
1 Cartographer安装(Ubuntu8.04 melodic)
参考链接:
1.1 安装依赖包
- sudo apt-get update
- sudo apt-get install -y google-mock libboost-all-dev libeigen3-dev libgflags-dev libgoogle-glog-dev liblua5.2-dev libprotobuf-dev libsuitesparse-dev libwebp-dev ninja-build protobuf-compiler python-sphinx ros-melodic-tf2-eigen libatlas-base-dev libsuitesparse-dev liblapack-dev
- sudo apt-get install -y python-wstool python-rosdep ninja-build stow
1.2 安装cartographer、cartographer_ros和ceres_solver
1.2.1 初始化工作空间(这里与参考链接保持一致,命名为catkin_google_ws)
- mkdir catkin_google_ws
- cd catkin_google_ws
- wstool init src
1.2.2 从原作者的gitee上下载安装cartographer和cartographer_ros
- cd src
- git clone https://gitee.com/liu_xiao_eu/cartographer.git
- git clone https://gitee.com/liu_xiao_eu/cartographer_ros.git
1.2.3 在上述创建好的src文件夹下,获取ceres-solver源码
个人感觉没必要在src文件夹下安装,因为安装的ceres-solver会自动写入系统环境中,保持一致,我们在catkin_google_ws/src文件夹下,获取ceres-solver源码,版本要1.13.0。
wget ceres-solver.org/ceres-solver-1.13.0.tar.gz
编译:
- cd ceres-solver-1.13.0
- mkdir build
- cd build
- cmake ..
- make
测试一下,然后安装
- make test
- sudo make install
1.2.4 安装cartographer_ros的依赖项(proto3)
在工作空间下打开终端输入:
src/cartographer/scripts/install_proto3.sh
1.2.5 安装cartographer_ros的依赖(安装ros时已经执行过没有问题,所以直接进行下一步骤)
- sudo rosdep init
- rosdep update
- rosdep install
1.2.6 安装absell-cpp library,方法同步骤1.2.4,在终端中输入:
src/cartographer/scripts/install_abseil.sh
1.2.7 编译Cartographer
catkin_make_isolated --install --use-ninja
值得一提的是,在catkin_google_ws工作空间打开终端,刷新环境变量语句是:
source install_isolated/setup.bash
注:安装过程未尽事宜可以参照上面的链接。
2 Cartographer 3D在线建图
2.1 基础介绍
基本使用Cartographer需要对三种文件有一个基本了解,即urdf、.lua、.launch文件,下面对这三种文件展开介绍。
2.1.1 urdf
简单讲一下,Cartographer需要机器人体包括传感器之间的tf坐标树,在其文件目录中有一个单独的urdf文件夹,我们可以在该目录下创建自己的urdf模型。笔者直接在仿真环境中加载了xacro,所以就没有去构建urdf模型,后续在launch文件中对这一部分进行了注释。

2.1.2 .lua文件
笔者理解该文件是一种配置文件,可以对算法参数进行设置。例如我们进行3D建图,需要用到其中的backpack_3d.lua文件,我们就可以复制该文件然后添加到同一目录下,改个名字,例如叫做xxx_3d.lua。

下面是笔者的xxx_3d.lua文件内容:
include "map_builder.lua"
include "trajectory_builder.lua"
options = {
map_builder = MAP_BUILDER,
trajectory_builder = TRAJECTORY_BUILDER,
map_frame = "map",
tracking_frame = "imu",
published_frame = "base_footprint",
odom_frame = "odom",
provide_odom_frame = false,
publish_frame_projected_to_2d = false,
use_odometry = false,
use_nav_sat = false,
use_landmarks = false,
num_laser_scans = 0,
num_multi_echo_laser_scans = 0,
num_subdivisions_per_laser_scan = 1,
num_point_clouds = 1,
lookup_transform_timeout_sec = 0.2,
submap_publish_period_sec = 0.3,
pose_publish_period_sec = 5e-3,
trajectory_publish_period_sec = 30e-3,
rangefinder_sampling_ratio = 1.,
odometry_sampling_ratio = 1.,
fixed_frame_pose_sampling_ratio = 1.,
imu_sampling_ratio = 1.,
landmarks_sampling_ratio = 1.,
}
TRAJECTORY_BUILDER_3D.num_accumulated_range_data = 1
TRAJECTORY_BUILDER_3D.min_range = 0.2
TRAJECTORY_BUILDER_3D.max_range = 150
TRAJECTORY_BUILDER_2D.min_z = 0.1
