
文章目录

Hi, 你好。我是茶桁。
我们上一节课,用了一个示例来展示了一下我们为什么要用RNN神经网络,它和全连接的神经网络具体有什么区别。
这节课,我们就着上一节课的内容继续往后讲,没看过上节课的,建议回头去好好看看,特别是对代码的进程顺序好好的弄清楚。
全连接的模型得很仔细的去改变它的结构,然后再给它加很多东西,效果才能变好:
self.linear_with_tanh = nn.Sequential(
nn.Linear(10, self.hidden_size),
nn.Tanh(),
nn.Linear(self.hidden_size, self.hidden_size),
nn.Tanh(),
nn.Linear(self.hidden_size, output_size))
但是对于RNN模型来说,我们只用了两个函数:
self.rnn = nn.RNN(x_size, hidden_size, n_layers, batch_first=True)
self.out = nn.Linear(hidden_size, output_size)
这是一个很本质的问题, 也比较重要。为什么RNN的模型这么简单,它的效果比更复杂的全连接要好呢?
这个和我们平时生活中做各种事情其实都很类似,他背后的原因是他的信息保留的更多。RNN模型厉害的本质是在运行的过程中把更多的信息记录下来,而全连接没有记录。
对于RNN模型,还有两个点大家需要注意。
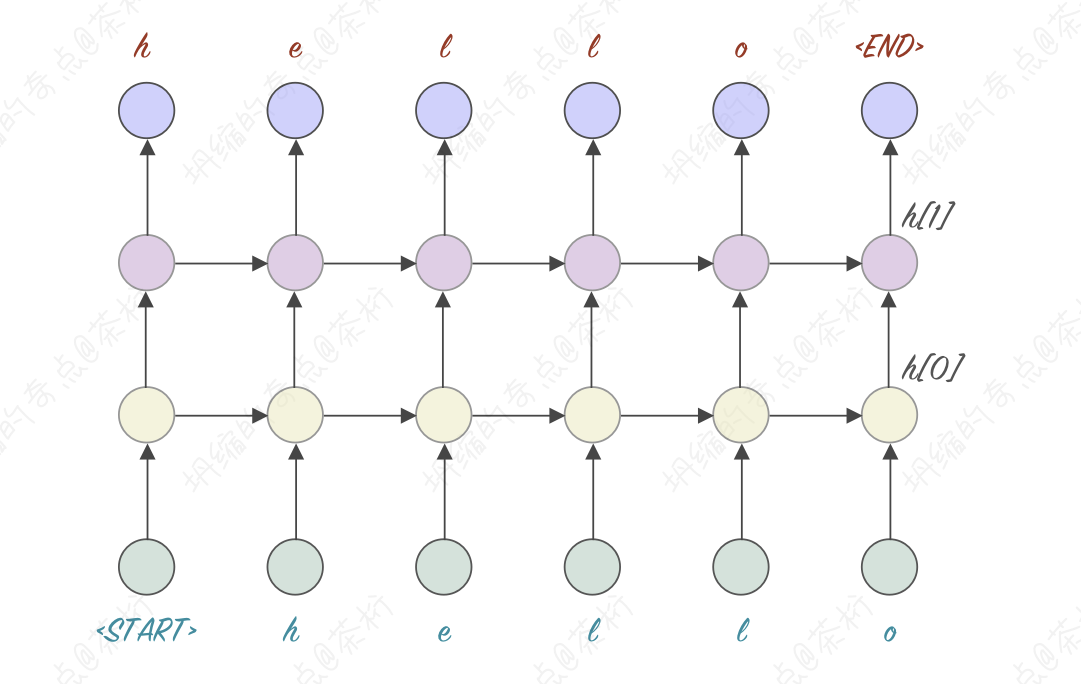
第一个,有一种叫做stacked的RNN的模型。我们RNN模型每一次输出都有一个output和hidden,把outputs和hidden作为它的输入再传给另外一个RNN模型,模型就变得更复杂,理论上可以解决些更复杂的场景。我们把这种就叫做stacked RNN。
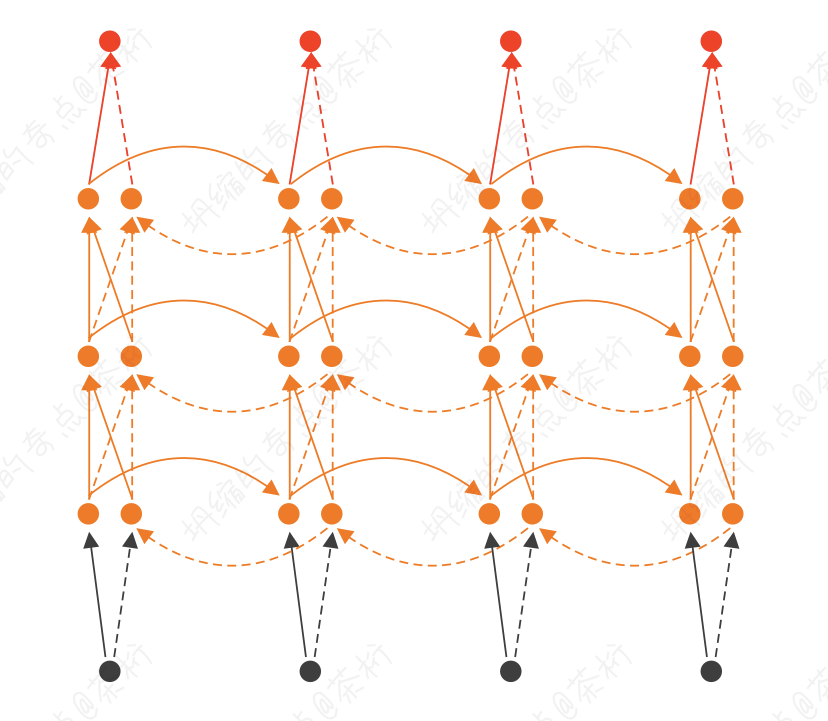
