
在线测试:http://121.4.108.95:8000/index/
开源地址:https://github.com/Bump-mann/simple_ocr
首先我们看一个较简单的图标点选验证码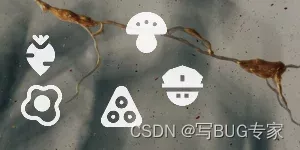
从上面图片中依次点击以下图形


笔者的思路(其实就是对着别人的抄)是先识别出图形切割下来,然后分别对比相似度,就可以得出需要点击位置啦~
模型下载链接放在文章末尾!
显而易见,识别分为两部分,以下为目标识别代码
'''
分割图标点选验证码图片的各个图标
'''import os
import sys
import time
from io import BytesIO
import onnxruntime
import torch
import torchvision
import numpy as np
import cv2
# 图像处理from PIL import Image
defpadded_resize(im, new_shape=(640,640), stride=32):try:
shape = im.shape[:2]
r =min(new_shape[0]/ shape[0], new_shape[1]/ shape[1])
new_unpad =int(round(shape[1]* r)),int(round(shape[0]* r))
dw, dh = new_shape[1]- new_unpad[0], new_shape[0]- new_unpad[1]# dw, dh = np.mod(dw, stride), np.mod(dh, stride)
dw /=2
dh /=2if shape[::-1]!= new_unpad:# resize
im = cv2.resize(im, new_unpad, interpolation=cv2.INTER_LINEAR)
top, bottom =int(round(dh -0.1)),int(round(dh +0.1))
left, right =int(round(dw -0.1)),int(round(dw +0.1))
im = cv2.copyMakeBorder(im, top, bottom, left, right, cv2.BORDER_CONSTANT, value=(114,114,114))# add border# Convert
im = im.transpose((2,0,1))[::-1]# HWC to CHW, BGR to RGB
im = np.ascontiguousarray(im)
im = torch.from_numpy(im)
im = im.float()
im /=255
im = im[None]
im = im.cpu().numpy()# torch to numpyreturn im
except:print("123")defxywh2xyxy(x):# Convert nx4 boxes from [x, y, w, h] to [x1, y1, x2, y2] where xy1=top-left, xy2=bottom-right
y = x.clone()ifisinstance(x, torch.Tensor)else np.copy(x)
y[:,0]= x[:,0]- x[:,2]/2# top left x
y[:,1]= x[:,1]- x[:,3]/2# top left y
y[:,2]= x[:,0]+ x[:,2]/2# bottom right x
y[:,3]= x[:,1]+ x[:,3]/2# bottom right yreturn y
defbox_iou(box1, box2):"""
Return intersection-over-union (Jaccard index) of boxes.
Both sets of boxes are expected to be in (x1, y1, x2, y2) format.
Arguments:
box1 (Tensor[N, 4])
box2 (Tensor[M, 4])
Returns:
iou (Tensor[N, M]): the NxM matrix containing the pairwise
IoU values for every element in boxes1 and boxes2
"""defbox_area(box):# box = 4xnreturn(box[2]- box[0])*(box[3]- box[1])
area1 = box_area(box1.T)
area2 = box_area(box2.T)# inter(N,M) = (rb(N,M,2) - lt(N,M,2)).clamp(0).prod(2)
inter =(torch.min(box1[:,None,2:], box2[:,2:])- torch.max(box1[:,None,:2], box2[:,:2])).clamp(0).prod(2)return inter /(area1[:,None]+ area2 - inter)# iou = inter / (area1 + area2 - inter)defnon_max_suppression(prediction, conf_thres=0.25, iou_thres=0.45, classes=None, agnostic=False, multi_label=False,
labels=(), max_det=300):"""Runs Non-Maximum Suppression (NMS) on inference results
Returns:
list of detections, on (n,6) tensor per image [xyxy, conf, cls]
"""
nc = prediction.shape[2]-5# number of classes
xc = prediction[...,4]> conf_thres # candidates# Checksassert0<= conf_thres <=1,f'Invalid Confidence threshold {conf_thres}, valid values are between 0.0 and 1.0'assert0<= iou_thres <=1,f'Invalid IoU {iou_thres}, valid values are between 0.0 and 1.0'# Settings
min_wh, max_wh =2,7680# (pixels) minimum and maximum box width and height
max_nms =30000# maximum number of boxes into torchvision.ops.nms()
time_limit =10.0# seconds to quit after
redundant =True# require redundant detections
multi_label &= nc >1# multiple labels per box (adds 0.5ms/img)
merge =False# use merge-NMS
t = time.time()
output =[torch.zeros((0,6), device=prediction.device)]* prediction.shape[0]for xi, x inenumerate(prediction):# image index, image inference# Apply constraints
x[((x[...,2:4]< min_wh)|(x[...,2:4]> max_wh)).any(1),4]=0# width-height
x = x[xc[xi]]# confidence# Cat apriori labels if autolabellingif labels andlen(labels[xi]):
lb = labels[xi]
v = torch.zeros((len(lb), nc +5), device=x.device)
