
🔎大家好,我是Sonhhxg_柒,希望你看完之后,能对你有所帮助,不足请指正!共同学习交流🔎
📝个人主页-Sonhhxg_柒的博客_CSDN博客 📃
🎁欢迎各位→点赞👍 + 收藏⭐️ + 留言📝
📣系列专栏 - 机器学习【ML】 自然语言处理【NLP】 深度学习【DL】
🖍foreword
✔说明⇢本人讲解主要包括Python、机器学习(ML)、深度学习(DL)、自然语言处理(NLP)等内容。
如果你对这个系列感兴趣的话,可以关注订阅哟👋
生成对抗网络 GAN 的基本原理
说到GAN第一篇要看的paper当然是Ian Goodfellow大牛的Generative Adversarial Networks(arxiv:https://arxiv.org/abs/1406.2661),这篇paper算是这个领域的开山之作。
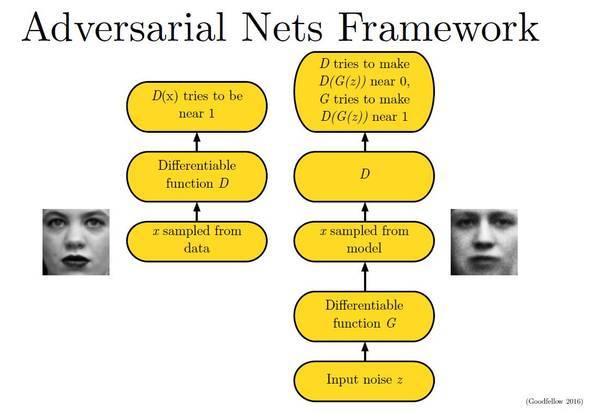
GAN的基本原理其实非常简单,这里以生成图片为例进行说明。假设我们有两个网络,G(Generator)和D(Discriminator)。正如它的名字所暗示的那样,它们的功能分别是:
- G是一个生成图片的网络,它接收一个随机的噪声z,通过这个噪声生成图片,记做G(z)。
- D是一个判别网络,判别一张图片是不是“真实的”。它的输入参数是x,x代表一张图片,输出D(x)代表x为真实图片的概率,如果为1,就代表100%是真实的图片,而输出为0,就代表不可能是真实的图片。
在训练过程中,生成网络G的目标就是尽量生成真实的图片去欺骗判别网络D。而D的目标就是尽量把G生成的图片和真实的图片分别开来。这样,G和D构成了一个动态的“博弈过程”。
最后博弈的结果是什么?在最理想的状态下,G可以生成足以“以假乱真”的图片G(z)。对于D来说,它难以判定G生成的图片究竟是不是真实的,因此D(G(z)) = 0.5。
这样我们的目的就达成了:我们得到了一个生成式的模型G,它可以用来生成图片。
以上只是大致说了一下GAN的核心原理,如何用数学语言描述呢?这里直接摘录论文里的公式:

简单分析一下这个公式:
- 整个式子由两项构成。x表示真实图片,z表示输入G网络的噪声,而G(z)表示G网络生成的图片。
- D(x)表示D网络判断真实图片是否真实的概率(因为x就是真实的,所以对于D来说,这个值越接近1越好)。而D(G(z))是D网络判断G生成的图片的是否真实的概率。
- G的目的:上面提到过,D(G(z))是D网络判断G生成的图片是否真实的概率,G应该希望自己生成的图片“越接近真实越好”。也就是说,G希望D(G(z))尽可能得大,这时V(D, G)会变小。因此我们看到式子的最前面的记号是min_G。
- D的目的:D的能力越强,D(x)应该越大,D(G(x))应该越小。这时V(D,G)会变大。因此式子对于D来说是求最大(max_D)
下面这幅图片很好地描述了这个过程:
那么如何用随机梯度下降法训练D和G?论文中也给出了算法:
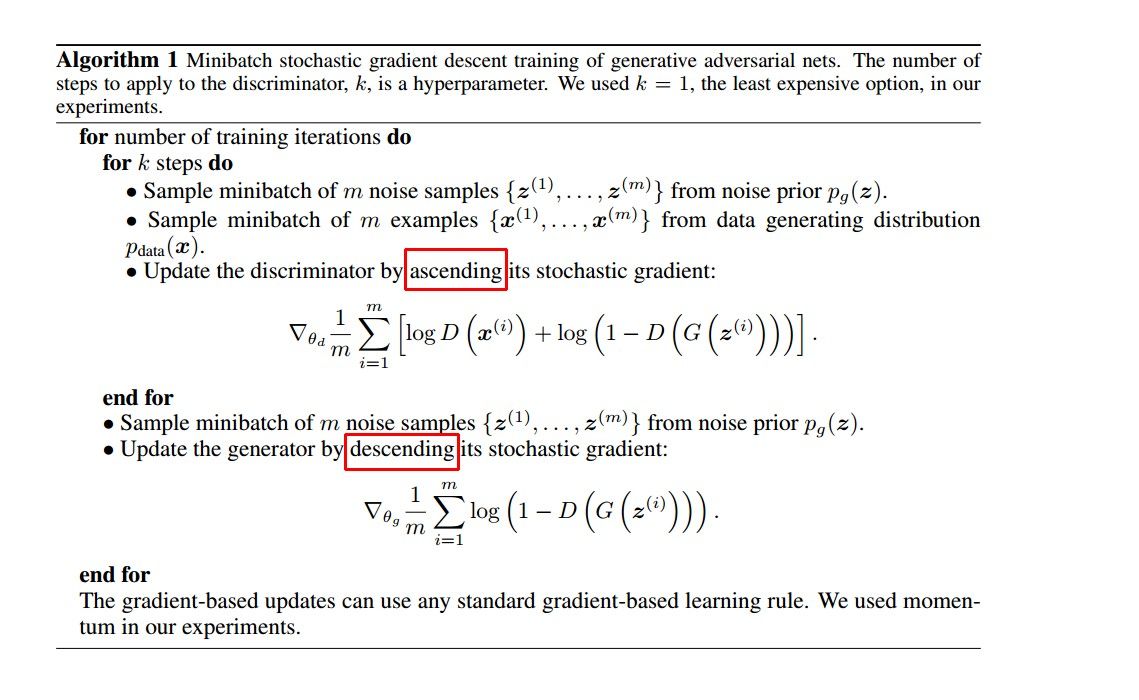
这里红框圈出的部分是我们要额外注意的。第一步我们训练D,D是希望V(G, D)越大越好,所以是加上梯度(ascending)。第二步训练G时,V(G, D)越小越好,所以是减去梯度(descending)。整个训练过程交替进行。
生成对抗网络Pytorch的实现
import os
import torch
import torchvision
import torch.nn as nn
from torchvision import transforms
from torchvision.utils import save_image
# 设备配置
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
# 超参数
latent_size = 64
hidden_size = 256
image_size = 784
num_epochs = 200
batch_size = 100
sample_dir = 'samples'
# 如果不存在则创建目录
if not os.path.exists(sample_dir):
os.makedirs(sample_dir)
# 图像处理
# transform = transforms.Compose([
# transforms.ToTensor(),
# transforms.Normalize(mean=(0.5, 0.5, 0.5), # 3 for RGB channels
# std=(0.5, 0.5, 0.5))])
transform = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize(mean=[0.5], # 1 for greyscale channels
std=[0.5])])
# MNIST 数据集
mnist = torchvision.datasets.MNIST(root='../../data/',
train=True,
transform=transform,
download=True)
# 数据加载器
data_loader = torch.utils.data.DataLoader(dataset=mnist,
batch_size=batch_size,
shuffle=True)
# 鉴别器
D = nn.Sequential(
nn.Linear(image_size, hidden_size),
nn.LeakyReLU(0.2),
nn.Linear(hidden_size, hidden_size),
nn.LeakyReLU(0.2),
nn.Linear(hidden_size, 1),
nn.Sigmoid())
# 生成器
G = nn.Sequential(
