
以下是基于webots2023b版本
1、webots控制器可以简单理解为:通过webots支持的编程语言,编写的机器人控制程序。
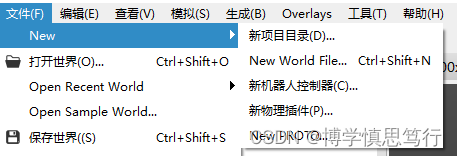
2、入口:文件->new->新机器人控制器
3、典型存放位置:
webots-project\my_project\controllers\my_controller111\my_controller111.py
4、控制器模板(以python版本为例)如下:
"""my_controller111 controller."""
# You may need to import some classes of the controller module. Ex:
# from controller import Robot, Motor, DistanceSensor
from controller import Robot
# create the Robot instance.
robot = Robot()
# get the time step of the current world.
timestep = int(robot.getBasicTimeStep())
# You should insert a getDevice-like function in order to get the
# instance of a device of the robot. Something like:
# motor = robot.getDevice('motorname')
# ds = robot.getDevice('dsname')
# ds.enable(timestep)
# Main loop:
# - perform simulation steps until Webots is stopping the controller
while robot.step(timestep) != -1:
# Read the sensors:
# Enter here functions to read sensor data, like:
# val = ds.getValue()
# Process sensor data here.
# Enter here functions to send actuator commands, like:
# motor.setPosition(10.0)
pass
# Enter here exit cleanup code.
基本编写内容如下:
①导入库或库的模块,常见的如
from controller import Robot, Motor, DistanceSensor
其它如math,time,ikpy等等
②创建机器人实例
robot = Robot()
③获取当前世界world的时间步timestep
timestep = int(robot.getBasicTimeStep())
④获取关节对象,使用getDevices,如
joint1 = robot.getDevice("joint1") # 直线轴,位置控制
joint2 = robot.getDevice("joint2") # 旋转轴1,位置控制
joint3 = robot.getDevice("joint3") # 旋转轴2,位置控制
或者
motor = robot.getDevice('motorname')
ds = robot.getDevice('dsname')
ds.enable(timestep)
⑤主循环Main loop,运行循环直到不满足条件退出循环,如:
while robot.step(timestep) != -1:
# Read the sensors:读取传感器数据
# Enter here functions to read sensor data, like:
# val = ds.getValue() 给传感器赋值
# Process sensor data here.处理传感器数据
# Enter here functions to send actuator commands, like:使用函数发送致动器指令
# motor.setPosition(10.0)
pass
Enter here exit cleanup code.
5、示例:三轴机械臂简单动作
from controller import Robot, Motor
import time
# 创建Robot对象
robot = Robot()
# 获取关节对象
joint1 = robot.getDevice("joint1") # 直线轴,位置控制
joint2 = robot.getDevice("joint2") # 旋转轴1,位置控制
joint3 = robot.getDevice("joint3") # 旋转轴2,位置控制
# 设置关节模式为位置控制
joint1.setPosition(0.0) # 初始位置,假设为0米
joint2.setPosition(0.0) # 初始位置,假设为0弧度
joint3.setPosition(0.0) # 初始位置,假设为0弧度
# 设置关节的速度,这有助于控制移动的速度
joint1.setVelocity(0.05) # 设置一个适当的速度值,单位可能是米/秒
joint2.setVelocity(0.2) # 设置一个适当的速度值,单位可能是弧度/秒
joint3.setVelocity(0.2) # 设置一个适当的速度值,单位可能是弧度/秒
# 目标位置(以米为单位,对于直线轴;以弧度为单位,对于旋转轴)
target_position_joint1 = 0.03 # 直线轴的目标位置,单位:米
target_position_joint2 = 1.57 # 旋转轴1的目标位置,单位:弧度(90度)
target_position_joint3 = 1.57 # 旋转轴2的目标位置,单位:弧度(180度)
# 主循环
while robot.step(32) != -1:
# 移动关节到目标位置
joint1.setPosition(target_position_joint1)
joint2.setPosition(target_position_joint2)
joint3.setPosition(target_position_joint3)
# 在这里,你可以添加逻辑来更新目标位置,或者根据某些条件改变它们。
# 例如,你可以从键盘输入读取新的目标位置,或者根据传感器数据调整它们。
# 等待直到关节到达目标位置(可选,取决于你的需求)
while joint1.getPosition() < target_position_joint1 - 0.01 or joint1.getPosition() > target_position_joint1 + 0.01:
time.sleep(0.1) # 短暂休眠以避免过度占用CPU
while joint2.getPosition() < target_position_joint2 - 0.01 or joint2.getPosition() > target_position_joint2 + 0.01:
time.sleep(0.1)
while joint3.getPosition() < target_position_joint3 - 0.01 or joint3.getPosition() > target_position_joint3 + 0.01:
time.sleep(0.1)
