
前言
Linux下安装ROS真是太多坑了,如何在Linux下安装ROS呢?博主带你少走弯路!
首先,简要介绍Ubuntu与ROS版本对应关系,如下所示:
UbuntuROS 1.0ROS 2.016.04 LTSKinetic LTSArdent18.04 LTSMelodic LTSDashing LTS20.04 LTSNoetic LTSFoxy LTS
第一步:配置软件源
进入到Ubuntu系统
操作流程:打开设置➡软件与更新➡选择源
1.打开设置

2.打开软件与更新
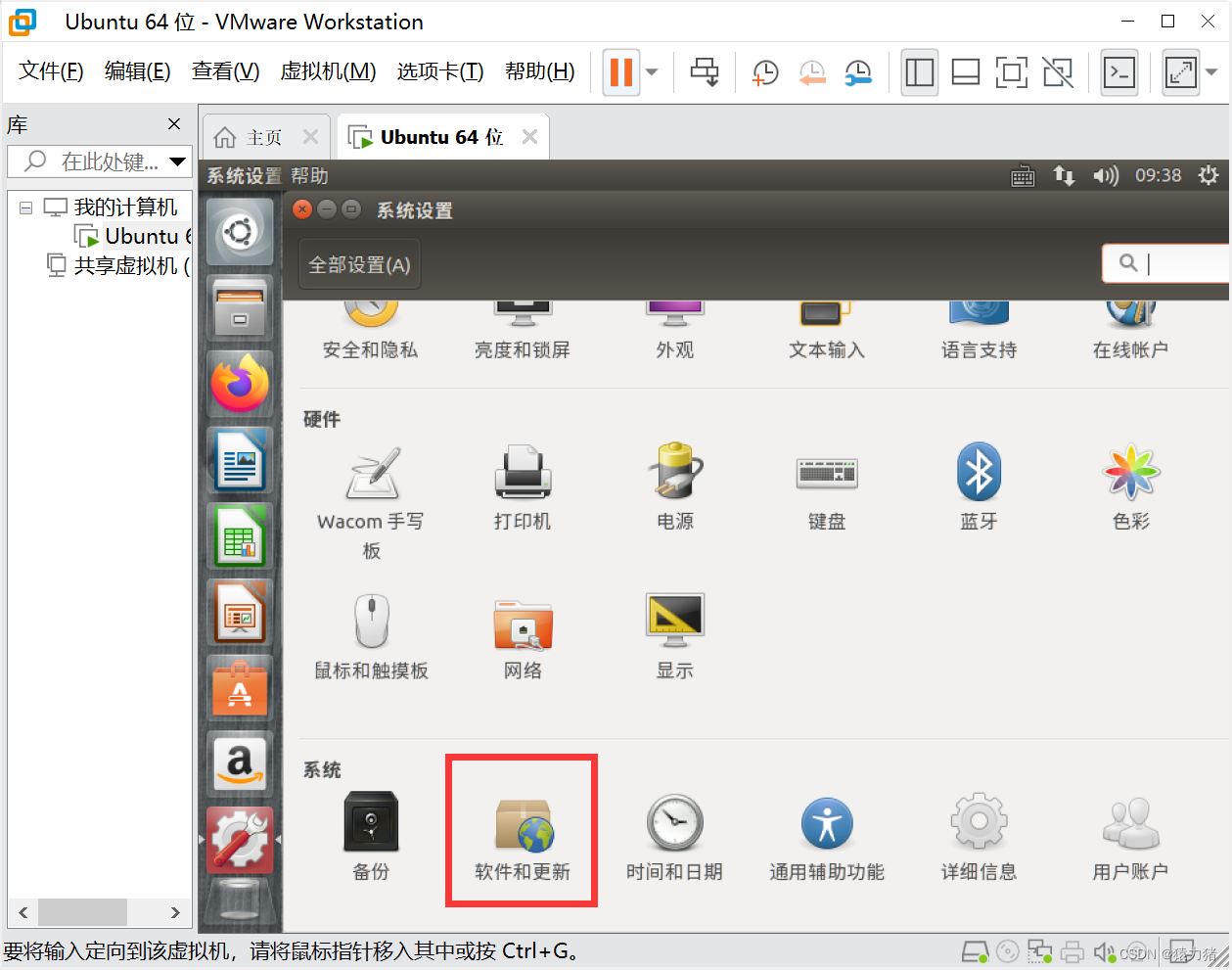
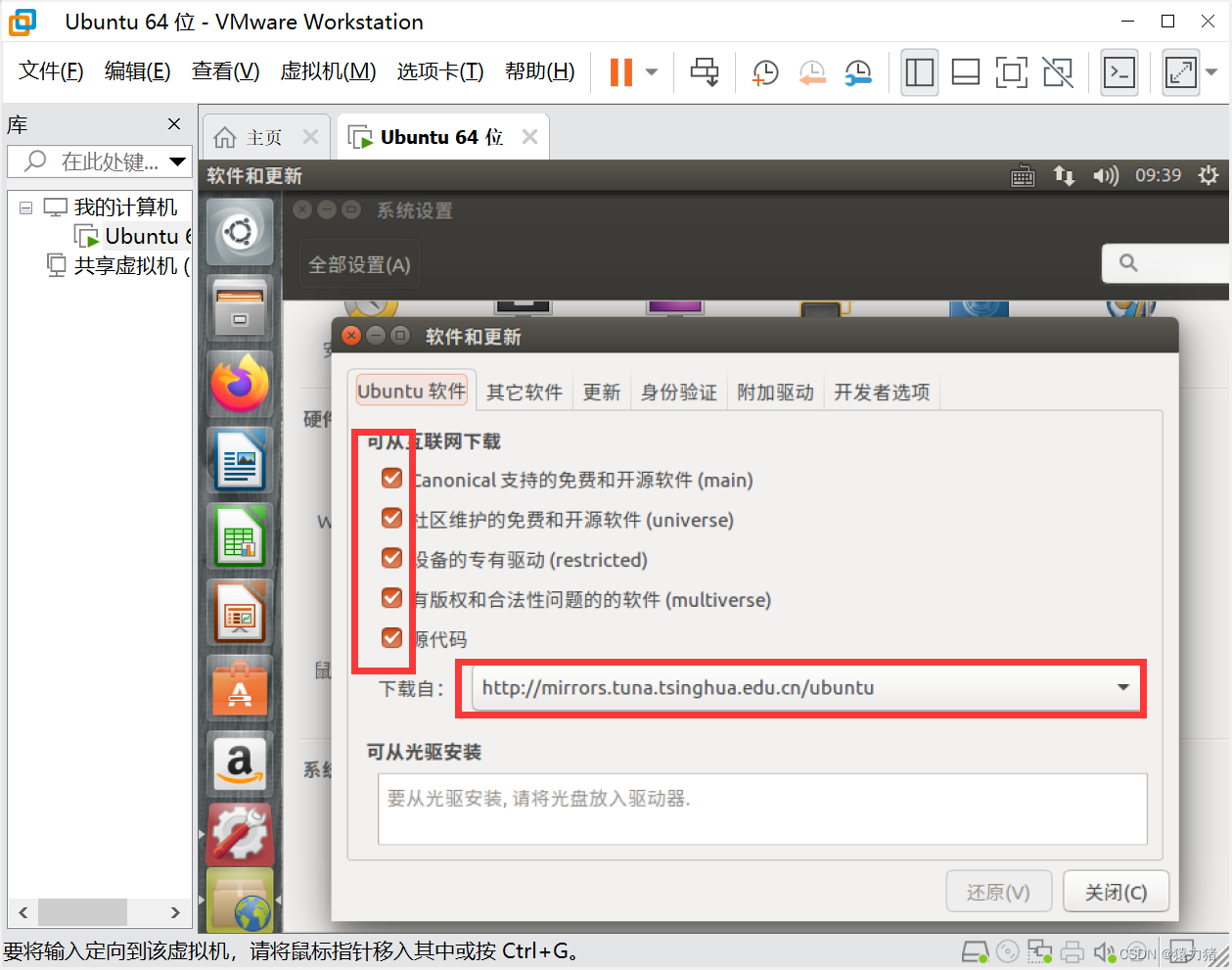
3.选源
这边把左侧的勾全部勾选上,然后在 下载自:选择下载源 (这边选择的是清华源)>等待更新
第二步:设置sources.list
在Linux安装软件,需要通过源列表来寻找对应的软件,默认软件列表没有ROS,因此我们需要 packags.ros.org 这个网站配置一下软件仓库列表,才能安装我们的目标ROS。
- 国外
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
下载速度比较慢,建议使用国内的(中科大or清华)
- 中科大
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
- 清华
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
设置成功!

