
Decoupled_Detect
一、common.py文件中加入DecoupledHead
class DecoupledHead(nn.Module):
def __init__(self, ch=256, nc=80, anchors=()):
super().__init__()
self.nc = nc # number of classes
self.nl = len(anchors) # number of detection layers
self.na = len(anchors[0]) // 2 # number of anchors
self.merge = Conv(ch, 256 , 1, 1)
self.cls_convs1 = Conv(256 , 256 , 3, 1, 1)
self.cls_convs2 = Conv(256 , 256 , 3, 1, 1)
self.reg_convs1 = Conv(256 , 256 , 3, 1, 1)
self.reg_convs2 = Conv(256 , 256 , 3, 1, 1)
self.cls_preds = nn.Conv2d(256 , self.nc * self.na, 1)
self.reg_preds = nn.Conv2d(256 , 4 * self.na, 1)
self.obj_preds = nn.Conv2d(256 , 1 * self.na, 1)
def forward(self, x):
x = self.merge(x)
x1 = self.cls_convs1(x)
x1 = self.cls_convs2(x1)
x1 = self.cls_preds(x1)
x2 = self.reg_convs1(x)
x2 = self.reg_convs2(x2)
x21 = self.reg_preds(x2)
x22 = self.obj_preds(x2)
out = torch.cat([x21, x22, x1], 1)
return out
二、yolo.py文件中加入加入Decoupled_Detect
class Decoupled_Detect(nn.Module):
stride = None # strides computed during build
onnx_dynamic = False # ONNX export parameter
export = False # export mode
def __init__(self, nc=80, anchors=(), ch=(), inplace=True): # detection layer
super().__init__()
self.nc = nc # number of classes
self.no = nc + 5 # number of outputs per anchor
self.nl = len(anchors) # number of detection layers
self.na = len(anchors[0]) // 2 # number of anchors
self.grid = [torch.zeros(1)] * self.nl # init grid
self.anchor_grid = [torch.zeros(1)] * self.nl # init anchor grid
self.register_buffer('anchors', torch.tensor(anchors).float().view(self.nl, -1, 2)) # shape(nl,na,2)
self.m = nn.ModuleList(DecoupledHead(x, nc, anchors) for x in ch)
self.inplace = inplace # use in-place ops (e.g. slice assignment)
def forward(self, x):
z = [] # inference output
for i in range(self.nl):