# 当仿真结束时,此循环将退出
6、思考
6.1 Q:编写webots控制器程序,除了位置控制模式,还有什么其它控制模式?
A:在Webots中,除了位置控制模式(Position Control),还有多种其他的控制模式可用于电机和传感器。以下是一些常见的控制模式:
①速度控制模式(Velocity Control): 在这种模式下,电机可以被设置为以特定的速度旋转。速度控制模式通常用于需要平滑运动的应用,如车辆的驱动轮。
WbDeviceTag motor = wb_robot_get_device("motor");
wb_motor_set_velocity(motor, velocity);
②力矩控制模式(Torque Control): 力矩控制模式允许你直接控制电机的输出力矩,而不是其位置或速度。这种模式适用于需要精确力控制的应用,如抓取操作。
wb_motor_set_torque(motor, torque);
③PWM控制模式(PWM Control): PWM(脉冲宽度调制)控制模式允许你通过改变电机供电的PWM信号的占空比来控制电机的速度和力矩。这种模式提供了对电机行为的精细控制。
wb_motor_set_pwm(motor, pwm_value);
④编码器控制模式(Encoder Control): 编码器控制模式通常用于读取电机的旋转编码器值,以便进行反馈控制或计算速度和位移。
double position = wb_motor_get_position(motor);
double velocity = wb_motor_get_velocity(motor);
⑤传感器控制模式: 对于传感器,如红外传感器、超声波传感器、触摸传感器等,通常有读取传感器原始数据的模式,然后根据这些数据进行处理和分析。
double value = wb_distance_sensor_get_value(ds);
⑥PID控制模式: 虽然Webots不直接提供PID控制模式,但你可以在你的控制器程序中实现PID算法来控制电机的位置、速度或力矩。
// 伪代码示例
double error = desired_value - current_value;
double output = Kp * error + Ki *累计_error - Kd * 误差变化率;
wb_motor_set_velocity(motor, output);
在编写Webots控制器程序时,你可以根据机器人的需求和应用场景选择最合适的控制模式。这些控制模式可以单独使用,也可以组合使用,以实现更复杂的控制策略。
6.2 如何理解和使用webots的时间步?
在Webots中,时间步(time step 或 timestep)是一个关键概念,它决定了仿真的更新频率和控制器执行循环的速率。时间步是仿真中最小的时间单位,用于同步仿真中的所有事件,包括物理引擎的更新、设备状态的读取和写入、以及控制器逻辑的执行。
理解和使用Webots的时间步,你需要知道以下几点:
- 时间步大小: 时间步通常以毫秒为单位。较小的时间步可以提供更平滑的仿真和更高的控制精度,但会增加计算负担,可能导致仿真运行缓慢。较大的时间步可以加快仿真速度,但可能会降低控制精度和仿真的真实性。
- 控制器循环: 控制器程序通常在一个循环中运行,每次迭代对应一个时间步。在每次迭代中,你可以读取传感器数据、计算控制逻辑,并发送命令给执行器。
wb_robot_step函数: 这个函数用于执行一个时间步的仿真。它接受一个参数,即时间步的大小(以毫秒为单位)。调用wb_robot_step后,Webots将更新所有设备的传感器数据,并等待指定的时间步长度,然后再返回控制权给控制器程序。- 使用时间步的示例: 以下是一个简单的Webots控制器程序示例,展示了如何使用时间步:
from controller import Robot
# 初始化机器人
robot = Robot()
# 设置时间步大小,单位为毫秒
time_step = 32
# 机器人设备初始化等
# 例如,获取电机和传感器的设备名
motor = robot.getDevice("motor")
ds = robot.getDevice("dsname")
# 确保设备不为空
assert motor and ds
# 启用距离传感器,设置时间步大小
ds.enable(time_step)
# 控制器主循环
while robot.step(time_step) != -1:
# 读取传感器数据
# 例如,获取距离传感器的值
distance = ds.value()
# 计算控制逻辑
# 这里只是一个示例,实际控制逻辑会更复杂
# ...
# 更新执行器状态
# 例如,设置电机的目标位置或速度
# motor.set_position(target_position)
# motor.set_velocity(target_velocity)
# 清理资源,Webots会自动处理,通常不需要手动清理
*在这个Python示例中,我们首先从
controller模块导入
Robot类。然后,我们创建一个
Robot实例,并设置时间步大小。在控制器的主循环中,我们使用
robot.step(time_step)来执行一个时间步的仿真,这与C版本中的
wb_robot_step(time_step)相对应。*
*请注意,Webots的Python API提供了一些方便的封装,使得代码更加简洁。例如,
robot.getDevice("motor")用于获取名为"motor"的电机设备,而
ds.value()用于获取距离传感器的值。*
在实际应用中,你需要根据你的机器人模型和需求来编写具体的控制逻辑。上面的代码只是一个基本框架,展示了如何在Python中使用Webots进行仿真控制。
** 5.性能考虑**: 如果你的控制器逻辑非常复杂,可能需要花费超过一个时间步的时间来完成。在这种情况下,你可能需要优化你的代码,或者使用更快的计算机来运行仿真。
** 6.实时仿真**: Webots支持实时仿真,这意味着仿真时间与真实世界时间同步。在实时仿真模式下,时间步的大小通常设置为1ms,以确保仿真尽可能接近实时。
通过合理设置和使用时间步,你可以有效地控制仿真的运行速度和质量,同时确保控制器逻辑的正确执行。
版权归原作者 博学慎思笃行 所有, 如有侵权,请联系我们删除。