TRAJECTORY_BUILDER_2D.max_z = 1.0
TRAJECTORY_BUILDER_3D.use_online_correlative_scan_matching = false
MAP_BUILDER.use_trajectory_builder_3d = true
MAP_BUILDER.num_background_threads = 4
POSE_GRAPH.optimization_problem.huber_scale = 5e2
POSE_GRAPH.optimize_every_n_nodes = 320
POSE_GRAPH.constraint_builder.sampling_ratio = 0.03
POSE_GRAPH.optimization_problem.ceres_solver_options.max_num_iterations = 20
POSE_GRAPH.constraint_builder.min_score = 0.5
POSE_GRAPH.constraint_builder.global_localization_min_score = 0.55
POSE_GRAPH.optimization_problem.odometry_translation_weight = 1e3
POSE_GRAPH.optimization_problem.odometry_rotation_weight = 1e3
return options
其中参数设置原理可以参照下面的链接:
https://zhuanlan.zhihu.com/p/563264225https://zhuanlan.zhihu.com/p/563264225
2.1.3 .launch文件
与.lua文件操作相同,我们在这里创建属于自己的launch文件,命名为xxx_3d.launch。
下面是笔者的xxx_3d.launch文件内容:
<launch>
<param name="/use_sim_time" value="true" />
<!-- <param name="robot_description"
textfile="$(find cartographer_ros)/urdf/wangchao_3d.urdf" /> -->
<!-- <node name="robot_state_publisher" pkg="robot_state_publisher"
type="robot_state_publisher" /> -->
<node name="cartographer_node" pkg="cartographer_ros"
type="cartographer_node" args="
-configuration_directory $(find cartographer_ros)/configuration_files
-configuration_basename xxx_3d.lua"
output="screen">
<remap from="points2" to="/velodyne_points" />
<remap from="imu" to="/imu/data" />
<remap from="/odom" to="/odom" />
</node>
<node name="cartographer_occupancy_grid_node" pkg="cartographer_ros"
type="cartographer_occupancy_grid_node" args="-resolution 0.05" />
<node name="rviz" pkg="rviz" type="rviz" required="true"
args="-d $(find cartographer_ros)/configuration_files/demo_3d.rviz" />
</launch>
注:笔者是在仿真环境中进行实验,所以use_sim_time设置为true,并注释了原算法自带的urdf模型代码,点云话题、IMU话题结合自己的实际情况进行修改。此次介绍中.lua和.launch文件仅适用于3D情况。
2.2 Cartographer 3D在线建图
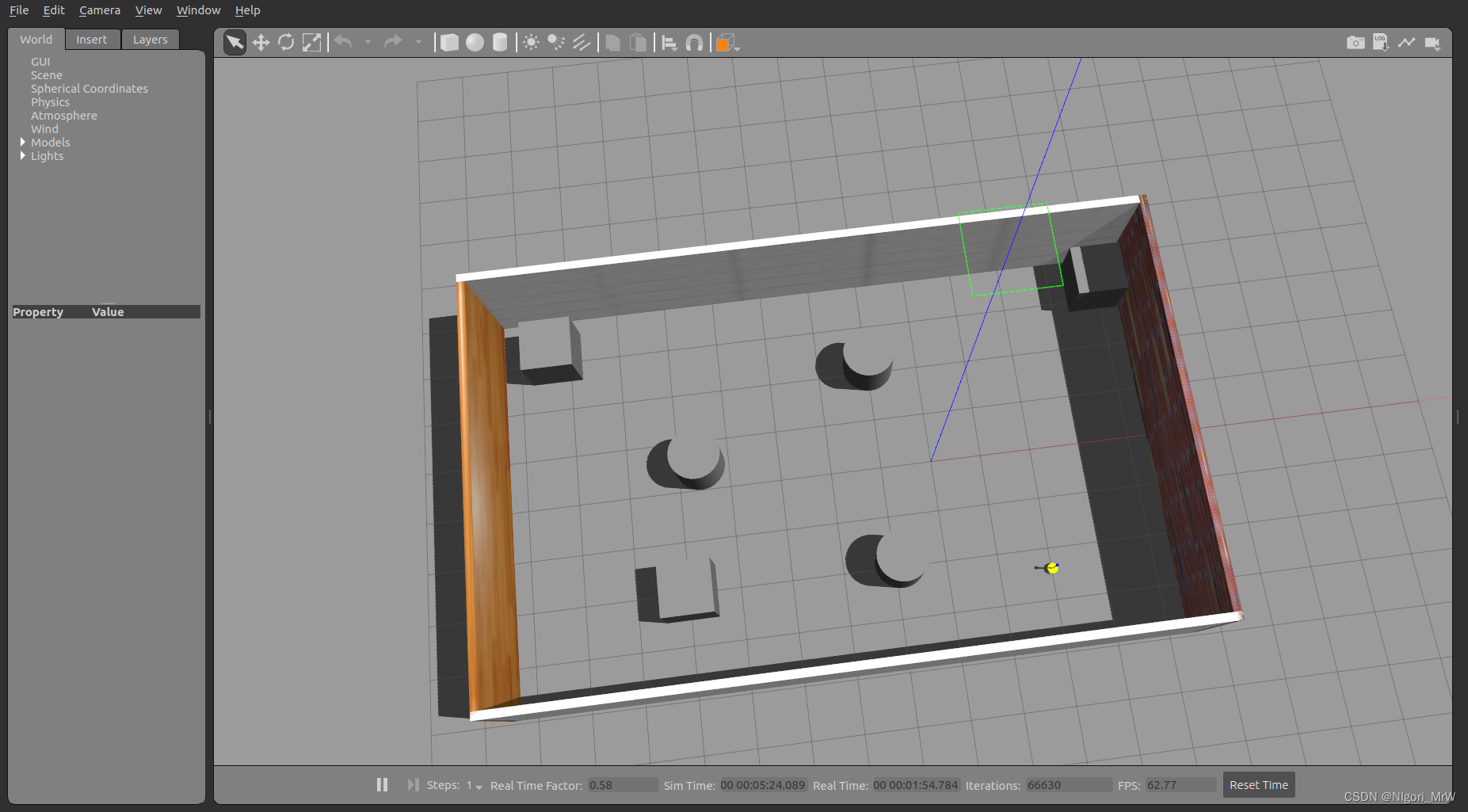
2.2.1 加载仿真实验环境

2.2.2 启动Cartographer在线3D建图
roslaunch cartographer_ros xxx_3d.launch
启动launch文件前,不要忘记刷新一下环境变量。建图结果如图所示:

tf坐标树关系如下:

注:虽然Cartographer实现了在线建图和定位,但是/odom话题发布和Cartographer没有关系。想要查看Cartographer发布的位姿话题需要我们自行发布,笔者这里发布了carto_odom,来查看Cartographer的定位信息,这将在后续的纯定位环节展开介绍。

2.2.3 地图保存
Cartographer创建的地图格式与Gmapping、Hector_slam不同,无法调用map_saver节点保存地图,需要以下命令:
首先需要在Cartographer工作空间下打开终端,刷新一下环境变量:
source install_isolated/setup.bash
然后请求/finish_trajectory服务,完成轨迹,不再接收数据,在终端中输入:
rosservice call /finish_trajectory 0
请求/write_state服务,保存当前状态,其中路径可以根据需要自行更改,在终端中输入:
rosservice call /write_state "{filename: '${HOME}/Downloads/mymap.pbstream'}"
笔者当时参考的链接:
3 Cartographer 3D纯定位
3.1 基础配置
见放一下笔者当时参考的链接:
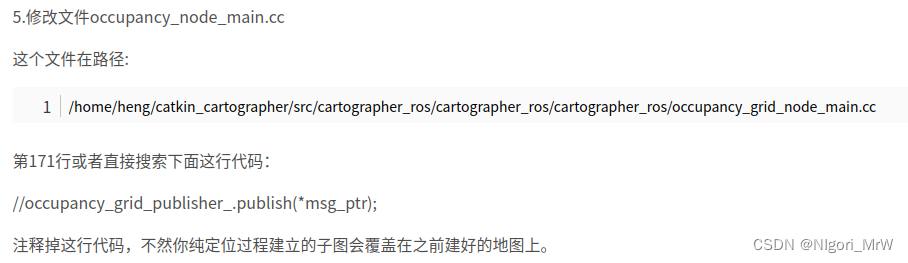
当然保持算法默认参数也是可以的,就只需要参照链接进行如下这步修改,即可使用纯定位:
在这里说一下笔者遇到的特殊情况,因为是仿真环境,笔者的tf树关系如图所示:

刷新后:
 xacro模型是没有问题的,问题应该出现在加载差速运动模型xacro时,左右轮和根节点base_footprint的关系由gazebo进行坐标变换发布。
xacro模型是没有问题的,问题应该出现在加载差速运动模型xacro时,左右轮和根节点base_footprint的关系由gazebo进行坐标变换发布。