v[:,:4]= lb[:,1:5]# box
v[:,4]=1.0# conf
v[range(len(lb)), lb[:,0].long()+5]=1.0# cls
x = torch.cat((x, v),0)# If none remain process next imageifnot x.shape[0]:continue# Compute conf
x[:,5:]*= x[:,4:5]# conf = obj_conf * cls_conf# Box (center x, center y, width, height) to (x1, y1, x2, y2)
box = xywh2xyxy(x[:,:4])# Detections matrix nx6 (xyxy, conf, cls)if multi_label:
i, j =(x[:,5:]> conf_thres).nonzero(as_tuple=False).T
x = torch.cat((box[i], x[i, j +5,None], j[:,None].float()),1)else:# best class only
conf, j = x[:,5:].max(1, keepdim=True)
x = torch.cat((box, conf, j.float()),1)[conf.view(-1)> conf_thres]# Filter by classif classes isnotNone:
x = x[(x[:,5:6]== torch.tensor(classes, device=x.device)).any(1)]# Apply finite constraint# if not torch.isfinite(x).all():# x = x[torch.isfinite(x).all(1)]# Check shape
n = x.shape[0]# number of boxesifnot n:# no boxescontinueelif n > max_nms:# excess boxes
x = x[x[:,4].argsort(descending=True)[:max_nms]]# sort by confidence# Batched NMS
c = x[:,5:6]*(0if agnostic else max_wh)# classes
boxes, scores = x[:,:4]+ c, x[:,4]# boxes (offset by class), scores
i = torchvision.ops.nms(boxes, scores, iou_thres)# NMSif i.shape[0]> max_det:# limit detections
i = i[:max_det]if merge and(1< n <3E3):# Merge NMS (boxes merged using weighted mean)# update boxes as boxes(i,4) = weights(i,n) * boxes(n,4)
iou = box_iou(boxes[i], boxes)> iou_thres # iou matrix
weights = iou * scores[None]# box weights
x[i,:4]= torch.mm(weights, x[:,:4]).float()/ weights.sum(1, keepdim=True)# merged boxesif redundant:
i = i[iou.sum(1)>1]# require redundancy
output[xi]= x[i]if(time.time()- t)> time_limit:break# time limit exceededreturn output
defxyxy2xywh(x):# Convert nx4 boxes from [x1, y1, x2, y2] to [x, y, w, h] where xy1=top-left, xy2=bottom-right
y = x.clone()ifisinstance(x, torch.Tensor)else np.copy(x)
y[:,0]=(x[:,0]+ x[:,2])/2# x center
y[:,1]=(x[:,1]+ x[:,3])/2# y center
y[:,2]= x[:,2]- x[:,0]# width
y[:,3]= x[:,3]- x[:,1]# heightreturn y
defis_ascii(s=''):# Is string composed of all ASCII (no UTF) characters? (note str().isascii() introduced in python 3.7)
s =str(s)# convert list, tuple, None, etc. to strreturnlen(s.encode().decode('ascii','ignore'))==len(s)defbox_label(self, box, label='', color=(128,128,128), txt_color=(255,255,255)):# Add one xyxy box to image with labelif self.pil ornot is_ascii(label):
self.draw.rectangle(box, width=self.lw, outline=color)# boxif label:
w, h = self.font.getsize(label)# text width, height
outside = box[1]- h >=0# label fits outside box
self.draw.rectangle((box[0],
box[1]- h if outside else box[1],
box[0]+ w +1,
box[1]+1if outside else box[1]+ h +1), fill=color)# self.draw.text((box[0], box[1]), label, fill=txt_color, font=self.font, anchor='ls') # for PIL>8.0
self.draw.text((box[0], box[1]- h if outside else box[1]), label, fill=txt_color, font=self.font)else:# cv2
p1, p2 =(int(box[0]),int(box[1])),(int(box[2]),int(box[3]))
cv2.rectangle(self.im, p1, p2, color, thickness=self.lw, lineType=cv2.LINE_AA)if label:
tf =max(self.lw -1,1)# font thickness
w, h = cv2.getTextSize(label,0, fontScale=self.lw /3, thickness=tf)[0]# text width, height
outside = p1[1]- h -3>=0# label fits outside box
p2 = p1[0]+ w, p1[1]- h -3if outside else p1[1]+ h +3
cv2.rectangle(self.im, p1, p2, color,-1, cv2.LINE_AA)# filled
cv2.putText(self.im, label,(p1[0], p1[1]-2if outside else p1[1]+ h +2),0, self.lw /3, txt_color,
thickness=tf, lineType=cv2.LINE_AA)defreturn_coordinates(xyxy, conf):
conf =float(conf.numpy())
gain =1.02
pad =10
xyxy = torch.tensor(xyxy).view(-1,4)
b = xyxy2xywh(xyxy)# boxes
b[:,2:]= b[:,2:]* gain + pad # box wh * gain + pad
