
一、R3live编译
- 下载livox-SDK,编译安装
git clone https://github.com/Livox-SDK/Livox-SDK.git
cd Livox-SDK
cd build && cmake ..
make
sudo make install
2.下载livox驱动,编译安装
cd livox_ws/src
git clone https://github.com/Livox-SDK/livox_ros_driver.git
cd ..
catkin_make
source ./devel/setup.sh
3.CGAL和pcl_viewer安装
sudo apt-get install libcgal-dev pcl-tools
4.下载r3live源码,编译安装
cd r3live_ws/src
git clone https://github.com/hku-mars/r3live.git
cd ..
catkin_make
顺利编译成功后就可以尝试运行launch文件了,我们需要将livox驱动source到环境中,所以需要从livox_ws文件夹中启动
cd livox_ws
source devel/setup.bash
cd ..
cd r3live_ws
source devel/setup.bash
roslaunch r3live r3live_bag.launch
再rosbag play你的数据集就可以了。
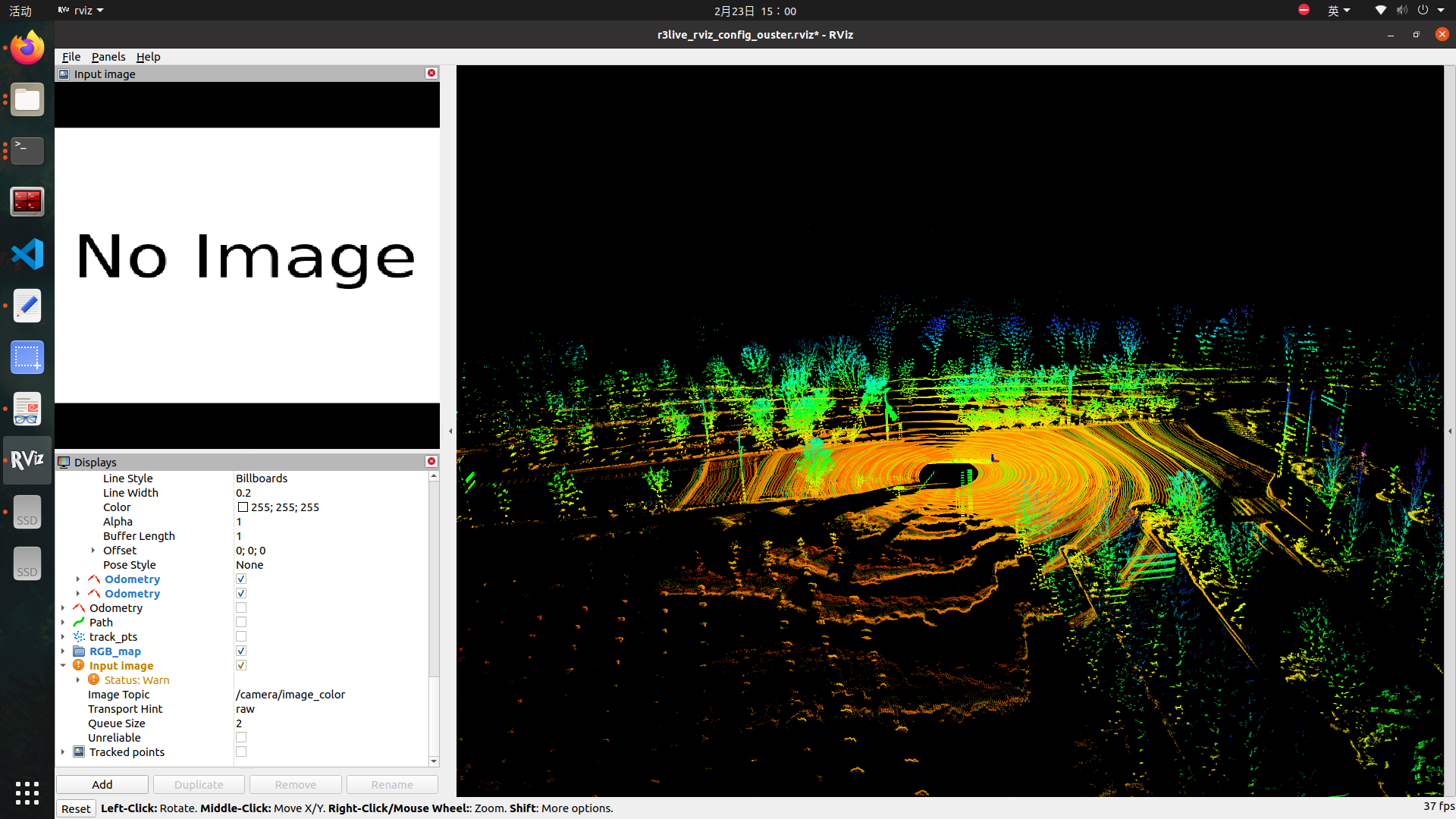
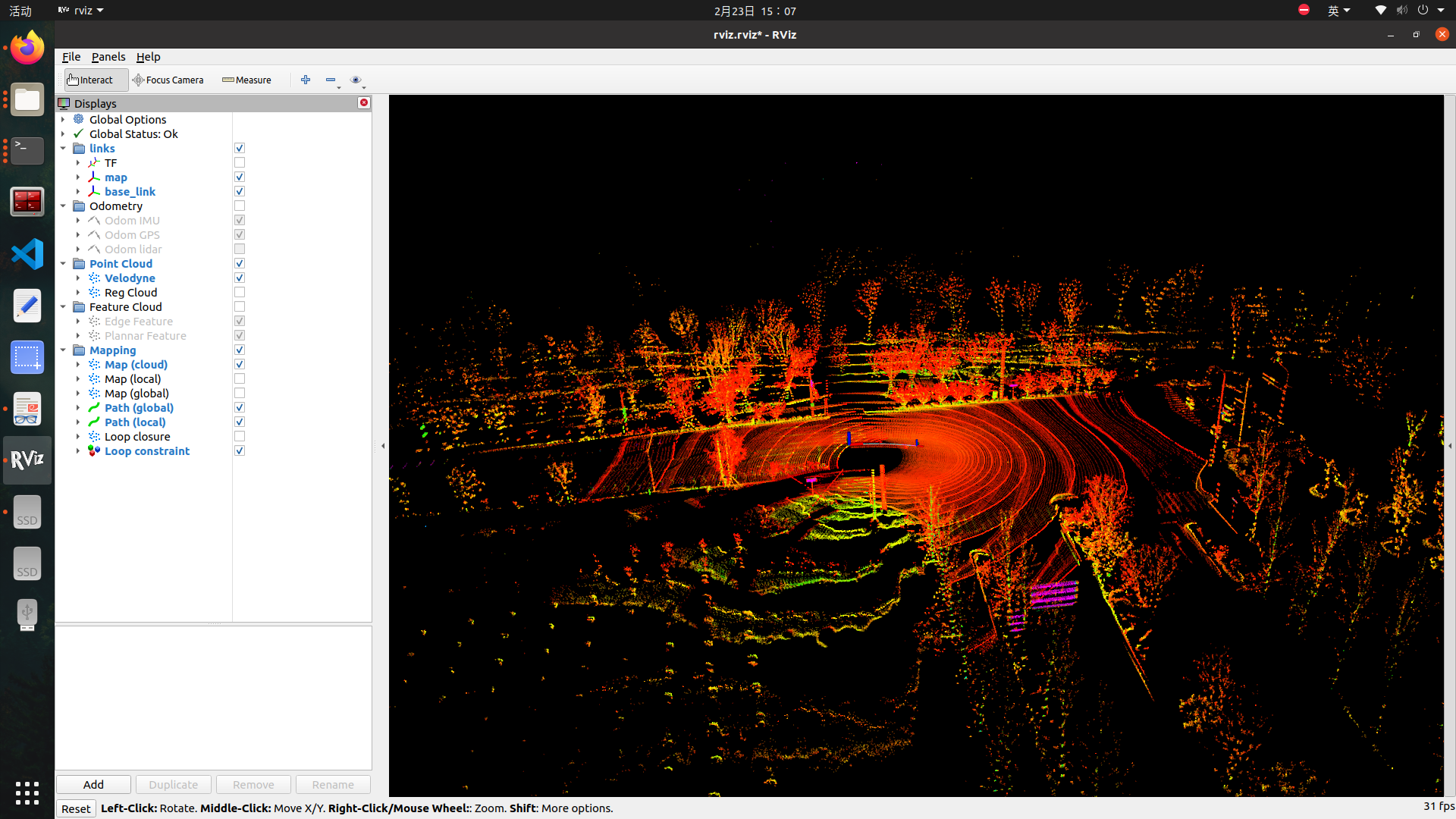
二、R3live+Velodyne
r3live一般使用的是livox固态激光雷达,在这里我尝试将其与velodyne 激光雷达进行适配,适配结果与lio-sam做了比较。(上面是r3live,下面所lio-sam效果)
引用:
香港大学R3live:手把手教你如何编译和运行_不甘平凡的平凡之人的博客-CSDN博客_r3live编译
github:
GitHub - hku-mars/r3live: A Robust, Real-time, RGB-colored, LiDAR-Inertial-Visual tightly-coupled state Estimation and mapping package
本文转载自: https://blog.csdn.net/WY110000/article/details/129021480
版权归原作者 WangYicxy 所有, 如有侵权,请联系我们删除。
版权归原作者 WangYicxy 所有, 如有侵权,请联系我们删除。