
使用数据集、方案、分析见博客:多传感器融合方案对比和分析_有名字的人ya的博客-CSDN博客
测试不同的激光雷达和IMU融合的建图方案,视频部分见:LIO系统测试1-LIO_SAM_哔哩哔哩_bilibili
相关代码存放在此仓库:GitHub - coolaogege/Lio_test: A repository for recording the code of the mainstream LIO system.
- 只是大致跑了一下,从直观上感觉当前已有方案的优缺点,没有进行数据评估,因水平有限,难免出错,欢迎指正!
- 测评上主要是:建图效果、轨迹精度、回环检测、运行效率 几个方面
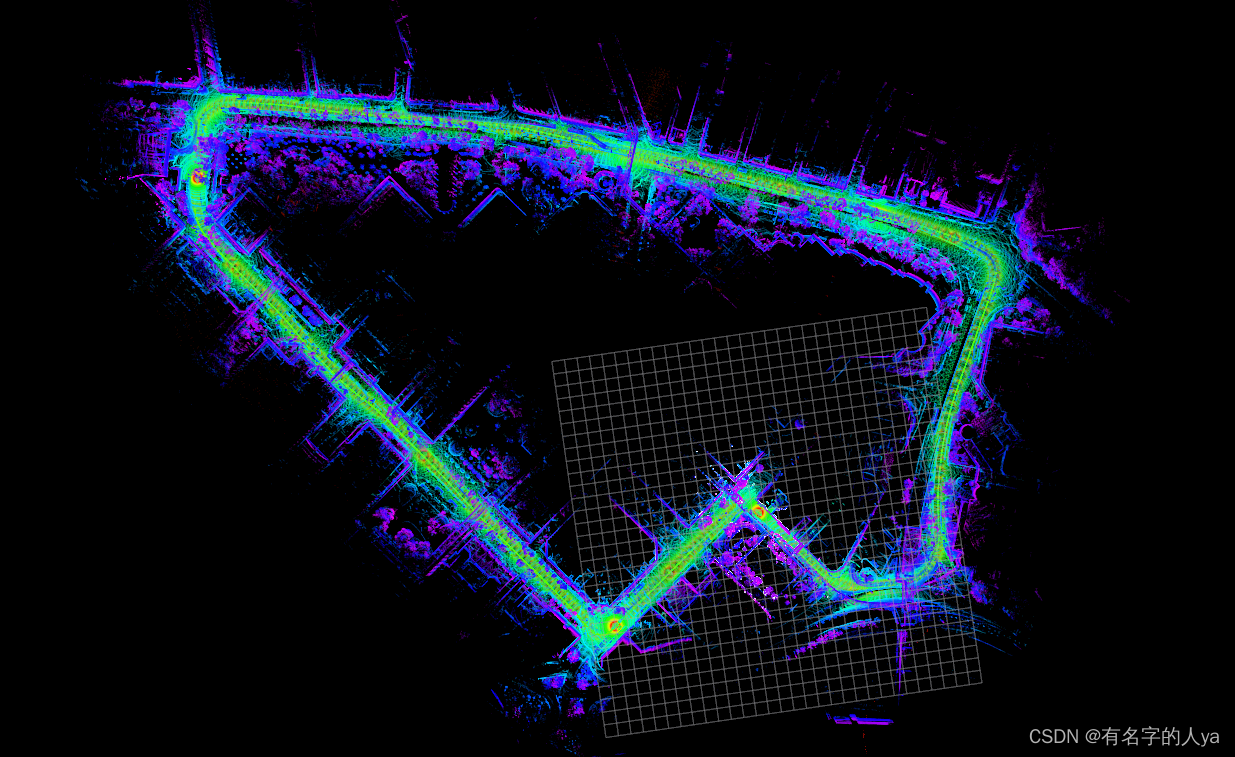
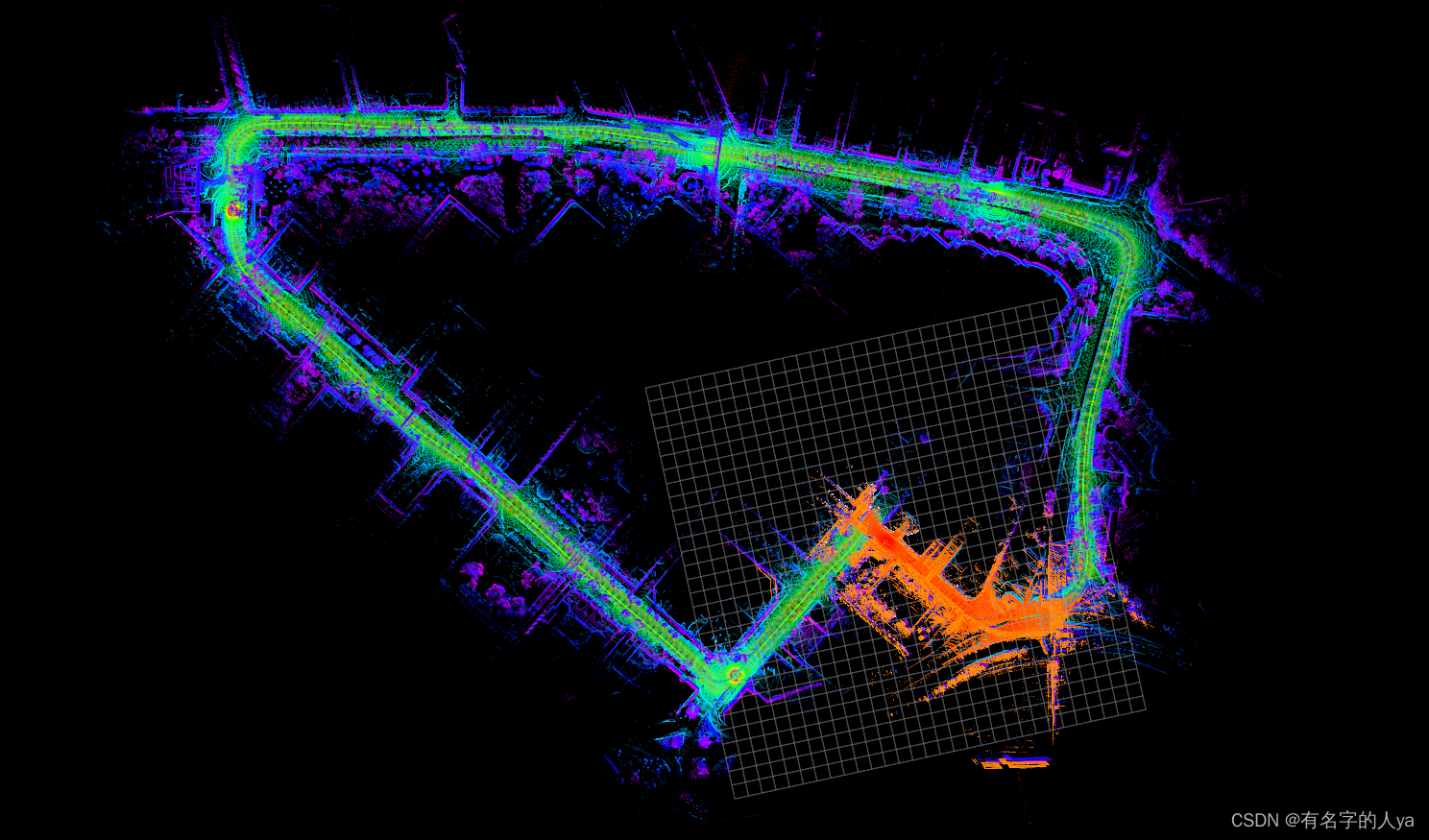
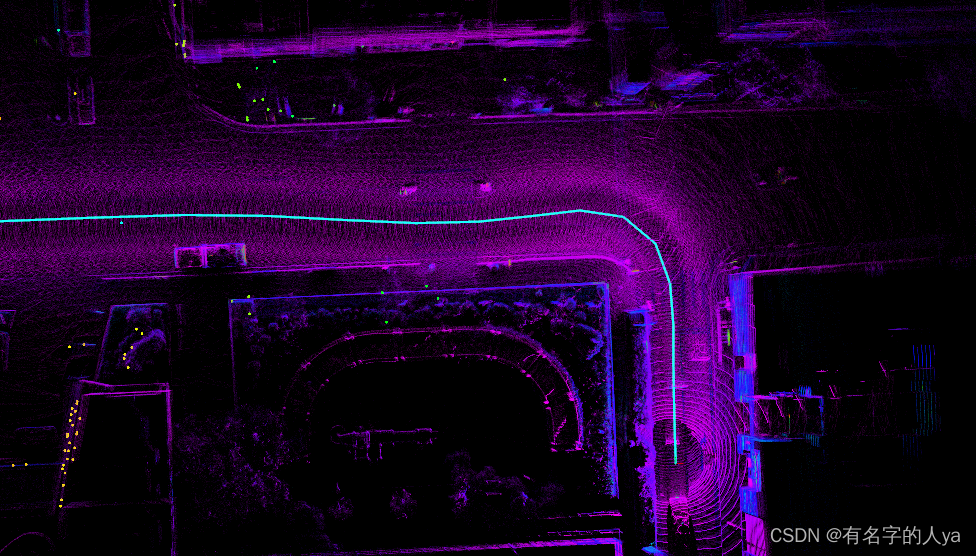
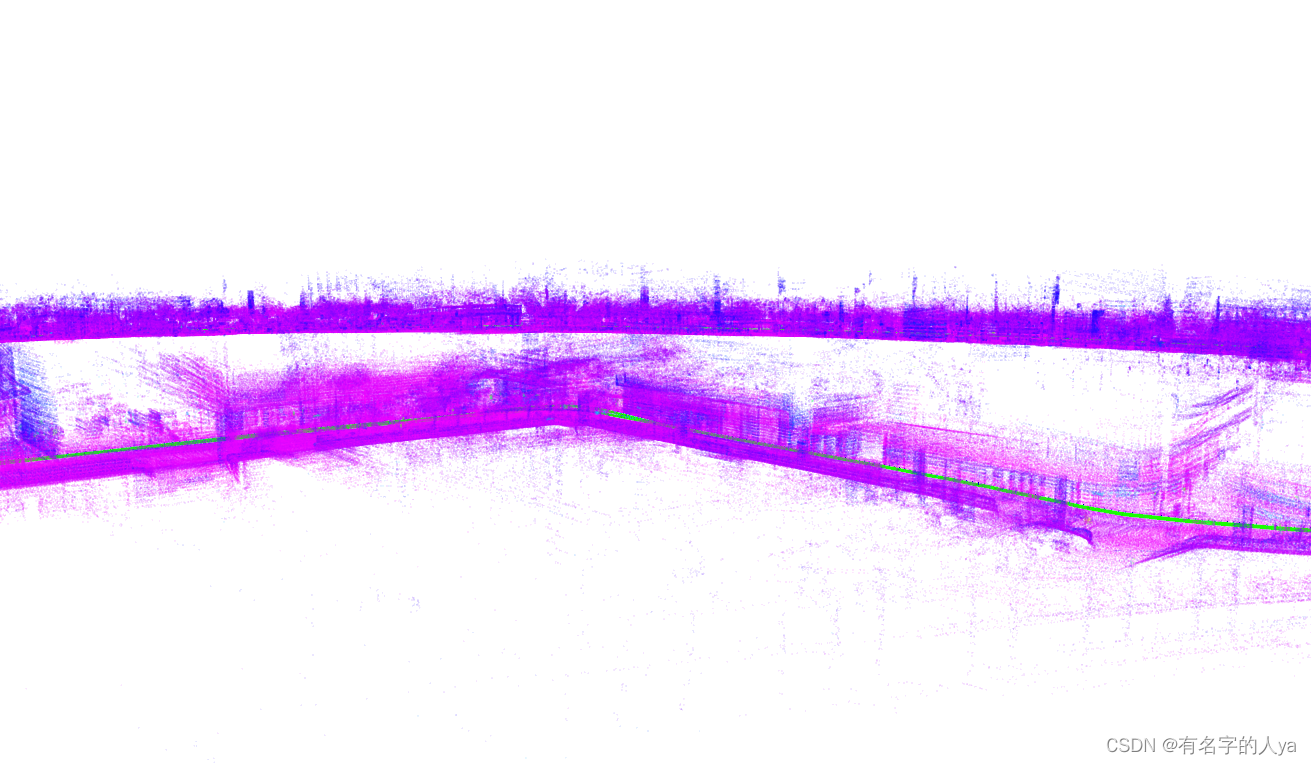
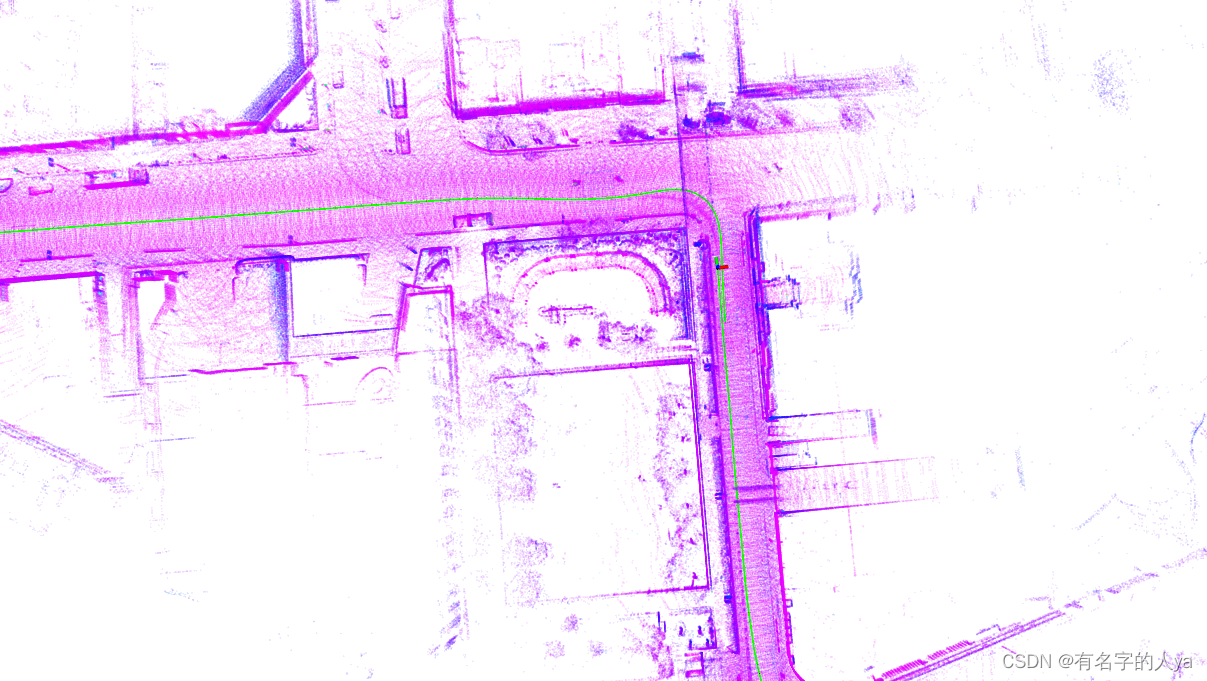
使用LIO-SAM进行测试
使用数据集urbanTST
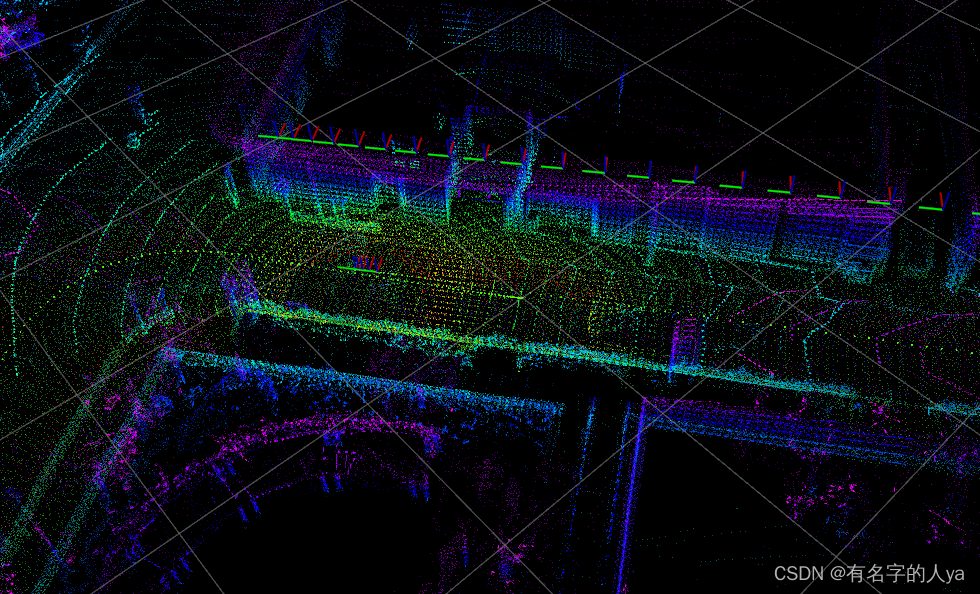
因为LIO-SAM是带有回环检测功能的,能够构建全局一致性的地图!!!
虽然后端没有紧耦合,但是仅依靠IMU的去畸变和预测初值,就已经提供了不错的效果!!
但是感觉点云精细度不如测试的lio-livox 和 fastlio2

使用SSL_SLAM3代码调试激光雷达
参考:
- SSL_SLAM2 同floam代码,只不过是在建图节点上有差别 , 是纯激光里程计