nn.Linear(latent_size, hidden_size),
nn.ReLU(),
nn.Linear(hidden_size, hidden_size),
nn.ReLU(),
nn.Linear(hidden_size, image_size),
nn.Tanh())
# 设备设置
D = D.to(device)
G = G.to(device)
# 二元交叉熵损失和优化器
criterion = nn.BCELoss()
d_optimizer = torch.optim.Adam(D.parameters(), lr=0.0002)
g_optimizer = torch.optim.Adam(G.parameters(), lr=0.0002)
def denorm(x):
out = (x + 1) / 2
return out.clamp(0, 1)
def reset_grad():
d_optimizer.zero_grad()
g_optimizer.zero_grad()
# 开始训练
total_step = len(data_loader)
for epoch in range(num_epochs):
for i, (images, _) in enumerate(data_loader):
images = images.reshape(batch_size, -1).to(device)
# 创建稍后用作 BCE 损失输入的标签
real_labels = torch.ones(batch_size, 1).to(device)
fake_labels = torch.zeros(batch_size, 1).to(device)
# ================================================================== #
# 训练判别器 #
# ================================================================== #
# 使用真实图像计算 BCE_Loss 其中 BCE_Loss(x, y): - y * log(D(x)) - (1-y) * log(1 - D(x))
# 损失的第二项总是为零,因为 real_labels == 1
outputs = D(images)
d_loss_real = criterion(outputs, real_labels)
real_score = outputs
# 使用假图像计算 BCELoss
# 损失的第一项总是为零,因为 fake_labels == 0
z = torch.randn(batch_size, latent_size).to(device)
fake_images = G(z)
outputs = D(fake_images)
d_loss_fake = criterion(outputs, fake_labels)
fake_score = outputs
# 反向传播和优化
d_loss = d_loss_real + d_loss_fake
reset_grad()
d_loss.backward()
d_optimizer.step()
# ================================================================== #
# 训练生成器 #
# ================================================================== #
# 用假图像计算损失
z = torch.randn(batch_size, latent_size).to(device)
fake_images = G(z)
outputs = D(fake_images)
# 我们训练 G 最大化 log(D(G(z)) 而不是最小化 log(1-D(G(z)))
# 原因见第3节最后一段。 https://arxiv.org/pdf/1406.2661.pdf
g_loss = criterion(outputs, real_labels)
# 反向传播和优化
reset_grad()
g_loss.backward()
g_optimizer.step()
if (i+1) % 200 == 0:
print('Epoch [{}/{}], Step [{}/{}], d_loss: {:.4f}, g_loss: {:.4f}, D(x): {:.2f}, D(G(z)): {:.2f}'
.format(epoch, num_epochs, i+1, total_step, d_loss.item(), g_loss.item(),
real_score.mean().item(), fake_score.mean().item()))
# 保存真实图片
if (epoch+1) == 1:
images = images.reshape(images.size(0), 1, 28, 28)
save_image(denorm(images), os.path.join(sample_dir, 'real_images.png'))
# 保存采样图像
fake_images = fake_images.reshape(fake_images.size(0), 1, 28, 28)
save_image(denorm(fake_images), os.path.join(sample_dir, 'fake_images-{}.png'.format(epoch+1)))
# 保存模型checkpoints
torch.save(G.state_dict(), 'G.ckpt')
torch.save(D.state_dict(), 'D.ckpt')
版权归原作者 Sonhhxg_柒 所有, 如有侵权,请联系我们删除。