
论文:YOLOX: Exceeding YOLO Series in 2021
论文链接:https://arxiv.org/pdf/2107.08430.pdf
代码链接:https://github.com/Megvii-BaseDetection/YOLOX.
文章目录
1 为什么提出YOLOX
目标检测分为Anchor Based和Anchor Free两种方式。
在Yolov3、Yolov4、Yolov5中,通常都是采用 Anchor Based的方式,来提取目标框。
Yolox 将 Anchor free 的方式引入到Yolo系列中,使用anchor free方法有如下好处:
(1) 降低了计算量,不涉及IoU计算,另外产生的预测框数量也更少。
假设 feature map的尺度为
80
×
80
80\times80
80×80,anchor based 方法在Feature Map上,每个单元格一般设置三个不同尺寸大小的锚框,因此产生
3
×
80
×
80
=
19200
3\times 80\times 80=19200
3×80×80=19200 个预测框。而使用anchor free的方法,则仅产生
80
×
80
=
6400
80\times 80=6400
80×80=6400 个预测框,降低了计算量。
(2) 缓解了正负样本不平衡问题
anchor free方法的预测框只有anchor based方法的1/3,而预测框中大部分是负样本,因此anchor free方法可以减少负样本数,进一步缓解了正负样本不平衡问题。
(3) 避免了anchor的调参
anchor based方法的anchor box的尺度是一个超参数,不同的超参设置会影响模型性能,anchor free方法避免了这一点。
2 YOLOX 网络架构
YOLOX是在YOLOV3基础上做的改进,主体网络框架如下: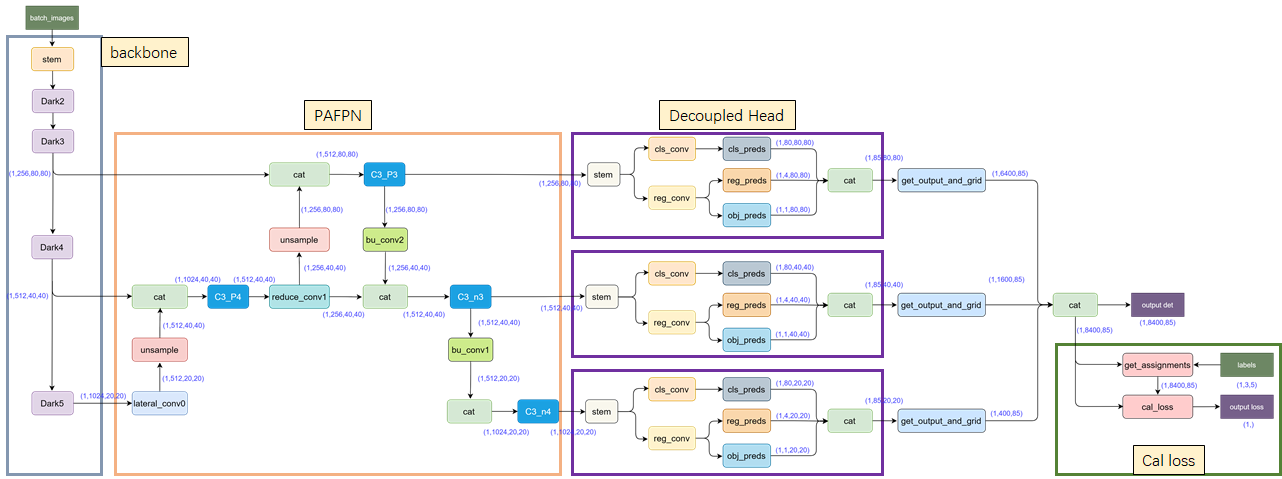
- 输入端 :表示输入的图片,采用的数据增强方式:
RandomHorizontalFlip、ColorJitter、多尺度增强 - BackBone :用来提取图片特征,采用
Darknet53。 - Neck:用于特征融合,采用
PAFPN。 - Head: 用来结果预测,主要亮点是采用
Decoupled Head、Anchor-free、Multi positives
3 YOLOX 实施细节
3.1 backbone
self.backbone = CSPDarknet(depth, width, depthwise=depthwise, act=act)