还有一种形式,Bidirectional RNN,双向RNN。有一个很著名的文本模型Bert, 那个B就是双向的意思。
我们回过头来看上节课我们讲过的两种网络:
h
t
=
σ
h
(
W
h
x
t
+
U
h
h
t
−
1
+
b
h
)
y
t
=
σ
y
(
W
y
h
t
+
b
y
)
\begin{align*} h_t & = \sigma_h(W_hx_t + U_hh_{t-1} + b_h) \\ y_t & = \sigma_y(W_yh_t + b_y) \end{align*}
htyt=σh(Whxt+Uhht−1+bh)=σy(Wyht+by)
在这个里面,每一时刻的y_t只和y_{t-1} 有关系,如果把所有的x一次性给到模型的时候,其实我们在这里可以给它加一个东西:
h
t
=
σ
h
(
W
h
x
t
+
U
h
h
t
−
1
+
V
h
∗
h
t
+
1
+
b
h
)
\begin{align*} h_t & = \sigma_h(W_hx_t + U_hh_{t-1} + V_h * h_{t+1} + b_h) \end{align*}
ht=σh(Whxt+Uhht−1+Vh∗ht+1+bh)
还可以写成这样,那这样的话它实现的就是每一时刻的t既和前一次有关系
和后一刻有关系。这样我们每一次的值不仅和前面有关,还和后面有关。就叫做双向RNN。
对于RNN来说,它有一个很严重的问题,就是之前说过的,它的vanishing和exploding的问题会很明显, 也就是梯度消失和爆炸问题。
想一下,现在如果有一个loss,那它最终的loss是不是对于{x1, x2, …, xn}都有关系,比方说现在要求
∂
l
o
s
s
∂
w
1
\frac{\partial loss}{\partial w_1}
∂w1∂loss, 假如说现在h是100, 那这种调用关系就是
∂
l
o
s
s
∂
w
1
=
∂
h
100
∂
h
99
⋅
∂
h
99
∂
h
98
⋅
.
