
在线或离线学习
上一节我们了解了什么是策略梯度,本节开始讲PPO理论之前,我们先提出一个概念,什么在线学习,什么离线学习。
On-policy: Then agent learned and the agent interacting with Environment is the same
Off-policy: Then agent learned and the agent interacting with Environment is not the same
英语确实不好理解,用中文讲就是说,你训练agent需要数据,这些数据可能是你训练的agent和环境交互产生的,那么这就是在线,也可能不是训练的agent产生的,而是另外的agent产生的,这就是离线。
对于一个策略梯度来说在线,离线有什么区别呢?
策略梯度根据上一节的结论,理论上的公式如下,这是一个在线学习的梯度:
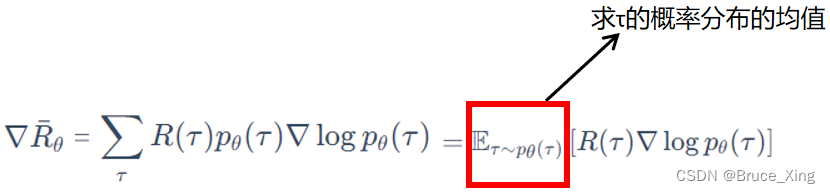
(这里多了一个上一节没有的公式,就是用了一个均值符号)
- 现在我们用一个
去收集数据,但是更新了一次
之后,就要重新去收集数据,因为之前用的是
,这就是驴唇不对马嘴🙄🙄。而且这样效率也低,为什么,因为强化学习大部分的时间都不是消耗在GPU上,而是和环境的互动上,好不容易互动出来点数据,更新一下又得扔了,能不低效吗。
- 那么转成离线off policy好像就可以解决这个问题,也就是说我们可以从
收集数据取更新
是固定的,就可以重复利用,大大提升效率。
( 这里插一嘴,李宏毅老师在这里称作是从on-policy 到 off-policy。PPO给我的感觉也是一个离线的算法,但是easy-rl和很多其他博主都说PPO是一个在线,包括PPO2的论文原文也说PPO比其他的on-policy策略要叼。这里也欢迎讨论)
重要性采样Important Sampling
我们找到了一个提升训练效率的方法, 可以从收集数据取更新
,因为
是固定的,就可以重复利用,大大提升效率。但是凭什么
可以训练
啊,你的上一章梯度公式里明明只有一个
,你这公式保熟吗?🍉🍉
这里就不得不提到重要性样Important Sampling
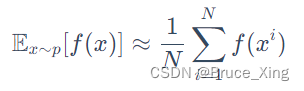
先看这个公式,假设我们有一个函数f(x),我们从一个分部p中采样,把采样到的的x在带入f(x)。这样即使我们不能对f(x)积分,只要采样够多,我们就可以f(x)在p分布中的均值得到一个均值。
现在我们在假设一种情况,如果我们不能从p中去采样,我们只能从另外一个分部q(x)去采样,可以得到f(x)在p分布中的均值吗? 答案是肯定的,具体的推导如下:

最后结论是这样:
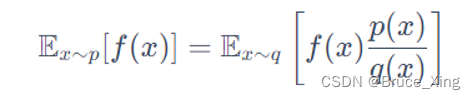
这里看不懂的可以复习下概率论,如果你比较懒也不影响你理解,这里要记住的是,我们已经成功的把从p的采样,改为了从q中的采样。
我们把这个称为重要性权值。如果我们 sample非常多,那么这个重要性权不会有什么影响。但是,but,这是很理想的情况,真是情况不太可能sample的非常均匀且足够,如果这两个分布的方差非常大的话,sample的次数一旦不足,最后结果误差就会非常大!
所以现在提问Q:从p中采样和从q中采样方差Variance一样吗?
根据公式(还是概率论中的公式)来计算一下。

其实p采样和q采样的方差就差了一项重要性权值,,也就是说只要我们保证这两个差别不要太大,结果就还是理想的。举个经典例子,上图

简单来说就是,q分布再右侧概率较大,sample时候容易偏向右,sample出来的正值的点多可能会计算错误,把f(x)均值计算成正的,但实际上它是负值。如果能采样到左边,是一个绝对值很大的负值,就可以很好的纠正最后的计算结果。
on-policy在线 → off policy 离线
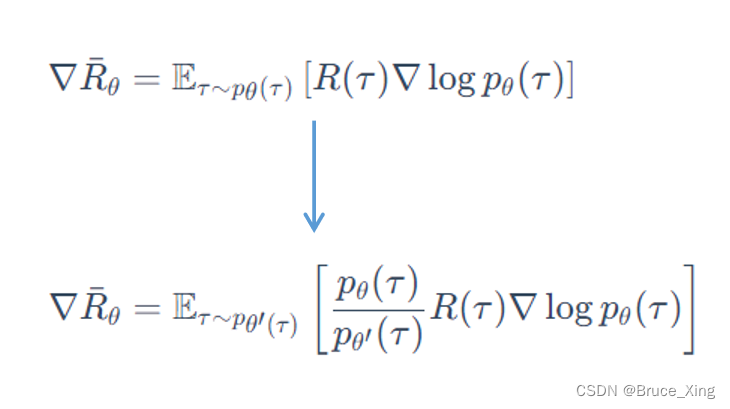
经过了这么多的验证,那么我们怎么把PPO从在线推到离线呢,就像这样。其实跟上面说的一样
这样整个策略梯度中,我们就可以用来更新
。这样就可以让
采样大量数据,然后更新多次
,大大提升了效率。实际上做策略梯度时,我们并不是用整条轨迹
来做更新,而是根据每一个状态-动作(
) 对来分别计算。实际更新梯度的过程用的其实就是下式:

然后在从在线推到离线:

上的
,代表是策略参数为
与环境交互,但实际上现在我们用的是
来采样,现在这个优势就是用
来估算的,这里先不管那么多,假设
。
然后我们在拆分这两项和
**Q:这里恰一个问题:为什么要拆分呢?**如果不拆分,或者
,是什么,是我们输入一个动作-状态对,然后输出一个概率,但实际上我们的策略网络并不是这个结构,想一想策略网略是输入一个状态然后输出一个动作的概率分布啊。如果不懂可以接着往后看,看完代码在会后看看以这个问题。
现在梯度下降就可以看做是:

蓝框中的这一项可以消掉,原因可以说是不管是用,还是
看到同一状态的概率是一样的,又或者是这两项不好计算,想一想玩游戏时候,游戏画面复杂众多,好像计算某一个画面的出现概率很难计算,这里就直接消掉了,反正最后效果很好,神奇而玄学吧😂😂。
我们把要优化的目标的函数成为,
是其中要优化的参数

再根据链式法带入,则得到最后的目标函数。(终于得到可以用的目标的函数了🤪🤪,是不是很easy)

- θ 代表我们要去优化的参数
- θ′ 是指我们用θ′ 做示范,就是现在真正在与环境交互的是θ′
近端策略优化
还记得开始的时候我们写的重要性采样原理吗?里面有很重要的一条的就是θ,θ′ 两个采样样本差异要小,这里就用KL散度(KL divergence)来衡量这个差异,如果你不知道KL散度是什么,可以看这篇。但是,这里我们只要记得KL散度就是用来衡量θ,θ′的差异大小。
初学机器学习:直观解读KL散度的数学概念 - 知乎选自 http://thushv.com,作者:Thushan Ganegedara,机器之心编译。机器学习是当前最重要的技术发展方向之一。近日,悉尼大学博士生 Thushan Ganegedara 开始撰写一个系列博客文章,旨在为机器学习初学者介绍一些…https://zhuanlan.zhihu.com/p/37452654
PPO的公式就是在上面策略梯度的基础上加上一个KL散度的限制
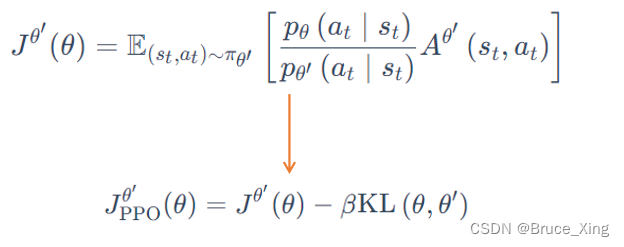
这里KL可以当做一个函数,注意这里θ 与 θ′ 的距离并不是参数上的距离,而是输出动作上的差异。
PPO 有一个前身:信任区域策略优化(trust region policy optimization,TRPO)。TRPO 可表示为如下:

RPO 是很难处理的,因为它把 KL 散度约束当作一个额外的约束,没有放在目标(objective)里面,所以它很难计算。因此我们一般就使用 PPO,而不使用 TRPO 。PPO 与 TRPO 的性能差不多,但 PPO 在实现上比 TRPO 容易得多。
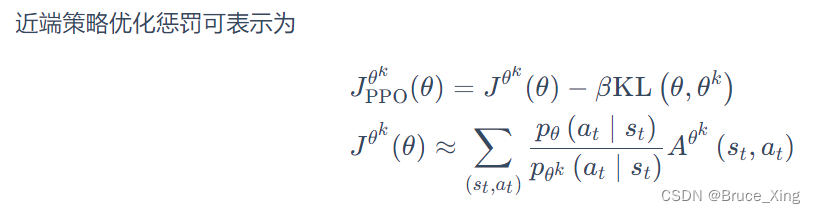
PPO1(近端策略优化惩罚)
PPO 算法有两个主要的变种:近端策略优化惩罚(PPO-penalty)和近端策略优化裁剪(PPO-clip)。
PPO1 是近端策略优化惩罚(PPO-penalty),在 PPO 的论文里面还有一个自适应KL散度(adaptive KL divergence)。这里会遇到一个问题就,即β 要设置为多少?这里easy-rl解释的非常清楚了,我就直接引用了
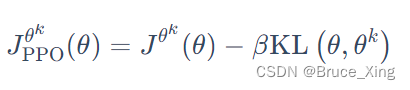
KL 散度的值太大,这就代表后面惩罚的项βKL(,
) 没有发挥作用,我们就把β 增大。另外,我们设一个 KL 散度的最小值。如果优化上式以后,KL 散度比最小值还要小,就代表后面这一项的效果太强了,我们怕他只优化后一项,使
与
一样,这不是我们想要的,所以我们要减小 β。β 是可以动态调整的,因此我们称之为自适应KL惩罚(adaptive KL penalty)。我们可以总结一下自适应KL惩罚:
具体不再延伸,因为实际问题我们基本都会用PPO2而不是PPO1。本文的代码也是PPO2,所以向更具体了解的童鞋们可以再去看相关的论文。
PPO2(近端策略优化剪裁)
PPO2可以说是简单粗暴,为什么这么说呢,看公式

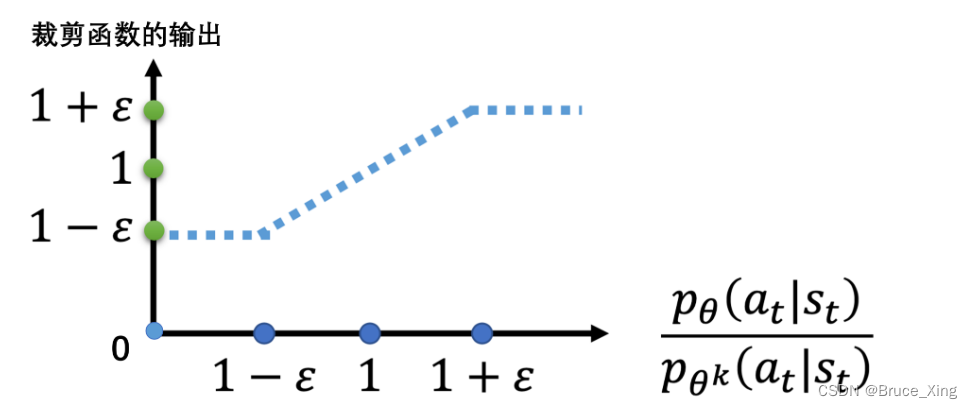
计算KL散度太复杂,我干脆直接限定输出动作概率分布比值的最大最小值,就用min,和clip中的这一串,整个式子中:
- min 是在第一项与第二项里面选择比较小的项
- 有一个裁剪clip函数(代码中非常好实现,比如用numpy就有对应的api),裁剪函数是指,在括号里面有3项,如果第一项小于第二项,那就输出 1−ε;第一项如果大于第三项,那就输出 1+ε
- ε 是一个超参数,是我们要调整的,
就是这么简单粗暴,但是,实际效果却非常好!对于clip函数,再放一张图让大家便于理解:
那么A是如何影响结果的呢,直接放图:
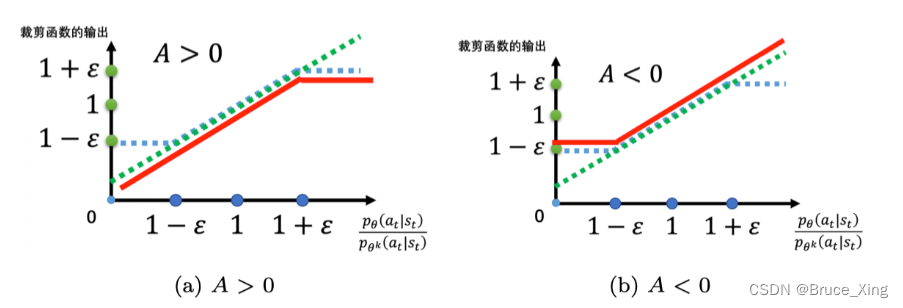
PPO2用了min,用了clip其实还是不想让 和
,差距过大,那么PPO2是怎么做到的?
- 如果 A > 0,也就是某一个状态-动作对是好的,我们希望增大这个状态-动作对的概率。也就是,我们想让
越大越好,但它与
的比值不可以超过1+ε。根据重要性采样,如果比值过大很可能会导致结果不准确。
- 如果 A < 0,也就是某一个状态-动作对是不好的,那么我们希望把
这样和
差距就不会太大。
这一章节我们分析了PPO1,PPO2,基本上所用到的理论都覆盖到了,下一章我们将一步步的写PPO2的代码。
版权归原作者 Bruce_Xing 所有, 如有侵权,请联系我们删除。