出于此原因,笔者将xxx.lua文件中published_frame 改成了 "odom",稳定了算法纯定位的实现,机器人模型不再跳动。
options = {
map_builder = MAP_BUILDER,
trajectory_builder = TRAJECTORY_BUILDER,
map_frame = "map",
tracking_frame = "imu",
published_frame = "odom",
odom_frame = "odom",
provide_odom_frame = false,
publish_frame_projected_to_2d = false,
use_odometry = false,
use_nav_sat = false,
use_landmarks = false,
num_laser_scans = 0,
num_multi_echo_laser_scans = 0,
num_subdivisions_per_laser_scan = 1,
num_point_clouds = 1,
lookup_transform_timeout_sec = 0.2,
submap_publish_period_sec = 0.3,
pose_publish_period_sec = 5e-3,
trajectory_publish_period_sec = 30e-3,
rangefinder_sampling_ratio = 1.,
odometry_sampling_ratio = 1.,
fixed_frame_pose_sampling_ratio = 1.,
imu_sampling_ratio = 1.,
landmarks_sampling_ratio = 1.,
}
3.2 运行及结果
roslaunch cartographer_ros xxx_3d.launch load_state_filename:=/homw/xxx/Downloads/mymap1.pbstream
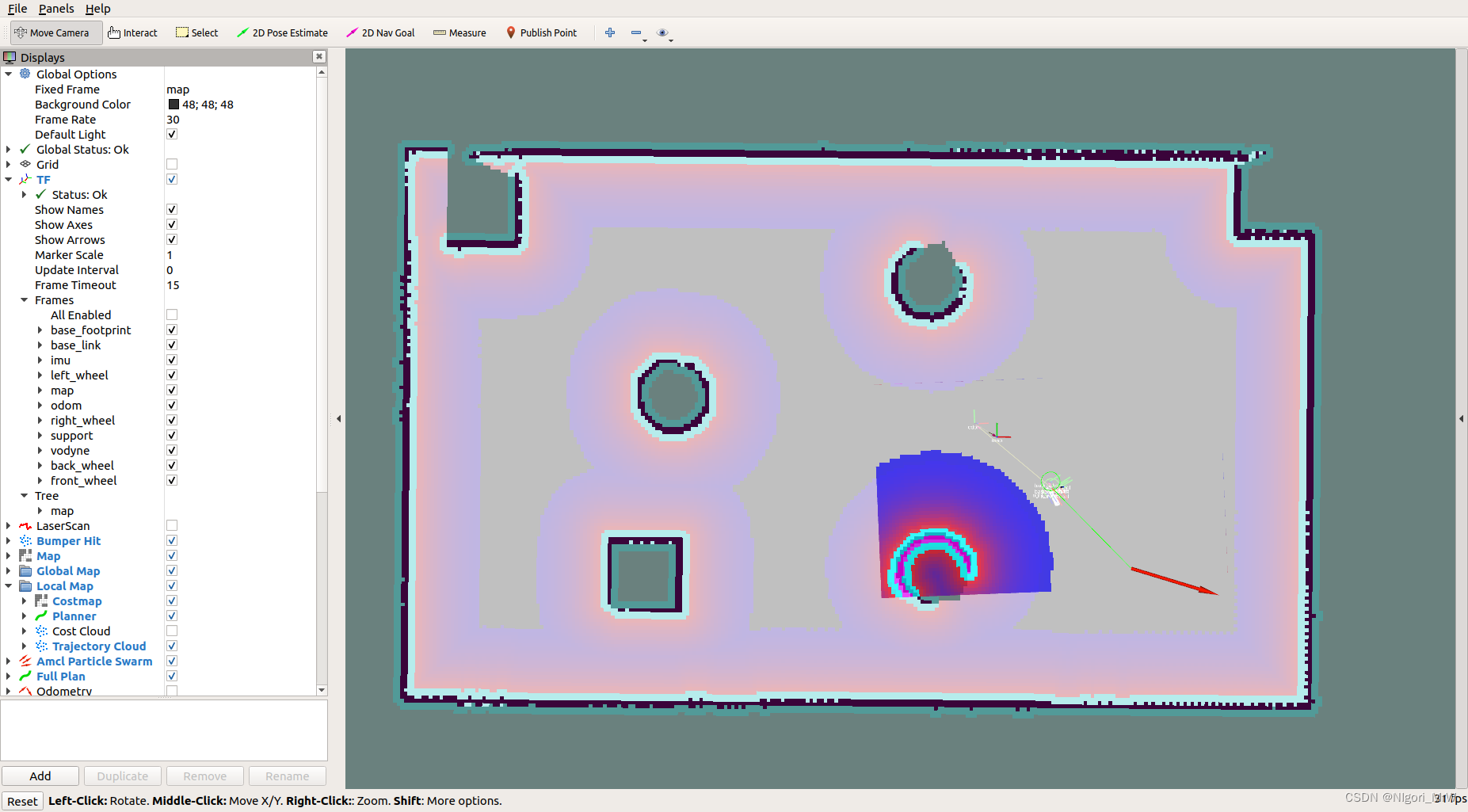
3.2.1 Cartographer纯定位结果

3.2.3 Gazebo中导航场景(到达目标点)
3.3 定位话题发布
写到这其实已经写不动了,但是前面留坑需要填。先放笔者当时参考的链接:
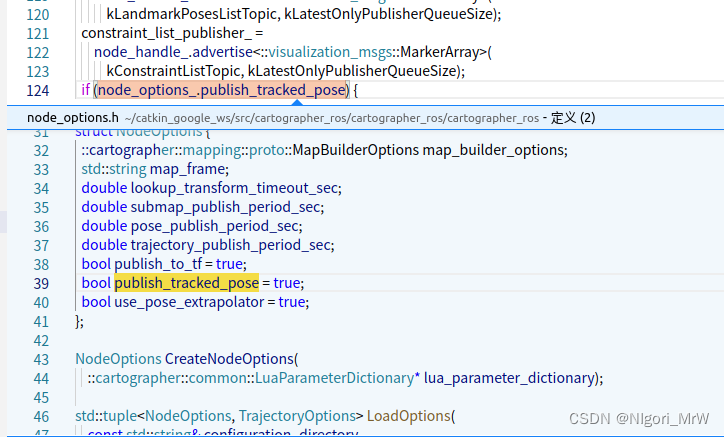
3.3.1 修改publish_tracked_pose为true
首先在VScode里面ctrl+f找到node.cc里面的node_options_.publish_tracked_pose,选中publish_tracked_pose按F12,跳转到定义处,在node_options.h文件下,可以看到publish_tracked_pose默认为false,将其修改为true,这样算法可以发布tracked_pose话题。
3.3.2 修改node.h文件
在node.h中,ctrl+f搜索tracked_pose_publisher_,在其下面添加
::ros::Publisher pub,具体如图所示:

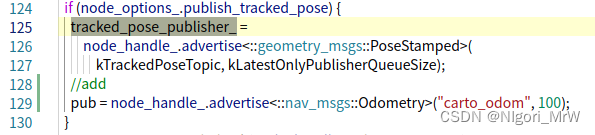
3.3.3 修改node.cc文件
在第一个if (node_options_.publish_tracked_pose) 中加入:
pub = node_handle_.advertise<::nav_msgs::Odometry>("carto_odom", 100);
具体如图所示:
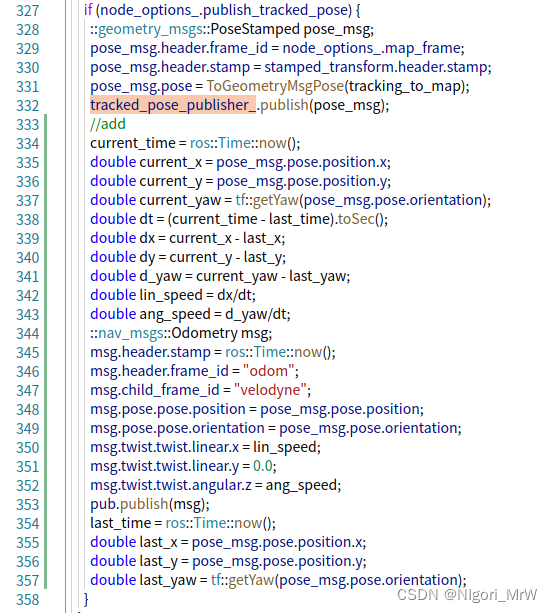
在第二个if (node_options_.publish_tracked_pose) 中加入:
current_time = ros::Time::now();
double current_x = pose_msg.pose.position.x;
double current_y = pose_msg.pose.position.y;
double current_yaw = tf::getYaw(pose_msg.pose.orientation);
double dt = (current_time - last_time).toSec();
double dx = current_x - last_x;
double dy = current_y - last_y;
double d_yaw = current_yaw - last_yaw;
double lin_speed = dx/dt;
double ang_speed = d_yaw/dt;
::nav_msgs::Odometry msg;
msg.header.stamp = ros::Time::now();
msg.header.frame_id = "odom";
msg.child_frame_id = "velodyne";
msg.pose.pose.position = pose_msg.pose.position;
msg.pose.pose.orientation = pose_msg.pose.orientation;
msg.twist.twist.linear.x = lin_speed;
msg.twist.twist.linear.y = 0.0;
msg.twist.twist.angular.z = ang_speed;
pub.publish(msg);
last_time = ros::Time::now();
double last_x = pose_msg.pose.position.x;
double last_y = pose_msg.pose.position.y;
double last_yaw = tf::getYaw(pose_msg.pose.orientation);
具体如图所示:
最后,在node.cc上方补充变量的定义:
如果运行提示tf错误,可以在头文件中添加:
#include "geometry_msgs/PoseWithCovarianceStamped.h"
#include "tf/tf.h"
附上完整的node.cc文件代码:
/*
* Copyright 2016 The Cartographer Authors
*
* Licensed under the Apache License, Version 2.0 (the "License");
* you may not use this file except in compliance with the License.