.
.
⋅
∂
h
0
∂
w
1
\begin{align*} \frac{\partial loss}{\partial w_1} = \frac{\partial h_{100}}{\partial h_{99}} \cdot \frac{\partial h_{99}}{\partial h_{98}} \cdot ... \cdot \frac{\partial h_{0}}{\partial w_{1}} \end{align*}
∂w1∂loss=∂h99∂h100⋅∂h98∂h99⋅...⋅∂w1∂h0
loss对于w1求偏导的时候,其实loss最先接受的是离他最近的, 假如说是h100。h100调用了h99,h99调用h98,就这个调用过程,这一串东西会变得很长。
我们之前课程说过一些情况,怎么去解决这个问题呢?对于RNN模型来说梯度爆炸很好解决,就直接设定一个阈值就可以了,起码也是能学习的。
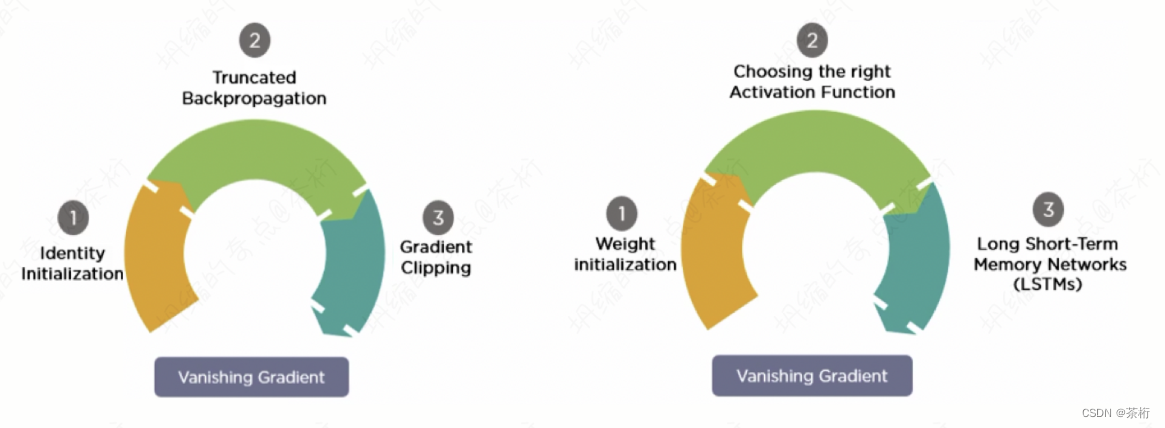
要讲的是想一种方法怎么样来解决梯度消失的问题。这个梯度消失的解决方法,就叫LSTM。要解决梯度消失,就是要用LSTM: Long Short-Term Memory,长短记忆模型,既能保持长信息,又能保持短信息。
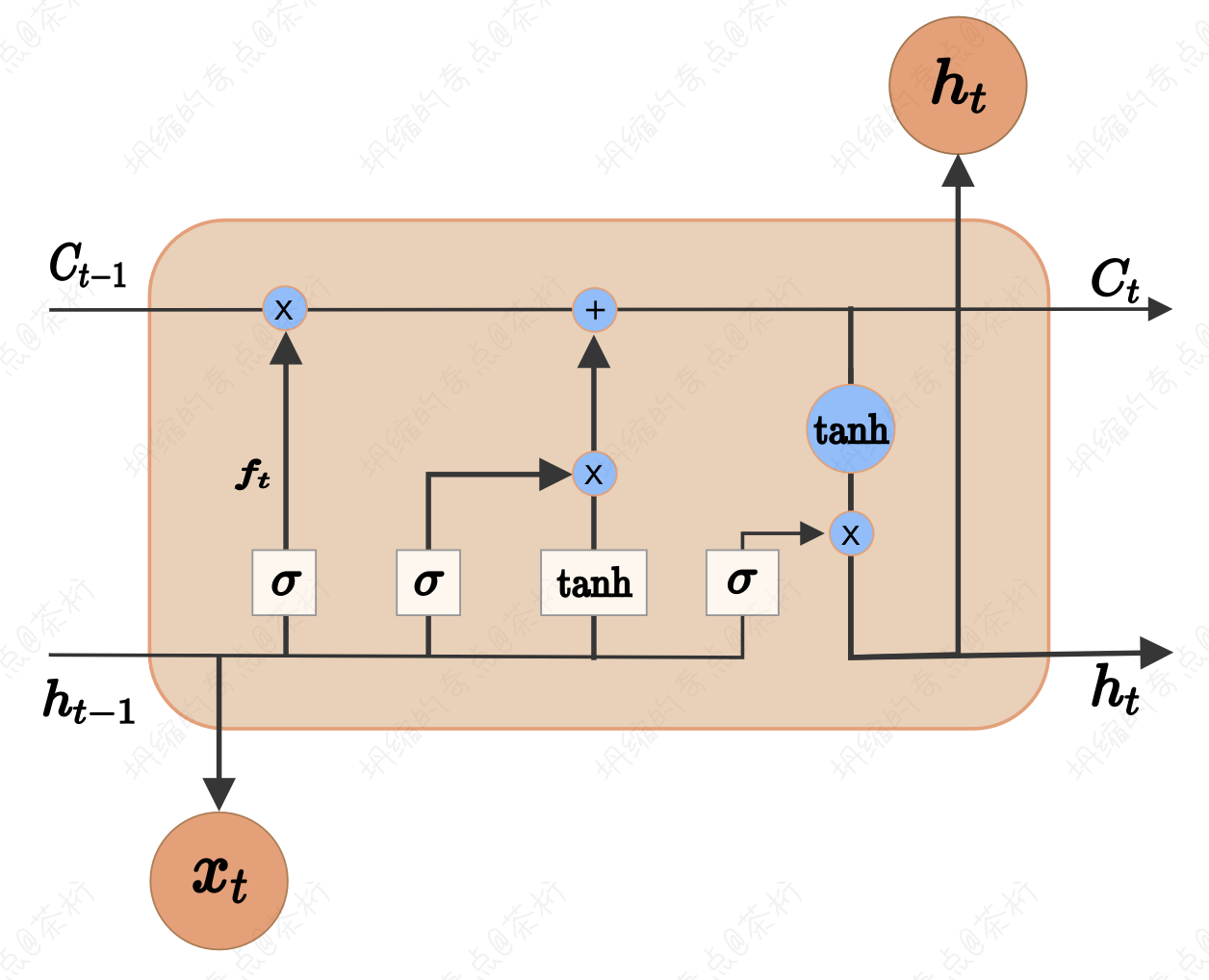
在之前那个很长的过程中,怎么样能够让它不消散呢?LSTM的核心思想是通过门控机制来控制信息的流动和及已的更新,包含了Input Gate, Forget Gate,Cell State以及Output Gate。这些会一起协作来处理序列数据。
其中Input Gate控制着新信息的输入,以及信息对细胞状态的影响。 Forget Gate控制着细胞状态中哪些信息应该被易王,Cell State用于传递信息,是LSTM的核心,Output Gate控制着细胞状态如何影响输出。
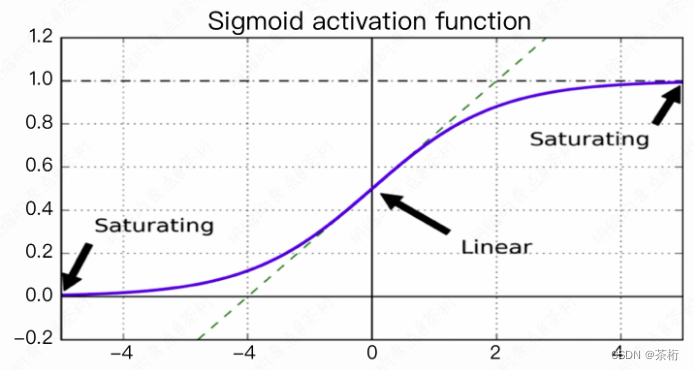
这里每一个门控单元都由一个Sigmoid激活函数来控制信息的流动,以及一个Tanh激活函数来确定信息的值。
I
n
p
u
t
G
a
t
e
i
t
=
σ
(
W
i
⋅
[
h
t
−
1
,
x
t
]
+
b
i
)
C
′
t
=
tanh
(
W
c
⋅
[
h
t
−
1
,
x
t
]
+
b
c
)
C
t
=
f
t
⋅
C
t
−
1
+
i
t
⋅
C
t
′
F
o
r
g
e
t
G
a
t
e
f
t
=