实例化backbone,采用的是 darknet53。
darknet53具体结构参考下面的图片,左侧是 darknet-53 结构图,右侧是对左侧中的 “convolutional” 层 和 “residual” 层的细节展示。
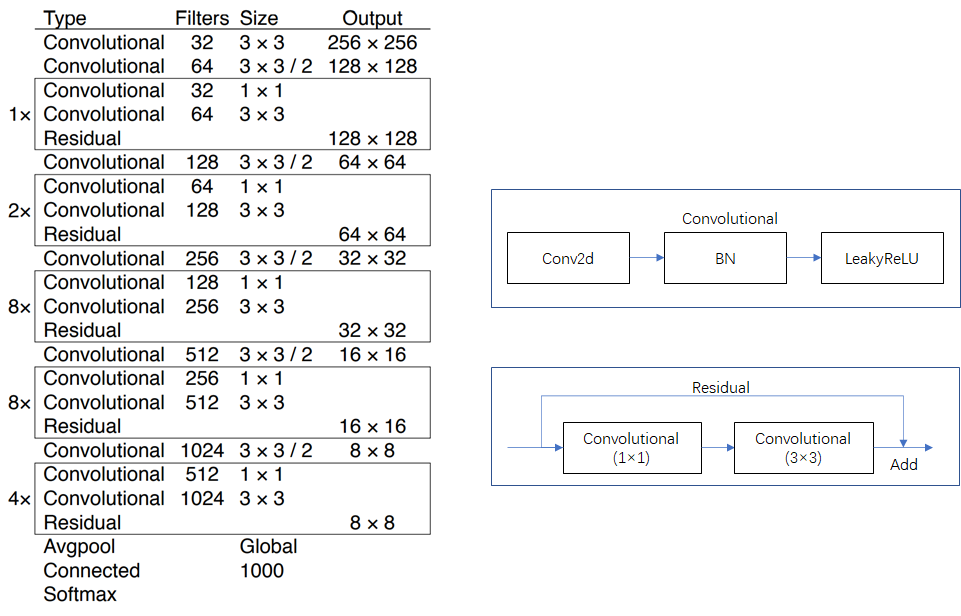
为什么使用 darknet-53 backbone?
darknet-53 的性能接近 ResNet-152,但是 FPS 要高一倍。

out_features = self.backbone(input)
backbone的输入input为一个batch的图片 (B,C,H,W),其中B为batchsize,C为图片的channel数,如果是RGB图片,则C=3,H,W分别是图片的高宽。
假设batchsize为1,宽高分别为640,640,则 demo input可以表示为: torch.randn((1,3,640,640))。
out_features的输出为3个特征层(分别为’dark3’,‘dark4’,‘dark5’)组成的字典,各特征层的shape如下:
{'dark3':(1,256,80,80),
'dark4':(1,512,40,40),
'dark5':(1,1024,20,20)}
3.2 neck
features =[out_features[f]for f in self.in_features][x2, x1, x0]= features
# x0:(1,1024,20,20)# x1:(1,512,40,40)# x2:(1,256,80,80)
fpn_out0 = self.lateral_conv0(x0)# (1,512,20,20)
f_out0 = self.upsample(fpn_out0)# (1,512,40,40)
f_out0 = torch.cat([f_out0, x1],1)# (1,1024,40,40)
f_out0 = self.C3_p4(f_out0)# (1,512,40,40)
fpn_out1 = self.reduce_conv1(f_out0)# (1,256,40,40)
f_out1 = self.upsample(fpn_out1)# (1,256,80,80)
f_out1 = torch.cat([f_out1, x2],1)# (1,512,80,80)
pan_out2 = self.C3_p3(f_out1)# (1,256,80,80)
