
安装 evo
pip install evo --upgrade --no-binary evo
SLAM轨迹
运行ORBSLAM
rosrun ORB_SLAM3 Stereo Vocabulary/ORBvoc.txt Examples/Stereo/RealSense_T265.yaml false
之后会生成一个TUM格式的轨迹FramTrajectory_TUM_Format.txt
GPS轨迹
我们也需要将获取的GPS轨迹转化成笛卡尔坐标下TUM格式坐标
import math
import numpy as np
import rospy
from std_msgs.msg import std_msgs
from plot_py.msg import INS_Data
import time
from matplotlib.animation import FuncAnimation
import os
from math import sin,cos,radians
a =6378137.#长轴
f =1/298.257223563#扁率
fle =open("/home/jiangz/catkin_ws/src/plot_py/data/GPS_301_short.txt",mode ='w')defgps_to_cartesion(lat,lon,alt):
lat = radians(lat)
lon = radians(lon)print(lat,lon,alt)
b = a *(1- f)
e =(a **2- b **2)**0.5/ a
N = a /(1- e **2* sin(lat)**2)**0.5# 计算XYZ坐标
X =(N + alt)* cos(lat)* cos(lon)
Y =(N + alt)* cos(lat)* sin(lon)
Z =(N *(1- e **2)+ alt)* sin(lat)return X,Y,Z
defcallback(data):
x,y,z = gps_to_cartesion(data.latitude,data.longitude,data.altitude)
stamp = data.header.stamp