σ
(
W
f
⋅
[
h
t
−
1
,
x
t
]
+
b
f
)
C
t
=
f
t
⋅
C
t
−
1
+
i
t
⋅
C
t
′
O
u
t
p
u
t
G
a
t
e
o
t
=
σ
(
W
o
⋅
[
h
t
−
1
,
x
t
]
+
b
o
)
h
t
=
o
t
⋅
tanh
(
C
t
)
\begin{align*} Input Gate \\ i_t & = \sigma(W_i \cdot [h_{t-1}, x_t] + b_i) \\ C't & = \tanh(W_c \cdot [h{t-1}, x_t] + b_c) \\ C_t & = f_t \cdot C_{t-1} + i_t \cdot C'_t \\ Forget Gate \\ f_t & = \sigma(W_f \cdot [h_{t-1}, x_t] + b_f) \\ C_t & = f_t \cdot C_{t-1} + i_t \cdot C'_t \\ Output Gate \\ o_t & = \sigma(W_o \cdot [h_{t-1}, x_t] + b_o) \\ h_t & = o_t \cdot \tanh(C_t) \end{align*}
InputGateitC′tCtForgetGateftCtOutputGateotht=σ(Wi⋅[ht−1,xt]+bi)=tanh(Wc⋅[ht−1,xt]+bc)=ft⋅Ct−1+it⋅Ct′=σ(Wf⋅[ht−1,xt]+bf)=ft⋅Ct−1+it⋅Ct′=σ(Wo⋅[ht−1,xt]+bo)=ot⋅tanh(Ct)
其中,
h
t
−
1
h_{t-1}
ht−1 是前一个时间步的隐藏状态,
x
t
x_t
xt 是当前时间步的输入,
W
i
,
W
f
,
W
o
,
W
c
W_i, W_f, W_o, W_c
Wi,Wf,Wo,Wc 是权重矩阵,
b
i
,
b
f
,
b
o
,
b
c
b_i, b_f, b_o, b_c
bi,bf,bo,bc 是偏置。
LSTM输入的是一个序列数据,可以是文本、时间序列,音频信号等等。那每个时间步的输入是序列中的饿一个元素,比如一个单词、一个时间点的观测值等等。
假设我们有一个序列 x = [x1, x2, …, xt], 其中t就代表的是时间步。
xt进来的时候, 之前我们是只接收一个hidden state, 现在我们多接收了一个
C
t
−
1
C_{t-1}
Ct−1,这个就是我们的Cell,这一步的
C
t
−
1
