
ROS (Robot Operating System)起源于2007年斯坦福大学人工智能实验室与WillowGarage公司的个人机器人项目,其后被Willow Garage公司开源和发展,目前由OSRF(Open Source Robotics Foundation, Inc)公司维护。它是一个开源的面向机器人软件开发的灵活框架,是一系列开发工具和开发库的集合体,同时,作为一种类似于传统操作系统的元操作系统(Meta-Operating System)还提供了硬件抽象、设备驱动、信息传递等诸多功能。
目录
ROS安装
官方wiki教程链接:
http://wiki.ros.org/melodic/Installation/Ubuntu
首先请自行完成Ubuntu系统的安装,本文使用Ubuntu18.04版本。
(2022.9.28更新内容)
因为网络以及源的问题,原始的ROS的安装方法可能会遇到许多问题,推荐使用集成好的ROS安装包,例如鱼香ROSwget http://fishros.com/install -O fishros && . fishros运行上述命令,按照提示完成安装,可直接跳到(7)安装检查
(1)设置软件源
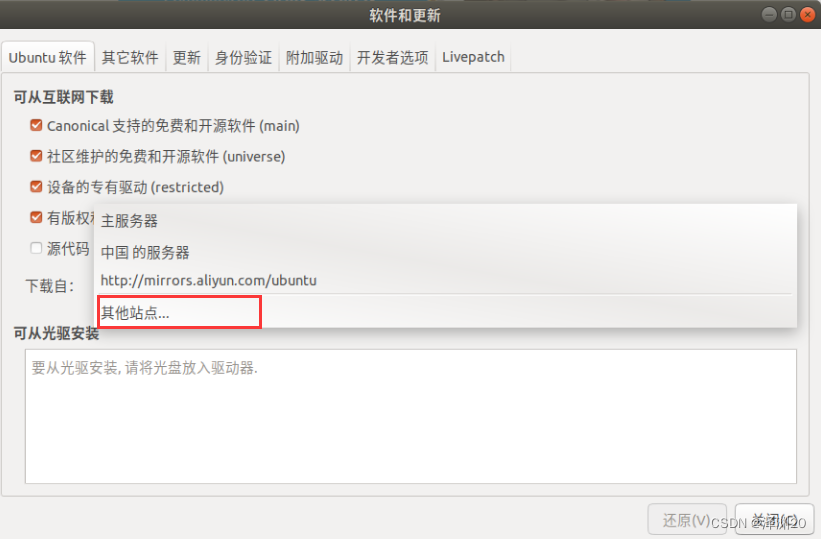
打开Ubuntu软件,右键上方的“Ubuntu软件”,选择“软件和更新”
点击图示小三角,选择其他站点,并选择合适的国内源。