x[i] = self.m[i](x[i]) # conv
bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
if not self.training: # inference
if self.onnx_dynamic or self.grid[i].shape[2:4] != x[i].shape[2:4]:
self.grid[i], self.anchor_grid[i] = self._make_grid(nx, ny, i)
y = x[i].sigmoid()
if self.inplace:
y[..., 0:2] = (y[..., 0:2] * 2 + self.grid[i]) * self.stride[i] # xy
y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
else: # for YOLOv5 on AWS Inferentia https://github.com/ultralytics/yolov5/pull/2953
xy, wh, conf = y.split((2, 2, self.nc + 1), 4) # y.tensor_split((2, 4, 5), 4) # torch 1.8.0
xy = (xy * 2 + self.grid[i]) * self.stride[i] # xy
wh = (wh * 2) ** 2 * self.anchor_grid[i] # wh
y = torch.cat((xy, wh, conf), 4)
z.append(y.view(bs, -1, self.no))
return x if self.training else (torch.cat(z, 1),) if self.export else (torch.cat(z, 1), x)
def _make_grid(self, nx=20, ny=20, i=0, torch_1_10=check_version(torch.__version__, '1.10.0')):
d = self.anchors[i].device
t = self.anchors[i].dtype
shape = 1, self.na, ny, nx, 2 # grid shape
y, x = torch.arange(ny, device=d, dtype=t), torch.arange(nx, device=d, dtype=t)
yv, xv = torch.meshgrid(y, x, indexing='ij') if torch_1_10 else torch.meshgrid(y, x) # torch>=0.7 compatibility
grid = torch.stack((xv, yv), 2).expand(shape) - 0.5 # add grid offset, i.e. y = 2.0 * x - 0.5
anchor_grid = (self.anchors[i] * self.stride[i]).view((1, self.na, 1, 1, 2)).expand(shape)
return grid, anchor_grid
在yolo.py文件Model类中做如下修改
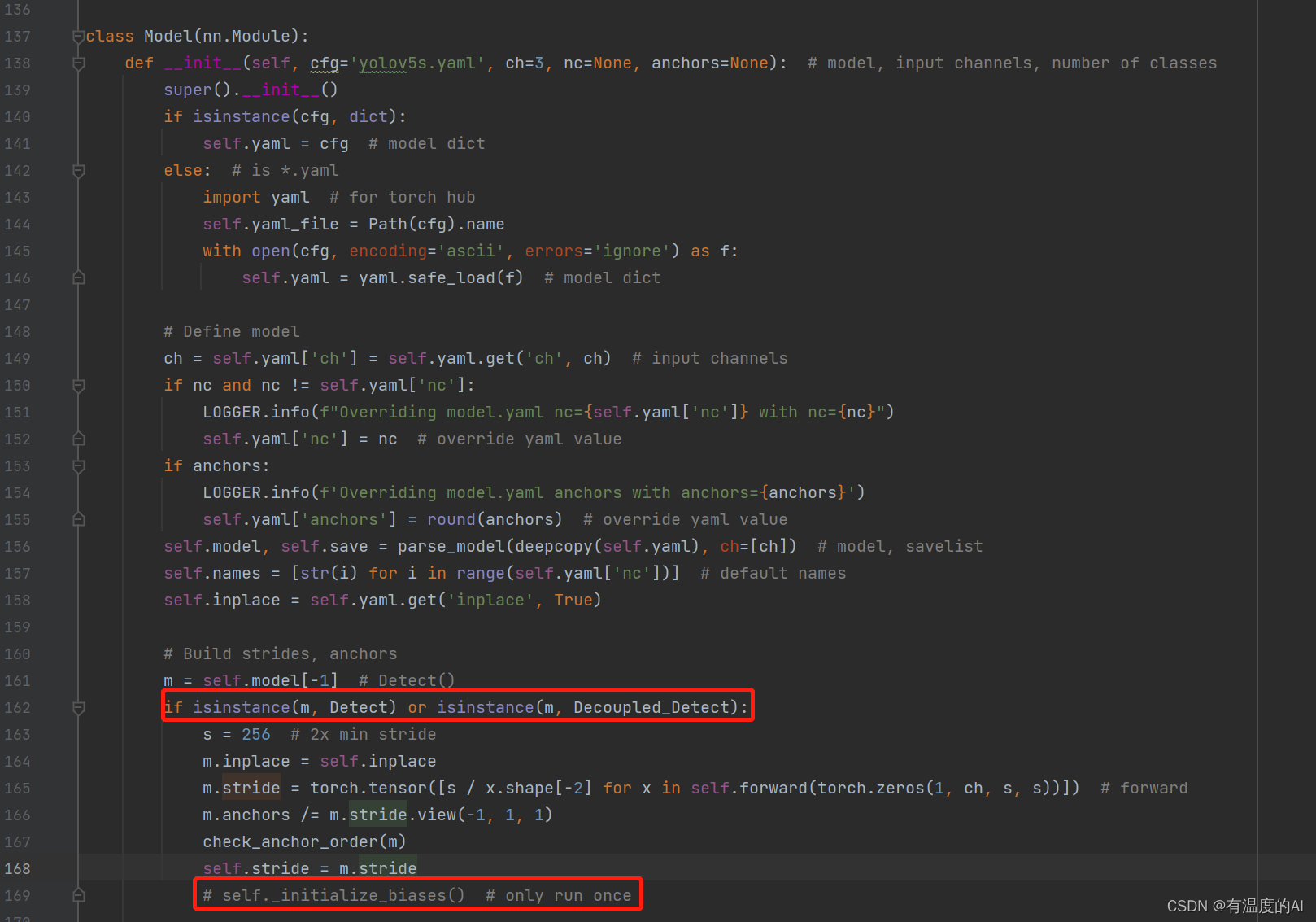

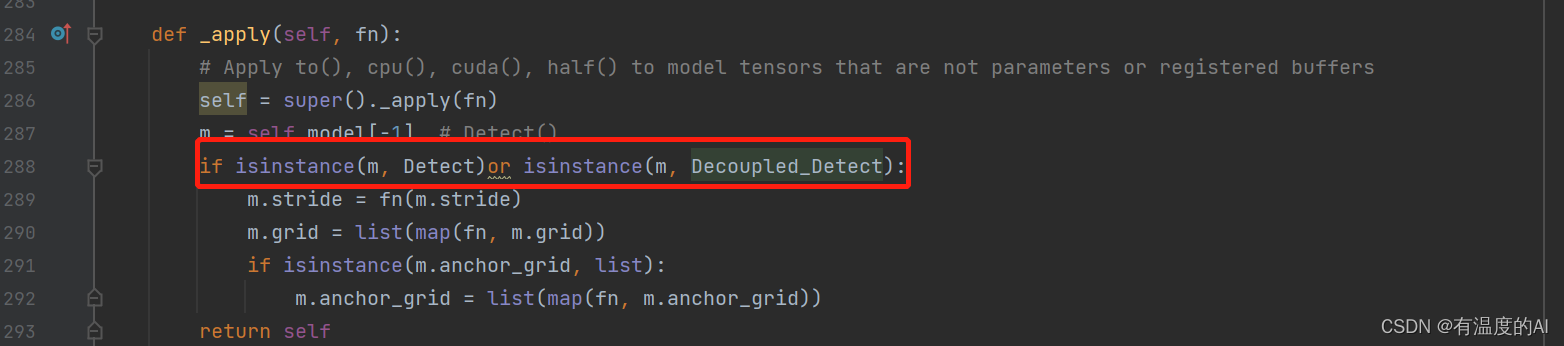
在yolo.py文件parse_model函数下做如下修改

三、yaml文件中的Detect改为Decoupled_Detect

ASFF_Detect
一、common.py文件中加入ASFFV5
class ASFFV5(nn.Module):
def __init__(self, level, multiplier=1, rfb=False, vis=False, act_cfg=True):
"""
ASFF version for YoloV5 .