- SSL_SLAM3 代码提供了 紧耦合IMU和LIDAR 的融合方案!
- 但是不含去畸变 ,因此调试 使用 imu 去畸变!
- 在lidar和imu的初始化上不够有效! 调试lidar和imu的初始化!
问题
- 在使用我自己的数据集时 , 我手动计算了 ring 和 time ,但是 依然报错!!! 还没有解决掉!!!
- 这里的IMU话题要手动的修改!
ros::Subscriber sub_imu = nh.subscribe<sensor_msgs::Imu>("/imu/data", 100, imuCallback);
能够跑通了hkust_20201105full.bag , 地图更新 以及 点云话题显示不正确!! 还需要修改!!!
调试了kitti 显示 没有time
调试了mydata 显示没有 time
调试了 urban 显示没有 time
调试了hiti数据集 ouster 64 2048
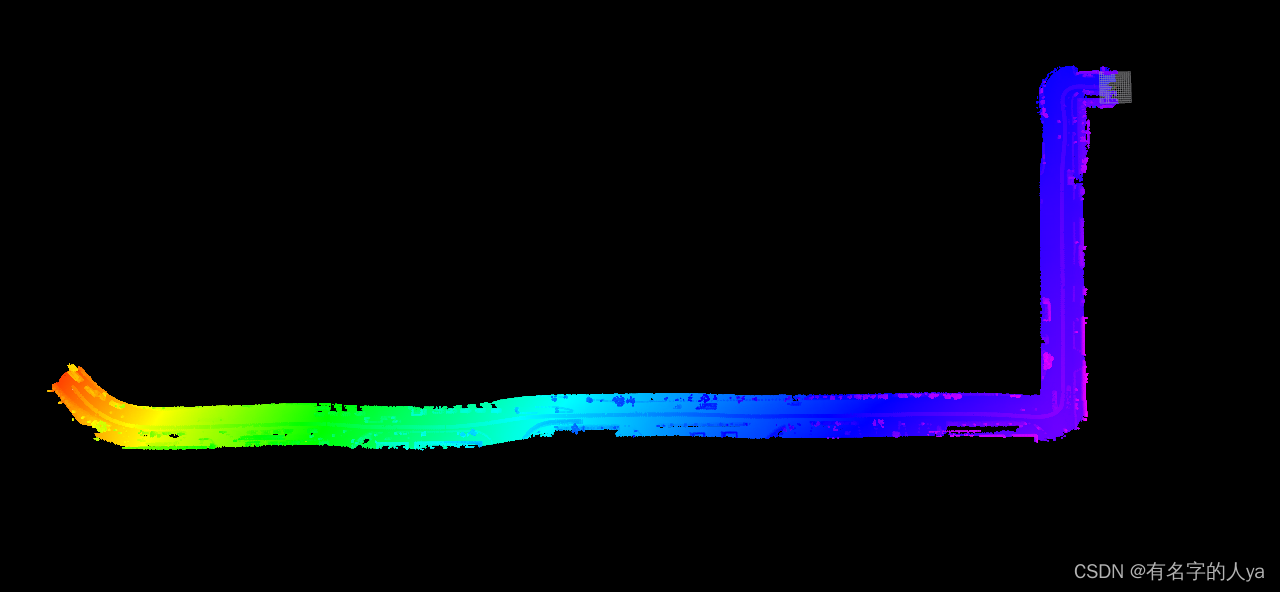
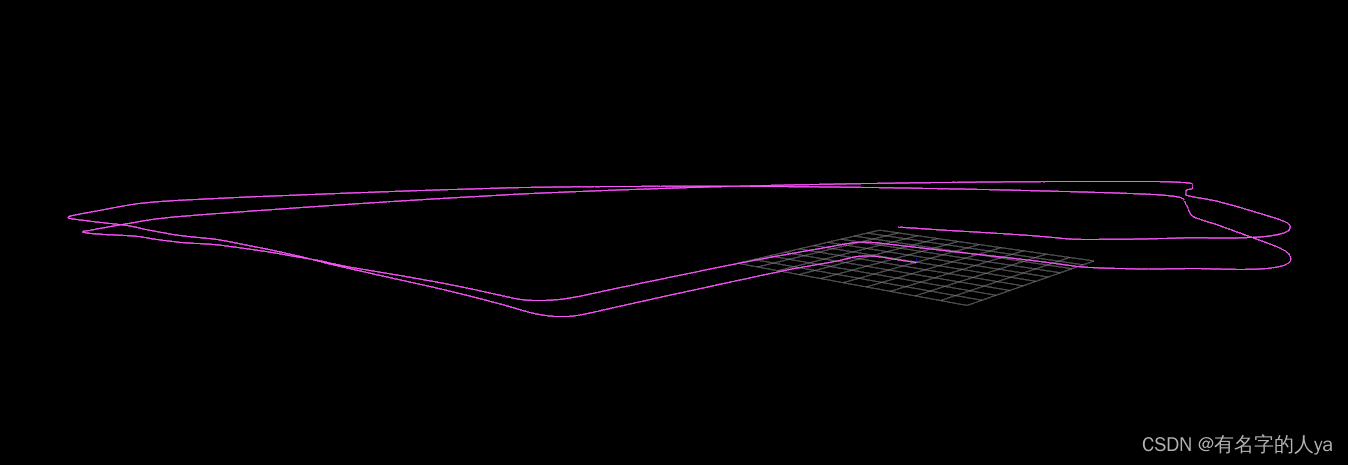
运行示意图
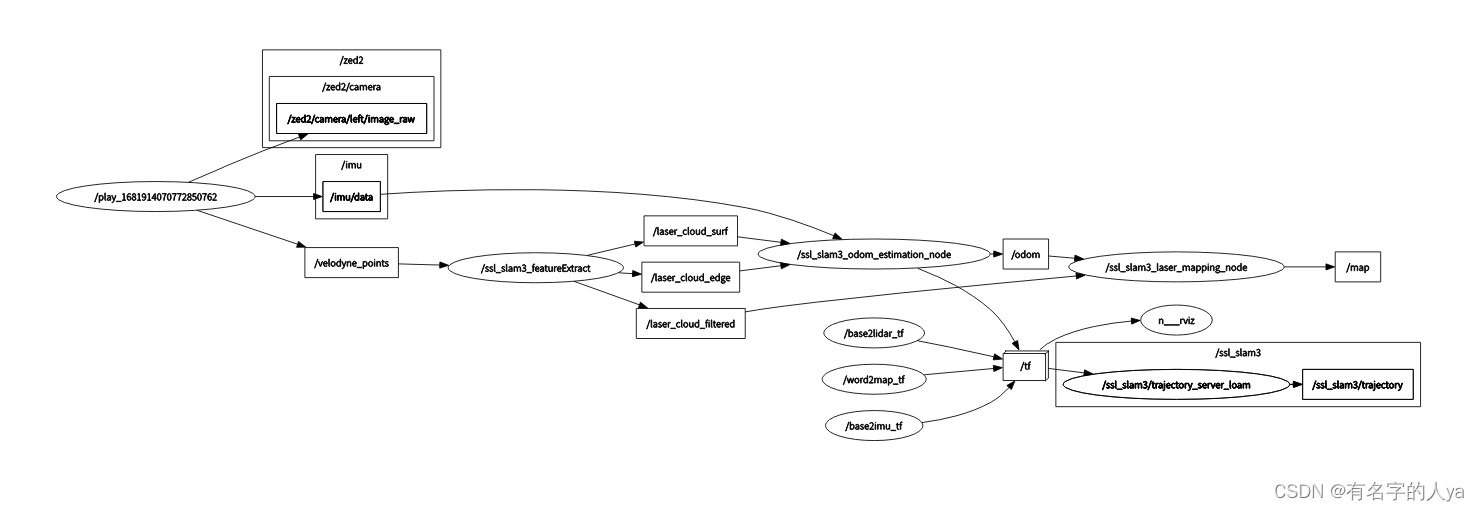
- 数据集urbanTST ssl_slam3_ws
roslaunch ssl_slam3 Urbandata.launch 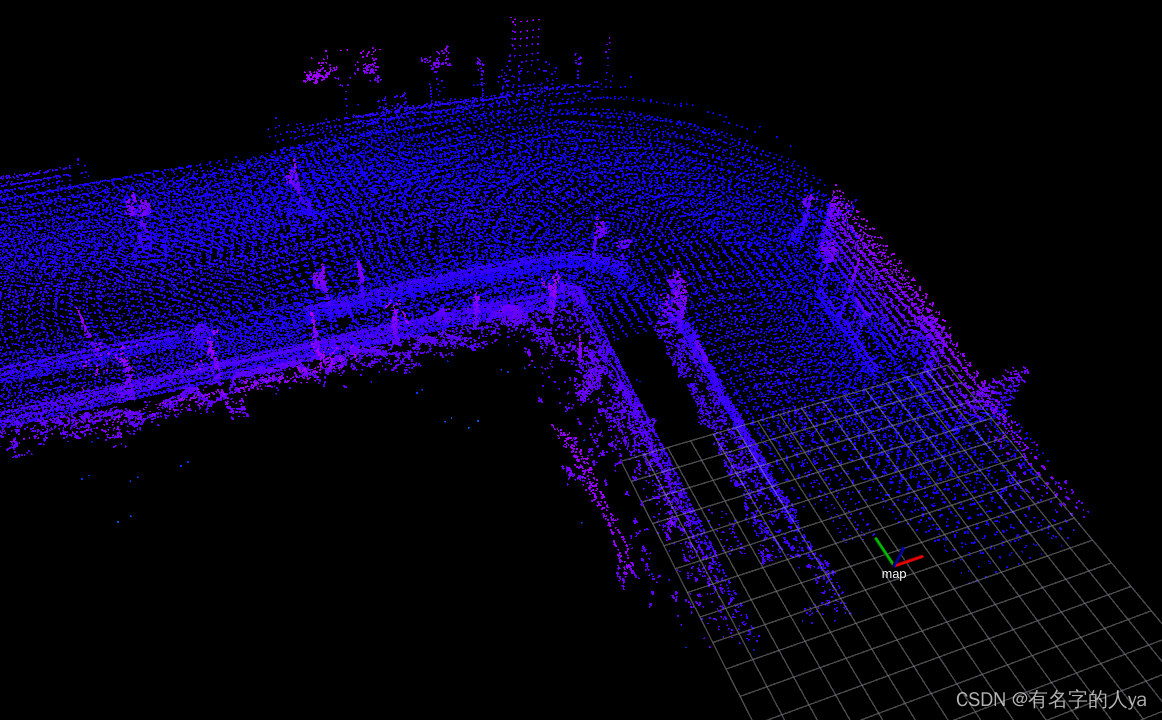
使用LIO-livox-modify代码调试激光雷达
目前代码已经能够跑通,基于修改版本的,在使用IMU紧耦合的基础上出现问题,待查看!