p_out1 = self.bu_conv2(pan_out2)# (1,256,40,40)
p_out1 = torch.cat([p_out1, fpn_out1],1)# (1,512,40,40)
pan_out1 = self.C3_n3(p_out1)# (1,512,40,40)
p_out0 = self.bu_conv1(pan_out1)# (1,512,20,20)
p_out0 = torch.cat([p_out0, fpn_out0],1)# (1,1024,20,20)
pan_out0 = self.C3_n4(p_out0)# (1,1024,20,20)
outputs =(pan_out2, pan_out1, pan_out0)
在Neck结构中,Yolox采用PAFPN的结构进行融合。如下图所示,将高层的特征信息,先通过上采样的方式进行传递融合,再通过下采样融合方式得到预测的特征图,最终输出3个特征层组成的元组结果,各特征层的shape如下:
((1,256,80,80),(1,512,40,40),(1,1024,20,20))
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-2dEj8WvJ-1649596892593)(C:\Users\Sunny\AppData\Roaming\Typora\typora-user-images\image-20220410181246195.png)]](https://img-blog.csdnimg.cn/1a6ab5465f3f46a59dc6d04a37479dfe.png?x-oss-process=image)
3.3 Head
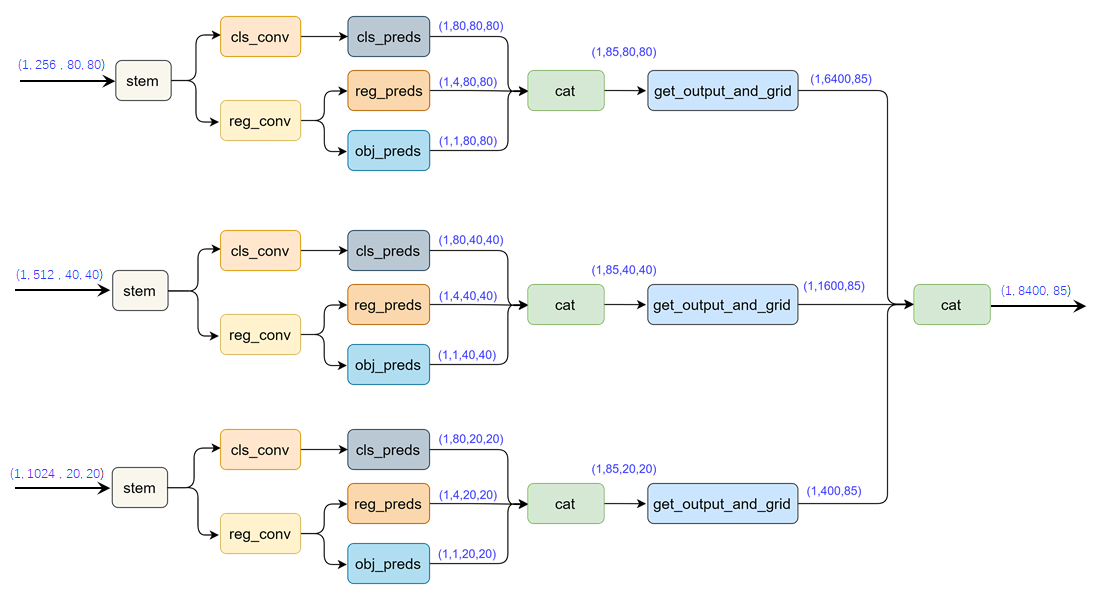
为了便于理解,我们假定图片上有3个目标框,即3个groundtruth,再假定项目有80个检测类别,则head 输出维度为85 (80+1+4),其中80为类别分数,为1为目标分数,4为bbox的坐标。
3.3.1 Decoupled Head
之前yolo 系列都是使用coupled head, yolox使用decoupled head。
coupled head 和 decoupled head 有什么差异?
- 当使用coupled head时,网络直接输出shape (1,85,80,80);
- 如果使用 decoupled head,网络会分成回归分支和分类分支,最后再汇总在一起,得到shape同样为 (1,85,80,80)。

为什么用decoupled head?