* You may obtain a copy of the License at
*
* http://www.apache.org/licenses/LICENSE-2.0
*
* Unless required by applicable law or agreed to in writing, software
* distributed under the License is distributed on an "AS IS" BASIS,
* WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
* See the License for the specific language governing permissions and
* limitations under the License.
*/
#include "cartographer_ros/node.h"
#include <chrono>
#include <string>
#include <vector>
#include "Eigen/Core"
#include "absl/memory/memory.h"
#include "absl/strings/str_cat.h"
#include "cartographer/common/configuration_file_resolver.h"
#include "cartographer/common/lua_parameter_dictionary.h"
#include "cartographer/common/port.h"
#include "cartographer/common/time.h"
#include "cartographer/mapping/pose_graph_interface.h"
#include "cartographer/mapping/proto/submap_visualization.pb.h"
#include "cartographer/metrics/register.h"
#include "cartographer/sensor/point_cloud.h"
#include "cartographer/transform/rigid_transform.h"
#include "cartographer/transform/transform.h"
#include "cartographer_ros/metrics/family_factory.h"
#include "cartographer_ros/msg_conversion.h"
#include "cartographer_ros/sensor_bridge.h"
#include "cartographer_ros/tf_bridge.h"
#include "cartographer_ros/time_conversion.h"
#include "cartographer_ros_msgs/StatusCode.h"
#include "cartographer_ros_msgs/StatusResponse.h"
#include "geometry_msgs/PoseStamped.h"
#include "glog/logging.h"
#include "nav_msgs/Odometry.h"
#include "ros/serialization.h"
#include "sensor_msgs/PointCloud2.h"
#include "tf2_eigen/tf2_eigen.h"
#include "visualization_msgs/MarkerArray.h"
//add
ros::Time current_time;
ros::Time last_time;
double last_yaw = 0;
double last_x = 0;
double last_y = 0;
namespace cartographer_ros {
namespace carto = ::cartographer;
using carto::transform::Rigid3d;
using TrajectoryState =
::cartographer::mapping::PoseGraphInterface::TrajectoryState;
namespace {
// Subscribes to the 'topic' for 'trajectory_id' using the 'node_handle' and
// calls 'handler' on the 'node' to handle messages. Returns the subscriber.
template <typename MessageType>
::ros::Subscriber SubscribeWithHandler(
void (Node::*handler)(int, const std::string&,
const typename MessageType::ConstPtr&),
const int trajectory_id, const std::string& topic,
::ros::NodeHandle* const node_handle, Node* const node) {
return node_handle->subscribe<MessageType>(
topic, kInfiniteSubscriberQueueSize,
boost::function<void(const typename MessageType::ConstPtr&)>(
[node, handler, trajectory_id,
topic](const typename MessageType::ConstPtr& msg) {
(node->*handler)(trajectory_id, topic, msg);
}));
}
std::string TrajectoryStateToString(const TrajectoryState trajectory_state) {
switch (trajectory_state) {
case TrajectoryState::ACTIVE:
return "ACTIVE";
case TrajectoryState::FINISHED:
return "FINISHED";
case TrajectoryState::FROZEN:
return "FROZEN";
case TrajectoryState::DELETED:
return "DELETED";
}
return "";
}
} // namespace
Node::Node(
const NodeOptions& node_options,
std::unique_ptr<cartographer::mapping::MapBuilderInterface> map_builder,
tf2_ros::Buffer* const tf_buffer, const bool collect_metrics)
: node_options_(node_options),
map_builder_bridge_(node_options_, std::move(map_builder), tf_buffer) {
absl::MutexLock lock(&mutex_);
if (collect_metrics) {
metrics_registry_ = absl::make_unique<metrics::FamilyFactory>();
carto::metrics::RegisterAllMetrics(metrics_registry_.get());
}
submap_list_publisher_ =
node_handle_.advertise<::cartographer_ros_msgs::SubmapList>(
kSubmapListTopic, kLatestOnlyPublisherQueueSize);
trajectory_node_list_publisher_ =
node_handle_.advertise<::visualization_msgs::MarkerArray>(
kTrajectoryNodeListTopic, kLatestOnlyPublisherQueueSize);
landmark_poses_list_publisher_ =
node_handle_.advertise<::visualization_msgs::MarkerArray>(
kLandmarkPosesListTopic, kLatestOnlyPublisherQueueSize);
constraint_list_publisher_ =
node_handle_.advertise<::visualization_msgs::MarkerArray>(
kConstraintListTopic, kLatestOnlyPublisherQueueSize);
if (node_options_.publish_tracked_pose) {
tracked_pose_publisher_ =
node_handle_.advertise<::geometry_msgs::PoseStamped>(
kTrackedPoseTopic, kLatestOnlyPublisherQueueSize);
//add
pub = node_handle_.advertise<::nav_msgs::Odometry>("carto_odom", 100);
}
service_servers_.push_back(node_handle_.advertiseService(
kSubmapQueryServiceName, &Node::HandleSubmapQuery, this));
service_servers_.push_back(node_handle_.advertiseService(
kTrajectoryQueryServiceName, &Node::HandleTrajectoryQuery, this));
service_servers_.push_back(node_handle_.advertiseService(
kStartTrajectoryServiceName, &Node::HandleStartTrajectory, this));
service_servers_.push_back(node_handle_.advertiseService(
kFinishTrajectoryServiceName, &Node::HandleFinishTrajectory, this));
service_servers_.push_back(node_handle_.advertiseService(
kWriteStateServiceName, &Node::HandleWriteState, this));
service_servers_.push_back(node_handle_.advertiseService(
kGetTrajectoryStatesServiceName, &Node::HandleGetTrajectoryStates, this));
service_servers_.push_back(node_handle_.advertiseService(
kReadMetricsServiceName, &Node::HandleReadMetrics, this));
scan_matched_point_cloud_publisher_ =
node_handle_.advertise<sensor_msgs::PointCloud2>(
kScanMatchedPointCloudTopic, kLatestOnlyPublisherQueueSize);
wall_timers_.push_back(node_handle_.createWallTimer(
::ros::WallDuration(node_options_.submap_publish_period_sec),
&Node::PublishSubmapList, this));
if (node_options_.pose_publish_period_sec > 0) {
publish_local_trajectory_data_timer_ = node_handle_.createTimer(
::ros::Duration(node_options_.pose_publish_period_sec),
&Node::PublishLocalTrajectoryData, this);
}
wall_timers_.push_back(node_handle_.createWallTimer(
::ros::WallDuration(node_options_.trajectory_publish_period_sec),
&Node::PublishTrajectoryNodeList, this));
wall_timers_.push_back(node_handle_.createWallTimer(
::ros::WallDuration(node_options_.trajectory_publish_period_sec),
&Node::PublishLandmarkPosesList, this));
wall_timers_.push_back(node_handle_.createWallTimer(
::ros::WallDuration(kConstraintPublishPeriodSec),
&Node::PublishConstraintList, this));
}
Node::~Node() { FinishAllTrajectories(); }
::ros::NodeHandle* Node::node_handle() { return &node_handle_; }
bool Node::HandleSubmapQuery(
::cartographer_ros_msgs::SubmapQuery::Request& request,
::cartographer_ros_msgs::SubmapQuery::Response& response) {
absl::MutexLock lock(&mutex_);
map_builder_bridge_.HandleSubmapQuery(request, response);
return true;
}
bool Node::HandleTrajectoryQuery(
::cartographer_ros_msgs::TrajectoryQuery::Request& request,
::cartographer_ros_msgs::TrajectoryQuery::Response& response) {
absl::MutexLock lock(&mutex_);
response.status = TrajectoryStateToStatus(
request.trajectory_id,
{TrajectoryState::ACTIVE, TrajectoryState::FINISHED,
TrajectoryState::FROZEN} /* valid states */);
if (response.status.code != cartographer_ros_msgs::StatusCode::OK) {
LOG(ERROR) << "Can't query trajectory from pose graph: "
<< response.status.message;
return true;
}
map_builder_bridge_.HandleTrajectoryQuery(request, response);
return true;
}
void Node::PublishSubmapList(const ::ros::WallTimerEvent& unused_timer_event) {
absl::MutexLock lock(&mutex_);
submap_list_publisher_.publish(map_builder_bridge_.GetSubmapList());
}
void Node::AddExtrapolator(const int trajectory_id,
const TrajectoryOptions& options) {
constexpr double kExtrapolationEstimationTimeSec = 0.001; // 1 ms
CHECK(extrapolators_.count(trajectory_id) == 0);
const double gravity_time_constant =
node_options_.map_builder_options.use_trajectory_builder_3d()
? options.trajectory_builder_options.trajectory_builder_3d_options()
.imu_gravity_time_constant()
: options.trajectory_builder_options.trajectory_builder_2d_options()
.imu_gravity_time_constant();
extrapolators_.emplace(
std::piecewise_construct, std::forward_as_tuple(trajectory_id),
std::forward_as_tuple(
::cartographer::common::FromSeconds(kExtrapolationEstimationTimeSec),
gravity_time_constant));
}
void Node::AddSensorSamplers(const int trajectory_id,
const TrajectoryOptions& options) {
CHECK(sensor_samplers_.count(trajectory_id) == 0);
sensor_samplers_.emplace(
std::piecewise_construct, std::forward_as_tuple(trajectory_id),
std::forward_as_tuple(
options.rangefinder_sampling_ratio, options.odometry_sampling_ratio,
options.fixed_frame_pose_sampling_ratio, options.imu_sampling_ratio,
options.landmarks_sampling_ratio));
}
void Node::PublishLocalTrajectoryData(const ::ros::TimerEvent& timer_event) {
absl::MutexLock lock(&mutex_);
for (const auto& entry : map_builder_bridge_.GetLocalTrajectoryData()) {
const auto& trajectory_data = entry.second;
auto& extrapolator = extrapolators_.at(entry.first);
// We only publish a point cloud if it has changed. It is not needed at high
// frequency, and republishing it would be computationally wasteful.