正在阅读源码!! 准备修改为自己数据集的特征提取部分!!!因为自己的数据不含ring、time,需手动解算!
在数据集park上进行了调试!原版(指这个修改过的原来的部分)和修改版本都可以!
使用最原版代码(指最原始版本),在livox-mid360数据集上进行了测试!可以跑通!!
原版代码(指这个修改过的原来的部分),使用紧耦合时 ,特别的慢不知道是为什么,就算只用1,只去畸变,也会慢!! 但是可以跑!看到git上的讨论,好像是对电脑要求比较高!!
park数据集 ,UrbanTST数据集可用 , 注意修改外参和IMU的内参!!!
修改过的代码,只进行去畸变,代码也可以跑,但是使用了紧耦合,代码报错!!!这一部分待检查!!!
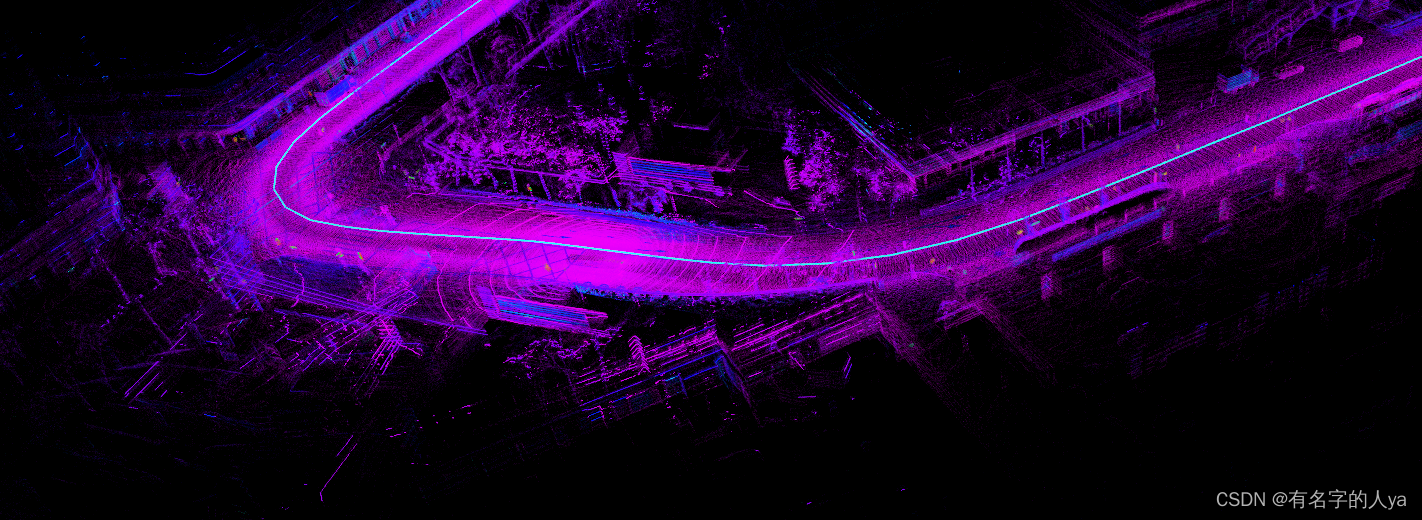
使用数据集urbanTST lio-livox-modify_ws- 使用原版(指这个修改过的原来的部分) 使用紧耦合!! 我的电脑不能够实时跑!
roslaunch lio_livox run.launch- 使用修改的代码,前段特征提取 和 idtree更新地图 IMU仅使用于去畸变!! 我的电脑不能够实时跑!roslaunch lio_livox run_ikd.launch
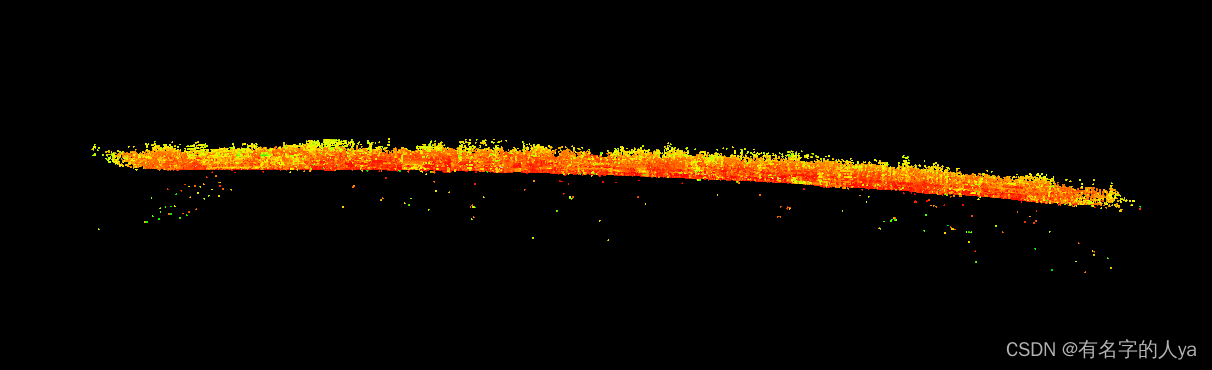
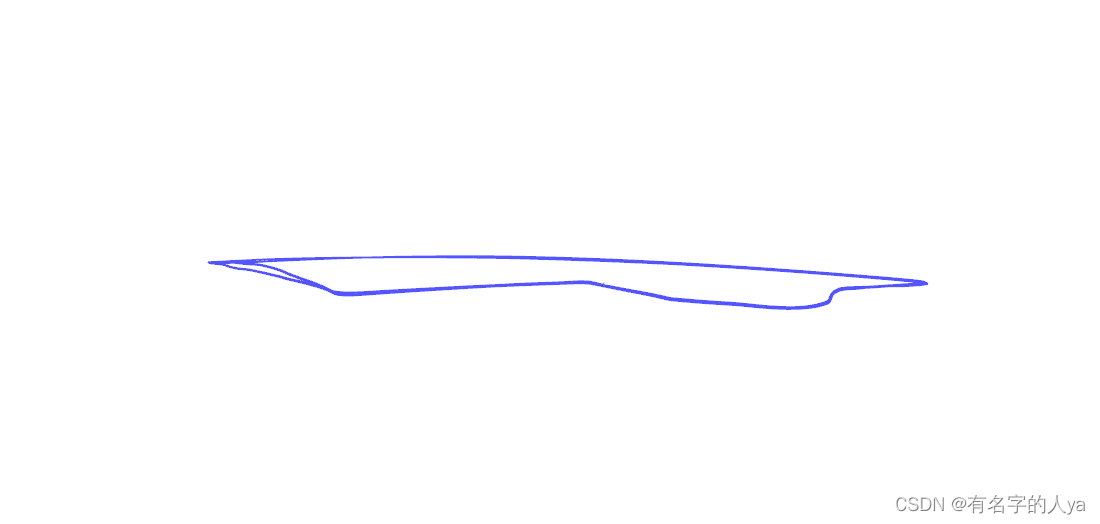
高程误差很大,IMU虽然有一定的制约,但是因为没有回环检测,因此高程误差存在,不能建立一致的地图! 但我感觉建的图特别的精细!!!

使用Livox-Mapping测试
- 针对LIO-livox代码的修改:- 可以实时进行,我的电脑也可以实时运行,阅读代码发现,中间有几个地方相较于源码,使用了多线程并发处理,加快了运行速度!- 使用SC,进行闭环检测- 添加地图保存和轨迹保存- 后处理,通过软件,能手动消除动态点云!- 因为是对livox支持,还没有适配到机械雷达上! 待修改!
- 运行数据集 around_park_2021-09-24-11-36-03.bag livox_mapping_ws
roslaunch livox_mapping livox_mapping.launch save_path:="/home/ya/livox-mapping-out"
roslaunch livox_odometry livox_odometry.launch save_path:="/home/ya/livox-mapping-out"
rosbag play anticlock_around_building_2021-12-10-15-23-45.bag
- 测试结果
能够建立全局一直的地图!!! 地图保存出错!! 可能是我保存的文件命令方式不对!
数据集采用作者提供的数据集!

使用lili-om-modify进行测试
- 测试发现,slide_window_width: 2 只能是2!
- https://github.com/KIT-ISAS/lili-om/issues/29 以及#9 出现了一样的问题!!!
- 另外在刚开始第一帧的点云有问题!! 然后路径和状态就会偏移!! 不知道哪里的问题目前! (后来发现只显示地图是没有问题的,应该是第一帧数据没有对齐呢!不算bug!)