如果使用coupled head,输出channel将分类任务和回归任务放在一起,这2个任务存在冲突性。
通过实验发现替换为Decoupled Head后,不仅是模型精度上会提高,同时 网络的收敛速度也加快了,使用Decoupled Head的表达能力更好。
Yolo Head和 Decoupled Head 的对比曲线如下:

3.3.2 Anchor-free
有2种经典的anchor free目标检测模型,分别为
FCOS
和
CenterNet
,参考如下博客:
目标检测: 一文读懂 CenterNet (CVPR 2019)_大林兄的博客-CSDN博客
目标检测: 一文读懂 FCOS (CVPR 2019)_大林兄的博客-CSDN博客
如果只指定一个点作为positive,很多其他高质量的预测如果不纳入来计算loss,这不利于训练,
Yolox使用FCOS中的center sampling方法,将目标中心3x3的区域内的像素点都作为 target,这在Yolox论文中称为 multi positives。
3.4 如何计算Loss
进行Loss 计算前,需要将不同特征层的输出预测框映射回原图。通过
get_output_and_grid
函数实现 ,核心代码如下:
hsize, wsize = output.shape[-2:]# hsize:80, wsize:80
yv, xv = meshgrid([torch.arange(hsize), torch.arange(wsize)])#yv, xv shape: (1,85,80,80),(1,85,80,80)
grid = torch.stack((xv, yv),2).view(1,1, hsize, wsize,2).type(dtype)#grid shape: (1,1,85,80,80)
grid = grid.view(1,-1,2)#grid shape: (1,6400,2)
output[...,:2]=(output[...,:2]+ grid)* stride
#output shape: (1,6400,85)
output[...,2:4]= torch.exp(output[...,2:4])* stride
#output shape: (1,6400,85)
代码中前4行是生成gird的坐标,第5行则计算bbox中心坐标。
因为head关于bbox的输出位置是相对grid的距离,所以映射回原图需要加上grid坐标。
宽高尺寸为正数,所以对output的宽高先做指数运算,再乘上stride,得到原图尺度下的宽高。
最后将3个特征图上的预测框结果合并,得到所有的预测框结果,输出shape为(1,8400,85)。
得到预测结果之后,如果是推断,只要输出
output det
即可。
如果是训练,需要通过函数
get_assignments
先得到 8400个预测框的
target
,即标签分配,随后再进行
loss
计算。

如果得到了 target,loss计算公式如下:
l
o
s
s
=
λ
⋅
l
o
s
s
r
e
g
+
l
o
s
s
o
b
j
+
l
o
s
s
c
l
s
+
l
o
s
s
l
1
loss=\lambda \cdot loss_{reg}+loss_{obj}+loss_{cls}+loss_{l1}
loss=λ⋅lossreg+lossobj+losscls+lossl1
代码实现如下:
loss_iou =(self.iou_loss(bbox_preds.view(-1,4)[fg_masks], reg_targets)).sum()/ num_fg
loss_obj =(self.bcewithlog_loss(obj_preds.view(-1,1), obj_targets)).sum()/ num_fg
loss_cls =(self.bcewithlog_loss(cls_preds.view(-1, self.num_classes)[fg_masks], cls_targets)).sum()/ num_fg
if self.use_l1:
loss_l1 =(self.l1_loss(origin_preds.view(-1,4)[fg_masks], l1_targets)).sum()/ num_fg
else:
loss_l1 =0.0
reg_weight =5.0
loss = reg_weight * loss_iou + loss_obj + loss_cls + loss_l1
3.5 如何分配标签?
经过 3个head的输出,一共有8400个预测框,这8400个预测框的标签是什么?