if (trajectory_data.local_slam_data->time !=
extrapolator.GetLastPoseTime()) {
if (scan_matched_point_cloud_publisher_.getNumSubscribers() > 0) {
// TODO(gaschler): Consider using other message without time
// information.
carto::sensor::TimedPointCloud point_cloud;
point_cloud.reserve(trajectory_data.local_slam_data->range_data_in_local
.returns.size());
for (const cartographer::sensor::RangefinderPoint point :
trajectory_data.local_slam_data->range_data_in_local.returns) {
point_cloud.push_back(cartographer::sensor::ToTimedRangefinderPoint(
point, 0.f /* time */));
}
scan_matched_point_cloud_publisher_.publish(ToPointCloud2Message(
carto::common::ToUniversal(trajectory_data.local_slam_data->time),
node_options_.map_frame,
carto::sensor::TransformTimedPointCloud(
point_cloud, trajectory_data.local_to_map.cast<float>())));
}
extrapolator.AddPose(trajectory_data.local_slam_data->time,
trajectory_data.local_slam_data->local_pose);
}
geometry_msgs::TransformStamped stamped_transform;
// If we do not publish a new point cloud, we still allow time of the
// published poses to advance. If we already know a newer pose, we use its
// time instead. Since tf knows how to interpolate, providing newer
// information is better.
const ::cartographer::common::Time now = std::max(
FromRos(ros::Time::now()), extrapolator.GetLastExtrapolatedTime());
stamped_transform.header.stamp =
node_options_.use_pose_extrapolator
? ToRos(now)
: ToRos(trajectory_data.local_slam_data->time);
// Suppress publishing if we already published a transform at this time.
// Due to 2020-07 changes to geometry2, tf buffer will issue warnings for
// repeated transforms with the same timestamp.
if (last_published_tf_stamps_.count(entry.first) &&
last_published_tf_stamps_[entry.first] == stamped_transform.header.stamp)
continue;
last_published_tf_stamps_[entry.first] = stamped_transform.header.stamp;
const Rigid3d tracking_to_local_3d =
node_options_.use_pose_extrapolator
? extrapolator.ExtrapolatePose(now)
: trajectory_data.local_slam_data->local_pose;
const Rigid3d tracking_to_local = [&] {
if (trajectory_data.trajectory_options.publish_frame_projected_to_2d) {
return carto::transform::Embed3D(
carto::transform::Project2D(tracking_to_local_3d));
}
return tracking_to_local_3d;
}();
const Rigid3d tracking_to_map =
trajectory_data.local_to_map * tracking_to_local;
if (trajectory_data.published_to_tracking != nullptr) {
if (node_options_.publish_to_tf) {
if (trajectory_data.trajectory_options.provide_odom_frame) {
std::vector<geometry_msgs::TransformStamped> stamped_transforms;
stamped_transform.header.frame_id = node_options_.map_frame;
stamped_transform.child_frame_id =
trajectory_data.trajectory_options.odom_frame;
stamped_transform.transform =
ToGeometryMsgTransform(trajectory_data.local_to_map);
stamped_transforms.push_back(stamped_transform);
stamped_transform.header.frame_id =
trajectory_data.trajectory_options.odom_frame;
stamped_transform.child_frame_id =
trajectory_data.trajectory_options.published_frame;
stamped_transform.transform = ToGeometryMsgTransform(
tracking_to_local * (*trajectory_data.published_to_tracking));
stamped_transforms.push_back(stamped_transform);
tf_broadcaster_.sendTransform(stamped_transforms);
} else {
stamped_transform.header.frame_id = node_options_.map_frame;
stamped_transform.child_frame_id =
trajectory_data.trajectory_options.published_frame;
stamped_transform.transform = ToGeometryMsgTransform(
tracking_to_map * (*trajectory_data.published_to_tracking));
tf_broadcaster_.sendTransform(stamped_transform);
}
}
if (node_options_.publish_tracked_pose) {
::geometry_msgs::PoseStamped pose_msg;
pose_msg.header.frame_id = node_options_.map_frame;
pose_msg.header.stamp = stamped_transform.header.stamp;
pose_msg.pose = ToGeometryMsgPose(tracking_to_map);
tracked_pose_publisher_.publish(pose_msg);
//add
current_time = ros::Time::now();
double current_x = pose_msg.pose.position.x;
double current_y = pose_msg.pose.position.y;
double current_yaw = tf::getYaw(pose_msg.pose.orientation);
double dt = (current_time - last_time).toSec();
double dx = current_x - last_x;
double dy = current_y - last_y;
double d_yaw = current_yaw - last_yaw;
double lin_speed = dx/dt;
double ang_speed = d_yaw/dt;
::nav_msgs::Odometry msg;
msg.header.stamp = ros::Time::now();
msg.header.frame_id = "odom";
msg.child_frame_id = "velodyne";
msg.pose.pose.position = pose_msg.pose.position;
msg.pose.pose.orientation = pose_msg.pose.orientation;
msg.twist.twist.linear.x = lin_speed;
msg.twist.twist.linear.y = 0.0;
msg.twist.twist.angular.z = ang_speed;
pub.publish(msg);
last_time = ros::Time::now();
double last_x = pose_msg.pose.position.x;
double last_y = pose_msg.pose.position.y;
double last_yaw = tf::getYaw(pose_msg.pose.orientation);
}
}
}
}
void Node::PublishTrajectoryNodeList(
const ::ros::WallTimerEvent& unused_timer_event) {
if (trajectory_node_list_publisher_.getNumSubscribers() > 0) {
absl::MutexLock lock(&mutex_);
trajectory_node_list_publisher_.publish(
map_builder_bridge_.GetTrajectoryNodeList());
}
}
void Node::PublishLandmarkPosesList(
const ::ros::WallTimerEvent& unused_timer_event) {
if (landmark_poses_list_publisher_.getNumSubscribers() > 0) {
absl::MutexLock lock(&mutex_);
landmark_poses_list_publisher_.publish(
map_builder_bridge_.GetLandmarkPosesList());
}
}
void Node::PublishConstraintList(
const ::ros::WallTimerEvent& unused_timer_event) {
if (constraint_list_publisher_.getNumSubscribers() > 0) {
absl::MutexLock lock(&mutex_);
constraint_list_publisher_.publish(map_builder_bridge_.GetConstraintList());
}
}
std::set<cartographer::mapping::TrajectoryBuilderInterface::SensorId>
Node::ComputeExpectedSensorIds(const TrajectoryOptions& options) const {
using SensorId = cartographer::mapping::TrajectoryBuilderInterface::SensorId;
using SensorType = SensorId::SensorType;
std::set<SensorId> expected_topics;
// Subscribe to all laser scan, multi echo laser scan, and point cloud topics.
