
diffusion model是2015年的一篇文章,
https://arxiv.org/pdf/1503.03585.pdf
但是2020年的DDPM之后,才开始逐渐火起来的,
https://arxiv.org/abs/2006.11239
diffusion model
最近Diffusion Model被用在于图片生成模型当中,当前很多的模型都在使用diffusion model作为生成范式,如GLIDE,DALLE2,Imagen,和一系列Image Editing方法等等)。diffusion model相对于VAE、GAN模型的优点在于,其具有更多的可能性。
为什么叫做diffusion model?
diffusion这个词来源于热力学的启发,在热力学里,如果有2个物质混合在一起,分别是高密度的和低密度的,那么高密度的物质就会扩散到低密度,比如喷了香水,随着时间的扩散,最后香水就会充斥着整个房间,最后趋向于平衡。
diffusion model简单理解
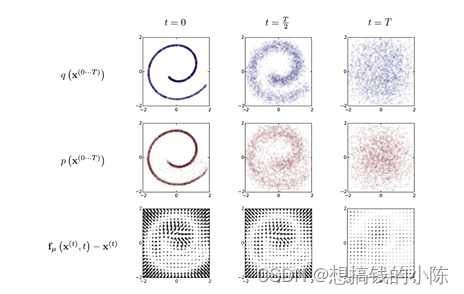
从概念上讲,这个diffusion model很简单,假设你有一个图片,记为X0,如下图,你每次对图像加一点噪声,加一次噪声记为Xt+1,不断对其加噪声,总共加T次以后,得到的图片基本可以说是一个噪声的图片了。我们的目标就是从噪声的图片XT,逆向扩散得到origin image,也就是X0。

forward diffusion正向扩散过程
正向扩散过程就是我们刚才所说的,不断的朝图片加入噪声,通常初始图片我们是知道的,噪声的概率分布我们是知道的(假设服从正太分布),因此用数学公式就可以采用的个固定的markov chain形式,即逐步地向图片添加高斯噪声,每一步的图片只与上一步的图片有关:
其中
因此,模型训练就是从噪声从逆推算回初始的图像。
Reverse diffusion逆向扩散过程
我们的目标就是找到一种方式,或是训练一个网络,能够慢慢的把噪声一点一点的恢复回来。在近两年的做法当中,常见的方法是用U-net。因为reverse diffusion每次的图片的尺寸大小不变,因此U-net是一个很适合的模型。
diffusion model的小总结
这种方式可以看出,有一个致命的缺陷,就是生成模型很慢。因为每一次恢复都只能一步一步的向前恢复,而不像GAN,GAN只要训练好了这个模型,只要给他一个噪声,他就能恢复出图像,做一次的模型forward就够了。
DDPM(Denoising Diffusion Probabilistic Models)
DDPM的思想其实很简单,在reverse diffusion当中,用Xt去预测X-1的图片,但这不好优化,不去优化Xt到Xt-1的转换,而是优化Xt-1到Xt的时候,噪声是怎么加的。只去预测噪声,这有点resnet的意思,本来我们可以直接用x预测y,但直接预测y太难了,应该把其理解为y=x+residual,那我们只需要预测这个residual就可以了 。
同时DDPM还加入了time embedding,time embedding的作用就是告诉U-Net现在reverse diffusion在第几步了,这和transformer中的位置编码一样,这正余弦编码或者是一个傅里叶特征。其给模型带来的提升也是明显的。
但还有一个要加Time embeding的原因是因为,U-net是参数共享的,加入time embedding能够根据不同的输入而生成不同的输出。 我们希望在reverse diffusion的过程中,U-net能先生成一些大概的轮廓,很粗糙的coarse的图像,不需要很清晰。随着reverse diffusion往前走,当在接近还原为原来的图像的时候,我们希望能够学习到物体的边边角角的信息,一些高频信息,这样才能使输出的图片更加逼真。
具体到目标函数,那loss怎么算?
给定xt图像预测Xt-1的图像,那我们的loss就是我们已知的噪声(在前向forward是我们手工加的,所以我们是知道这个噪声的)和预测出来的噪声的差值
其中,代表我们前向forward已知的噪声,
代表的是U-net神经网络,
代表的是当前的输入图片,
代表的是time embedding。
DDPM还有第二个贡献,就是我们只需要预测出加的噪声的均值和方差就可以了,不需要完全预测其正态分布。
------------------------------------2022.8.22补充-------------------
重参数技巧得到迭代公式
我们是如何利用重参数技巧得到每一次高斯噪声的?最开始我以为training的过程是一步一步的计算得到,例如,经过一个encoder得到
,
经过encoder得到
,....,但后面发现不是。forward process添加的噪声是服从高斯分布变换的。这是一个以根号1-βtxt-1为均值,βt为方差的高斯分布。那forward的公式是显示的,那我们就可以直接通过x0,直接得到xt。
每次Xt加噪的公式如下:
表示t时刻的数据分布。
表示t时刻添加的高斯噪音,一般固定是均值为0方差为1的高斯分布。
表示当前时刻分布的均值
表示当前时刻分布的标准差。
因此,我们可以根据公式进行推导:
令,则
于是
...