different than YoloV3
multiplier should be 1, 0.5
which means, the channel of ASFF can be
512, 256, 128 -> multiplier=1
256, 128, 64 -> multiplier=0.5
For even smaller, you need change code manually.
"""
super(ASFFV5, self).__init__()
self.level = level
self.dim = [int(1024 * multiplier), int(512 * multiplier),
int(256 * multiplier)]
# print(self.dim)
self.inter_dim = self.dim[self.level]
if level == 0:
self.stride_level_1 = Conv(int(512 * multiplier), self.inter_dim, 3, 2)
self.stride_level_2 = Conv(int(256 * multiplier), self.inter_dim, 3, 2)
self.expand = Conv(self.inter_dim, int(
1024 * multiplier), 3, 1)
elif level == 1:
self.compress_level_0 = Conv(
int(1024 * multiplier), self.inter_dim, 1, 1)
self.stride_level_2 = Conv(
int(256 * multiplier), self.inter_dim, 3, 2)
self.expand = Conv(self.inter_dim, int(512 * multiplier), 3, 1)
elif level == 2:
self.compress_level_0 = Conv(
int(1024 * multiplier), self.inter_dim, 1, 1)
self.compress_level_1 = Conv(
int(512 * multiplier), self.inter_dim, 1, 1)
self.expand = Conv(self.inter_dim, int(
256 * multiplier), 3, 1)
# when adding rfb, we use half number of channels to save memory
compress_c = 8 if rfb else 16
self.weight_level_0 = Conv(
self.inter_dim, compress_c, 1, 1)
self.weight_level_1 = Conv(
self.inter_dim, compress_c, 1, 1)
self.weight_level_2 = Conv(
self.inter_dim, compress_c, 1, 1)
self.weight_levels = Conv(
compress_c * 3, 3, 1, 1)
self.vis = vis
def forward(self, x): # l,m,s
"""
# 128, 256, 512
512, 256, 128
from small -> large
"""
x_level_0 = x[2] # l
x_level_1 = x[1] # m
x_level_2 = x[0] # s
# print('x_level_0: ', x_level_0.shape)
# print('x_level_1: ', x_level_1.shape)
# print('x_level_2: ', x_level_2.shape)
if self.level == 0:
level_0_resized = x_level_0
level_1_resized = self.stride_level_1(x_level_1)
level_2_downsampled_inter = F.max_pool2d(
x_level_2, 3, stride=2, padding=1)
level_2_resized = self.stride_level_2(level_2_downsampled_inter)
elif self.level == 1:
level_0_compressed = self.compress_level_0(x_level_0)
level_0_resized = F.interpolate(
level_0_compressed, scale_factor=2, mode='nearest')
level_1_resized = x_level_1
level_2_resized = self.stride_level_2(x_level_2)
elif self.level == 2:
level_0_compressed = self.compress_level_0(x_level_0)
level_0_resized = F.interpolate(
level_0_compressed, scale_factor=4, mode='nearest')
x_level_1_compressed = self.compress_level_1(x_level_1)
level_1_resized = F.interpolate(
x_level_1_compressed, scale_factor=2, mode='nearest')
level_2_resized = x_level_2
# print('level: {}, l1_resized: {}, l2_resized: {}'.format(self.level,
# level_1_resized.shape, level_2_resized.shape))
level_0_weight_v = self.weight_level_0(level_0_resized)
level_1_weight_v = self.weight_level_1(level_1_resized)
level_2_weight_v = self.weight_level_2(level_2_resized)
# print('level_0_weight_v: ', level_0_weight_v.shape)
# print('level_1_weight_v: ', level_1_weight_v.shape)
# print('level_2_weight_v: ', level_2_weight_v.shape)
levels_weight_v = torch.cat(
(level_0_weight_v, level_1_weight_v, level_2_weight_v), 1)
levels_weight = self.weight_levels(levels_weight_v)
levels_weight = F.softmax(levels_weight, dim=1)
fused_out_reduced = level_0_resized * levels_weight[:, 0:1, :, :] + \