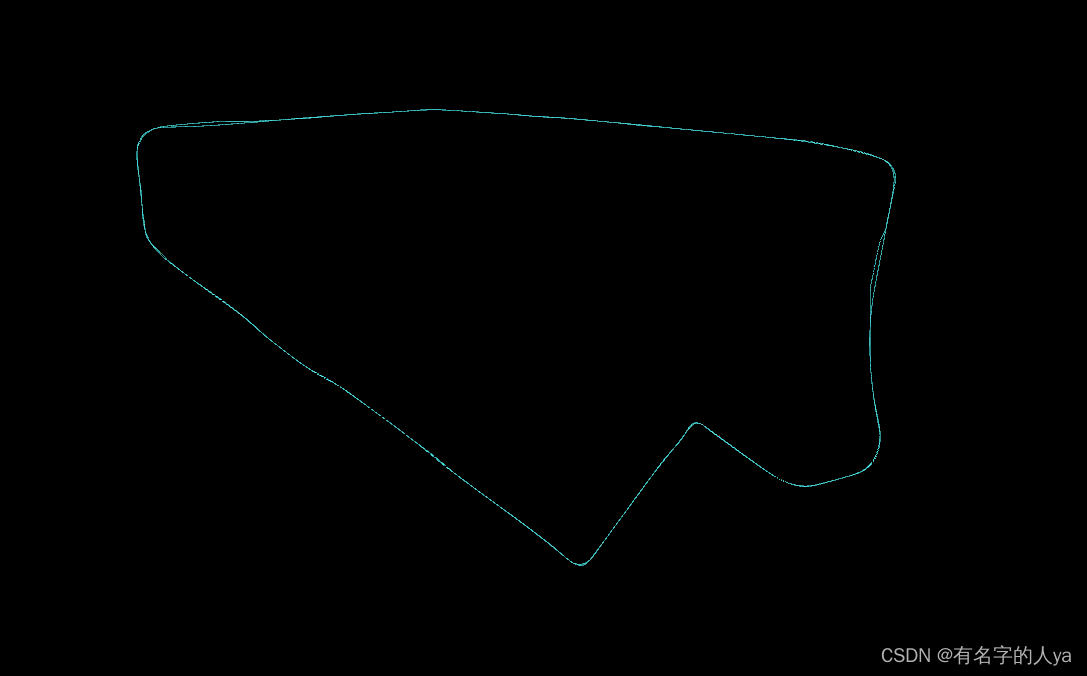
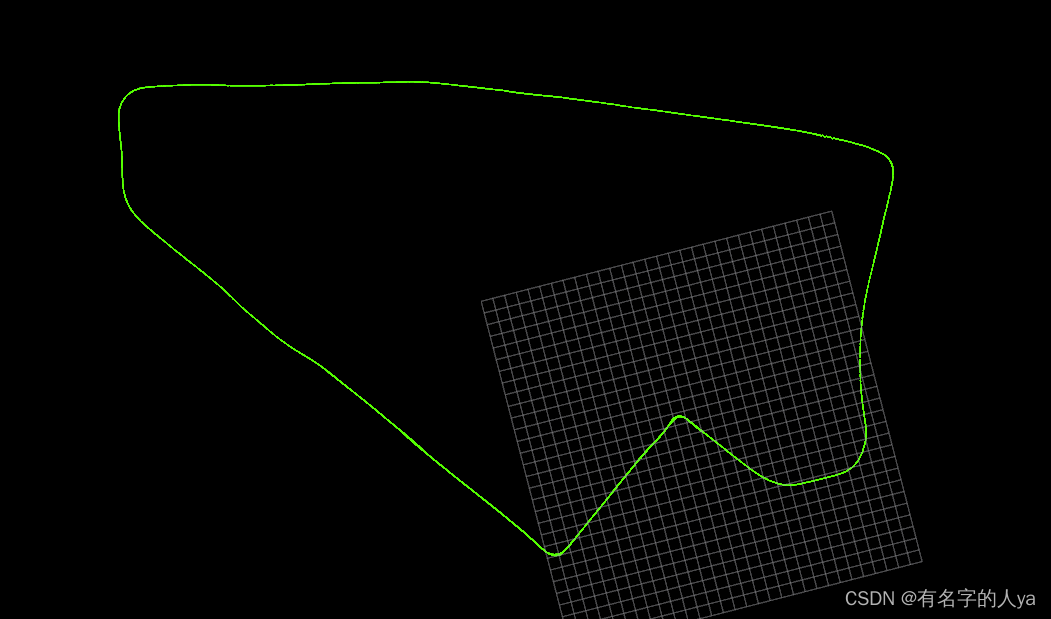
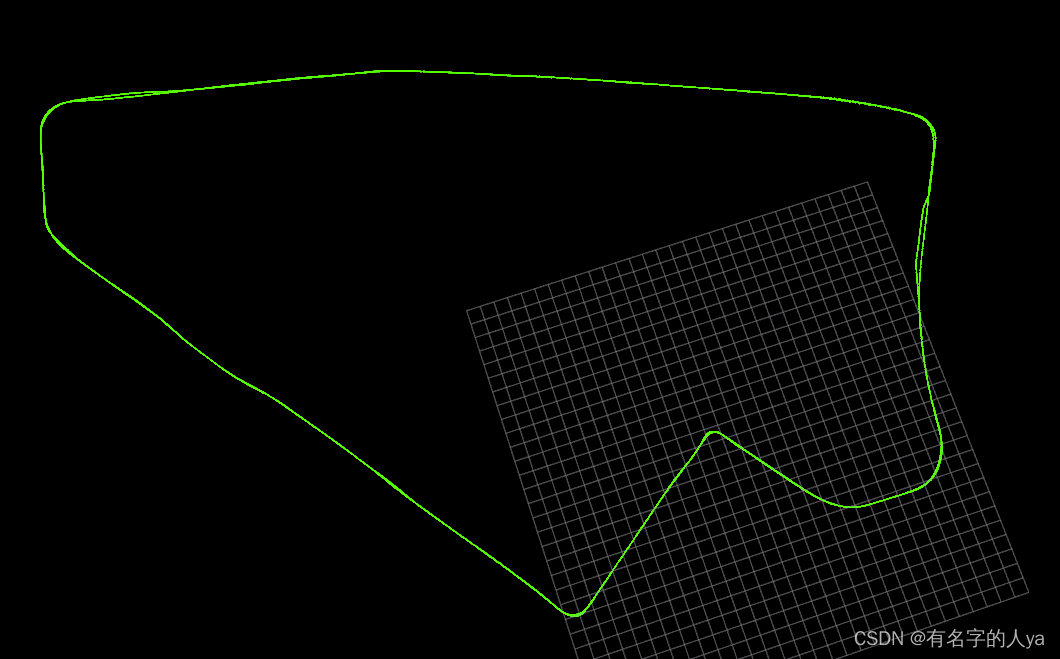
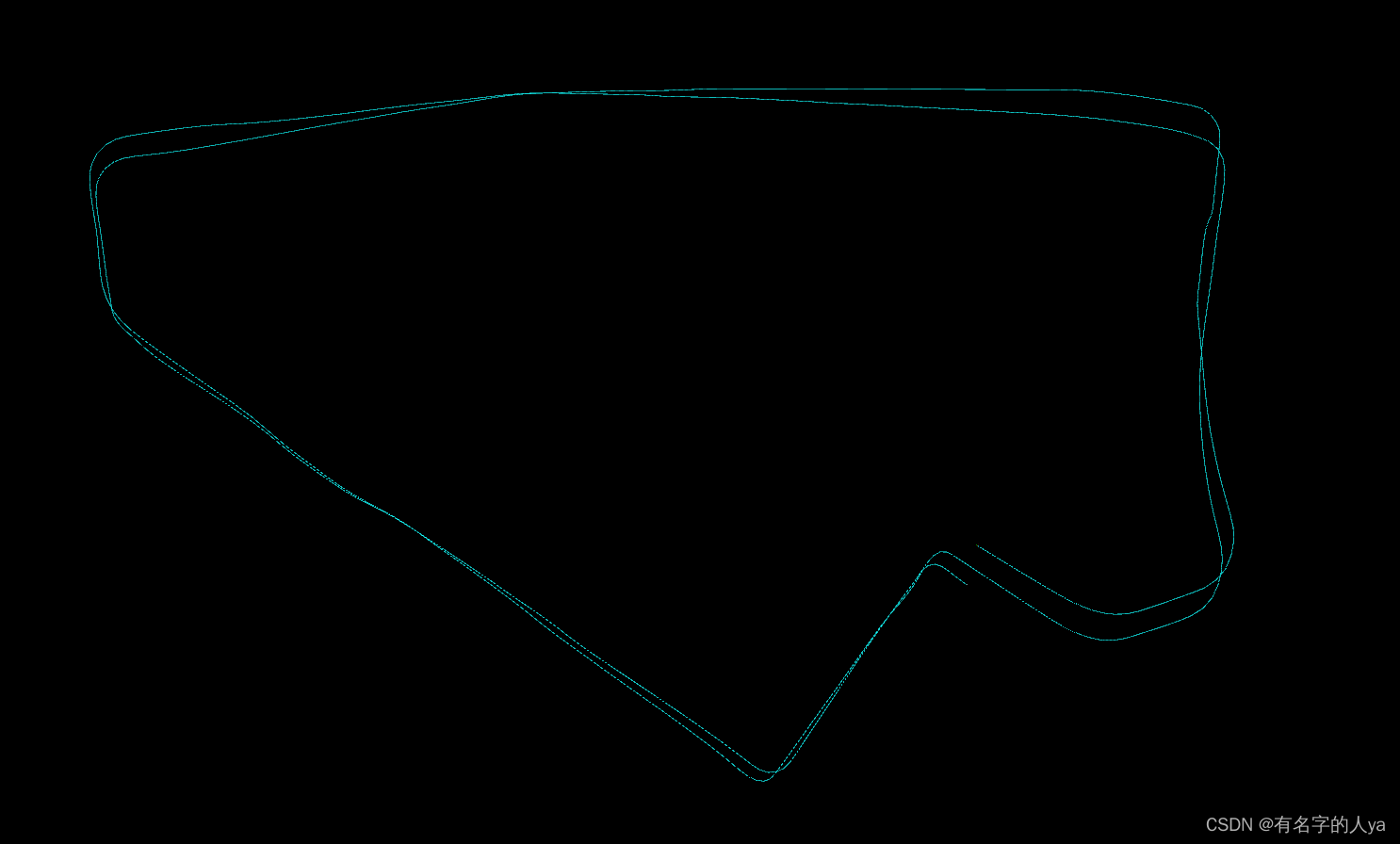
- 测试下来发现,这个的轨迹精度还是非常高的! 也能做到实时性! 回环检测带来的效果确实是比较的好! 比独立出来的SC-PGO包要好很多!