C_{t-1}
Ct−1其实就是上一步的
C
t
C_t
Ct。
在训练开始时,需要初始化LSTM单元的隐藏状态h0和细胞状态c0。通常我们初始化它们为全零向量。
最开始的时候,我们要进入Input Gate, 对于每个时间步t, 计算输入门的激活值
i
t
i_t
it,控制新信息的输入。使用Sigmoid函数来计算输入门的值:
i
t
=
σ
(
W
i
⋅
[
h
t
−
1
,
x
t
]
+
b
i
)
i_t = \sigma (W_i \cdot [h_{t-1}, x_t] + b_i)
it=σ(Wi⋅[ht−1,xt]+bi)
然后,计算新的侯选值
C
t
′
C'_t
Ct′, 这是在当前时间步考虑的新信息。使用tanh激活函数来计算侯选值:
C
t
′
=
t
a
n
h
(
W
c
⋅
[
h
t
−
1
,
x
t
]
+
b
c
)
C'_t = tanh(W_c \cdot [h_{t-1}, x_t] + b_c)
Ct′=tanh(Wc⋅[ht−1,xt]+bc)
接下来我们就要更新细胞状态了,细胞状态
C
t
C_t
Ct更新是通过遗忘门
f
t
f_t
ft和输入门
i
t
i_t
it控制的。遗忘门控制着哪些信息应该被遗忘,输入门控制新信息对细胞状态的影响:
C
t
=
f
t
⋅
C
t
−
1
+
i
t
⋅
C
t
′
C_t = f_t \cdot C_{t-1} + i_t \cdot C'_t
Ct=ft⋅Ct−1+it⋅Ct′
那遗忘门决定哪些信息应该被遗忘,使用的就是Sigmoid函数计算遗忘门的激活值。
f
t
=
σ
(
W
f
⋅
[
h
t
−
1
,
x
t
]
+
b
f
)
f_t = \sigma(W_f \cdot [h_{t-1}, x_t] + b_f)
ft=σ(Wf⋅[ht−1,xt]+bf)
接着,计算输出门
O
t
O_t
Ot, 控制着细胞状态如何影响输出和隐藏状态。一样,我们还是使用Sigmoid函数计算。
o
t
=
σ
(
W
o
⋅
[
h
t
−
1
,
x
t
]
+
b
o
)
o_t = \sigma(W_o \cdot [h_{t-1}, x_t] + b_o)
ot=σ(Wo⋅[ht−1,xt]+bo)
使用输出门的值
o
t
o_t
ot来计算最终的隐藏状态
h
t
h_t
ht和输出。 隐藏状态和输出都是根据细胞状态和输出门的值来计算的:
h
t
=
o
t
⋅
t
a
n
h
(
C
t
)
h_t = o_t \cdot tanh(C_t)
