
在快节奏的现代生活中,垃圾分类已经成为一项重要的环保举措。然而,面对日益复杂的垃圾种类和繁多的分类标准,许多人感到困惑和无奈。幸运的是,随着人工智能技术的飞速发展,AI深度学习模型为垃圾分类带来了革命性的变化。垃圾分类不仅是环保的重要一环,更是培养公众环保意识、促进可持续发展的重要手段。然而,由于分类标准的复杂性、公众认知的不足以及管理上的困难,垃圾分类的推进面临诸多挑战。传统的垃圾分类方法往往依赖于人工识别和投放,这不仅效率低下,而且容易出现错误,导致分类效果不佳。AI深度学习模型以其强大的图像识别和处理能力,为垃圾分类提供了新的解决方案。通过训练大量的垃圾图像数据,深度学习模型可以学习到各种垃圾的特征和分类规则,从而实现对未知垃圾的自动化识别和分类。在实际应用中,用户只需将不确定如何分类的垃圾放在摄像头前,AI系统便能够迅速识别并给出正确的分类建议。这不仅提高了分类的准确性和效率,也大大减轻了人工分类的负担。AI垃圾分类的优势在于其高效性、准确性和可扩展性。通过自动化识别和分类,AI系统能够迅速处理大量的垃圾数据,并给出准确的分类结果。同时,随着技术的不断进步和数据的不断积累,AI系统的分类能力也将不断提升。
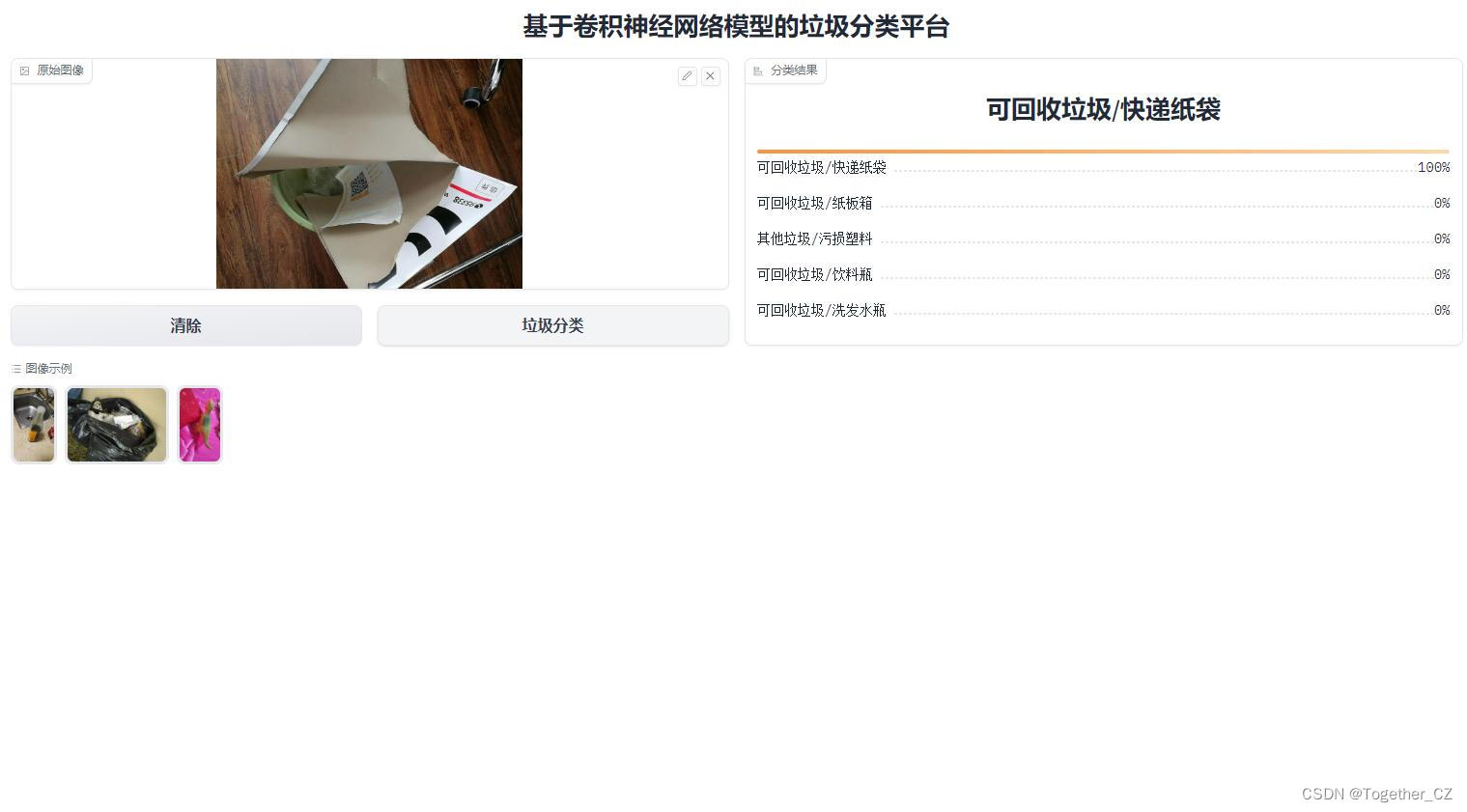
本文的主要目的是想要从实验性的角度出发,来探索分析此想法的可行性,首先看下实例效果:
图像识别任务发展至今诞生了众多出色的模型,而卷积神经网络模型是其中最为闪耀的新星,CNN从LeNet开始发展演变不停地迭代更新,出现了众多优秀的算法模型,下面简单来总结回归一下:
- LeNet: - LeNet是卷积神经网络的早期代表,由Yann LeCun等人于1998年提出,主要用于手写数字识别。- 它的基础结构包括卷积层、池化层和全连接层。卷积层用于提取图像特征,池化层用于降低特征图的维度并减少参数数量,全连接层则用于分类。- LeNet结构简单,计算量小,适合处理小型图像数据。
- AlexNet: - AlexNet由Alex Krizhevsky等人于2012年提出,赢得了当年的ImageNet竞赛冠军。- 它首次在CNN中成功应用了ReLU激活函数、Dropout和LRN等技术,并使用GPU进行加速。- AlexNet将LeNet的思想发扬光大,把CNN的基本原理应用到了更深更宽的网络中,推动了深度学习的发展。
- VGG: - VGG由牛津大学的Visual Geometry Group于2014年提出,是ILSVRC竞赛的亚军。- VGG的特点是使用小卷积核(3x3)和小池化核(2x2)来构建深层的网络结构,同时保持计算量的增加放缓。- VGG在多个迁移学习任务中的表现优秀,但在参数量上较大,需要更多的存储空间。
