
1 包介绍
torch.distributions包包含可参数化的概率分布和采样函数。 这允许构建用于优化的随机计算图和随机梯度估计器。
** 不可能通过随机样本直接反向传播。 **但是,有两种主要方法可以创建可以反向传播的代理函数。
这些是
- 评分函数估计量 score function estimato
- 似然比估计量 likelihood ratio estimator
- REINFORCE
- 路径导数估计量 pathwise derivative estimator
REINFORCE 通常被视为强化学习中策略梯度方法的基础,
路径导数估计器常见于变分自编码器的重新参数化技巧中。
虽然评分函数只需要样本 f(x)的值,但路径导数需要导数 f'(x)。、
1.1 REINFORCE
我们以reinforce 为例:
当概率密度函数关于其参数可微时,我们只需要 sample() 和 log_prob() 来实现 REINFORCE: 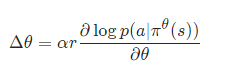 其中θ是参数,α是学习率,r是奖励,是在状态s的时候,根据策略使用动作a的概率 (这个也就是policy gradient)强化学习笔记:Policy-based Approach_UQI-LIUWJ的博客-CSDN博客
在实践中,我们会从网络的输出中采样一个动作,在一个环境中应用这个动作,然后使用 log_prob 构造一个等效的损失函数。
对于分类策略,实现 REINFORCE 的代码如下:(这只是一个示意代码,跑不起来的)
probs = policy_network(state)
#在状态state的时候,各个action的概率
m = Categorical(probs)
#分类概率
action = m.sample()
#采样一个action
next_state, reward = env.step(action)
#这里为了简化考虑,一个episode只有一个action
loss = -m.log_prob(action) * reward
#m.log_prob(action) 就是 logp
#reward就是前面的r
#这里用负号是因为强化学习是梯度上升
loss.backward()
2 包所涉及的类
2.1 伯努利分布

torch.distributions.bernoulli.Bernoulli(
probs=None,
logits=None,
validate_args=None)
创建由 probs 或 logits(但不是两者同时)参数化的伯努利分布。
样本是二进制的(0 或 1)。 它们取值 1 的概率为 p,取值 0 的概率为 1 - p。
2.1.1 参数
probs (Number,Tensor) 采样概率**logits (Number,Tensor) 采样的对数几率
2.1.2 函数 & 属性
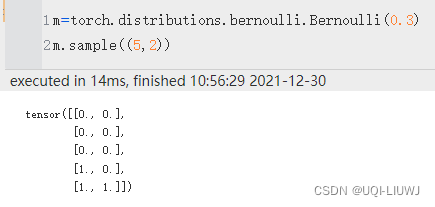
sample()
采样,默认采样一个值

还可以按照shape 采样
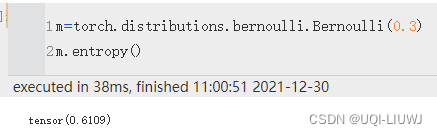
entropy
()
计算熵
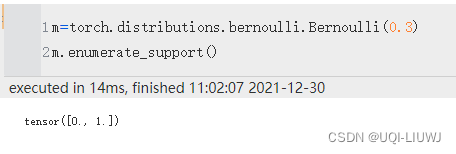
enumerate_support()
返回包含离散分布支持的所有值的张量。 结果将在维度 0 上枚举
mean
均值
probs, logits两个输入的参数param_shape
参数的形状
variance
方差
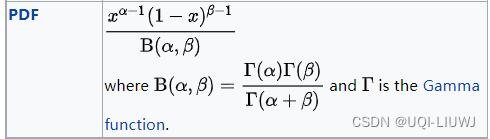
2.2 贝塔分布
torch.distributions.beta.Beta(
concentration1,
concentration0,
validate_args=None)
由concentration 1 (α)和concentration 0 (β)参数化的 Beta 分布。
2.2.1 函数
采样
默认是采样一个值,也可以设置采样的维数
entropy
计算熵
rsample
(sample_shape)
如果分布参数是批处理的,则生成一个 sample_shape 形状的重新参数化样本或 sample_shape 形状的重新参数化样本批次。
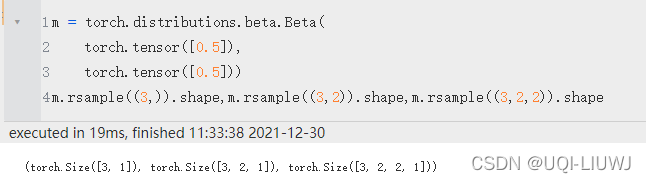
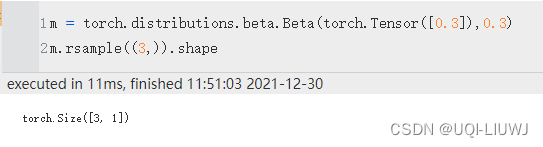
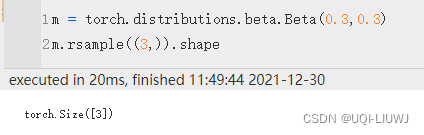
注:生成Beta分布的时候,两个参数必须至少有一个是Tensor,否则rsample效果失效
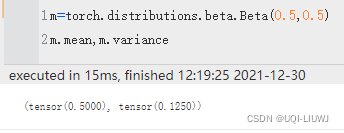
mean,variance
均值 & 方差
2.3 Chi2 分布
torch.distributions.chi2.Chi2(
df,
validate_args=None)