for (const std::string& topic :
ComputeRepeatedTopicNames(kLaserScanTopic, options.num_laser_scans)) {
expected_topics.insert(SensorId{SensorType::RANGE, topic});
}
for (const std::string& topic : ComputeRepeatedTopicNames(
kMultiEchoLaserScanTopic, options.num_multi_echo_laser_scans)) {
expected_topics.insert(SensorId{SensorType::RANGE, topic});
}
for (const std::string& topic :
ComputeRepeatedTopicNames(kPointCloud2Topic, options.num_point_clouds)) {
expected_topics.insert(SensorId{SensorType::RANGE, topic});
}
// For 2D SLAM, subscribe to the IMU if we expect it. For 3D SLAM, the IMU is
// required.
if (node_options_.map_builder_options.use_trajectory_builder_3d() ||
(node_options_.map_builder_options.use_trajectory_builder_2d() &&
options.trajectory_builder_options.trajectory_builder_2d_options()
.use_imu_data())) {
expected_topics.insert(SensorId{SensorType::IMU, kImuTopic});
}
// Odometry is optional.
if (options.use_odometry) {
expected_topics.insert(SensorId{SensorType::ODOMETRY, kOdometryTopic});
}
// NavSatFix is optional.
if (options.use_nav_sat) {
expected_topics.insert(
SensorId{SensorType::FIXED_FRAME_POSE, kNavSatFixTopic});
}
// Landmark is optional.
if (options.use_landmarks) {
expected_topics.insert(SensorId{SensorType::LANDMARK, kLandmarkTopic});
}
return expected_topics;
}
int Node::AddTrajectory(const TrajectoryOptions& options) {
const std::set<cartographer::mapping::TrajectoryBuilderInterface::SensorId>
expected_sensor_ids = ComputeExpectedSensorIds(options);
const int trajectory_id =
map_builder_bridge_.AddTrajectory(expected_sensor_ids, options);
AddExtrapolator(trajectory_id, options);
AddSensorSamplers(trajectory_id, options);
LaunchSubscribers(options, trajectory_id);
wall_timers_.push_back(node_handle_.createWallTimer(
::ros::WallDuration(kTopicMismatchCheckDelaySec),
&Node::MaybeWarnAboutTopicMismatch, this, /*oneshot=*/true));
for (const auto& sensor_id : expected_sensor_ids) {
subscribed_topics_.insert(sensor_id.id);
}
return trajectory_id;
}
void Node::LaunchSubscribers(const TrajectoryOptions& options,
const int trajectory_id) {
for (const std::string& topic :
ComputeRepeatedTopicNames(kLaserScanTopic, options.num_laser_scans)) {
subscribers_[trajectory_id].push_back(
{SubscribeWithHandler<sensor_msgs::LaserScan>(
&Node::HandleLaserScanMessage, trajectory_id, topic, &node_handle_,
this),
topic});
}
for (const std::string& topic : ComputeRepeatedTopicNames(
kMultiEchoLaserScanTopic, options.num_multi_echo_laser_scans)) {
subscribers_[trajectory_id].push_back(
{SubscribeWithHandler<sensor_msgs::MultiEchoLaserScan>(
&Node::HandleMultiEchoLaserScanMessage, trajectory_id, topic,
&node_handle_, this),
topic});
}
for (const std::string& topic :
ComputeRepeatedTopicNames(kPointCloud2Topic, options.num_point_clouds)) {
subscribers_[trajectory_id].push_back(
{SubscribeWithHandler<sensor_msgs::PointCloud2>(
&Node::HandlePointCloud2Message, trajectory_id, topic,
&node_handle_, this),
topic});
}
// For 2D SLAM, subscribe to the IMU if we expect it. For 3D SLAM, the IMU is
// required.
if (node_options_.map_builder_options.use_trajectory_builder_3d() ||
(node_options_.map_builder_options.use_trajectory_builder_2d() &&
options.trajectory_builder_options.trajectory_builder_2d_options()
.use_imu_data())) {
subscribers_[trajectory_id].push_back(
{SubscribeWithHandler<sensor_msgs::Imu>(&Node::HandleImuMessage,
trajectory_id, kImuTopic,
&node_handle_, this),
kImuTopic});
}
if (options.use_odometry) {
subscribers_[trajectory_id].push_back(
{SubscribeWithHandler<nav_msgs::Odometry>(&Node::HandleOdometryMessage,
trajectory_id, kOdometryTopic,
&node_handle_, this),
kOdometryTopic});
}
if (options.use_nav_sat) {
subscribers_[trajectory_id].push_back(
{SubscribeWithHandler<sensor_msgs::NavSatFix>(
&Node::HandleNavSatFixMessage, trajectory_id, kNavSatFixTopic,
&node_handle_, this),
kNavSatFixTopic});
}
if (options.use_landmarks) {
subscribers_[trajectory_id].push_back(
{SubscribeWithHandler<cartographer_ros_msgs::LandmarkList>(
&Node::HandleLandmarkMessage, trajectory_id, kLandmarkTopic,
&node_handle_, this),
kLandmarkTopic});
}
}
bool Node::ValidateTrajectoryOptions(const TrajectoryOptions& options) {
if (node_options_.map_builder_options.use_trajectory_builder_2d()) {
return options.trajectory_builder_options
.has_trajectory_builder_2d_options();
}
if (node_options_.map_builder_options.use_trajectory_builder_3d()) {
return options.trajectory_builder_options
.has_trajectory_builder_3d_options();
}
return false;
}
bool Node::ValidateTopicNames(const TrajectoryOptions& options) {
for (const auto& sensor_id : ComputeExpectedSensorIds(options)) {
const std::string& topic = sensor_id.id;
if (subscribed_topics_.count(topic) > 0) {
LOG(ERROR) << "Topic name [" << topic << "] is already used.";
return false;
}
}
return true;
}
cartographer_ros_msgs::StatusResponse Node::TrajectoryStateToStatus(
const int trajectory_id, const std::set<TrajectoryState>& valid_states) {
const auto trajectory_states = map_builder_bridge_.GetTrajectoryStates();
cartographer_ros_msgs::StatusResponse status_response;
const auto it = trajectory_states.find(trajectory_id);
if (it == trajectory_states.end()) {
status_response.message =
absl::StrCat("Trajectory ", trajectory_id, " doesn't exist.");
status_response.code = cartographer_ros_msgs::StatusCode::NOT_FOUND;
return status_response;
}
status_response.message =
absl::StrCat("Trajectory ", trajectory_id, " is in '",
TrajectoryStateToString(it->second), "' state.");
status_response.code =
valid_states.count(it->second)
? cartographer_ros_msgs::StatusCode::OK
: cartographer_ros_msgs::StatusCode::INVALID_ARGUMENT;
return status_response;
}
cartographer_ros_msgs::StatusResponse Node::FinishTrajectoryUnderLock(
const int trajectory_id) {
cartographer_ros_msgs::StatusResponse status_response;
if (trajectories_scheduled_for_finish_.count(trajectory_id)) {
status_response.message = absl::StrCat("Trajectory ", trajectory_id,
" already pending to finish.");
status_response.code = cartographer_ros_msgs::StatusCode::OK;
LOG(INFO) << status_response.message;
return status_response;
}
// First, check if we can actually finish the trajectory.
status_response = TrajectoryStateToStatus(
trajectory_id, {TrajectoryState::ACTIVE} /* valid states */);
if (status_response.code != cartographer_ros_msgs::StatusCode::OK) {
LOG(ERROR) << "Can't finish trajectory: " << status_response.message;
return status_response;
}
// Shutdown the subscribers of this trajectory.