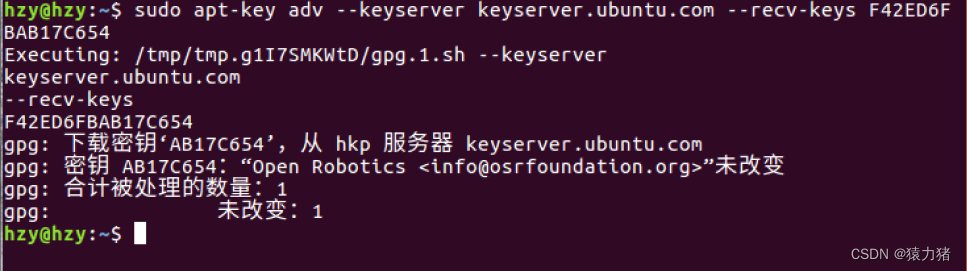
第三步:设置密钥
新的软件源添加到 Ubuntu 当中,需要使其信任
密钥:
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654
设置密钥成功!
第四步:正式安装ROS
1.更新Ubuntu 功能包列表
获取到sourse.list下的所有软件包的信息
sudo apt-get update
更新成功!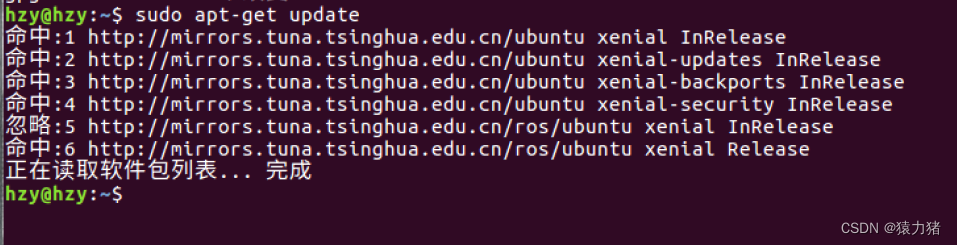
2.安装ROS Kinect
选择安装桌面完整版
这边下载时间比较长,正常10-20分钟,清华源还是挺快的亲测十多分钟
sudo apt-get install ros-kinetic-desktop-full
下载成功!
3.查看包
apt-cache search ros-kinetic
包这边一大堆,就不做完整展示了(部分展示如下)

可以打开文件夹(自己的下载路径),如果没有更改下载路径,默认在opt下
打开就可以看到我们的ROS装上啦!
第五步:配置ROS到系统
1.初始化rosdep
sudo rosdep init
2.更新rosdep
rosdep update
完成安装ROS全部安装工作 撒花!
报错解决1

若出现以上问题,请尝试以下方法:
输入命令行
sudo pip install rosdepc
如果显示没有pip可以试试pip3
sudo pip3 install rosdepc
如果pip3还没有
sudo apt-get install python3-pip
sudo pip install rosdepc
装载pip成功!

