
K210的入门使用教程(Openmv同适用)
在嵌入式开发中通常会使用到视觉方面的硬件做图像识别, 经常使用的小型嵌入式图像识别硬件有个K210,Openmv等,这里介绍的是K210这款可编程机器视觉硬件,它支持一系列广泛的图像处理和神经网络,其最突出的优点是它的算力可以达到1TOPS算力,连我们的树莓派4都甘拜下风,而且它体型小巧价格亲民,目前用它来做视觉方面的项目最好的选择。

一、K210环境搭建
安装开发环境IDE不用多说,去官网下载:
http://cn.dl.sipeed.com/MAIX/MaixPy/ide/_/v0.2.4
下载好以后,用数据线将K210和电脑进行连接,打开MaixPy IDE后就是这个样子的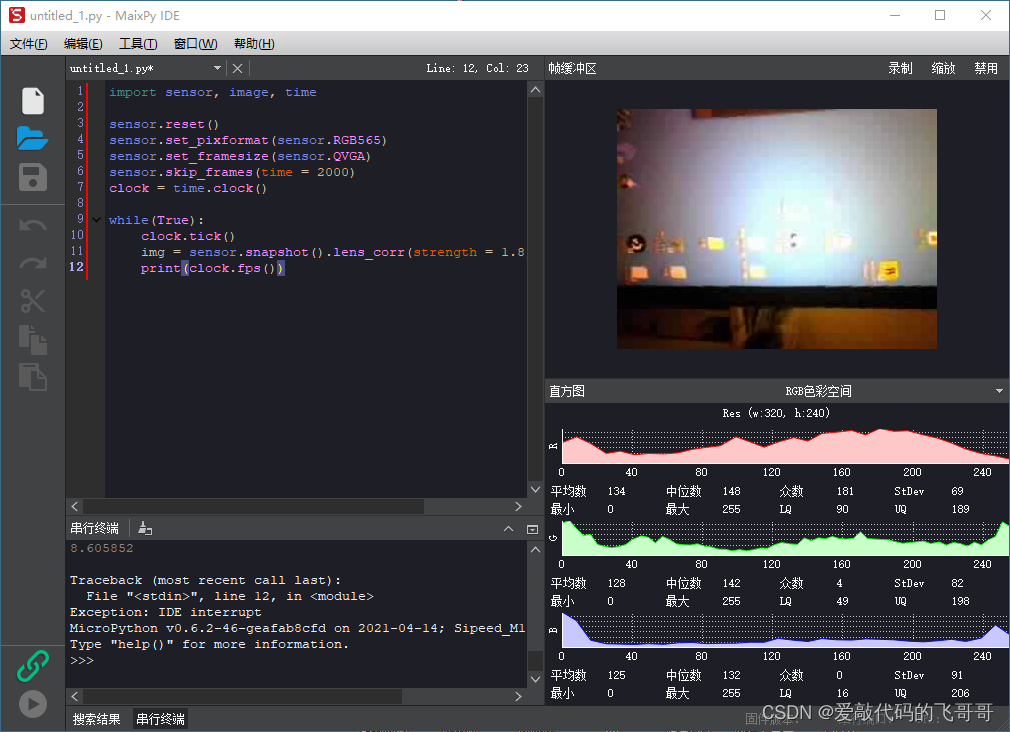
点击界面左下角的类似锁链一样的图标,这个是连接K210的
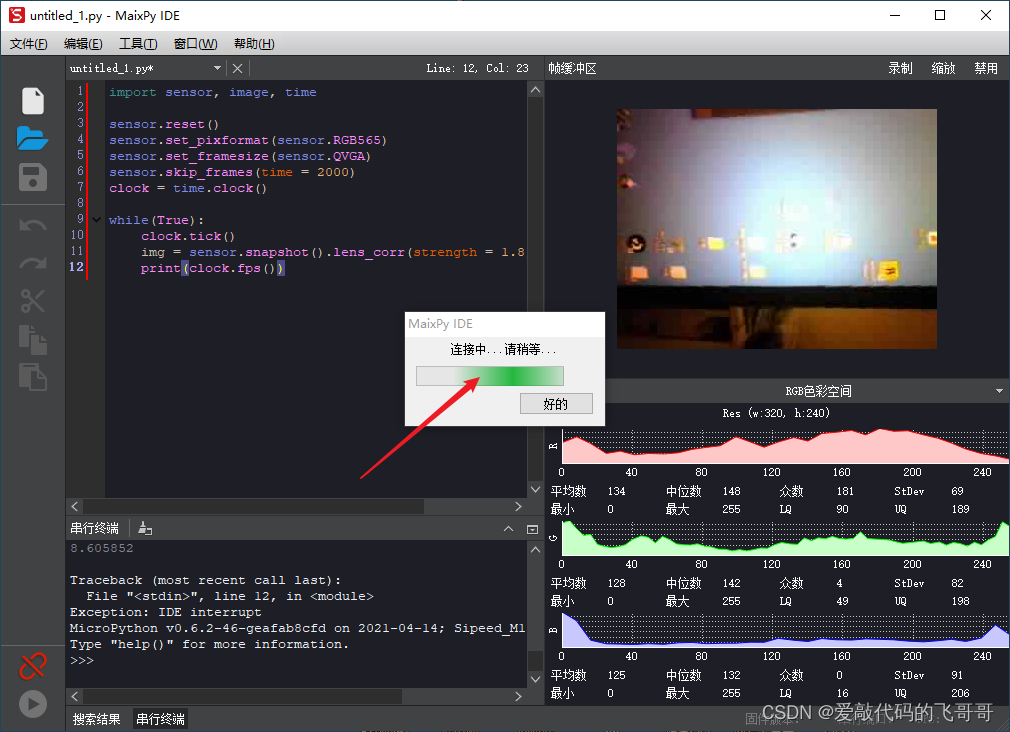
当设备连接到电脑以后,我们点击运行按钮运行IDE默认给的代码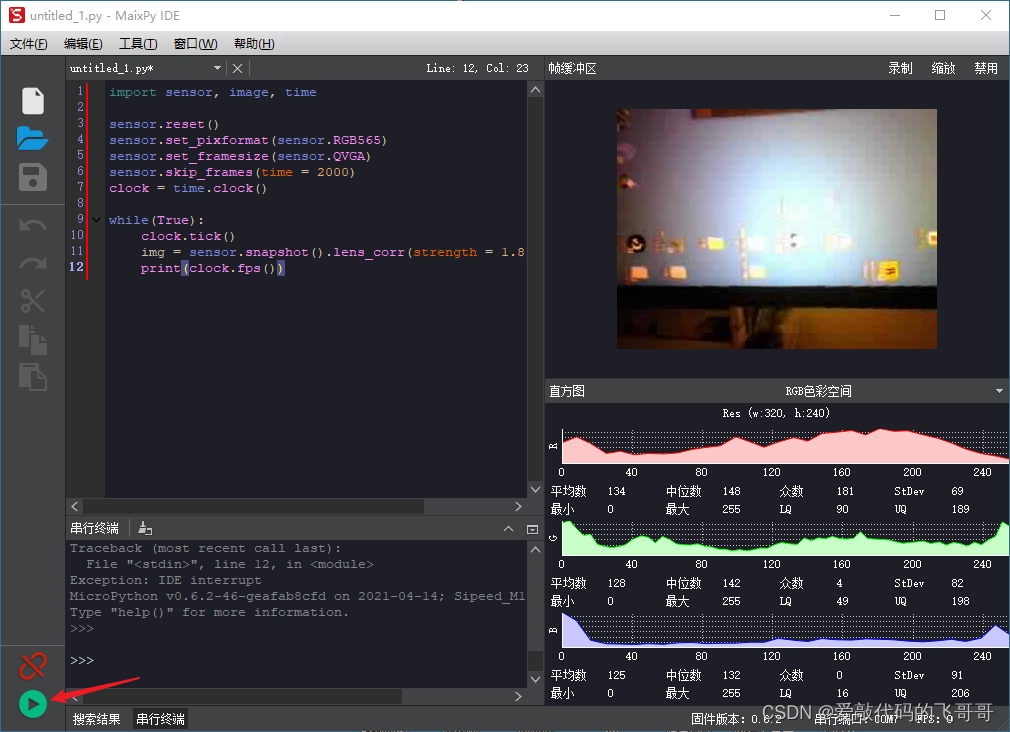
可以看到右上角的图片是实时显示,之后可以在做图像处理的时候在这个图像显示中看到一些改动。
到这里入门的大概步骤就介绍完了,可能中间有些细节没有讲得很仔细,如果上面的步骤有问题的可以的在底下留言大家一起讨论,这期主要不是将怎么使用IDE的,主要还是讲解入门所使用的代码。
基本的摄像头图像实时显示
执行摄像头识别代码,然后就可以在屏幕上看到摄像头内容了,如果提示初始化失败,可能要检查连接,或者摄像头是否损坏 这里的代码是最基础的也是最重要的,需要记住执行语句的具体意义,不需要完全记住语句,但是得知道每一句是干嘛的
import sensor, lcd
sensor.reset() # 初始化摄像头
sensor.set_pixformat(sensor.RGB565) # 设置图像格式为RGB565
