
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
文章目录
一、ROS下USB相机驱动
在VMware虚拟机中安装USB相机的驱动并读取USB相机的图像数据,第一步先设置虚拟机能够正常的调用本机电脑的USB设备的接口,具体的设置操作可以参考下面这篇博客:
VMware虚拟机中ubuntu使用记录(4)—— 如何在VMware虚拟机中调用本机电脑的摄像头
1.准备工作
(1) 下载驱动
ROS版本USB摄像头驱动(建议从ROS官网给出的USB驱动源码包进行编译安装)
官网的下载地址:https://github.com/ros-drivers/usb_cam
(2) 创建ROS工作空间
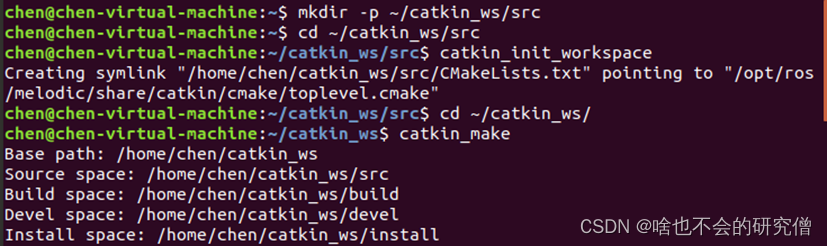
1)创建工作空间,终端输入:
roscore
mkdir-p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
2)编译工作空间
cd ~/catkin_ws/
catkin_make
3)使得工作空间的环境变量生效
source devel/setup.bash
4)使得环境变量在所有的终端中都有效(将路径添加进.bashrc文件中):
按个人的喜好,此步骤不是必选项,执行这段代码之后,意味着电脑开机就自动生效该工作空间的ROS环境
echo"source ~/catkin_ws/devel/setup.bash">> ~/.bashrc
5)保存.bashrc文件,查看添加的环境变量是否生效:
source ~/.bashrc
6)查看添加的环境变量是否生效,创建一个新终端,输入:
echo$ROS_PACKAGE_PATH
回车之后会显示如下语句,如果打印的路径中包含当前工作空间的路径,则环境变量设置成功,整个操作页面如下图所示:

2. 安装usb_cam驱动
(1) 安装usb_cam驱动包
在catkin_ws/src目录下,下载驱动包:
https://github.com/ros-drivers/usb_cam
(2) 编译代码
切换至catkin_ws的目录下:
cd..
编译工作空间:
catkin_make
等待编译完成即可,一般不会出现什么报错。
3. 修改usb_cam驱动的配置文件
(1) 查看USB摄像头设备号
把usb相机拔插前后哪个设备号发生变化,打开终端:
ls /dev/video*
注意:如果查看设备号出现报错:ls:无法访问‘/dev/video*‘: 没有那个文件或目录,具体的原因分析和解决可以参考我下面这篇博客:
拔插usb设备,重复输入查看设备号的指令,页面如下:

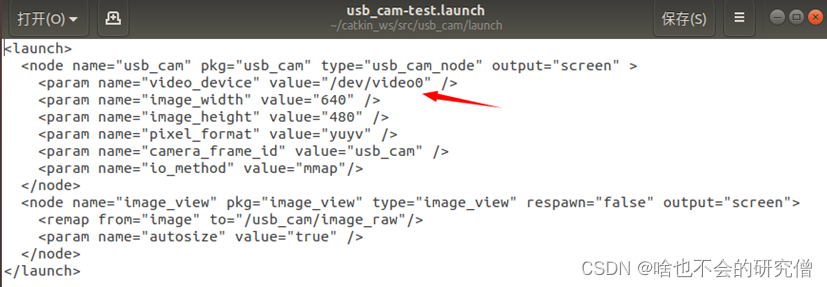
(2) 修改launch文件
查看usb_cam内部结构,在src/usb_cam目录下打开并编辑launch文件“
(3) 编译usb_cam相机驱动
1)切换至/catkin_ws目录工作空间,
终端输入: catkin_make
编译成功如下:(建立相机节点:usb_cam_node)
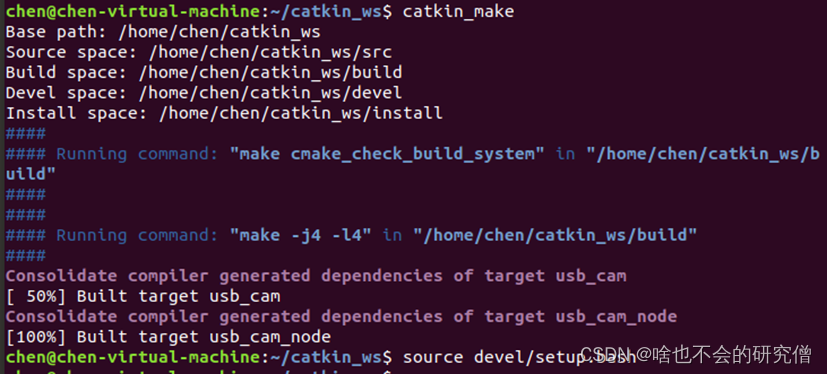
2) 使得工作空间的环境变量生效:
source devel/setup.bash
echo"source ~/catkin_ws/devel/setup.sh">> ~/.bashrc //永久生效环境
4. 启动相机节点
(1) 启动ROS master
CTRL+ALT+T打开终端1:roscore
(2) 启动相机节点
在/catkin_ws目录下打开终端2:
source devel/setup.bash //生效环境过环境后,可跳过此步
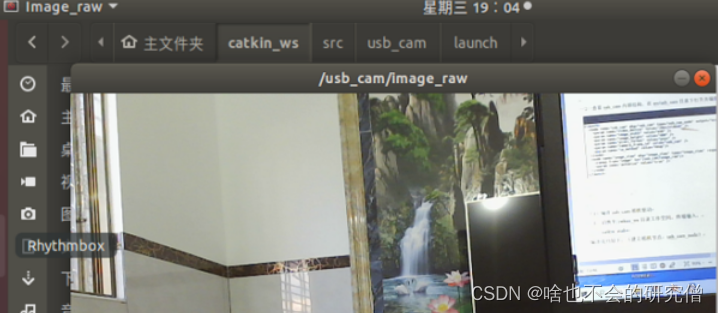
roslaunch usb_cam usb_cam-test.launch //启动相机
启动节点后,弹出一小窗,效果如下:
如果相机启动时出现如下警告:
原因:
由于相机没有进行标定,所以出现警告
解决:
使用张正友相机标定法进行标定,
具体的标定流程可以参考我这篇博客的记录:VMware虚拟机中ubuntu使用记录(6)—— 如何标定单目相机的内参(张正友标定法)
版权归原作者 啥也不会的研究僧 所有, 如有侵权,请联系我们删除。