- 使用数据集urbanTST lili-om-modify_ws
roslaunch lili_om_rot run_fr_iosb.launch
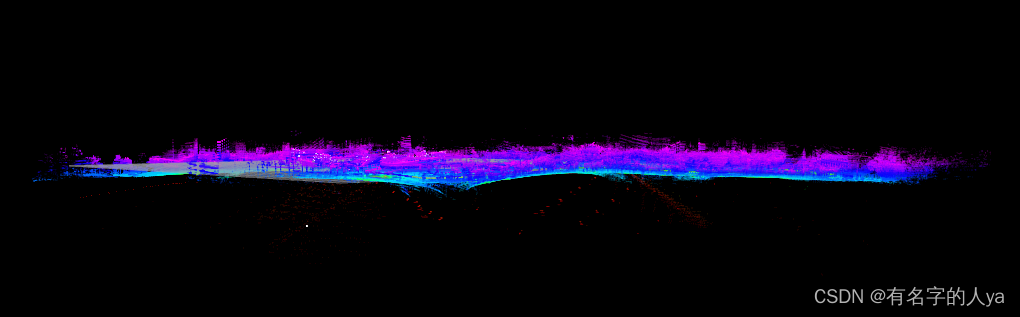

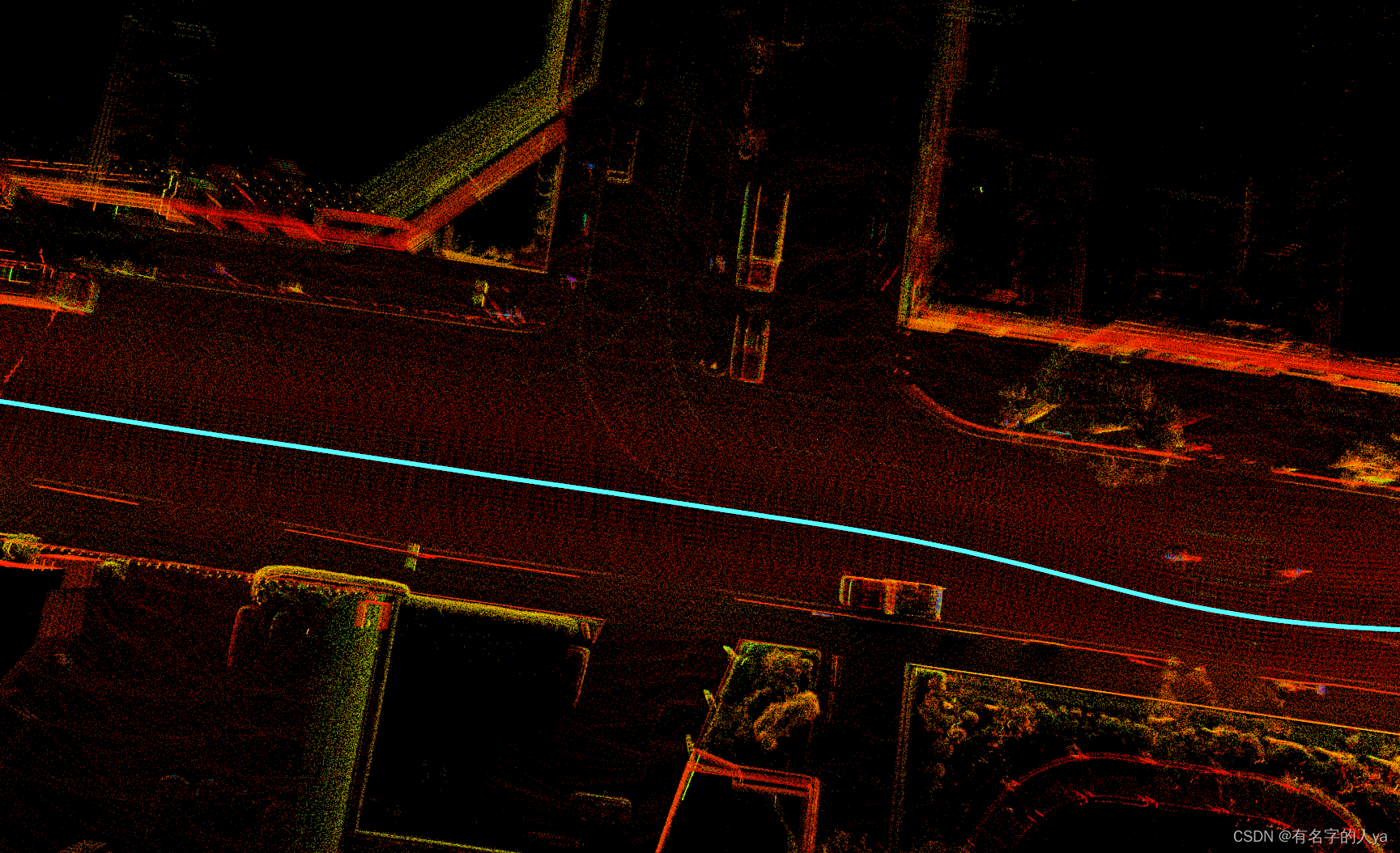
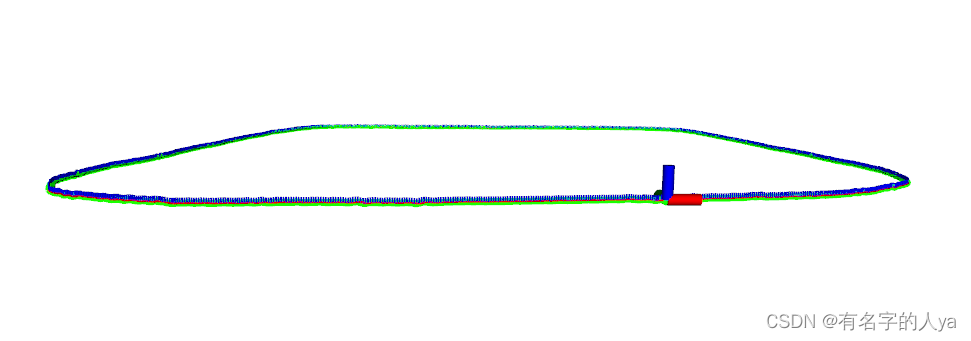
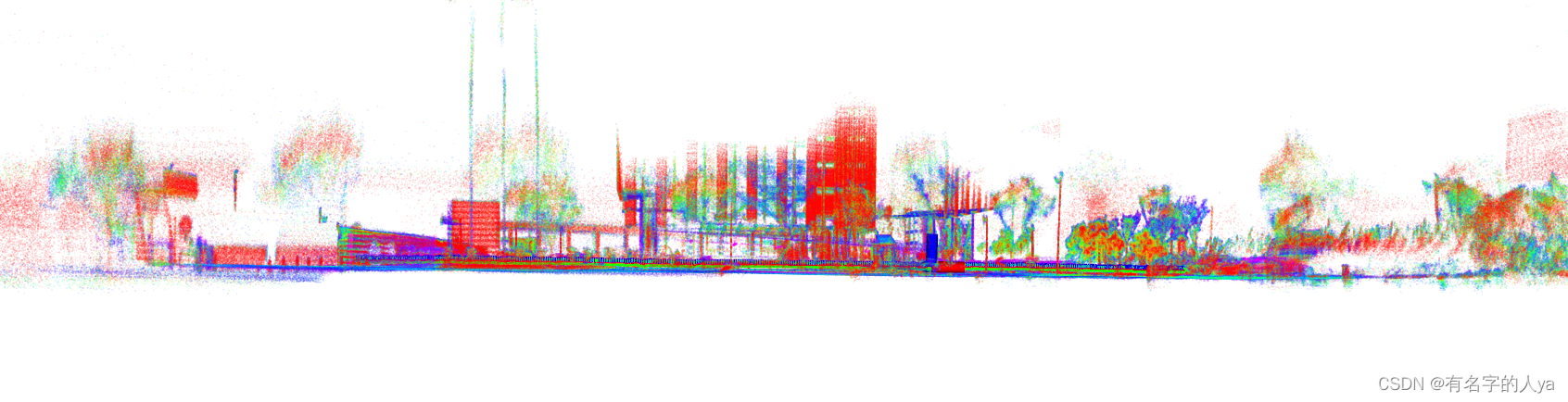
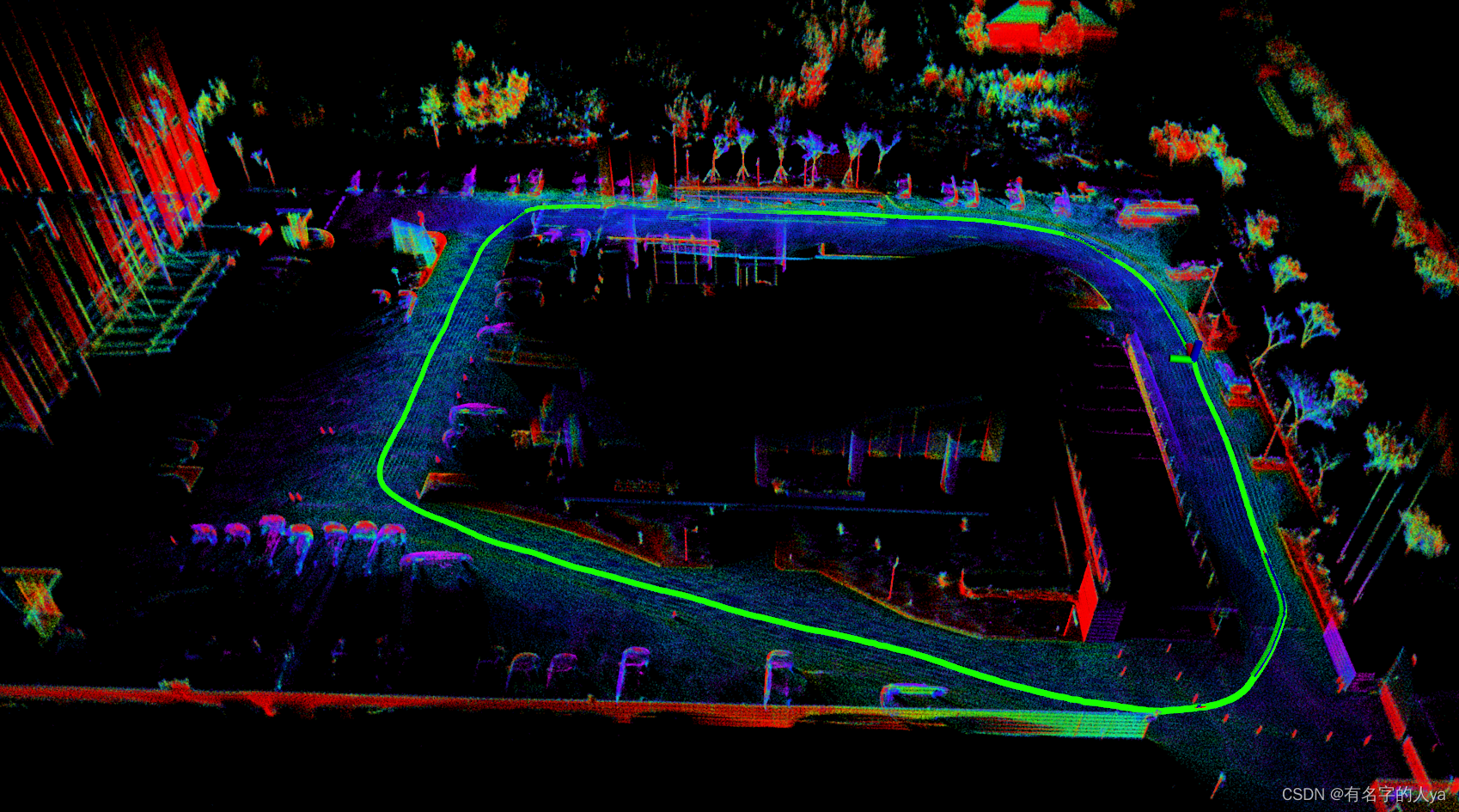
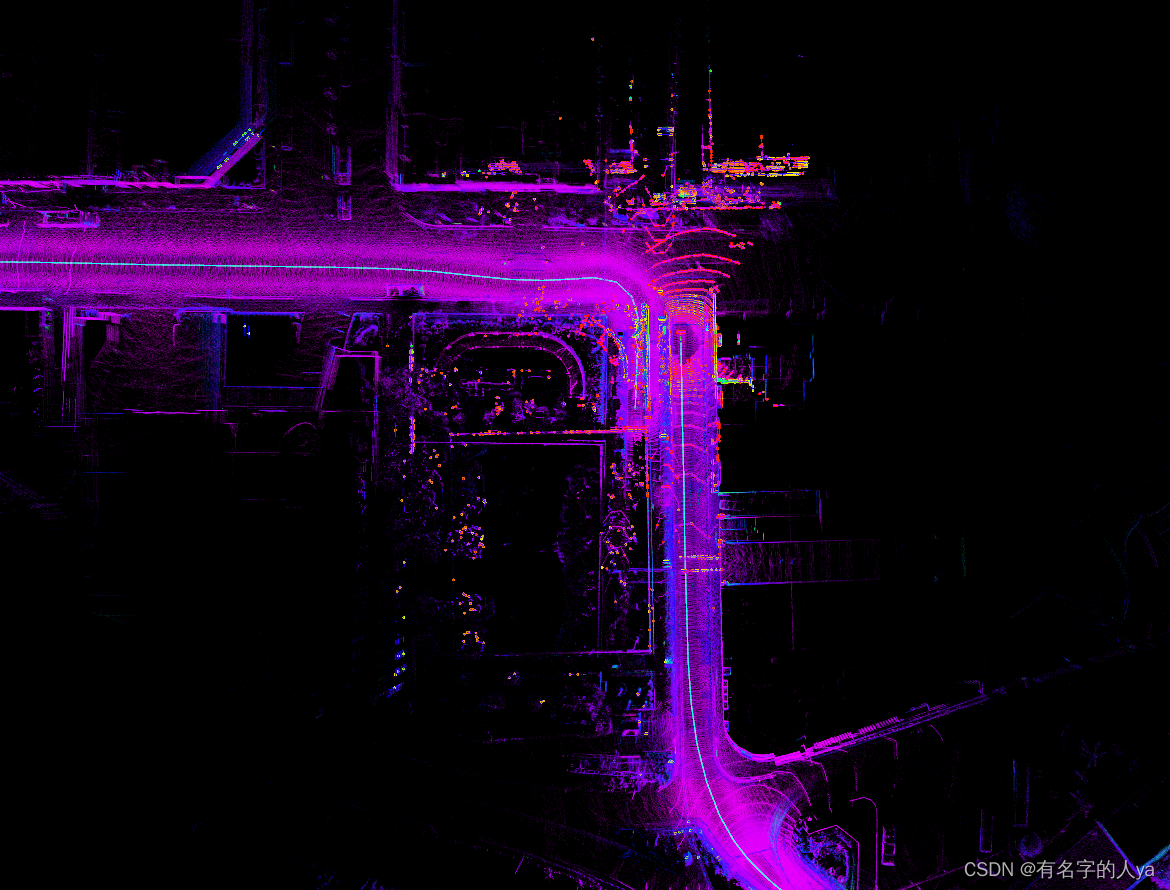
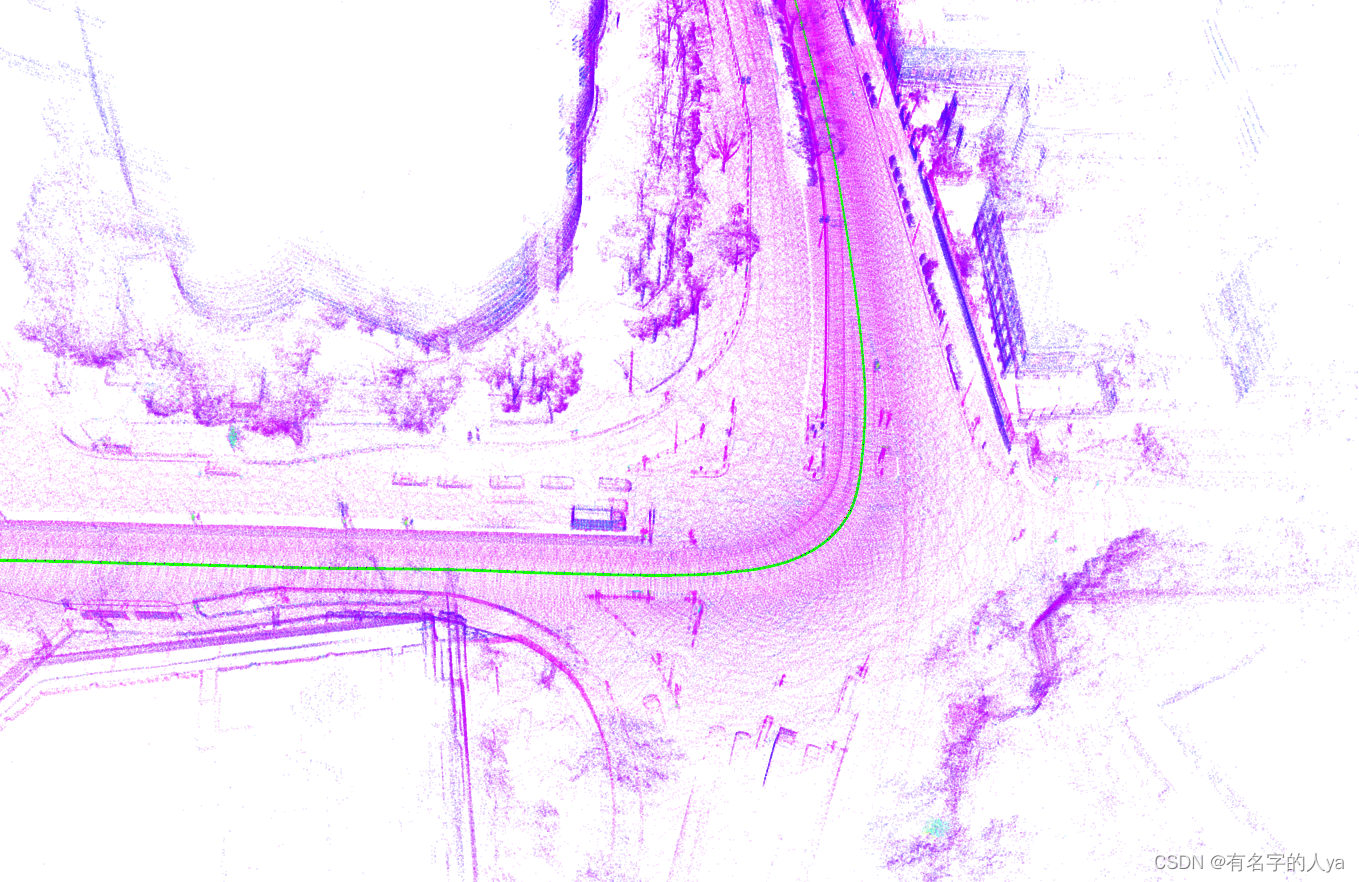