ht=ot⋅tanh(Ct)
接下来就容易了,我们迭代重复上述过程,处理序列中的每一个时间步,直到处理完整个序列。
LSTM的输出可以是隐藏状态
h
t
h_t
ht, 也可以是细胞状态
C
t
C_t
Ct, 具体是取决于应用的需求。
后来大家就发现了一种改进的LSTM,其中门控机制允许细胞状态窥视现前的细胞状态的信息,而不仅仅是根据当前时间步的输入和隐藏状态来决定。 这个机制在LSTM单源种引入了额外的权重和连接,以允许细胞状态在门控过程中访问现前的细胞状态,我们称之为窥视孔连接: Peephole connections。
f
t
=
σ
(
W
f
⋅
[
C
t
−
1
,
h
t
−
1
,
x
t
]
+
b
f
)
i
t
=
σ
(
W
i
⋅
[
C
t
−
1
,
h
t
−
1
,
x
t
]
+
b
i
)
o
t
=
σ
(
W
o
⋅
[
C
t
−
1
,
h
t
−
1
,
x
t
]
+
b
o
)
\begin{align*} f_t = \sigma(W_f \cdot [C_{t-1}, h_{t-1}, x_t] + b_f) \\ i_t = \sigma(W_i \cdot [C_{t-1}, h_{t-1}, x_t] + b_i) \\ o_t = \sigma(W_o \cdot [C_{t-1}, h_{t-1}, x_t] + b_o) \\ \end{align*}
ft=σ(Wf⋅[Ct−1,ht−1,xt]+bf)it=σ(Wi⋅[Ct−1,ht−1,xt]+bi)ot=σ(Wo⋅[Ct−1,ht−1,xt]+bo)
之前,我们是xt和x_{t-1}决定的f,那现在又把c_{t-1}加上了。就是多加了一些信息。
除此之外它有一个方法GRU,这个是2014年提出来的,Geted Recurrent Unit,它是LSTM的一个简化版本。
它最核心的内容:
h
t
=
(
1
−
z
t
)
⋅
h
t
−
1
+
z
t
⋅
h
t
′
\begin{align*} h_t = (1-z_t) \cdot h_{t-1} + z_t \cdot h'_t \end{align*}
ht=(1−zt)⋅ht−1+zt⋅ht′
咱们刚刚是
C
t
=
f
t
⋅
C
t
−
1
+
i
t
⋅
C
t
′
C_t = f_t \cdot C_{t-1} + i_t \cdot C'_t
Ct=ft⋅Ct−1+it⋅Ct′,也就是遗忘加上输入,那我们对过去保留越多的时候,
输入就会越小,那对过去保留越小的时候,输入就会越大。