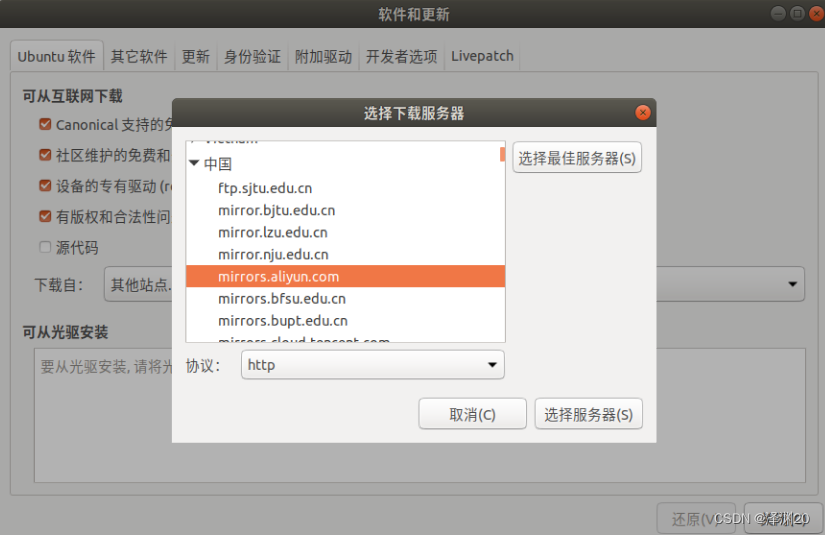
点击选择服务器后,关闭软件与更新,注意检查是否勾选可从互联网下载中的前四项,可能会影响后续安装。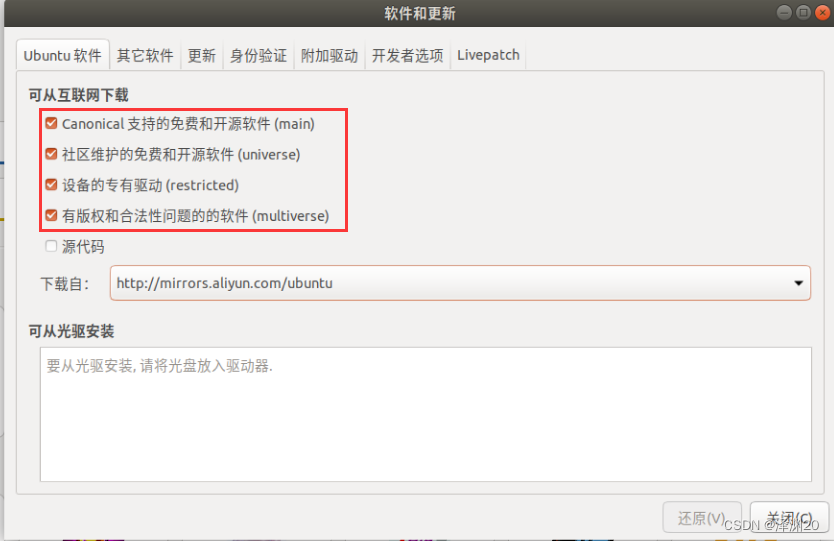
此外,安装ROS时软件源的修改还可以使用如下命令:
sudosh-c'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
考虑到国内的网络连接问题,你还可以考虑使用诸如中国科学技术大学或其他的镜像:
sudosh-c'. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
(2)设置密钥
sudo apt-key adv --keyserver'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
(3)安装ROS文件
首先确认你的安装包索引是最新的
sudoapt update
执行以下命令安装ROS
sudoaptinstall ros-melodic-desktop-full
注意,该命令适用于Ubuntu18.04,不同的Ubuntu版本所需命令有细微差别。
(4)初始化rosdep
sudo rosdep init
执行后出现下列提示,执行update
rosdep update

顺利执行的结果如图所示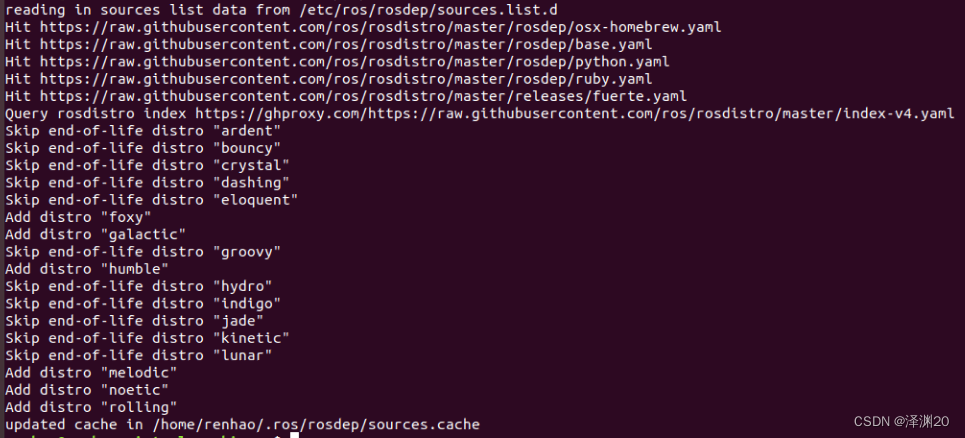