使用Fastlio2进行测试
- 使用数据集urbanTST fastlio2_ws
roslaunch fast_lio mapping_velodyne.launch
- 可以直接跑通,使用原本的launch文件,注意修改保存地图 路径显示 等参数!!
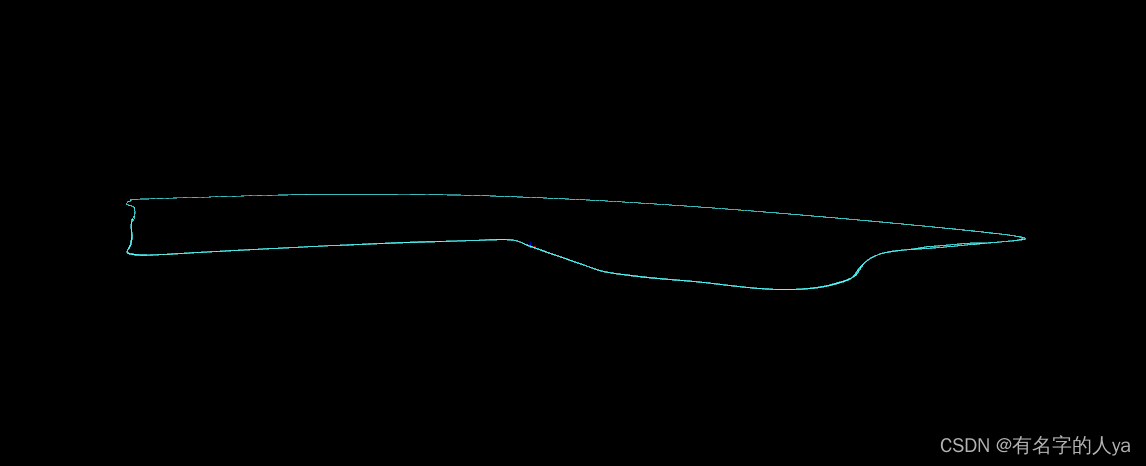
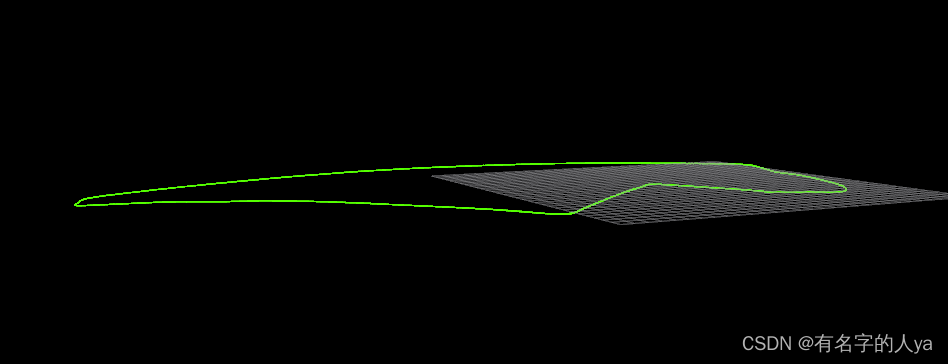
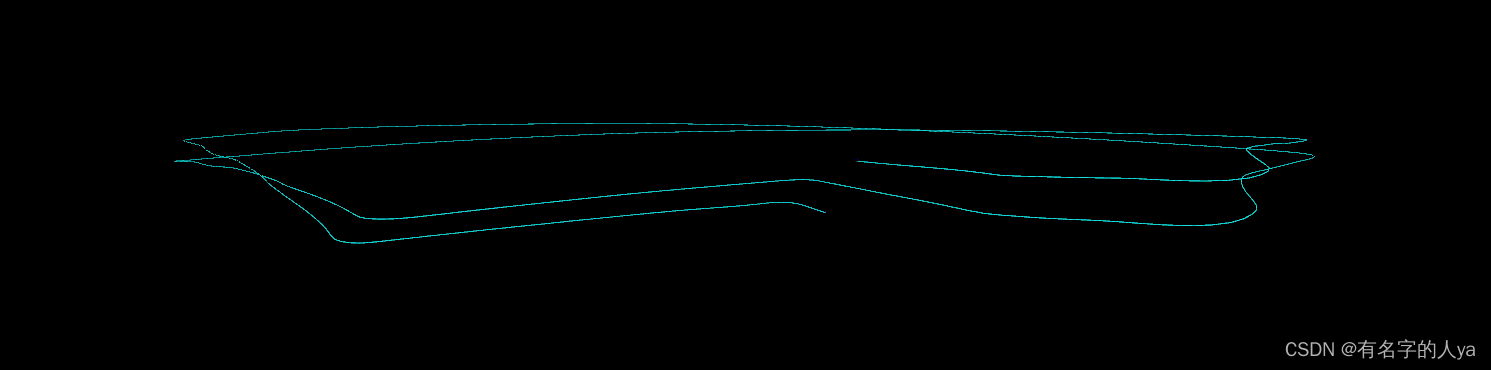
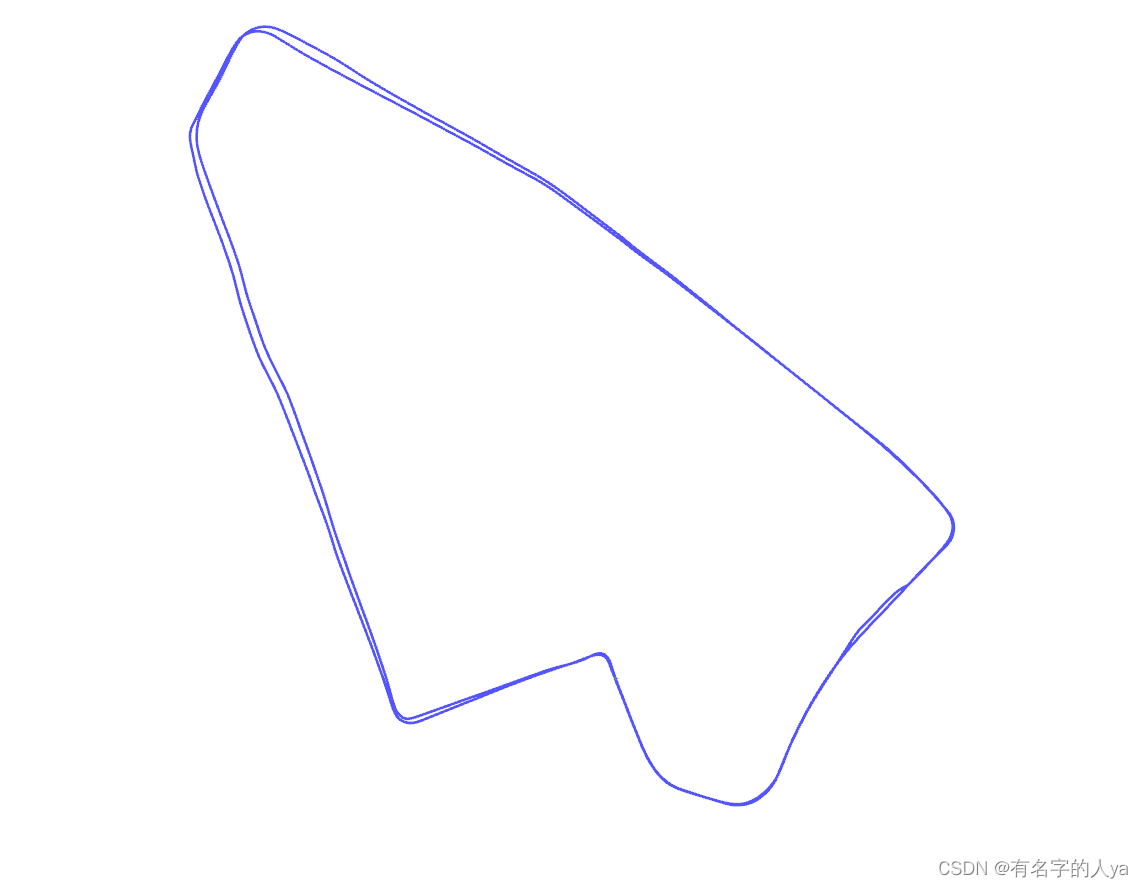
- Fast-lio2不带回环检测,因此也会导致z轴的相对漂移!!
- 刚开始的地方在转向那有些许的重影了 , 并且在转向处的轨迹不够平滑!