- ResNet: - ResNet由Kaiming He等人于2015年提出,解决了深度神经网络在训练过程中出现的梯度消失和模型退化问题。- ResNet的核心思想是通过引入残差连接来构建深度神经网络,使得网络能够训练得更深而不会导致性能下降。- ResNet在多个图像识别任务中都取得了出色的性能,是深度学习领域的重要里程碑之一。
- DenseNet: - DenseNet由Huang Gao等人于2017年提出,主要思想是密集连接。- 在DenseNet中,每个层都与前面所有层直接连接,使得信息能够更快地传播,并允许网络在更早的阶段融合不同层的特征。- DenseNet解决了梯度消失问题,提高了网络的性能,并减少了需要训练的参数数量。
- Xception: - Xception模型由Google的研究人员于2017年提出,是基于深度可分离卷积的Inception V3的改进版本。- Xception将传统的卷积操作分解为深度卷积和逐点卷积两个步骤,以减少计算量和参数数量。- Xception通过更高效地利用计算资源,获得了更好的性能。
- Inception: - Inception模型也是由Google的研究人员开发,其核心思想是通过使用不同大小的卷积核来并行提取图像的不同特征,并将这些特征融合在一起。- Inception模型可以捕捉图像中不同尺度的信息,提高了模型的表达能力和鲁棒性。- Inception模型在ImageNet竞赛中取得了优异的成绩,并广泛应用于各种图像识别任务。
- MobileNet: - MobileNet是一个轻量级的卷积神经网络模型,由Google的研究人员于2017年提出,专为移动和嵌入式视觉应用设计。- MobileNet使用深度可分离卷积来减少计算量和模型大小,同时保持较高的性能。- MobileNet可以在有限的计算资源下实现快速和准确的图像识别,因此广泛应用于移动设备和嵌入式系统中。
本文的主要选型是基于经典的ResNet模型来进行的。ResNet模型是一种在图像识别领域中具有重大影响的深度卷积神经网络模型,它的全称是深度残差网络(Deep Residual Network)。该模型由微软研究院的Kaiming He等人在2015年提出,旨在解决深度神经网络在训练过程中出现的梯度消失和模型退化问题。
ResNet模型的核心思想是通过引入残差连接(Residual Connection)来构建深度神经网络。残差连接允许网络在训练过程中学习主要关注差异和错误,而不需要全部从头开始重建,从而提高了模型的学习能力和训练速度。在ResNet模型中,每个残差块都由一组卷积层和池化层组成,通过引入卷积和池化操作,提取图像的特征。
ResNet模型的主要组成部分包括残差块、池化层和全连接层。其中,残差块是ResNet模型的核心部分,它通过引入残差使得网络能够更好地适应图像的特征,避免了过拟合问题。每个残差块都由恒等映射(Identity Mapping)和残差映射(Residual Mapping)组成。恒等映射即将输入直接传递到输出,而残差映射则对输入进行非线性变换,并与恒等映射相加,从而形成残差。这样的设计使得模型可以学习到残差,即剩余的映射,而不仅仅是对输入的变换。