它只有sample一个函数
2.4 连续伯努利
参数和伯努利很类似
torch.distributions.continuous_bernoulli.ContinuousBernoulli(
probs=None,
logits=None,
lims=(0.499, 0.501),
validate_args=None)
请注意,与伯努利不同,这里的“probs”不对应于伯努利的“probs”,这里的“logits”不对应于伯努利的“logits”,但由于与伯努利的相似性,使用了相同的名称。

2.4.1 函数
sample还是采样 cdf
cdf
返回以 value 计算的累积概率密度函数。
icdf
返回以 value 计算的逆累积密度/质量函数。
entropy
还是计算熵
rsample
如果分布参数是批处理的,则生成一个 sample_shape 形状的重新参数化样本或 sample_shape 形状的重新参数化样本批次。
和前面Beta分布类似,只有创建时参数为Tensor,才会有rsample效果

mean,variance均值 方差
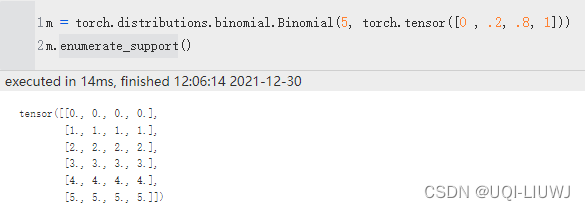
2.5 二项分布
torch.distributions.binomial.Binomial(
total_count=1,
probs=None,
logits=None,
validate_args=None)
创建由 total_count 和 probs 或 logits(但不是两者)参数化的二项分布。 total_count 必须可以用 probs/logits 广播。
2.5.1 函数&参数
sample
采样
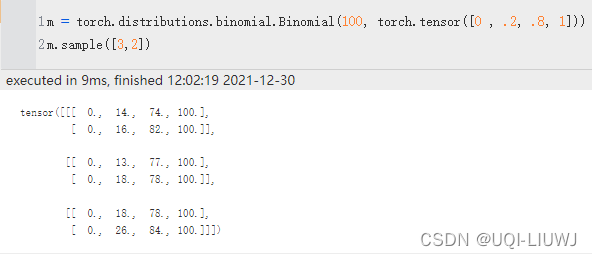
100被广播到0,0.2,0.8,1 所以每次相当于是四个二项分布
enumerate_support
返回包含离散分布支持的所有值的张量。 结果将在维度 0 上枚举
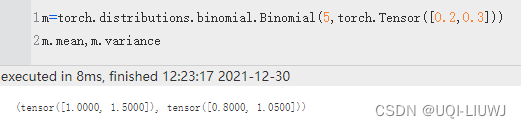
mean,variance
均值,方差
2.6 分类分布
torch.distributions.categorical.Categorical(
probs=None,
logits=None,
validate_args=None)
样本是来{0,...,K−1} 的整数,其中 K 是 probs.size(-1)。
2.6.1 函数
sample采样
entropy
熵

enumerate_support
返回包含离散分布支持的所有值的张量。 结果将在维度 0 上枚举

2.6.2 注意:
创建分类分布时候的Tensor中元素的和可以不是1,最后归一化到1即可
import torch
import math
m=torch.distributions.Categorical(torch.Tensor([1,2,4]))
m.enumerate_support()
#tensor([0, 1, 2])
m.probs
#tensor([0.1429, 0.2857, 0.5714])
3 log_probs
很多分类都有这样一个函数log_probs,我们就统一说一下
假设m是一个torch的分类,那么m.log_prob(action)相当于
probs.log()[0][action.item()].unsqueeze(0)
(对这个action的概率添加log操作)
import torch
import math
m=torch.distributions.Categorical(torch.Tensor([1,2,4]))
m.enumerate_support()
#tensor([0, 1, 2])
a=m.sample()
a
#tensor(2)
m.probs
#tensor([0.1429, 0.2857, 0.5714])
m.probs.log()
#tensor([-1.9459, -1.2528, -0.5596])
m.log_prob(a)
#tensor(-0.5596)
m.probs.log()[a.item()]
#tensor(-0.5596)
版权归原作者 UQI-LIUWJ 所有, 如有侵权,请联系我们删除。