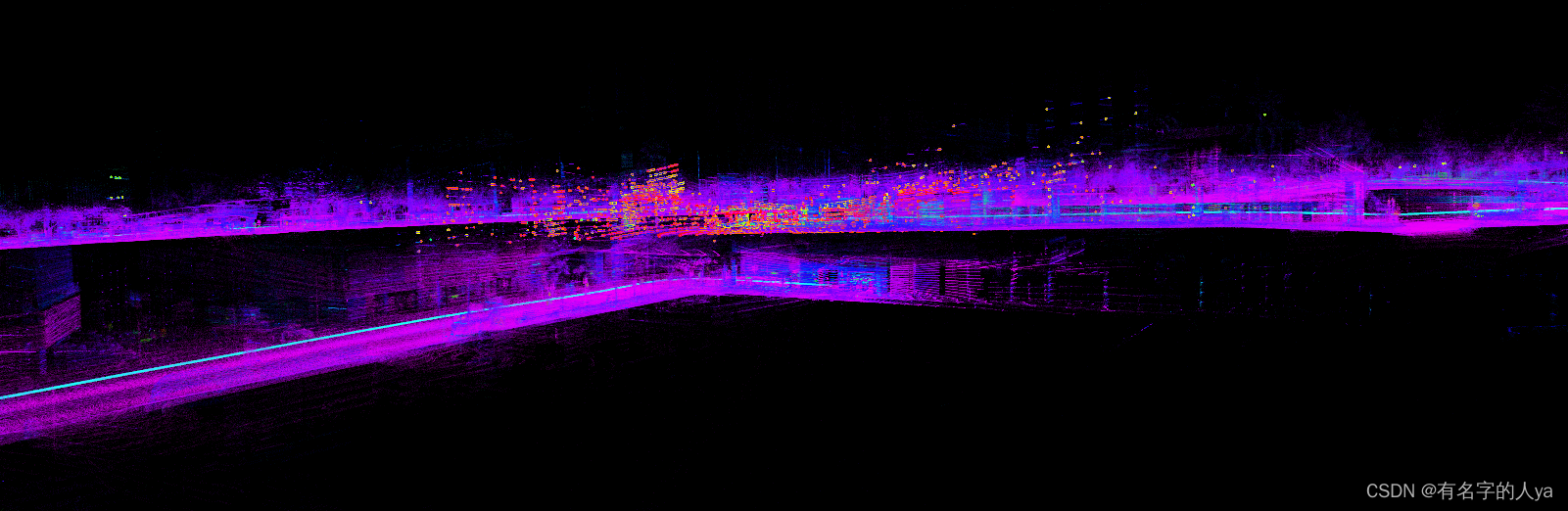


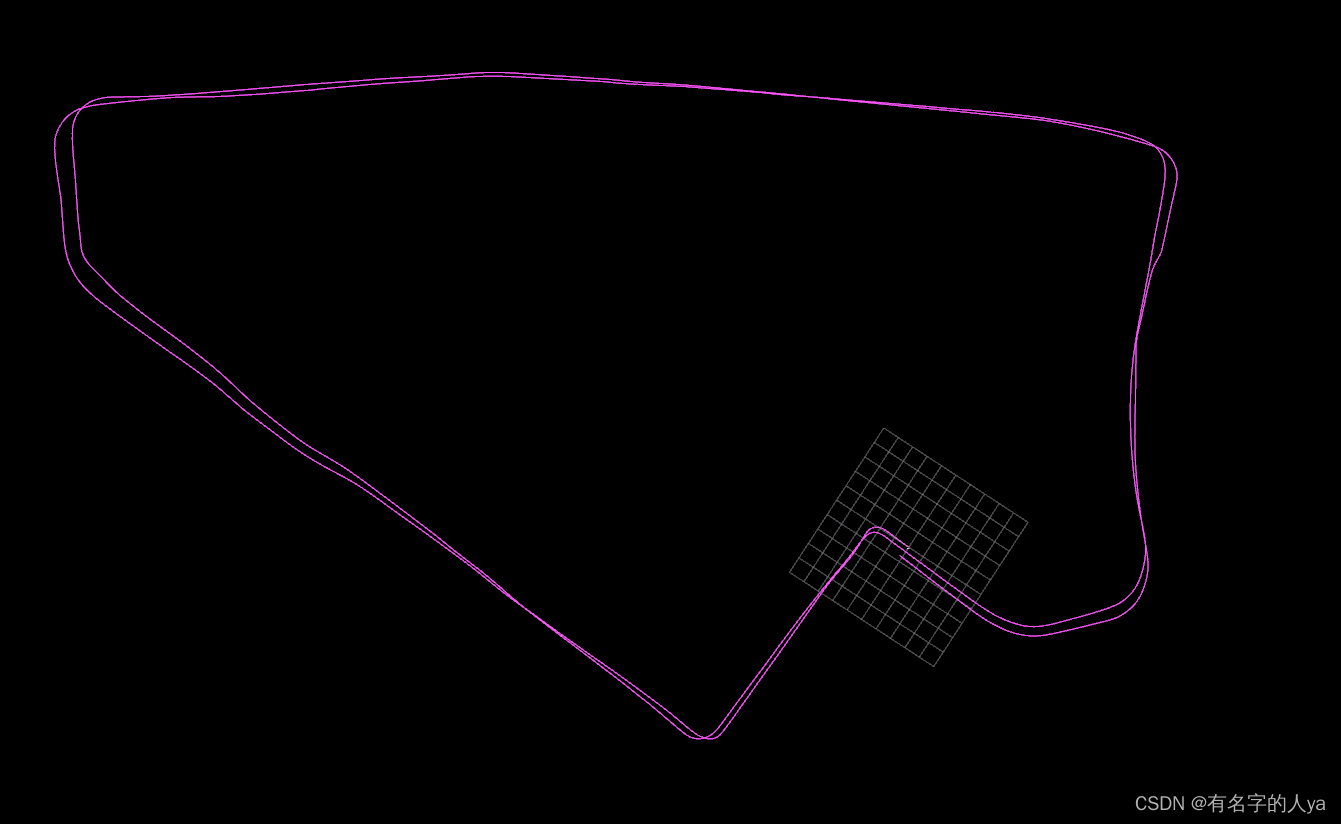
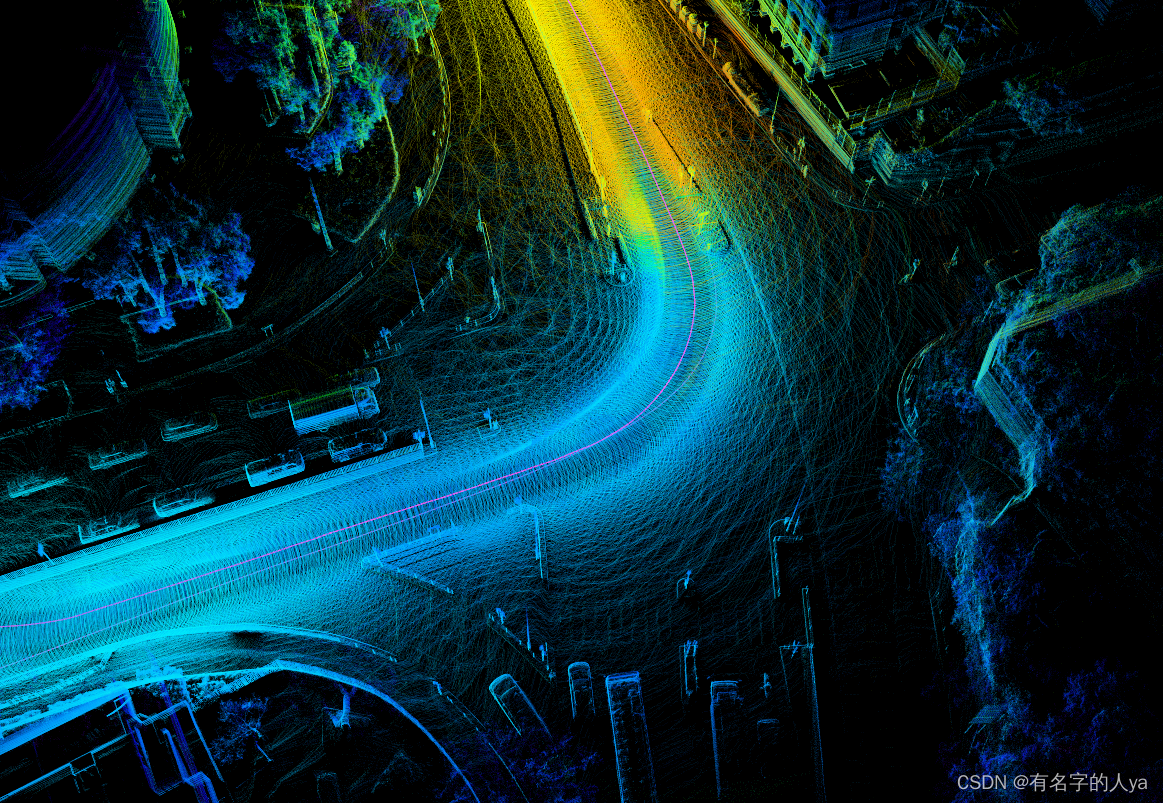
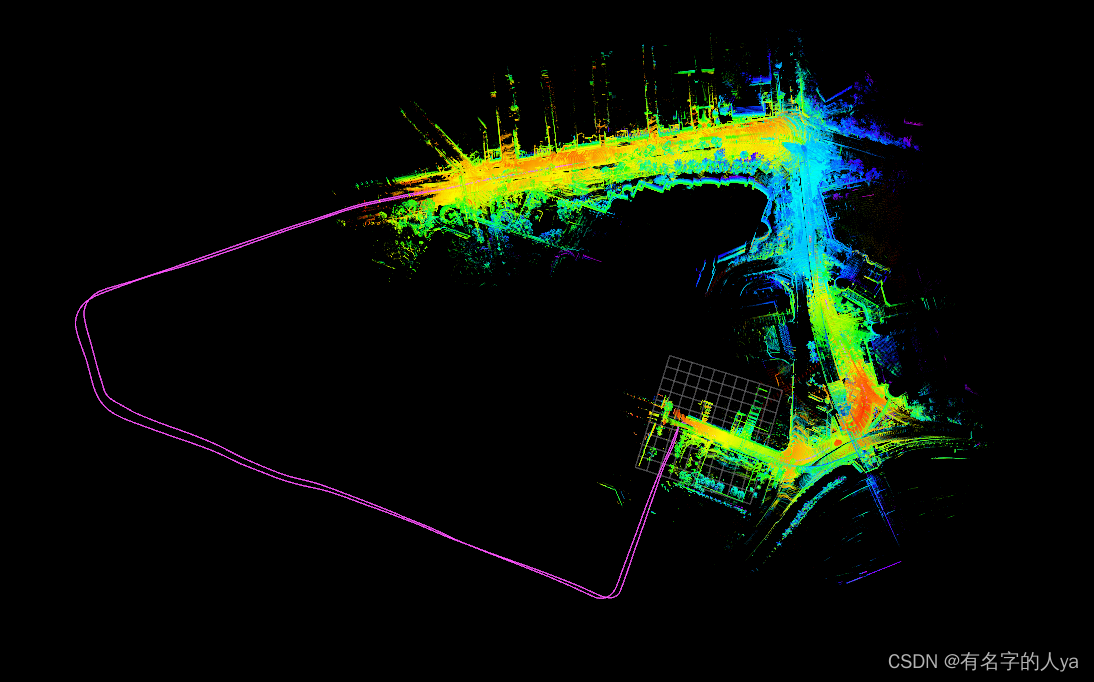
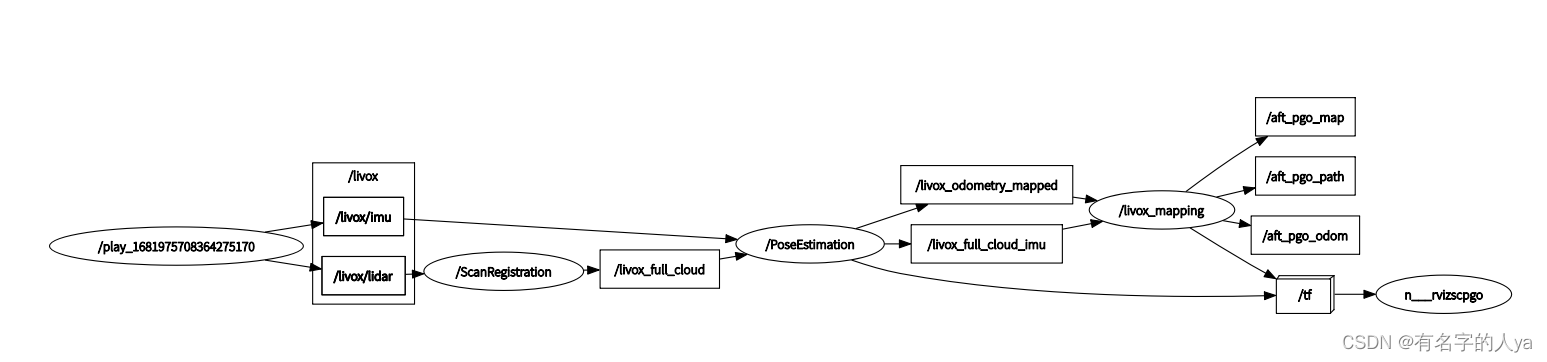
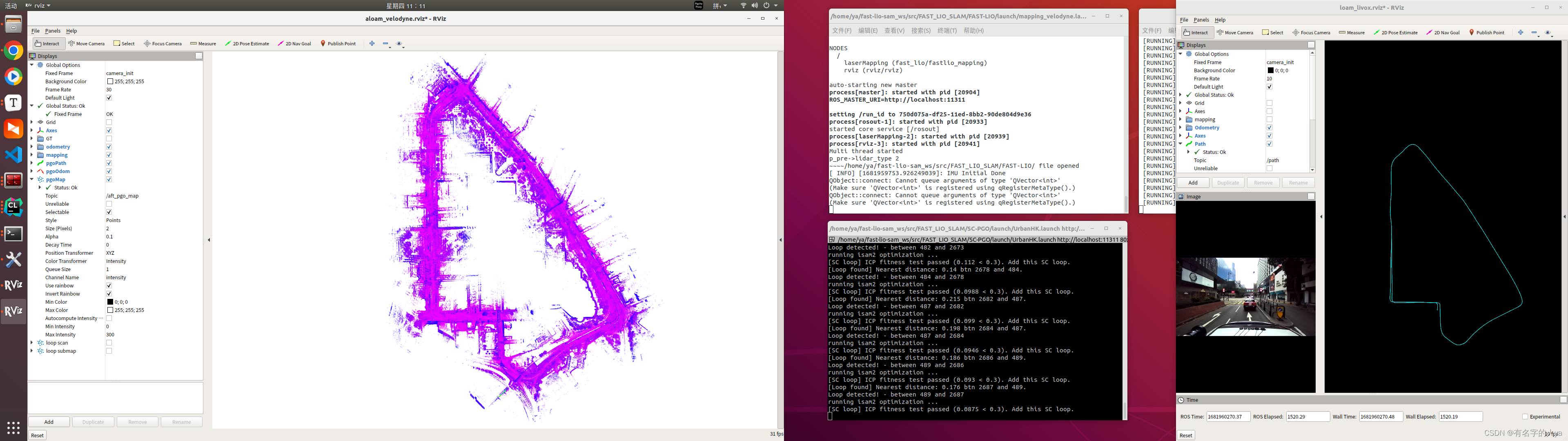
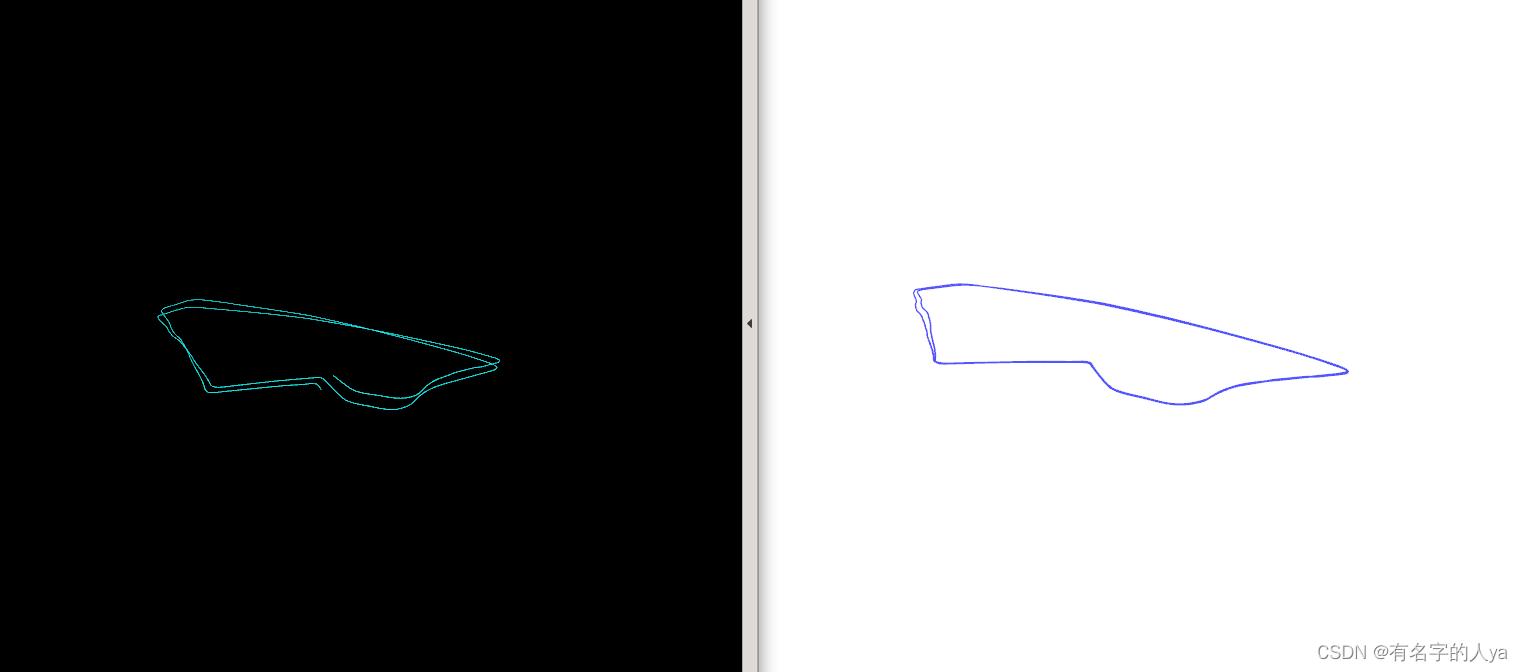
使用fastlio-slam进行测试
- 运行
# terminal 1: run FAST-LIO2
source devel/setup.bash