level_1_resized * levels_weight[:, 1:2, :, :] + \
level_2_resized * levels_weight[:, 2:, :, :]
out = self.expand(fused_out_reduced)
if self.vis:
return out, levels_weight, fused_out_reduced.sum(dim=1)
else:
return out
二、yolo.py文件中加入加入ASFF_Detect
class ASFF_Detect(nn.Module): #add ASFFV5 layer and Rfb
stride = None # strides computed during build
onnx_dynamic = False # ONNX export parameter
export = False # export mode
def __init__(self, nc=80, anchors=(), ch=(), multiplier=0.5,rfb=False,inplace=True): # detection layer
super().__init__()
self.nc = nc # number of classes
self.no = nc + 5 # number of outputs per anchor
self.nl = len(anchors) # number of detection layers
self.na = len(anchors[0]) // 2 # number of anchors
self.grid = [torch.zeros(1)] * self.nl # init grid
self.l0_fusion = ASFFV5(level=0, multiplier=multiplier,rfb=rfb)
self.l1_fusion = ASFFV5(level=1, multiplier=multiplier,rfb=rfb)
self.l2_fusion = ASFFV5(level=2, multiplier=multiplier,rfb=rfb)
self.anchor_grid = [torch.zeros(1)] * self.nl # init anchor grid
self.register_buffer('anchors', torch.tensor(anchors).float().view(self.nl, -1, 2)) # shape(nl,na,2)
self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output conv
self.inplace = inplace # use in-place ops (e.g. slice assignment)
def forward(self, x):
z = [] # inference output
result=[]
result.append(self.l2_fusion(x))
result.append(self.l1_fusion(x))
result.append(self.l0_fusion(x))
x=result
for i in range(self.nl):
x[i] = self.m[i](x[i]) # conv
bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
if not self.training: # inference
if self.onnx_dynamic or self.grid[i].shape[2:4] != x[i].shape[2:4]:
self.grid[i], self.anchor_grid[i] = self._make_grid(nx, ny, i)
y = x[i].sigmoid()
if self.inplace:
y[..., 0:2] = (y[..., 0:2] * 2 + self.grid[i]) * self.stride[i] # xy
y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
else: # for YOLOv5 on AWS Inferentia https://github.com/ultralytics/yolov5/pull/2953
xy, wh, conf = y.split((2, 2, self.nc + 1), 4) # y.tensor_split((2, 4, 5), 4) # torch 1.8.0
xy = (xy * 2 + self.grid[i]) * self.stride[i] # xy
wh = (wh * 2) ** 2 * self.anchor_grid[i] # wh
y = torch.cat((xy, wh, conf), 4)
z.append(y.view(bs, -1, self.no))
return x if self.training else (torch.cat(z, 1),) if self.export else (torch.cat(z, 1), x)
def _make_grid(self, nx=20, ny=20, i=0,torch_1_10=check_version(torch.__version__, '1.10.0')):
d = self.anchors[i].device
t = self.anchors[i].dtype
shape = 1, self.na, ny, nx, 2 # grid shape
y, x = torch.arange(ny, device=d, dtype=t), torch.arange(nx, device=d, dtype=t)
if torch_1_10: # torch>=1.10.0 meshgrid workaround for torch>=0.7 compatibility
yv, xv = torch.meshgrid(y, x, indexing='ij')
else:
yv, xv = torch.meshgrid(y, x)
grid = torch.stack((xv, yv), 2).expand(shape) - 0.5 # add grid offset, i.e. y = 2.0 * x - 0.5
anchor_grid = (self.anchors[i] * self.stride[i]).view((1, self.na, 1, 1, 2)).expand(shape)
#print(anchor_grid)
return grid, anchor_grid
在yolo.py文件Model类中做如下修改



在yolo.py文件parse_model函数下做如下修改

三、yaml文件中的Detect改为ASFF_Detect

本文转载自: https://blog.csdn.net/m0_56247038/article/details/126741535
版权归原作者 有温度的AI 所有, 如有侵权,请联系我们删除。
版权归原作者 有温度的AI 所有, 如有侵权,请联系我们删除。