
NCC匹配原理公式: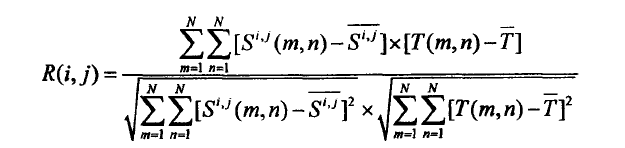
使用python代码实现NCC匹配
1.旋转使用圆投影方法来匹配
2.使用降采样加速匹配
3.差分简化运算的实现
4.gitee代码持续改进中,欢迎交流
5.微信同号,支持帮忙做付费项目(哈哈)
注意:
不支持缩放匹配,圆投影匹配目前不输出匹配角度,只是NCC匹配的初步实现,还需很多优化,目前的实现对规则矩形不旋转的匹配还是挺友好的
import math
import numpy as np
import cv2
from PyQt5.QtCore import QTime
'''
1.二维数组降维
2.圆投影匹配算法
'''
def calculate_unrotate_temp_data(temp):
####使用圆投影匹配算法####
temp_mean = np.mean(temp)
temp_sub_avg = temp - temp_mean
temp_deviation = np.vdot(temp_sub_avg, temp_sub_avg)
return temp_deviation, temp_sub_avg
def calculate_rotate_temp_data(temp):
temp_column = temp.shape[1]
temp_row = temp.shape[0]
if temp_column < temp_row:
diameter = temp_row
else:
diameter = temp_column
max_radius = math.floor(diameter / 2)
circle_center = (temp_row / 2, temp_column / 2)
circle_ring_point = {}
###统计每个点到中心的半径,并分类###
for i in range(temp_column):
for j in range(temp_row):
radius = round(np.sqrt((i - circle_center[0]) ** 2 + (j - circle_center[1]) ** 2))
if radius > max_radius:
continue
if radius in circle_ring_point.keys():
circle_ring_point[radius].append(j * temp_column + i)
else:
circle_ring_point[radius] = [j * temp_column + i]
###排序获取每个环上的点###
circle_ring_point = sorted(circle_ring_point.items(), key=lambda item: item[0])
circular_projection_data = []
for item in circle_ring_point:
circular_projection_data.append(np.array(item[1]))
_circle_sum = []
_temp = temp.reshape(1, -1)[0]
for item in circular_projection_data:
_circle_sum.append(np.sum(_temp[item]))
_circle_sum = np.array(_circle_sum)
_mean = np.mean(_circle_sum)
_deviation_array = _circle_sum - _mean
_deviation = np.dot(_deviation_array, _deviation_array)
tempData = {'deviation': _deviation, 'deviation_array': _deviation_array,
'circular_projection_data': circular_projection_data, 'temp_size': temp.shape}
return tempData
def generate_temp_data(temp, downsamplingtime=0, is_rotate=False):
######每次从原图开始取样#############
temp_downsampling_data = []
temp_downsampling_img = []
###generate downsampling img###
temp_downsampling_img.append(temp)
for i in range(downsamplingtime):
temp_downsampling_img.append(cv2.pyrDown(temp_downsampling_img[i]))
###generate downsampling data###
for temp_img in temp_downsampling_img:
if is_rotate:
temp_downsampling_data.append(calculate_rotate_temp_data(temp_img))
else:
temp_downsampling_data.append(
{'deviation': (calculate_unrotate_temp_data(temp_img))[0],
'sub_avg': (calculate_unrotate_temp_data(temp_img))[1]})
return temp_downsampling_data
def ncc_unrotate_match(src, temp_data, threshold=0.5, match_region=None):
temp_deviation, temp_sub_avg = temp_data['deviation'], temp_data['sub_avg']
temp_row_num = temp_sub_avg.shape[0]
temp_column_num = temp_sub_avg.shape[1]
_line_start = 0
_column_start = 0
_line_range = src.shape[0] - temp_row_num + 1
