
1.点云滤波算法
1. 前言
在获取点云数据时,由于设备精度、操作者经验、环境因素等带来的影响,点云数据中将不可避免地出现一些**噪声点**。实际应用中除了这些测量随机误差产生的噪声点之外,由于受到外界干扰如视线遮挡、障碍物等因素的影响,点云数据中往往存在着一些离主体点云较远的离散点,即**离群点**。
在点云处理流程中**滤波处理**作为预处理的第一步,往往对后续处理流程影响很大,只有在滤波预处理中将噪声点、离群点、孔洞(孔洞修复)、数据压缩(最小信息损失的海量点云数据压缩处理)等按照后续需求处理,才能够更好地进行**配准、特征提取、曲面重建、可视化**等后续流程。
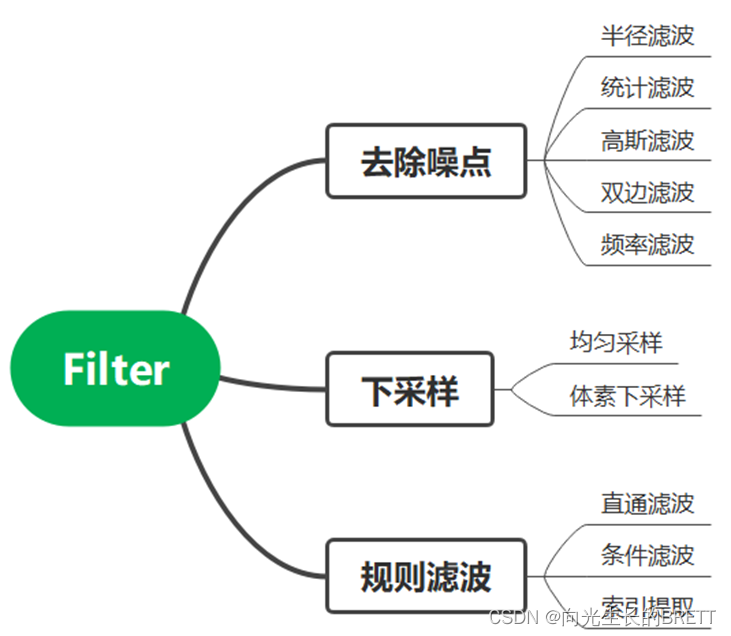
PCL 中点云滤波模块提供了很多灵活实用的滤波处理算法,例如双边滤波、高斯滤波、条件滤波、直通滤波、基于随机采样一致性滤波RANSAC等。常见的应用场景如下:
点云数据密度不规则需要平滑
因遮挡等问题噪声的离群点需要去除
数据冗余需要下采样
噪声数据需要去除
各种场景对应的滤波方法如图所示:
2. 算法介绍
注:本文所示算法主要用来理解算法处理思路,因涉及到自建库,在您的电脑上可能无法运行。
2.1 半径滤波
半径滤波以某点为中心统计给定半径内点云数量,当数量大于给定值时,则为内点,数量小于给定值则为离群点并移除。此算法运行速度快,依序迭代留下的点一定是最密集的,但是**圆的半径**和**圆内点的数目**都需要人工指定。在一定程度上可以用来筛选边缘点。
python代码:第一种为调用pcl库,第二种为根据半径滤波流程实现。第一种优点是速度快。第二种优点是参数设置自由,可以保留强度信息(因为可以返回离群值下标),而pcl和open3d都无法实现这一点,缺点是效率略低,当radius_search设置过大时效率很低。
在构建kdtree时有两种方法:pcl或者open3d,需要注意的是pcl的半径查找并未适配python,而open3d的knn和半径都可使用,因此若用knn,选pcl,若用radius,选open3d。
def radius_filter(self, radius_search, min_neighbors):
outrem = self.cloud.make_RadiusOutlierRemoval()
outrem.set_radius_search(radius_search)
outrem.set_MinNeighborsInRadius(min_neighbors)
cloud_filtered = outrem.filter()
return cloud_filtered
def radius_filter(self, radius_search, min_neighbors):
cloud = points_to_o3d(self.points[:, :3])
kdtree = o3d.geometry.KDTreeFlann(cloud)
ln = self.points.shape[0]
noise = []
for i in range(ln):
[_, inds, _] = kdtree.search_radius_vector_3d(cloud.points[i], radius_search)
if np.asarray(inds).shape[0] < min_neighbors:
noise.append(i)
cloud_filtered = np.delete(self.points, noise, axis=0)
return cloud_filtered
在程序中往往需要借助ndarray作为open3d与pcl之间转换的媒介,程序如下:
def points_to_o3d(points):
cloud_o3d = o3d.pybind.geometry.PointCloud()
cloud_o3d.points = o3d.utility.Vector3dVector(points[:, :3])
return cloud_o3d
def points_to_cloud(points):
if points.shape[1] == 3:
cloud = pcl.PointCloud()
elif points.shape[1] == 4:
cloud = pcl.PointCloud_PointXYZI()
cloud.from_array(np.asarray(points, dtype='float32'))
return cloud
2.2 统计滤波
统计滤波对每一点的邻域进行统计分析,基于点到所有邻近点的距离分布特征,过滤掉一些不满足要求的离群点。特点:主要是根据密度去除离群点,对密度差异较大的离群点去除效果较好。
实现步骤:
第一次迭代:
- 查找每一个点的k个邻域点