所以既然f也是1-0,i也是0-1,f大的时候i就小,f小的时候i就大,那么能不能写成f=(1-i)?
于是,GRU就这样实现了, 它其实最核心的就做了这样一件事, f=(1-i)。
z
t
=
σ
(
W
z
⋅
[
h
t
−
1
,
x
t
]
)
r
t
=
σ
(
W
r
⋅
[
h
t
−
1
,
x
t
]
)
h
t
′
=
tanh
(
W
⋅
[
r
t
⋅
h
t
−
1
,
x
t
]
)
h
t
=
(
1
−
z
t
)
⋅
h
t
−
1
+
z
t
⋅
h
t
′
\begin{align*} z_t & = \sigma(W_z \cdot [h_{t-1}, x_t]) \\ r_t & = \sigma(W_r \cdot [h_{t-1}, x_t]) \\ h'_t & = \tanh(W \cdot [r_t \cdot h_{t-1}, x_t]) \\ h_t & = (1-z_t) \cdot h_{t-1} + z_t \cdot h'_t \end{align*}
ztrtht′ht=σ(Wz⋅[ht−1,xt])=σ(Wr⋅[ht−1,xt])=tanh(W⋅[rt⋅ht−1,xt])=(1−zt)⋅ht−1+zt⋅ht′
这个z其实和i是一样的东西,只是原作者为了发表论文方便而改了个名称。
https://arxiv.org/pdf/1406.1078v3.pdf
r
t
r_t
rt是来控制上一时刻的
h
t
h_t
ht在我们此时此刻的重要性、影响程度。那我们可以将
r
t
⋅
h
t
−
1
r_t \cdot h_{t-1}
rt⋅ht−1看成是关于及已的,
1
−
z
t
1-z_t
1−zt也是关于记忆的。
GRU这样做之后有什么好处呢?
原来我们有三个门: f, i, o, 那现在变成了两个,z和r。为什么就更好了呢?我们在PyTorch里面往往用的是GRU。
大家想一下,是不是少了一个门其实就少了一个矩阵?我们看公式的时候,
W
f
W_f
Wf是一个数学符号,但是在背后其实是一个矩阵,是一个矩阵的话少了一个矩阵意味着参数就少多了,运算就更快了等等。
但其实这些都不是最关键的,最关键的是减少过拟合了。我们之前的课程中一再强调,过拟合之所以产生,最主要的原因是数据不够或者说是模型太复杂。
但是在现有的数据情况下,为了让数据发挥出最大效力,你把需要训练的模型变简单,参数变少,就没有那么复杂了。
关于RNN模型,我们后面还会介绍一些具体的示例。
版权归原作者 茶桁 所有, 如有侵权,请联系我们删除。