如果提示找不到rosdep,请先安装rospack-tools
sudoaptinstall rospack-tools
如果依然报错,打开host文件并在文件末尾添加:151.101.84.133 raw.githubusercontent.com
sudo gedit /etc/hosts

如果执行rosdep update时出现如下错误,基本是网络问题,请调整你的网络环境,包括但不限于:使用其他wifi或手机热点,开启或关闭vpn等。如果修改网络仍然无法解决,请参考这里使用代理的方式解决,亲测有效。
reading in sources list data from /etc/ros/rosdep/sources.list.d
ERROR: error loading sources list:
(‘The read operation timed out’,)
如果因为重复执行两条命令,导致出现问题1.20-default.list存在,参考链接ubuntu安装ROS 遇到问题
(5)设置环境变量
echo"source /opt/ros/melodic/setup.bash">> ~/.bashrc
source ~/.bashrc
执行上述命令后,可以输入ros并按tab键,正常情况下会输出ros开头的对应命令,如果环境变量设置有问题,将不会出现。
(6)安装rosinstall
sudoaptinstall python-rosinstall python-rosinstall-generator python-wstool build-essential
(7)安装检查
ROS的默认安装路径为/opt/ros,可使用文件系统查看是否存在。
使用基本命令检查ROS是否安装成功。以下三条命令分别打开一个终端进行运行。
roscore #启动roscore
rosrun turtlesim turtlesim_node #启动小海龟仿真器
rosrun turtlesim turtle_teleop_key #启动海龟控制节点
启动roscore的正常输出日志样例: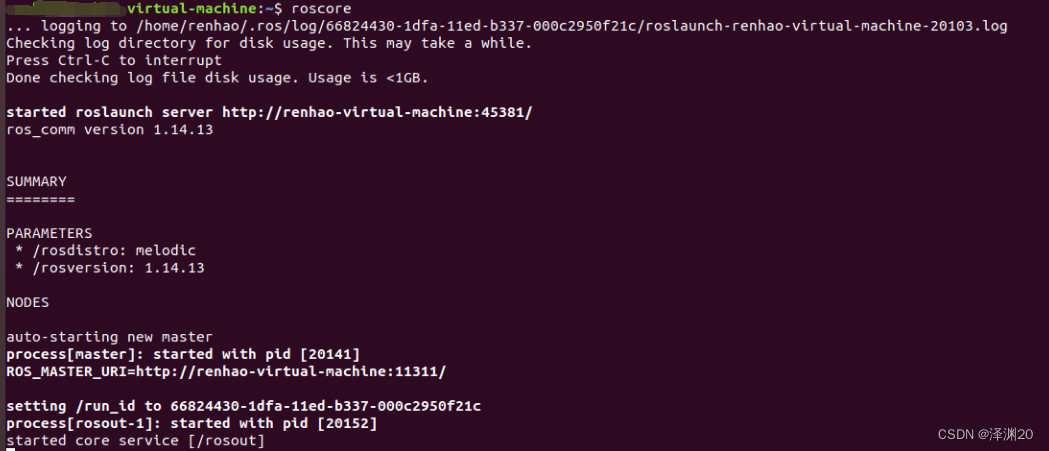
启动小海龟仿真器的界面: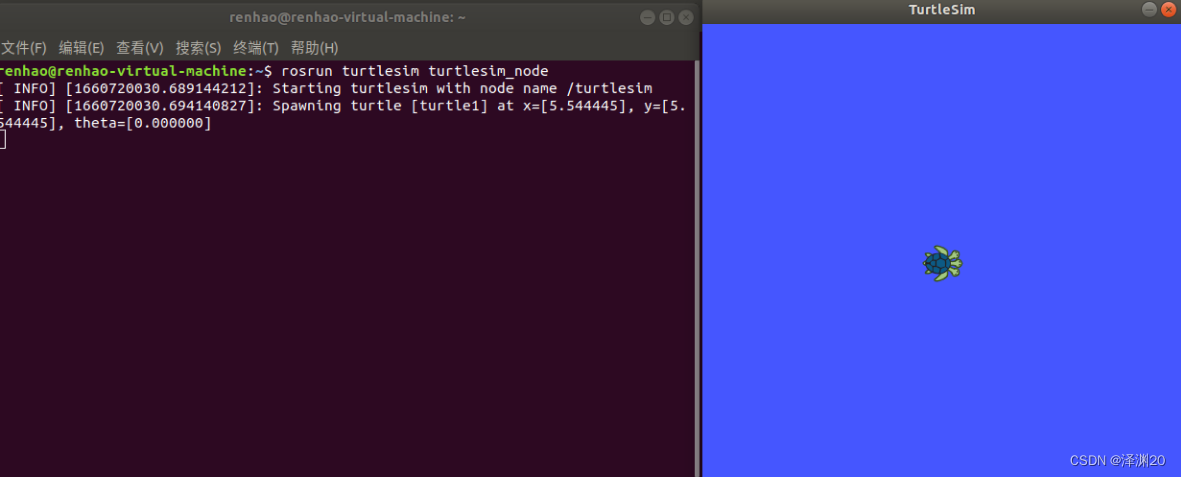
启动海龟控制节点的界面:
此时总共打开了三个终端,在海龟控制节点终端界面使用方向键即可控制仿真器中的海龟进行移动。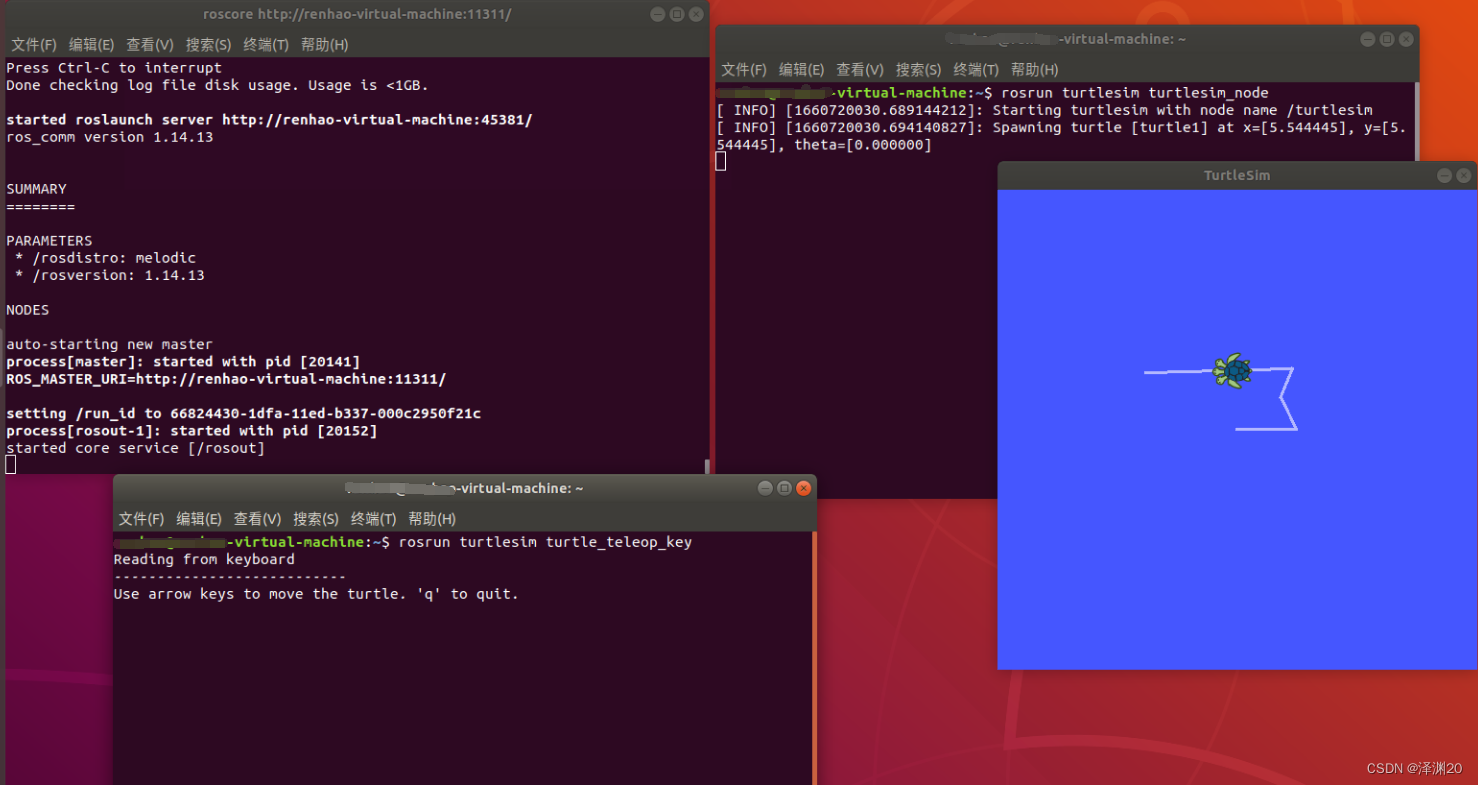
参考链接
[1]【古月居】古月·ROS入门21讲 | 一学就会的ROS机器人入门教程第五讲:安装ROS系统
[2]ROS官方安装教程
[3]解决ROS系统 rosdep update超时问题的新方法
[4]sudo rosdep init步骤遇到问题
版权归原作者 泽渊20 所有, 如有侵权,请联系我们删除。