由上,可以组成一个Xt由X0组成的式子,即
(1)
(注意一下这个公式,后面会有用到)
我们就得到了一个只与X0有关的式子。
diffusion reverse process
如果前向过程是加噪的话,逆向过程就是去噪,我们先来看看论文对逆向过程的定义:
满足高斯分布,均值为带有参数
、以
与
为输入的
,和方差
(PS:这里的
是一个方差符号,不是求和符号),。
我们要求出后验的扩散条件概率,这个扩散条件概率是可以用公式表达的,也就是是说,给定
和
,我们是可以计算出
的。
我们现在开始计算。
=
= =
因为,
和
都服从高斯分布,因此正比于:
把其整理为一元二次方程的形式
这里值得注意的是,也是服从高斯分布的,因此,根据这个公式,我们可以计算出均值和方差。
因为是一个逆向的过程,我们无法知道X0,所以要把X0替换为X_t,根据上面公式1,可以得到公式
=
=
=
=
=
=
=
最后我们得到
(2)
也就是的均值,
我们总结以上的reverse diffusion process的推导,我们得到了:
csdn真的很难用,以后不用csdn了,写的全部丢失
代码
import matplotlib.pyplot as plt
import numpy as np
from sklearn.datasets import make_s_curve
import torch
# TODO 实验数据
s_curve , _ = make_s_curve(10**4 , noise = 0.1)
s_curve = s_curve[:,[0,2] ]/10.0
print("shape of moons :",np.shape(s_curve))
data = s_curve.T
fig,ax = plt.subplots()
ax.scatter(*data ,color='red',edgecolor='white')
ax.axis('off')
plt.show()
dataset = torch.Tensor(s_curve).float() # shape of moons : (10000, 2)
# TODO 确定超参数的值
num_steps = 100 # 可以由beta alpha 分布 均值 标准差 进行估算
# 学习的超参数 动态的在(0,1)之间逐渐增大
betas = torch.linspace(-6,6,num_steps)
betas = torch.sigmoid(betas)* (0.5e-2 - 1e-5) + 1e-5
# 计算 alpha , alpha_prod , alpha_prod_previous , alpha_bar_sqrt 等变量的值
alphas = 1 - betas
alphas_prod = torch.cumprod( alphas ,dim=0 ) # 累积连乘 https://pytorch.org/docs/stable/generated/torch.cumprod.html
alphas_prod_p = torch.cat([torch.tensor([1]).float() ,alphas_prod[:-1]],0) # p means previous
alphas_bar_sqrt = torch.sqrt(alphas_prod)
one_minus_alphas_bar_log = torch.log(1-alphas_prod)
one_minus_alphas_bar_sqrt = torch.sqrt(1-alphas_prod)
assert alphas_prod.shape == alphas_prod.shape == alphas_prod_p.shape \
== alphas_bar_sqrt.shape == one_minus_alphas_bar_log.shape \
== one_minus_alphas_bar_sqrt.shape
print("all the same shape:",betas.shape) #
# TODO 确定扩散过程中任意时刻的采样值
def q_x(x_0 ,t):
noise = torch.randn_like(x_0) # noise 是从正太分布中生成的随机噪声
alphas_t = alphas_bar_sqrt[t] ## 均值 \sqrt{\bar \alpha_t}
alphas_l_m_t = one_minus_alphas_bar_sqrt[t] ## 标准差 \sqrt{ 1 - \bar \alpha_t}
# alphas_t = extract(alphas_bar_sqrt , t, x_0) # 得到sqrt(alphas_bar[t]) ,x_0的作用是传入shape
# alphas_l_m_t = extract(one_minus_alphas_bar_sqrt , t, x_0) # 得到sqrt(1-alphas_bart[t])
return (alphas_t * x_0 + alphas_l_m_t * noise)
# TODO 演示原始数据分布加噪100步后的效果
num_shows = 20
fig , axs = plt.subplots(2,10,figsize=(28,3))
plt.rc('text',color='blue')
# 共有10000个点,每个点包含两个坐标
# 生成100步以内每隔5步加噪声后的图像
for i in range(num_shows):
j = i // 10
k = i % 10
t = i*num_steps//num_shows # t=i*5
q_i = q_x(dataset ,torch.tensor( [t] )) # 使用刚才定义的扩散函数,生成t时刻的采样数据 x_0为dataset
axs[j,k].scatter(q_i[:,0],q_i[:,1],color='red',edgecolor='white')
axs[j,k].set_axis_off()
axs[j,k].set_title('$q(\mathbf{x}_{'+str(i*num_steps//num_shows)+'})$')
plt.show()
# TODO 编写拟合逆扩散过程 高斯分布 的模型
# \varepsilon_\theta(x_0,t)
import torch
import torch.nn as nn
class MLPDiffusion(nn.Module):
def __init__(self,n_steps,num_units=128):
super(MLPDiffusion,self).__init__()
self.linears = nn.ModuleList([
nn.Linear(2,num_units),
nn.ReLU(),
nn.Linear(num_units,num_units),
nn.ReLU(),
nn.Linear(num_units, num_units),
nn.ReLU(),
nn.Linear(num_units, 2),]
)
self.step_embeddings = nn.ModuleList([
nn.Embedding(n_steps,num_units),