这8400个预测框绝大部分是负样本,只有少数是正样本,直接对8400个预测框做精确的标签分配,计算量较大。
yolox分配标签过程分为2步:(1) 粗筛选;(2)simOTA 精确分配标签
step1:粗筛选
筛选出潜在包含正样本的预测框,参见代码: get_in_boxes_info
如果
anchor bbox
中心落在
groundtruth bbox
或
fixed bbox
,则被选中为候选正样本。
<1> 判断 anchor bbox 中心是否在 groundtruth bbox
step1:计算groundtruth的左上角、右下角坐标
groundtruth的 gt_bboxes_per_image为:[x_center,y_center,w,h]。
可以根据此信息可以计算出groundtruth 的左上角、右下角坐标:
## 方法1(groundtruth bbox): l,r,t,b
gt_bboxes_per_image_l =((gt_bboxes_per_image[:,0]-0.5* gt_bboxes_per_image[:,2]).unsqueeze(1).repeat(1, total_num_anchors))# shape:(3,8400)
gt_bboxes_per_image_r =((gt_bboxes_per_image[:,0]+0.5* gt_bboxes_per_image[:,2]).unsqueeze(1).repeat(1, total_num_anchors))# shape:(3,8400)
gt_bboxes_per_image_t =((gt_bboxes_per_image[:,1]-0.5* gt_bboxes_per_image[:,3]).unsqueeze(1).repeat(1, total_num_anchors))# shape:(3,8400)
gt_bboxes_per_image_b =((gt_bboxes_per_image[:,1]+0.5* gt_bboxes_per_image[:,3]).unsqueeze(1).repeat(1, total_num_anchors))# shape:(3,8400)

step2:判断anchor bbox 中心是否落在groudtruth边框范围内
前4行代码计算锚框中心点(x_center,y_center),和人脸标注框左上角(gt_l,gt_t),右下角(gt_r,gt_b)两个角点的相应距离。
b_l = x_centers_per_image - gt_bboxes_per_image_l # shape:(3,8400)
b_r = gt_bboxes_per_image_r - x_centers_per_image # shape:(3,8400)
b_t = y_centers_per_image - gt_bboxes_per_image_t # shape:(3,8400)
b_b = gt_bboxes_per_image_b - y_centers_per_image # shape:(3,8400)
bbox_deltas = torch.stack([b_l, b_t, b_r, b_b],2)# shape:(3,8400,4)
is_in_boxes = bbox_deltas.min(dim=-1).values >0.0# shape:(3,8400)
is_in_boxes_all = is_in_boxes.sum(dim=0)>0# shape:(8400,)
第5行将四个值叠加之后,通过第六行,判断是否都大于0? 就可以将落在groundtruth矩形范围内的所有anchors,都提取出来了。
因为ancor box的中心点,只有落在矩形范围内,这时的b_l,b_r,b_t,b_b都大于0。
