestrian 1610 21006 0.675 0.525 0.552 0.238
people 1610 6376 0.647 0.337 0.37 0.137
bicycle 1610 1302 0.484 0.293 0.289 0.139
car 1610 28074 0.795 0.864 0.874 0.578
van 1610 5771 0.614 0.555 0.576 0.41
truck 1610 2659 0.631 0.645 0.639 0.438
tricycle 1610 530 0.403 0.509 0.389 0.232
awning-tricycle 1610 599 0.508 0.361 0.322 0.206
bus 1610 2940 0.779 0.691 0.746 0.55
motor 1610 5845 0.62 0.595 0.564 0.256
Speed: 86.9/3.7/90.6 ms inference/NMS/total per 2016x2016 image at batch-size 32
Results saved to runs/test/yolov7_val15
YOLOv7 输入切分四块的照片(第三次修改数据增强 未使用albumentation)
训练
- 命令
python -m torch.distributed.launch --nproc_per_node 4 --master_port 9527 train.py --workers 4 --device 0,1,2,3 --sync-bn --batch-size 8 --data data/VisDrone.yaml --img 1280 1280 --cfg cfg/training/yolov7.yaml --name yolov7_split --hyp data/hyp.scratch.p5.yaml --multi-scale
分辨率:
1280*1280
结果输出所在文件夹:
yolov7_split5
epoch数量:…
验证集
- 命令
1280:
python test.py --data data/VisDrone.yaml --img 1280 --batch 32 --device 0,1 --weights /disk2/lxs/yolov7/runs/train/yolov7_split5/weights/best.pt --name yolov7_val --task val
- 结果
1280
val: Scanning 'datasets/VisDrone/val_list.cache' images and labels... 548 found, 0 missing, 0 empty, 0 corrupted: 100%|███████████████████████████████████████| 548/548 [00:00<?, ?it/s]
Class Images Labels P R [email protected] [email protected]:.95: 100%|█████████████████████████████████████████████████████| 18/18 [01:03<00:00, 3.50s/it]
all 548 38759 0.602 0.563 0.561 0.344
pedestrian 548 8844 0.673 0.677 0.688 0.346
people 548 5125 0.66 0.515 0.542 0.222
bicycle 548 1287 0.459 0.392 0.354 0.175
car 548 14064 0.779 0.901 0.899 0.649
van 548 1975 0.566 0.607 0.586 0.429
truck 548 750 0.581 0.477 0.485 0.326
tricycle 548 1045 0.556 0.405 0.421 0.256
awning-tricycle 548 532 0.382 0.306 0.246 0.162
bus 548 251 0.727 0.658 0.722 0.544
motor 548 4886 0.635 0.691 0.673 0.327
Speed: 78.2/6.0/84.1 ms inference/NMS/total per 2016x2016 image at batch-size 32
Results saved to runs/test/yolov7_val11
- 结果
2016
val: Scanning 'datasets/VisDrone/val_list.cache' images and labels... 548 found, 0 missing, 0 empty, 0 corrupted: 100%|███████████████████████████████████████| 548/548 [00:00<?, ?it/s]
Class Images Labels P R [email protected] [email protected]:.95: 100%|█████████████████████████████████████████████████████| 18/18 [01:03<00:00, 3.50s/it]
all 548 38759 0.602 0.563 0.561 0.344
pedestrian 548 8844 0.673 0.677 0.688 0.346
people 548 5125 0.66 0.515 0.542 0.222
bicycle 548 1287 0.459 0.392 0.354 0.175
car 548 14064 0.779 0.901 0.899 0.649
van 548 1975 0.566 0.607 0.586 0.429
truck 548 750 0.581 0.477 0.485 0.326
tricycle 548 1045 0.556 0.405 0.421 0.256
awning-tricycle 548 532 0.382 0.306 0.246 0.162
bus 548 251 0.727 0.658 0.722 0.544
motor 548 4886 0.635 0.691 0.673 0.327
Speed: 78.2/6.0/84.1 ms inference/NMS/total per 2016x2016 image at batch-size 32
Results saved to runs/test/yolov7_val11
测试集
- 命令:
python test.py --data data/VisDrone.yaml --img 2016 --batch 32 --device 0,1 --weights /disk2/lxs/yolov7/runs/train/yolov7_split5/weights/best.pt --name yolov7_val --task test
- 结果
test: Scanning 'datasets/VisDrone/test_list.cache' images and labels... 1610 found, 0 missing, 0 empty, 0 corrupted: 100%|██████████████████████████████████| 1610/1610 [00:00<?, ?it/s]
Class Images Labels P R [email protected] [email protected]:.95: 100%|█████████████████████████████████████████████████████| 51/51 [02:52<00:00, 3.37s/it]
all 1610 75102 0.554 0.475 0.462 0.272
pedestrian 1610 21006 0.631 0.473 0.494 0.207
people 1610 6376 0.57 0.279 0.291 0.104
bicycle 1610 1302 0.433 0.228 0.229 0.103
car 1610 28074 0.75 0.858 0.853 0.561
van 1610 5771 0.536 0.569 0.557 0.392
truck 1610 2659 0.562 0.545 0.536 0.351
tricycle 1610 530 0.338 0.372 0.282 0.163
awning-tricycle 1610 599 0.446 0.289 0.255 0.163
bus 1610 2940 0.748 0.6 0.656 0.474
motor 1610 5845 0.527 0.537 0.472 0.203
Speed: 86.2/4.8/90.9 ms inference/NMS/total per 2016x2016 image at batch-size 32
Results saved to runs/test/yolov7_val12
本文转载自: https://blog.csdn.net/lxslxslxsllll/article/details/128945361
版权归原作者 少吃蛋糕的倒霉蛋 所有, 如有侵权,请联系我们删除。
版权归原作者 少吃蛋糕的倒霉蛋 所有, 如有侵权,请联系我们删除。