nn.Embedding(n_steps, num_units),
nn.Embedding(n_steps, num_units)
])
def forward(self,x,t):
for idx,embedding_layer in enumerate(self.step_embeddings):
t_embedding = embedding_layer(t)
x = self.linears[2*idx](x)
x += t_embedding
x = self.linears[2*idx +1](x)
x = self.linears[-1](x)
return x
# TODO loss 使用最简单的 loss
def diffusion_loss_fn(model,x_0,alphas_bar_sqrt,one_minus_alphas_bar_sqrt,n_steps):# n_steps 用于随机生成t
'''对任意时刻t进行采样计算loss'''
batch_size = x_0.shape[0]
# 随机采样一个时刻t,为了体检训练效率,需确保t不重复
# weights = torch.ones(n_steps).expand(batch_size,-1)
# t = torch.multinomial(weights,num_samples=1,replacement=False) # [barch_size, 1]
t = torch.randint(0,n_steps,size=(batch_size//2,)) # 先生成一半
t = torch.cat([t,n_steps-1-t],dim=0) # 【batchsize,1】
t = t.unsqueeze(-1)# batchsieze
# print(t.shape)
# x0的系数
a = alphas_bar_sqrt[t]
# 生成的随机噪音eps
e = torch.randn_like(x_0)
# eps的系数
aml = one_minus_alphas_bar_sqrt[t]
# 构造模型的输入
x = x_0* a + e *aml
# 送入模型,得到t时刻的随机噪声预测值
output = model(x,t.squeeze(-1))
# 与真实噪声一起计算误差,求平均值
return (e-output).square().mean()
# TODO 编写逆扩散采样函数(inference过程)
def p_sample_loop(model ,shape ,n_steps,betas ,one_minus_alphas_bar_sqrt):
'''从x[T]恢复x[T-1],x[T-2],……,x[0]'''
cur_x = torch.randn(shape)
x_seq = [cur_x]
for i in reversed(range(n_steps)):
cur_x = p_sample(model,cur_x, i ,betas,one_minus_alphas_bar_sqrt)
x_seq.append(cur_x)
return x_seq
def p_sample(model,x,t,betas,one_minus_alphas_bar_sqrt):
'''从x[T]采样时刻t的重构值'''
t = torch.tensor(t)
coeff = betas[t] / one_minus_alphas_bar_sqrt[t]
eps_theta = model(x,t)
mean = (1/(1-betas[t].sqrt()) * (x-(coeff * eps_theta)))
z = torch.randn_like(x)
sigma_t = betas[t].sqrt()
sample = mean + sigma_t * z
return (sample)
# TODO 模型的训练
seed = 1234
class EMA():
'''构建一个参数平滑器'''
def __init__(self,mu = 0.01):
self.mu =mu
self.shadow = {}
def register(self,name,val):
self.shadow[name] = val.clone()
def __call__(self, name, x): # call函数?
assert name in self.shadow
new_average = self.mu * x +(1.0 -self.mu) * self.shadow[name]
self.shadow[name] = new_average.clone()
return new_average
print('Training model ……')
'''
'''
batch_size = 128
dataloader = torch.utils.data.DataLoader(dataset,batch_size=batch_size,shuffle = True)
num_epoch = 4000
plt.rc('text',color='blue')
model = MLPDiffusion(num_steps) # 输出维度是2 输入是x 和 step
optimizer = torch.optim.Adam(model.parameters(),lr = 1e-3)
for t in range(num_epoch):
for idx,batch_x in enumerate(dataloader):
loss = diffusion_loss_fn(model,batch_x,alphas_bar_sqrt,one_minus_alphas_bar_sqrt,num_steps)
optimizer.zero_grad()
loss.backward()
torch.nn.utils.clip_grad_norm(model.parameters(),1.) #
optimizer.step()
# for name ,param in model.named_parameters():
# if params.requires_grad:
# param.data = ems(name,param.data)
# print loss
if (t% 100 == 0):
print(loss)
x_seq = p_sample_loop(model,dataset.shape,num_steps,betas,one_minus_alphas_bar_sqrt)# 共有100个元素
fig ,axs = plt.subplots(1,10,figsize=(28,3))
for i in range(1,11):
cur_x = x_seq[i*10].detach()
axs[i-1].scatter(cur_x[:,0],cur_x[:,1],color='red',edgecolor='white');
axs[i-1].set_axis_off()
axs[i-1].set_title('$q(\mathbf{x}_{'+str(i*10)+'})$')
版权归原作者 其实也很简单 所有, 如有侵权,请联系我们删除。