- 计算每个点到其邻域的距离dij,其中i = [1,...,m]表示共m个点,j = [1,...,k]每个点有k个邻域
- 根据高斯分布d~N(µ,σ)模型化距离参数,计算所有点与邻居的µ(距离的均值),σ(距离的标准差),
- 为每一个点,计算其邻域的距离均值
第二次迭代:
- 遍历所有点,如果其距离的均值大于高斯分布的指定置信度,将其标记为离群点并移除,如
python代码:仅支持XYZ
def statistical_filter(self, mean_k, mul_thresh):
fil = self.cloud.make_statistical_outlier_filter()
fil.set_mean_k(mean_k)
fil.set_std_dev_mul_thresh(mul_thresh)
cloud_filtered = fil.filter()
return cloud_filtered
2.3 高斯滤波
采用加权平均方式的一种非线性滤波器,在指定域内的权重是根据欧式距离的高斯分布,通过权重加权平均的方式得到当前点的滤波后的点。
特点:利用标准差去噪,适用于呈正态分布的数据,平滑效果较好,但是边缘角点也会被较大的平滑。
2.4 双边滤波
通过取邻近采样点的加权平均来修正当前采样点的位置,在高斯滤波器只考虑空间域点的位置基础上,增加了维度上的权重。
特点:既有效地对空间三维模型表面进行降噪,又可以保持点云数据中的几何特征信息,避免三维点云数据被过渡光滑。一定程度上 弥补了高斯滤波的缺点,但是只适用于有序点云。
2.5 频率滤波
2.5.1 算法简介
频率滤波目的是在去除点云低频信息。低频信息(例如建筑物墙面,地面)往往会对分割产生干扰,高频信息(例如建筑物窗框,路面障碍锥)往往尺度上很小,直接采用基于临近信息的滤波器会将此类信息合并至墙面或路面中。所以DoN算法利用了多尺度空间的思想。在图像处理中,高低频的概念指不同方向上图像灰度的变化,在点云处理中,定义点云法线向量差为点云所表达的信号。但对于复杂地形点云来说,没法分割近邻挨着的物体。
算法流程:
(1). 在小尺度上计算点云法线n1
(2). 在大尺度上计算点云法线n2
(3). (法线n1-法线n2)/2 -----范数控制在0~1
(4). 滤去3中值较小的点
python 代码:
def don_segment(self, threshold, radius_s, radius_l):
cloud_o3d = points_to_o3d(self.points[:, :3])
cloud_o3d.estimate_normals(search_param=o3d.geometry.KDTreeSearchParamHybrid(radius_s, self.ln))
normals = np.array(cloud_o3d.normals)
cloud_o3d.estimate_normals(search_param=o3d.geometry.KDTreeSearchParamHybrid(radius_l, self.ln))
normall = np.asarray(cloud_o3d.normals)
don = (normals - normall) / 2
removed = []
for i in range(self.ln):
mod = np.linalg.norm(don[i])
if mod < threshold:
removed.append(i)
return removed
2.5.2 参数说明
DON算法的核心在于对“小尺度”、“大尺度”、“值较小”的描述。DON算法需要两次求解点云法线(求解方法间2.5.3),两次求解法线中,分别给一较大半径和一较小半径,最大半径/最小半径的值为10时效果较好。
2.5.3 点云法线估计
点云法线估计中最简单的方法就是求以该点为圆心,给定半径内的点构成的曲面在该点的切面,该切面的法线便是该点的法线。这个问题便转化为了最小二乘平面拟合拟合。平面可以由一个点x和其法向量表示n,点到平面的距离为,在最小二乘拟合中di平均值为0。法向量的求解变为求解协方差矩阵C的特征值和特征向量。
求解流程:
遍历P内点p:
- 获得p的邻域(kdtree)
- 计算p的表面法线n
- 检查n的方向是否与视场点一致,不一致则取反。
2.6 降采样算法
均匀采样:对点云数据创建一个三维体素栅格,在每个体素保留一个最接近体素中心的点,代替体素中所有点
体素采样:对点云数据创建一个三维体素栅格,用每个体素重心近似代替体素中的其他点。特点:可以达到向下采样同时不破坏点云本身几何结构的功能,平滑点云间隔。
python代码:
def vox_down_sample(self, x, y, z):
filter_vox = self.cloud.make_voxel_grid_filter() # 体素滤波器