time =float(stamp.secs)+(stamp.nsecs /1e+9)
fle.write(str(time)+" "+str(x)+" "+str(y)+" "+str(z))
fle.write(" 0. 0. 0. 0.\n")# print(x,y,z)print(str(time)+" "+str(x)+" "+str(y)+" "+str(z))print("\n")defsave_as_txt():
rospy.init_node('GPS',anonymous=True)
rospy.Subscriber("/ins_data",INS_Data,callback)
rospy.spin()
fle.close()
save_as_txt()
使用此代码,将GPS的经纬度海拔信息转换成笛卡尔坐标下的坐标,并且保存成TUM格式
画出图像
轨迹对比图像
链接:https://www.guyuehome.com/18717
里详细介绍了evo方法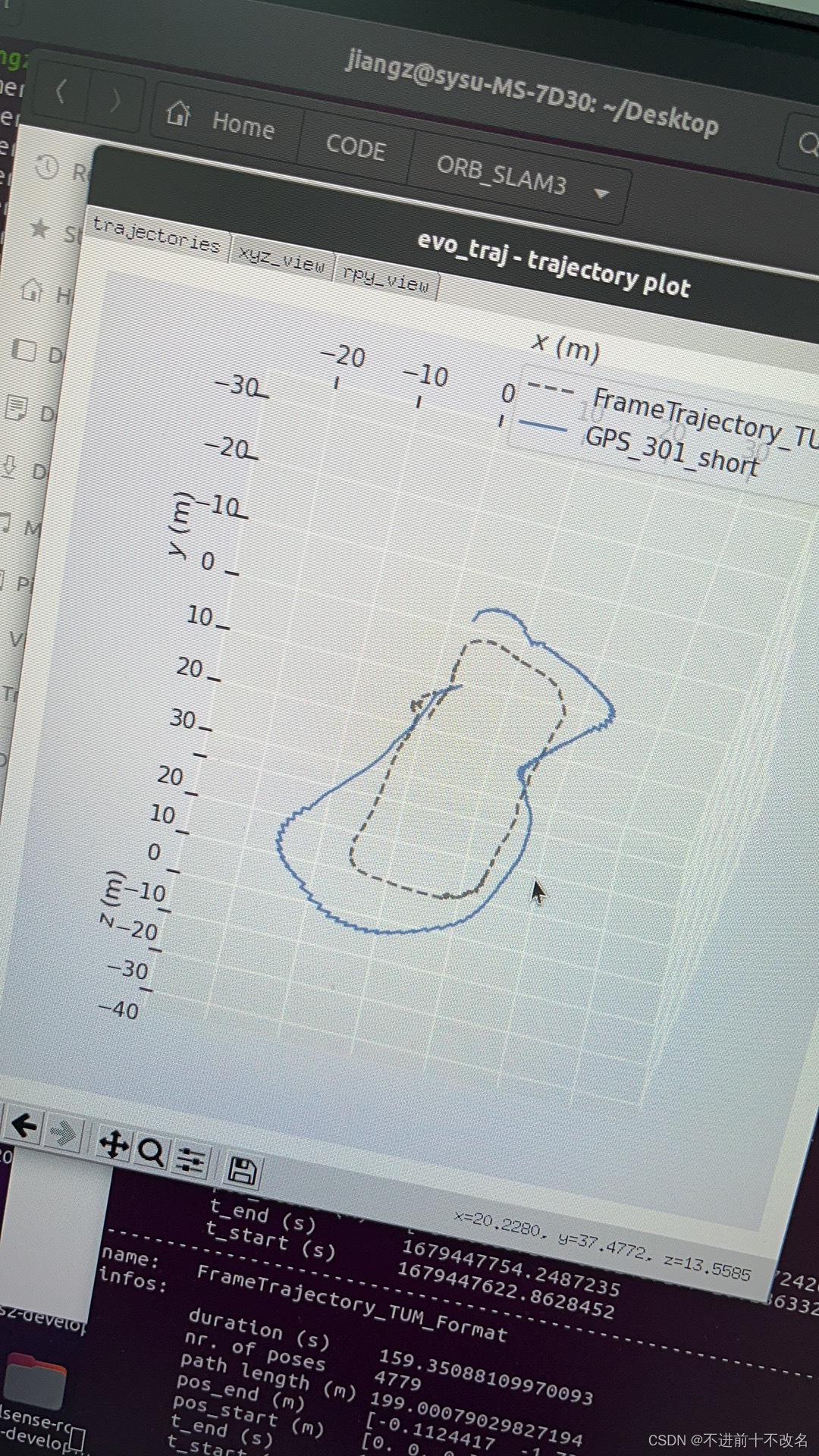
原谅我的GPS测量误差大得离谱。。。。
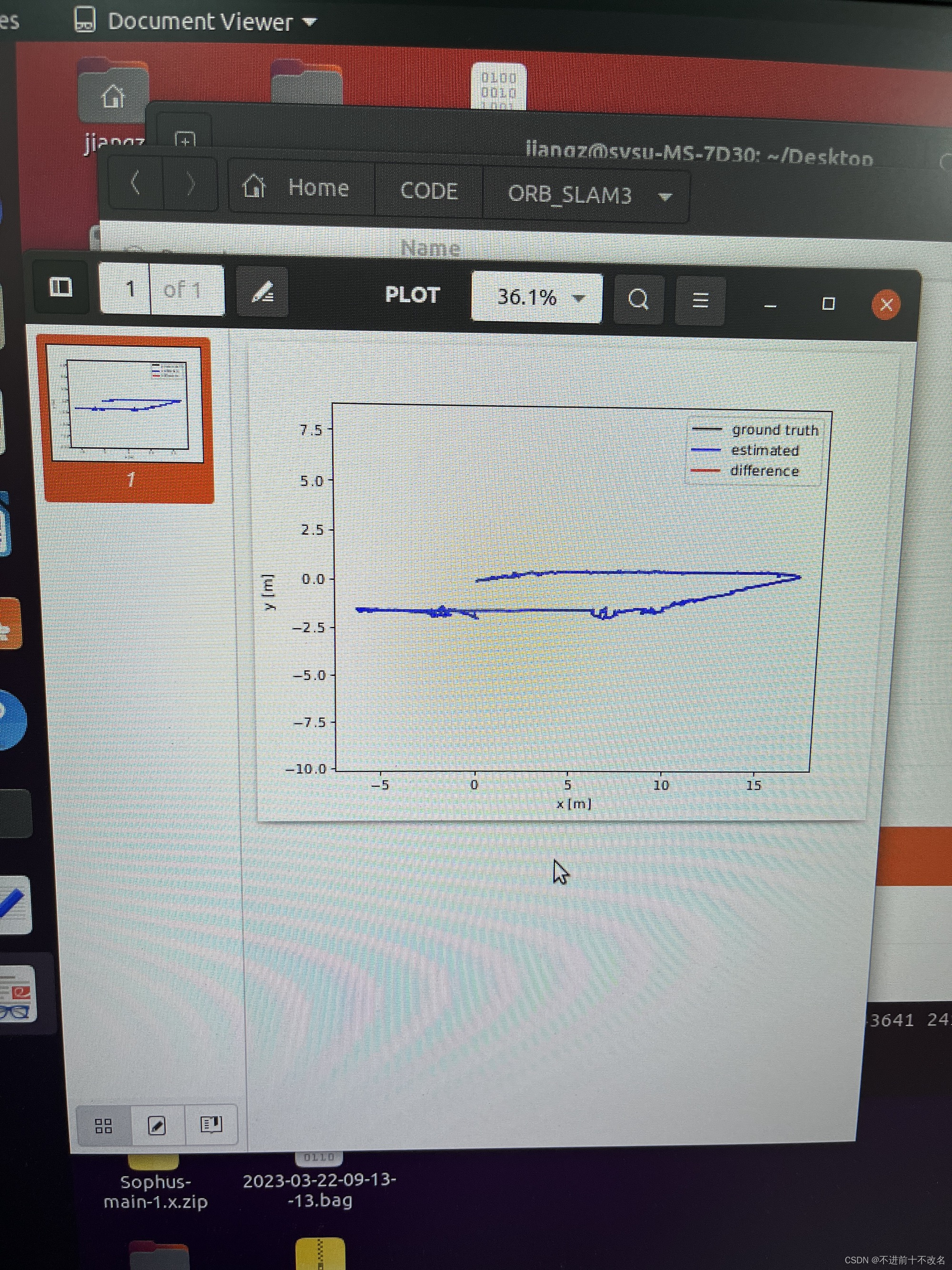
标题单一图像
在ORBSLAM里面自带了一个画图的工具
/evaluation/evaluate_ate_scale.py
python evaluation/evaluate_ate_scale.py FrameTrajectory_TUM_Format.txt FrameTrajectory_TUM_Format.txt --plot PLOT
其中第一个txt文件是真实轨迹,后一个是测量轨迹,正常来说会对两个轨迹进行对比,但是犹豫GPS轨迹在转换成笛卡尔坐标系后,还需要求出R和T之后,才能得到SLAM轨迹相同Scale 的轨迹图,所以使用这个方法比对会比较麻烦。
执行完成后,会在当前目录下生成一个名为PLOT的文件。
本文转载自: https://blog.csdn.net/weixin_44764376/article/details/129705466
版权归原作者 不进前十不改名 所有, 如有侵权,请联系我们删除。
版权归原作者 不进前十不改名 所有, 如有侵权,请联系我们删除。