_column_range = src.shape[1] - temp_column_num + 1
if match_region is not None:
_line_start = match_region[1]
_column_start = match_region[0]
_line_range = match_region[1] + match_region[3] + 1
_column_range = match_region[0] + match_region[2] + 1
if _line_range > src.shape[0] - temp_row_num + 1:
_line_range = src.shape[0] - temp_row_num + 1
if _column_range > src.shape[1] - temp_column_num + 1:
_column_range = src.shape[1] - temp_column_num + 1
src_integration = cv2.integral(src)
pixel_num = temp_sub_avg.size
match_points = []
for i in range(_line_start, _line_range, 1):
for j in range(_column_start, _column_range, 1):
src_mean = (src_integration[i + temp_row_num][j + temp_column_num] +
src_integration[i][j] -
src_integration[i][j + temp_column_num] -
src_integration[i + temp_row_num][
j]) / pixel_num
_src_deviation = src[i:i + temp_row_num, j:j + temp_column_num] - src_mean
src_deviation = np.vdot(_src_deviation, _src_deviation)
ncc_numerator = np.vdot(temp_sub_avg, _src_deviation)
ncc_denominator = np.sqrt(temp_deviation * src_deviation)
ncc_value = ncc_numerator / ncc_denominator
if ncc_value > threshold:
match_point = {'match_score': ncc_value, 'point': (j, i)}
match_points.append(match_point)
return match_points
def ncc_rotate_match(src, tempData, threshold=0.5, angle_start=0, angle_end=360, angle_step=1, match_region=None):
temp_deviation = tempData['deviation']
temp_deviation_array = tempData['deviation_array']
circular_projection_data = tempData['circular_projection_data']
temp_row_num, temp_column_num = tempData['temp_size'][0], tempData['temp_size'][1]
_line_start, _column_start, _line_range, _column_range = 0, 0, src.shape[0] - temp_row_num, src.shape[
1] - temp_column_num
if match_region is not None:
_line_start = match_region[1]
_column_start = match_region[0]
_line_range = match_region[1] + match_region[3] + 1
_column_range = match_region[0] + match_region[2] + 1
if _line_range > src.shape[0] - temp_row_num + 1:
_line_range = src.shape[0] - temp_row_num + 1
if _column_range > src.shape[1] - temp_column_num + 1:
_column_range = src.shape[1] - temp_column_num + 1
match_points = []
for i in range(_line_start, _line_range, 1):
for j in range(_column_start, _column_range, 1):
_src = src[i:i + temp_row_num, j:j + temp_column_num].reshape(1, -1)[0]
src_sum = []
for item in circular_projection_data:
src_sum.append(np.sum(_src[item]))
_src_sum = np.array(src_sum)
src_mean = np.mean(_src_sum)
src_deviation_array = _src_sum - src_mean
ncc_numerator = np.vdot(src_deviation_array, temp_deviation_array)
src_deviation = np.dot(src_deviation_array, src_deviation_array)
ncc_denominator = np.sqrt(temp_deviation * src_deviation)
ncc_value = ncc_numerator / ncc_denominator
if ncc_value > threshold:
match_point = {'match_score': ncc_value, 'point': (j, i)}
match_points.append(match_point)
return match_points
def ncc_match(src, temp, is_rotate=False, downsamplingtime=0, threshold=0.7, angle_start=0, angle_end=0,
match_region=None):
assert temp.shape[0] <= src.shape[0] and temp.shape[1] <= src.shape[1]
temp_downsampling_data = generate_temp_data(temp, downsamplingtime, is_rotate)
src_down_sampling_array = []
src_down_sampling_array.append(src)
for i in range(1, downsamplingtime + 1):
src_down_sampling_array.append(cv2.pyrDown(src_down_sampling_array[i - 1]))
match_points = []
downsample_match_point = None
for i in range(downsamplingtime, -1, -1):
match_offset = 2 ** (i + 1)
if i == downsamplingtime:
match_region = [0, 0, src_down_sampling_array[i].shape[1], src_down_sampling_array[i].shape[0]]
else:
_x, _y, _w, _h = 0, 0, 0, 0
if downsample_match_point[0] * 2 - match_offset >= 0:
_x = downsample_match_point[0] * 2 - match_offset
_w = match_offset * 2 + 1
else:
_x = 0
_w = match_offset + 1
if downsample_match_point[1] * 2 - match_offset >= 0:
_y = downsample_match_point[1] * 2 - match_offset
_h = match_offset * 2 + 1
else:
_y = 0
_h = match_offset + 1
match_region = [_x, _y, _w, _h]
if not is_rotate:
_match_points = ncc_unrotate_match(src_down_sampling_array[i],
temp_downsampling_data[i], match_region=match_region,
threshold=threshold)
else:
_match_points = ncc_rotate_match(src_down_sampling_array[i],
temp_downsampling_data[i], match_region=match_region,
threshold=threshold)
if i == 0:
match_points = _match_points
if len(_match_points) != 0:
###利用上一层的最佳匹配值来作为下一层匹配的种子点###
downsample_match_point = sorted(_match_points, key=lambda _point: _point['match_score'], reverse=True)[0][
'point']
else:
break
return match_points
def draw_result(src, temp, match_point):
src = cv2.cvtColor(src, cv2.COLOR_GRAY2RGB)
cv2.rectangle(src, match_point,
(match_point[0] + temp.shape[1], match_point[1] + temp.shape[0]),
(0, 255, 0), 1)
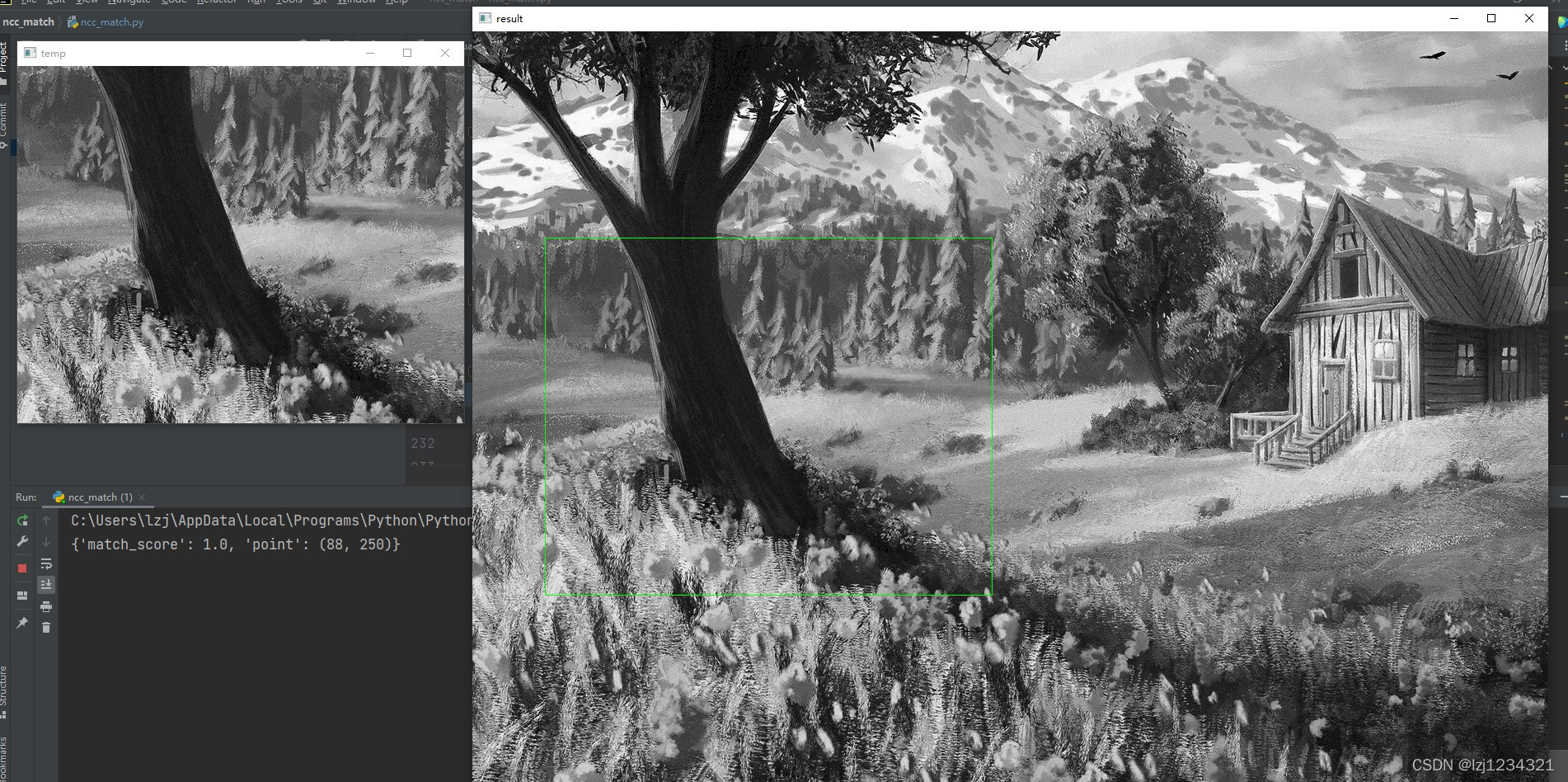
cv2.imshow('temp', temp)
cv2.imshow('result', src)
cv2.waitKey()
if __name__ == '__main__':
src = cv2.imread('img/1.jpg', cv2.IMREAD_GRAYSCALE)
temp = cv2.imread('img/temp.png', cv2.IMREAD_GRAYSCALE)
downsamplingtime = 4
threshold = 0.7
is_rotate = True
match_points = ncc_match(src, temp, is_rotate=is_rotate, threshold=threshold, downsamplingtime=downsamplingtime)
if len(match_points) != 0:
best_match_point = sorted(match_points, key=lambda _point: _point['match_score'], reverse=True)[0]
print(best_match_point)
draw_result(src, temp, best_match_point['point'])
else:
print("no match point")
gitee代码链接地址http://gitee.com/ncc_match.git
本文转载自: https://blog.csdn.net/m0_53362727/article/details/122984058
版权归原作者 lzj1234321 所有, 如有侵权,请联系我们删除。
版权归原作者 lzj1234321 所有, 如有侵权,请联系我们删除。