filter_vox.set_leaf_size(x, y, z) # 体素的大小,米
cloud_filtered = filter_vox.filter() # 滤波,得到的数据类型为点云
return cloud_filtered
def vox_down_sample_o3d(self, voxel_size):
cloud_o3d = self.cloud_to_o3d()
cloud_o3d = cloud_o3d.voxel_down_sample(voxel_size)
cloud_filtered = pcl.PointCloud()
cloud_filtered.from_array(np.asarray(cloud_o3d.points, dtype='float32'))# 滤波,得到的数据类型为点云
return cloud_filtered
PCL与open3d都可实现体素降采样,但PCL的体素降采样算法对体素大小的限制更严格,叶尺寸过小则不降采样(网格总数超过了可容纳的数值上限),解决办法是先进行直通滤波提取感兴趣区域,然后再进行PCL降采样。若仍希望较大范围的降采样,可以使用open3d。需要注意的是,这两种方法都将导致点云索引重置,导致失去点云强度(pcl可以保留)、帧数、时间戳等所有信息,因此进行处理前需权衡除XYZ外其他信息的重要性。
2.7 指定规则滤波
直通滤波:过滤掉指定维度、值域外的点。
条件滤波:通过设定滤波条件进行滤波,类似于分段函数,判断点云是否在规则的范围中,如果不在则舍弃。
索引提取:提取索引列表所对应的点构成点云。
需要注意的是,这些算法都将导致点云索引重置,导致失去点云强度(pcl可以保留)、帧数、时间戳等所有信息,因此进行处理前需权衡除XYZ外其他信息的重要性。
直通滤波python代码:
def passthrough_filter(self):
passthrough = self.cloud.make_passthrough_filter()
passthrough.set_filter_field_name("x")
passthrough.set_filter_limits(0.0, 0.1)
cloud_filtered = passthrough.filter()
return cloud_filtered
多直通滤波叠加:相对于使用条件滤波来说可以保留强度信息
def passthrough_filter(self, xl, xh, yl, yh, zl, zh):
cloud_filtered = points_to_cloud(self.points)
if xh - xl:
cloud_filtered = self._pass_axis_filter(cloud_filtered, 'x', xl, xh)
if yh - yl:
cloud_filtered = self._pass_axis_filter(cloud_filtered, 'y', yl, yh)
if zh - zl:
cloud_filtered = self._pass_axis_filter(cloud_filtered, 'z', zl, zh)
return cloud_filtered.to_array()
def _pass_axis_filter(self, cloud, axis, l, h):
passthrough = cloud.make_passthrough_filter()
passthrough.set_filter_field_name(axis)
passthrough.set_filter_limits(l, h)
cloud_filtered = passthrough.filter()
return cloud_filtered
条件滤波python代码:仅支持XYZ,无法对含强度点云的过滤
def conditional_filter(self):
range_cond = self.cloud.make_ConditionAnd()
range_cond.add_Comparison2('z', pcl.CythonCompareOp_Type.GT, 0.0)
range_cond.add_Comparison2('z', pcl.CythonCompareOp_Type.LT, 0.8)
condrem = cloud.make_ConditionalRemoval(range_cond)
condrem.set_KeepOrganized(True)
cloud_filtered = condrem.filter()
return cloud_filtered
版权归原作者 向光生长的BRETT 所有, 如有侵权,请联系我们删除。