ResNet模型的特点是使用残差模块和残差连接来构建网络,这使得它可以训练更深的网络而不会出现梯度消失的问题。ResNet的优点包括:
- 可以训练非常深的神经网络,避免了梯度消失问题,提高了模型的表达能力和性能。
- 使用残差连接可以保留原始特征,使得网络的学习更加顺畅和稳定,进一步提高了模型的精度和泛化能力。
- 训练时可以避免梯度消失和梯度爆炸问题,加速网络收敛。
然而,ResNet模型也存在一些缺点:
- 需要大量的计算资源来训练和推理,特别是在网络较深时。
- 在某些情况下,ResNet可能会过拟合,需要通过正则化等方法进行处理。
ResNet模型在图像识别领域取得了巨大的成功,并被广泛应用于图像分类、目标检测、物体识别等计算机视觉任务中。它的出现极大地推动了深度学习领域的发展,并为后续的研究提供了重要的参考和启示。
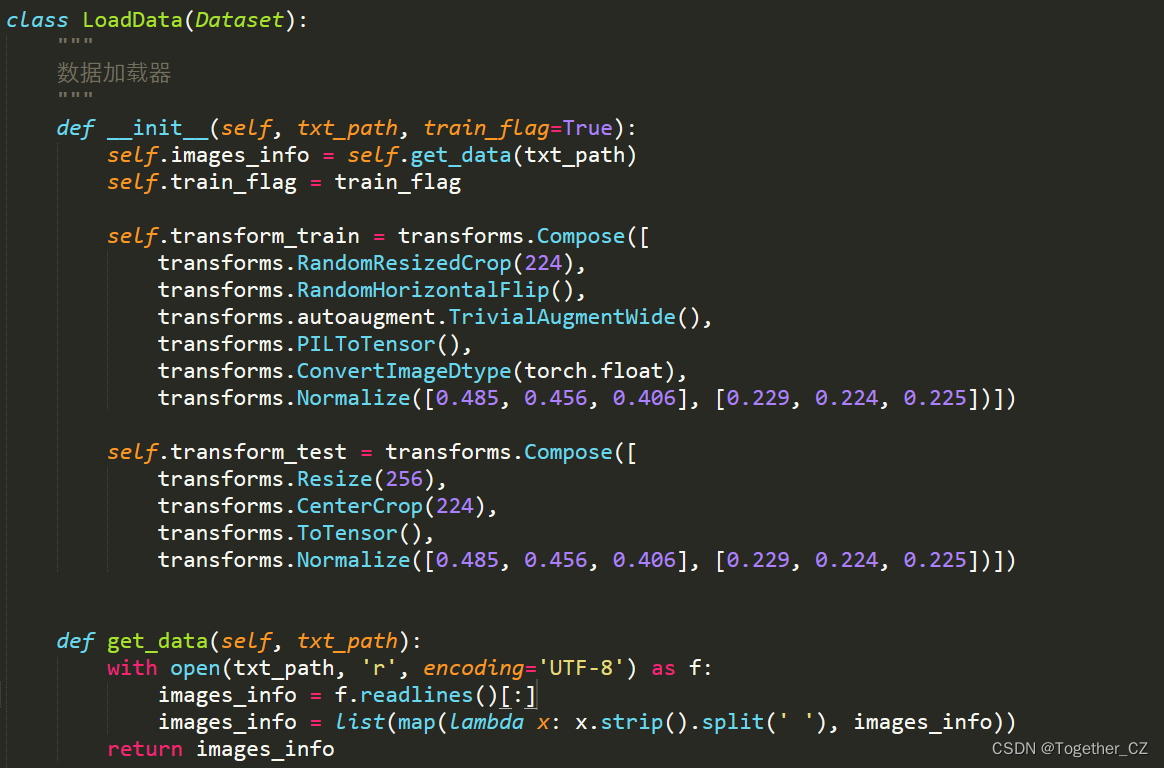
首先来看数据加载器的视线,借助于torch可以很方便实现,这里就不再赘述了:
这里模型的搭建初始化可以选择自己实现ResNet模型的源代码,然后加载数据集进行模型的开发训练,也可以选择直接使用torch内置的算法模型,我们此处选择的是后者,如下:
model = models.resnet18(pretrained=True)
model = models.resnet34(pretrained=True)
model = models.resnet50(pretrained=True)
model = models.resnet152(pretrained=True)
根据自己的算力选择对应大小的参数模型即可,这里我是基于本地cpu训练的,为了降低对系统的压力,我选择的是resnet18模型,也就是参数量最小的那个。
之后加载数据:
train_loader = torch.utils.data.DataLoader(
dataset=train_set, batch_size=BATCH_SIZE, shuffle=True)
test_loader = torch.utils.data.DataLoader(
dataset=test_set, batch_size=BATCH_SIZE, shuffle=False)
迭代开始训练:
batch_iter = len(train_loader)
for epoch in range(EPOCHS):
model.train()
train_loss = 0.0
batch_loss = 0.0
batch_accuracy = 0.0