<2> 判断anchor bbox 中心是否在 fixed bbox
以groundtruth的中心点为中心,在特征层尺度上做
5
×
5
5 \times 5
5×5 的正方形。
如果图片的尺寸为
640
×
640
640\times 640
640×640,且当前特征图的尺度为
80
×
80
80 \times 80
80×80,则此时stride为 8, 将
5
×
5
5 \times 5
5×5 的正方形映射回原图,fixed bbox 尺寸为
400
×
400
400 \times 400
400×400。
所以如果 ancor box的中心点落在 fixed bbox范围内,也将被选中。
## 方法2(fixed bbox): l,r,t,b
center_radius =2.5
gt_bboxes_per_image_l =(
gt_bboxes_per_image[:,0]).unsqueeze(1).repeat(1, total_num_anchors
)- center_radius * expanded_strides_per_image.unsqueeze(0)
gt_bboxes_per_image_r =(
gt_bboxes_per_image[:,0]).unsqueeze(1).repeat(1, total_num_anchors
)+ center_radius * expanded_strides_per_image.unsqueeze(0)
gt_bboxes_per_image_t =(
gt_bboxes_per_image[:,1]).unsqueeze(1).repeat(1, total_num_anchors
)- center_radius * expanded_strides_per_image.unsqueeze(0)
gt_bboxes_per_image_b =(
gt_bboxes_per_image[:,1]).unsqueeze(1).repeat(1, total_num_anchors
)+ center_radius * expanded_strides_per_image.unsqueeze(0)

未选中的预测框为负样本,直接打上负样本标签。
(2) step2:simOTA
经过粗筛选,假设筛选出1000个预测框为潜在正样本,这1000个预测框并不是都作为正样本分配标签,而是需要进一步做标签分配,yolox使用simOTA方法,该方法的详细介绍参见博客:
目标检测: 一文读懂 OTA 标签分配_大林兄的博客-CSDN博客
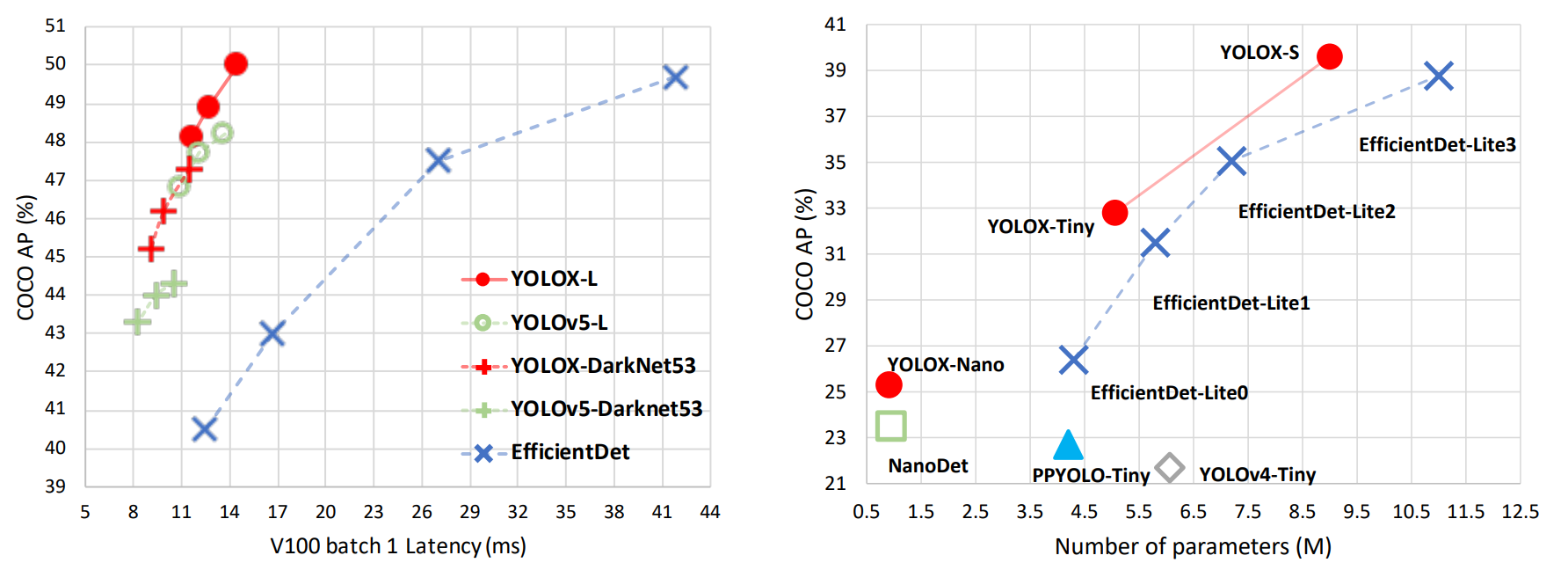
4 YOLOX 性能效果
YOLOX的性能超越了YOLOV5,YOLOX-X的AP值达到了51.2,超过YOLOV5-X 0.8个百分点,此外模型推理速度和参数量都具有比较大的优势。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-YRqdfXsk-1649596892595)(C:\Users\Sunny\AppData\Roaming\Typora\typora-user-images\image-20220410204605863.png)]](https://img-blog.csdnimg.cn/86d5dd8a75e04492a1d019d1520049b8.png?x-oss-process=image)
5 总结
YOLOX做出了如下贡献:
(1) 将 anchor free 方法引入到YOLO系列,性能超越了基于anchor based方法的yolov5;
(2) 采用了 decoupled head、simOTA等方法,值得借鉴。

版权归原作者 大林兄 所有, 如有侵权,请联系我们删除。