sensor.set_framesize(sensor.QVGA) # 设置图像分辨率为 320x240
sensor.set_hmirror(False) # 设置左右镜像
sensor.set_vflip(False) # 设置上下翻转
sensor.run(1) # 摄像头开始运行,也可以不调用,参数设置好后会自动运行
sensor.skip_frames() # 跳过一些帧数,因为摄像头启动时图像没稳定
lcd.init(type=1, freq=15000000) # 初始化显示屏,如果颜色反色了,设置type=2
lcd.rotation(0) # 设置 LCD 显示旋转, 取值范围:[0,3]
while(True):
img = sensor.snapshot() # 从摄像头取一张图片
lcd.display(img) # 把图片显示到 LCD
畸变校正
正常使用基础代码去识别图形是会发现一个问题就是k210镜头拍摄下来的图像有的地方会畸变,对图像处理造成非常大的阻碍,下面介绍一种解决画面畸变的方法,就是在每次获取图像的那个语句后面加上一个句
img = sensor.snapshot().lens_corr(strength = 1.8, zoom = 1.0)
这样就解决画面畸变的问题了, 图像的是个角不会成曲线畸变了。
画面的对比: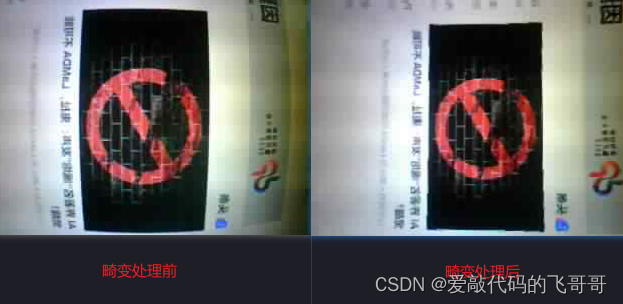
在Openmv中也同样适用,畸变处理后画面会比之前好上很多,这样在去做图像处理时就非常得心应手了。
本文转载自: https://blog.csdn.net/qq_45280030/article/details/125304130
版权归原作者 爱敲代码的飞哥哥 所有, 如有侵权,请联系我们删除。
版权归原作者 爱敲代码的飞哥哥 所有, 如有侵权,请联系我们删除。