初始化rosdepc:
sudo rosdepc init
rosdepc更新:
rosdepc update
到此步结束,完美搞定!!!!
在此感谢一下博主 **枫叶爱锋 **
博主查阅了CSDN上99%的方法,都以失败告终,最后此方法亲测完美解决!!!!!!!!
附上链接:rosdep init/rosdep update终极解决办法,包成功!!!_枫叶爱锋的博客-CSDN博客
第六步:测试(键控小海龟移动)
这边我们测试一下ROS能否进行运作(分为三个主要的命令行,需要依次分开执行!)
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
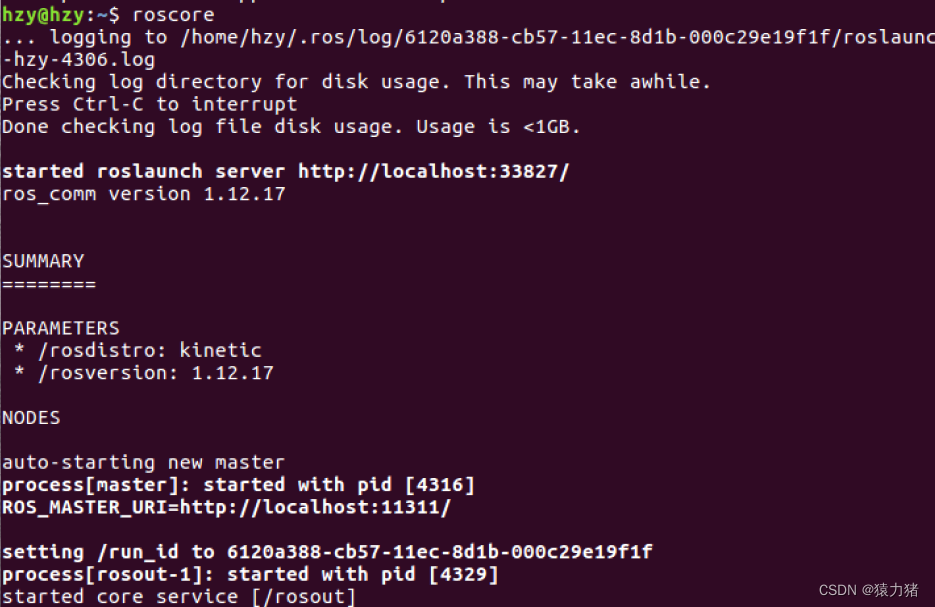
1.输入第一行指令
roscore
成功打开!
若输入第一行指令报错
报错解决2

终端输入以下指令:
gedit ~/.bashrc
在此文档下加入红色框选中的三行!
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:/home/siat/ccny/ccny_vision:/home/siat/catkin_ws/src
export ROS_HOSTNAME=localhost
export ROS_MASTER_URI=http://localhost:11311
点击保存(ctrl+s)
在重复操作,直到ROS被启动!
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source .bashrc
roscore
附上解决链接:程序“roscore”尚未安装。 您可以使用以下命令安装: sudo apt install python-roslaunch ,找回ros系统_Curb的博客-CSDN博客_roscore找不到
2.输入第二行指令
如下所示,小海龟界面可以出来了
rosrun turtlesim turtlesim_node

3. 输入第三行指令
rosrun turtlesim turtle_teleop_key
如果方向键能够正常控制小乌龟的移动,则说明测试成功!
PS:第三个指令光标一定要在这个界面上!

键盘 ↑ ↓ ← → 移动小海龟
到此,安装ROS的全部步骤完成!撒花!!!!!!!
参考:
rosdep init/rosdep update终极解决办法,包成功!!!_枫叶爱锋的博客-CSDN博客程序“roscore”尚未安装。 您可以使用以下命令安装: sudo apt install python-roslaunch ,找回ros系统_Curb的博客-CSDN博客_roscore找不到rosdep init/rosdep update终极解决办法,包成功!!!_枫叶爱锋的博客-CSDN博客
Ubuntu18.04 安装 ROS Melodic_XiaoMu-1230的博客-CSDN博客_ubuntu18.04安装ros
版权归原作者 猿力猪 所有, 如有侵权,请联系我们删除。