roslaunch fast_lio mapping_velodyne.launch # setting for UrbanHKTST dataset
# open the other terminal tab: run SC-PGO
source devel/setup.bash
roslaunch aloam_velodyne UrbanHK.launch # setting for UrbanHKTST dataset
# open the other terminal tab
# run play *.bag
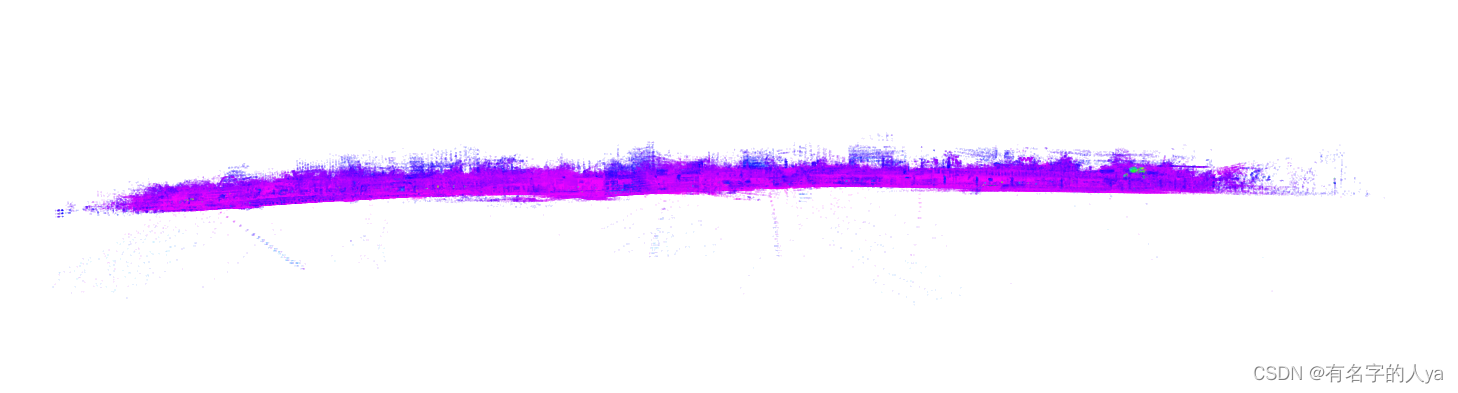
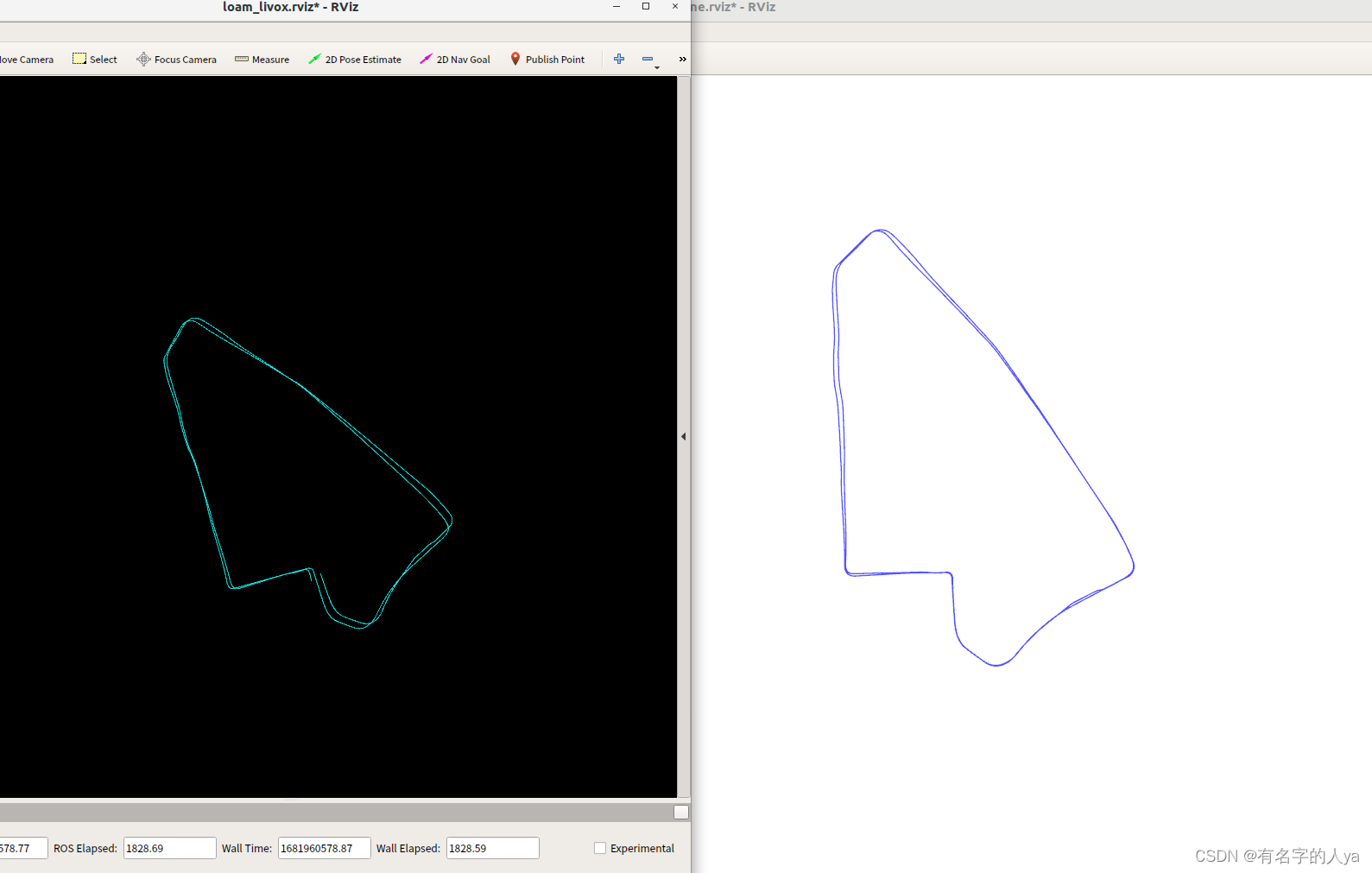
- 数据集UrbanHKTST测试结果 fast-lio-sam_ws

版权归原作者 有名字的人ya 所有, 如有侵权,请联系我们删除。