// A valid case with no subscribers is e.g. if we just visualize states.
if (subscribers_.count(trajectory_id)) {
for (auto& entry : subscribers_[trajectory_id]) {
entry.subscriber.shutdown();
subscribed_topics_.erase(entry.topic);
LOG(INFO) << "Shutdown the subscriber of [" << entry.topic << "]";
}
CHECK_EQ(subscribers_.erase(trajectory_id), 1);
}
map_builder_bridge_.FinishTrajectory(trajectory_id);
trajectories_scheduled_for_finish_.emplace(trajectory_id);
status_response.message =
absl::StrCat("Finished trajectory ", trajectory_id, ".");
status_response.code = cartographer_ros_msgs::StatusCode::OK;
return status_response;
}
bool Node::HandleStartTrajectory(
::cartographer_ros_msgs::StartTrajectory::Request& request,
::cartographer_ros_msgs::StartTrajectory::Response& response) {
TrajectoryOptions trajectory_options;
std::tie(std::ignore, trajectory_options) = LoadOptions(
request.configuration_directory, request.configuration_basename);
if (request.use_initial_pose) {
const auto pose = ToRigid3d(request.initial_pose);
if (!pose.IsValid()) {
response.status.message =
"Invalid pose argument. Orientation quaternion must be normalized.";
LOG(ERROR) << response.status.message;
response.status.code =
cartographer_ros_msgs::StatusCode::INVALID_ARGUMENT;
return true;
}
// Check if the requested trajectory for the relative initial pose exists.
response.status = TrajectoryStateToStatus(
request.relative_to_trajectory_id,
{TrajectoryState::ACTIVE, TrajectoryState::FROZEN,
TrajectoryState::FINISHED} /* valid states */);
if (response.status.code != cartographer_ros_msgs::StatusCode::OK) {
LOG(ERROR) << "Can't start a trajectory with initial pose: "
<< response.status.message;
return true;
}
::cartographer::mapping::proto::InitialTrajectoryPose
initial_trajectory_pose;
initial_trajectory_pose.set_to_trajectory_id(
request.relative_to_trajectory_id);
*initial_trajectory_pose.mutable_relative_pose() =
cartographer::transform::ToProto(pose);
initial_trajectory_pose.set_timestamp(cartographer::common::ToUniversal(
::cartographer_ros::FromRos(ros::Time(0))));
*trajectory_options.trajectory_builder_options
.mutable_initial_trajectory_pose() = initial_trajectory_pose;
}
if (!ValidateTrajectoryOptions(trajectory_options)) {
response.status.message = "Invalid trajectory options.";
LOG(ERROR) << response.status.message;
response.status.code = cartographer_ros_msgs::StatusCode::INVALID_ARGUMENT;
} else if (!ValidateTopicNames(trajectory_options)) {
response.status.message = "Topics are already used by another trajectory.";
LOG(ERROR) << response.status.message;
response.status.code = cartographer_ros_msgs::StatusCode::INVALID_ARGUMENT;
} else {
response.status.message = "Success.";
response.trajectory_id = AddTrajectory(trajectory_options);
response.status.code = cartographer_ros_msgs::StatusCode::OK;
}
return true;
}
void Node::StartTrajectoryWithDefaultTopics(const TrajectoryOptions& options) {
absl::MutexLock lock(&mutex_);
CHECK(ValidateTrajectoryOptions(options));
AddTrajectory(options);
}
std::vector<
std::set<cartographer::mapping::TrajectoryBuilderInterface::SensorId>>
Node::ComputeDefaultSensorIdsForMultipleBags(
const std::vector<TrajectoryOptions>& bags_options) const {
using SensorId = cartographer::mapping::TrajectoryBuilderInterface::SensorId;
std::vector<std::set<SensorId>> bags_sensor_ids;
for (size_t i = 0; i < bags_options.size(); ++i) {
std::string prefix;
if (bags_options.size() > 1) {
prefix = "bag_" + std::to_string(i + 1) + "_";
}
std::set<SensorId> unique_sensor_ids;
for (const auto& sensor_id : ComputeExpectedSensorIds(bags_options.at(i))) {
unique_sensor_ids.insert(SensorId{sensor_id.type, prefix + sensor_id.id});
}
bags_sensor_ids.push_back(unique_sensor_ids);
}
return bags_sensor_ids;
}
int Node::AddOfflineTrajectory(
const std::set<cartographer::mapping::TrajectoryBuilderInterface::SensorId>&
expected_sensor_ids,
const TrajectoryOptions& options) {
absl::MutexLock lock(&mutex_);
const int trajectory_id =
map_builder_bridge_.AddTrajectory(expected_sensor_ids, options);
AddExtrapolator(trajectory_id, options);
AddSensorSamplers(trajectory_id, options);
return trajectory_id;
}
bool Node::HandleGetTrajectoryStates(
::cartographer_ros_msgs::GetTrajectoryStates::Request& request,
::cartographer_ros_msgs::GetTrajectoryStates::Response& response) {
using TrajectoryState =
::cartographer::mapping::PoseGraphInterface::TrajectoryState;
absl::MutexLock lock(&mutex_);
response.status.code = ::cartographer_ros_msgs::StatusCode::OK;
response.trajectory_states.header.stamp = ros::Time::now();
for (const auto& entry : map_builder_bridge_.GetTrajectoryStates()) {
response.trajectory_states.trajectory_id.push_back(entry.first);
switch (entry.second) {
case TrajectoryState::ACTIVE:
response.trajectory_states.trajectory_state.push_back(
::cartographer_ros_msgs::TrajectoryStates::ACTIVE);
break;
case TrajectoryState::FINISHED:
response.trajectory_states.trajectory_state.push_back(
::cartographer_ros_msgs::TrajectoryStates::FINISHED);
break;
case TrajectoryState::FROZEN:
response.trajectory_states.trajectory_state.push_back(
::cartographer_ros_msgs::TrajectoryStates::FROZEN);
break;
case TrajectoryState::DELETED:
response.trajectory_states.trajectory_state.push_back(
::cartographer_ros_msgs::TrajectoryStates::DELETED);
break;
}
}
return true;
}
bool Node::HandleFinishTrajectory(
::cartographer_ros_msgs::FinishTrajectory::Request& request,
::cartographer_ros_msgs::FinishTrajectory::Response& response) {
absl::MutexLock lock(&mutex_);
response.status = FinishTrajectoryUnderLock(request.trajectory_id);
return true;
}
bool Node::HandleWriteState(
::cartographer_ros_msgs::WriteState::Request& request,
::cartographer_ros_msgs::WriteState::Response& response) {
absl::MutexLock lock(&mutex_);
if (map_builder_bridge_.SerializeState(request.filename,
request.include_unfinished_submaps)) {
response.status.code = cartographer_ros_msgs::StatusCode::OK;
response.status.message =
absl::StrCat("State written to '", request.filename, "'.");
} else {
response.status.code = cartographer_ros_msgs::StatusCode::INVALID_ARGUMENT;
response.status.message =
absl::StrCat("Failed to write '", request.filename, "'.");
}
return true;
}
bool Node::HandleReadMetrics(
::cartographer_ros_msgs::ReadMetrics::Request& request,
::cartographer_ros_msgs::ReadMetrics::Response& response) {
absl::MutexLock lock(&mutex_);
response.timestamp = ros::Time::now();
if (!metrics_registry_) {
response.status.code = cartographer_ros_msgs::StatusCode::UNAVAILABLE;
response.status.message = "Collection of runtime metrics is not activated.";
return true;
}
metrics_registry_->ReadMetrics(&response);
response.status.code = cartographer_ros_msgs::StatusCode::OK;
response.status.message = "Successfully read metrics.";
return true;
}
void Node::FinishAllTrajectories() {
absl::MutexLock lock(&mutex_);
for (const auto& entry : map_builder_bridge_.GetTrajectoryStates()) {
if (entry.second == TrajectoryState::ACTIVE) {
const int trajectory_id = entry.first;
CHECK_EQ(FinishTrajectoryUnderLock(trajectory_id).code,
cartographer_ros_msgs::StatusCode::OK);
}
}
}
bool Node::FinishTrajectory(const int trajectory_id) {
absl::MutexLock lock(&mutex_);
return FinishTrajectoryUnderLock(trajectory_id).code ==
cartographer_ros_msgs::StatusCode::OK;
}
void Node::RunFinalOptimization() {
{
for (const auto& entry : map_builder_bridge_.GetTrajectoryStates()) {
const int trajectory_id = entry.first;
if (entry.second == TrajectoryState::ACTIVE) {
LOG(WARNING)
<< "Can't run final optimization if there are one or more active "
"trajectories. Trying to finish trajectory with ID "
<< std::to_string(trajectory_id) << " now.";
CHECK(FinishTrajectory(trajectory_id))
<< "Failed to finish trajectory with ID "
<< std::to_string(trajectory_id) << ".";
}
}
}
// Assuming we are not adding new data anymore, the final optimization
// can be performed without holding the mutex.