for index, (inputs, targets) in enumerate(tqdm(train_loader)):
inputs, targets = inputs.to(DEVICE), targets.to(DEVICE)
outputs = model(inputs)
loss = criterion(outputs, targets)
optimizer.zero_grad()
loss.backward()
optimizer.step()
batch_loss = loss.item()
train_loss += batch_loss
batch_accuracy = predict.eq(targets.data).sum().float() / BATCH_SIZE
train_step = len(train_loader) * epoch + index + 1
train_loss /= train_length
model.eval()
with torch.no_grad():
for index, (inputs, targets) in enumerate(tqdm(test_loader)):
inputs, targets = inputs.to(DEVICE), targets.to(DEVICE)
outputs = model(inputs)
count += targets.size(0)
correct += (predict == targets).sum().item()
accuracy = correct / (count + 1e-10)
if accuracy > ACCURACY:
ACCURACY = accuracy
model_path_best = 'checkpoint/checkpoint_best.pth'
torch.save(model, model_path_best)
print('EPOCH {}, Best Accuracy: {}/{}={:.4f}'.format(epoch + 1, correct, count, accuracy))
epoch += 1
终端输出如下:

这里为了节省时间,我们设定的是50个epoch,训练完成如下:


训练完成后,本地得到了可用的模型权重,如下
其中,checkpoint_best.pth就是我们最终训练得到的最优的模型权重。
之后就可以加载训练好的模型来对测试数据集进行测试分析了,核心实现如下:
transform_test = transforms.Compose([
transforms.Resize(256),
transforms.CenterCrop(224),
transforms.ToTensor(),
transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])])
model = torch.load(model_path, map_location=torch.device(device))
model.to(device)
model.eval()
correct = 0
for index, image_path in enumerate(tqdm(images_path)):
image = Image.open(image_path).convert("RGB")
with torch.no_grad():
image_tensor = transform_test(image).unsqueeze(0)
outputs = model(image_tensor.to(device))
predicts.append(predict.item())
label_new.append(images_label[index])
if int(predict) == int(images_label[index]):
correct += 1
line = '{} {} {}\n'.format(image_path, images_label[index], predict.item())
line_list.append(line)
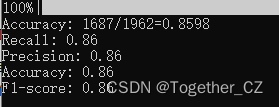
print('Accuracy: {}/{}={:.4f}'.format(correct, number, correct / number))
测试评估完成后,我们绘制了测试评估的混淆矩阵,如下:
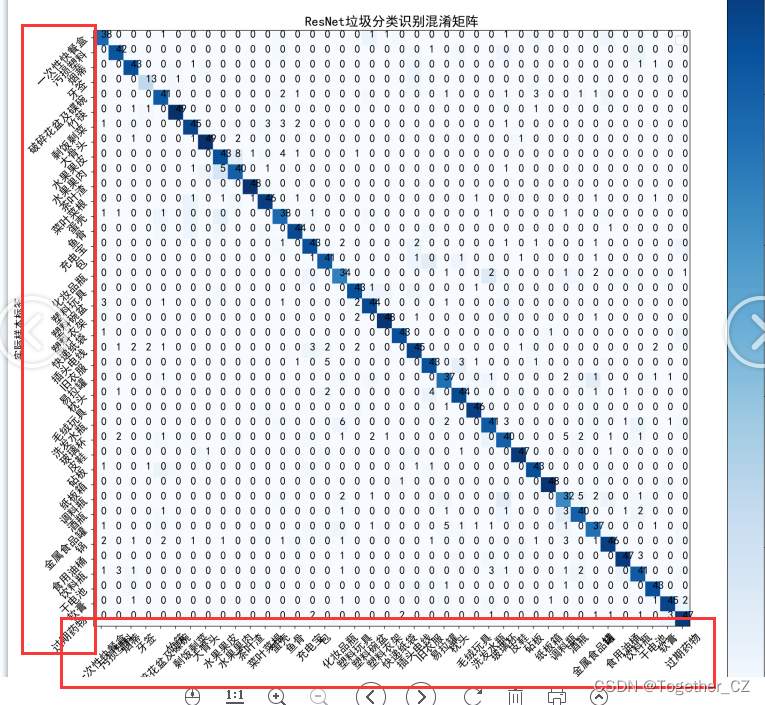
这里因为一些类别的中文标签比较长,直接绘制坐标轴显示的话会出现重叠的现象,所以这里我们选择对其坐标走刻度显示值进行了45°的旋转处理,可以看到旋转处理后的显示效果还是比较理想的。
常用评估指标计算结果如下:
如果自己有时间的话可以多做几款模型进行指标的对比分析,绘制对比柱状图也是蛮不错的,到这里我们的开发工作就结束了,最后借助于可视化系统组件的方式来开发了可视化平台,实例效果如下:

在未来,AI垃圾分类将有望在更多领域得到应用,如智能回收站、无人驾驶垃圾车等。这些应用将进一步推动垃圾分类的智能化和自动化水平,为环保事业贡献更多力量。AI深度学习模型在垃圾分类中的应用是环保领域的一次重要创新。它不仅解决了传统垃圾分类方法中的难题,也为我们带来了更加便捷、高效和准确的分类体验。随着技术的不断进步和应用的不断拓展,AI垃圾分类将在未来发挥更加重要的作用,为我们创造一个更加美好的生态环境。让我们携手共进,共同为环保事业贡献自己的力量。
版权归原作者 Together_CZ 所有, 如有侵权,请联系我们删除。