map_builder_bridge_.RunFinalOptimization();
}
void Node::HandleOdometryMessage(const int trajectory_id,
const std::string& sensor_id,
const nav_msgs::Odometry::ConstPtr& msg) {
absl::MutexLock lock(&mutex_);
if (!sensor_samplers_.at(trajectory_id).odometry_sampler.Pulse()) {
return;
}
auto sensor_bridge_ptr = map_builder_bridge_.sensor_bridge(trajectory_id);
auto odometry_data_ptr = sensor_bridge_ptr->ToOdometryData(msg);
if (odometry_data_ptr != nullptr) {
extrapolators_.at(trajectory_id).AddOdometryData(*odometry_data_ptr);
}
sensor_bridge_ptr->HandleOdometryMessage(sensor_id, msg);
}
void Node::HandleNavSatFixMessage(const int trajectory_id,
const std::string& sensor_id,
const sensor_msgs::NavSatFix::ConstPtr& msg) {
absl::MutexLock lock(&mutex_);
if (!sensor_samplers_.at(trajectory_id).fixed_frame_pose_sampler.Pulse()) {
return;
}
map_builder_bridge_.sensor_bridge(trajectory_id)
->HandleNavSatFixMessage(sensor_id, msg);
}
void Node::HandleLandmarkMessage(
const int trajectory_id, const std::string& sensor_id,
const cartographer_ros_msgs::LandmarkList::ConstPtr& msg) {
absl::MutexLock lock(&mutex_);
if (!sensor_samplers_.at(trajectory_id).landmark_sampler.Pulse()) {
return;
}
map_builder_bridge_.sensor_bridge(trajectory_id)
->HandleLandmarkMessage(sensor_id, msg);
}
void Node::HandleImuMessage(const int trajectory_id,
const std::string& sensor_id,
const sensor_msgs::Imu::ConstPtr& msg) {
absl::MutexLock lock(&mutex_);
if (!sensor_samplers_.at(trajectory_id).imu_sampler.Pulse()) {
return;
}
auto sensor_bridge_ptr = map_builder_bridge_.sensor_bridge(trajectory_id);
auto imu_data_ptr = sensor_bridge_ptr->ToImuData(msg);
if (imu_data_ptr != nullptr) {
extrapolators_.at(trajectory_id).AddImuData(*imu_data_ptr);
}
sensor_bridge_ptr->HandleImuMessage(sensor_id, msg);
}
void Node::HandleLaserScanMessage(const int trajectory_id,
const std::string& sensor_id,
const sensor_msgs::LaserScan::ConstPtr& msg) {
absl::MutexLock lock(&mutex_);
if (!sensor_samplers_.at(trajectory_id).rangefinder_sampler.Pulse()) {
return;
}
map_builder_bridge_.sensor_bridge(trajectory_id)
->HandleLaserScanMessage(sensor_id, msg);
}
void Node::HandleMultiEchoLaserScanMessage(
const int trajectory_id, const std::string& sensor_id,
const sensor_msgs::MultiEchoLaserScan::ConstPtr& msg) {
absl::MutexLock lock(&mutex_);
if (!sensor_samplers_.at(trajectory_id).rangefinder_sampler.Pulse()) {
return;
}
map_builder_bridge_.sensor_bridge(trajectory_id)
->HandleMultiEchoLaserScanMessage(sensor_id, msg);
}
void Node::HandlePointCloud2Message(
const int trajectory_id, const std::string& sensor_id,
const sensor_msgs::PointCloud2::ConstPtr& msg) {
absl::MutexLock lock(&mutex_);
if (!sensor_samplers_.at(trajectory_id).rangefinder_sampler.Pulse()) {
return;
}
map_builder_bridge_.sensor_bridge(trajectory_id)
->HandlePointCloud2Message(sensor_id, msg);
}
void Node::SerializeState(const std::string& filename,
const bool include_unfinished_submaps) {
absl::MutexLock lock(&mutex_);
CHECK(
map_builder_bridge_.SerializeState(filename, include_unfinished_submaps))
<< "Could not write state.";
}
void Node::LoadState(const std::string& state_filename,
const bool load_frozen_state) {
absl::MutexLock lock(&mutex_);
map_builder_bridge_.LoadState(state_filename, load_frozen_state);
}
void Node::MaybeWarnAboutTopicMismatch(
const ::ros::WallTimerEvent& unused_timer_event) {
::ros::master::V_TopicInfo ros_topics;
::ros::master::getTopics(ros_topics);
std::set<std::string> published_topics;
std::stringstream published_topics_string;
for (const auto& it : ros_topics) {
std::string resolved_topic = node_handle_.resolveName(it.name, false);
published_topics.insert(resolved_topic);
published_topics_string << resolved_topic << ",";
}
bool print_topics = false;
for (const auto& entry : subscribers_) {
int trajectory_id = entry.first;
for (const auto& subscriber : entry.second) {
std::string resolved_topic = node_handle_.resolveName(subscriber.topic);
if (published_topics.count(resolved_topic) == 0) {
LOG(WARNING) << "Expected topic \"" << subscriber.topic
<< "\" (trajectory " << trajectory_id << ")"
<< " (resolved topic \"" << resolved_topic << "\")"
<< " but no publisher is currently active.";
print_topics = true;
}
}
}
if (print_topics) {
LOG(WARNING) << "Currently available topics are: "
<< published_topics_string.str();
}
}
} // namespace cartographer_ros
到此就完成了carto_odom的发布,该话题包含了Cartographer的定位信息。
版权归原作者 NIgori_MrW 所有, 如有侵权,请联系我们删除。