xyxy = xywh2xyxy(b).long()
c1, c2 =(int(xyxy[0,0])+6,int(xyxy[0,1])+6),(int(xyxy[0,2])-6,int(xyxy[0,3])-6)# print(f"leftTop:{c1},rightBottom:{c2},Confidence:{conf*100}%")
result_dict ={"leftTop": c1,"rightBottom": c2,"Confidence": conf}return result_dict
defclip_coords(boxes, shape):# Clip bounding xyxy bounding boxes to image shape (height, width)ifisinstance(boxes, torch.Tensor):# faster individually
boxes[:,0].clamp_(0, shape[1])# x1
boxes[:,1].clamp_(0, shape[0])# y1
boxes[:,2].clamp_(0, shape[1])# x2
boxes[:,3].clamp_(0, shape[0])# y2else:# np.array (faster grouped)
boxes[:,[0,2]]= boxes[:,[0,2]].clip(0, shape[1])# x1, x2
boxes[:,[1,3]]= boxes[:,[1,3]].clip(0, shape[0])# y1, y2defscale_coords(img1_shape, coords, img0_shape, ratio_pad=None):# Rescale coords (xyxy) from img1_shape to img0_shapeif ratio_pad isNone:# calculate from img0_shape
gain =min(img1_shape[0]/ img0_shape[0], img1_shape[1]/ img0_shape[1])# gain = old / new
pad =(img1_shape[1]- img0_shape[1]* gain)/2,(img1_shape[0]- img0_shape[0]* gain)/2# wh paddingelse:
gain = ratio_pad[0][0]
pad = ratio_pad[1]
coords[:,[0,2]]-= pad[0]# x padding
coords[:,[1,3]]-= pad[1]# y padding
coords[:,:4]/= gain
clip_coords(coords, img0_shape)return coords
defonnx_model_main(path):# onnx
session = onnxruntime.InferenceSession("./models/图标点选_分割图片.onnx", providers=["CPUExecutionProvider"])
start = time.time()
image =open(path,"rb").read()
img = np.array(Image.open(BytesIO(image)))# img = cv2.imread(path)# 图像处理
img = img[:,:,:3]
im = padded_resize(img)# 模型调度
pred = session.run([session.get_outputs()[0].name],{session.get_inputs()[0].name: im})[0]
pred = torch.tensor(pred)
pred = non_max_suppression(pred, conf_thres=0.6, iou_thres=0.6, max_det=1000)# 大于百分之六十的置信度
coordinate_list =[]for i, det inenumerate(pred):
det[:,:4]= scale_coords(im.shape[2:], det[:,:4], img.shape).round()for*xyxy, conf, cls inreversed(det):# 返回坐标和置信度
coordinates = return_coordinates(xyxy, conf)print(coordinates)
coordinate_list.append(coordinates)# 坐标列表
coordinate =sorted(coordinate_list, key=lambda a: a["Confidence"])
data_list =[]# 用时
duration =str((time.time()- start))iflen(coordinate)==0:
data ={'message':'error','time': duration}else:# coordinate = coordinate[-1]for coordinate in coordinate_list:
x = coordinate.get('leftTop')[0]
y = coordinate.get('leftTop')[1]
w = coordinate.get('rightBottom')[0]- coordinate.get('leftTop')[0]
h = coordinate.get('rightBottom')[1]- coordinate.get('leftTop')[1]
point =f"{x}|{y}|{w}|{h}"
data ={'message':'success','time': duration,'point': point}
data.update(coordinate)
data_list.append(data)print(data_list)return data_list
defdrow_rectangle(coordinate, path):import os
if"new_%s"% path in os.listdir('./'):
img = cv2.imread("new_%s"% path)else:
img = cv2.imread(path)# 画框
result = cv2.rectangle(img, coordinate.get("leftTop"), coordinate.get("rightBottom"),(0,0,255),2)
cv2.imwrite("new_%s"% path, result)# 返回圈中矩形的图片print("返回坐标矩形成功")# python install pillow# 分割图片defcut_image(image, point, name):
lists = point.split('|')
box =(int(lists[0]),int(lists[1]),int(lists[2])+int(lists[0]),int(lists[3])+int(lists[1]))
images = image.crop(box)
images.save('{}.png'.format(name),'PNG')from os import path
defscaner_file(url):
lists =[]# 遍历当前路径下所有文件file= os.listdir(url)for f infile:# 字符串拼接# real_url = path.join (url , f)# 打印出来# print(real_url)
lists.append([url, f])return lists
# Hash值对比defcmpHash(hash1, hash2,shape=(10,10)):
n =0# hash长度不同则返回-1代表传参出错iflen(hash1)!=len(hash2):return-1# 遍历判断for i inrange(len(hash1)):# 相等则n计数+1,n最终为相似度if hash1[i]== hash2[i]:
n = n +1return n/(shape[0]*shape[1])# 均值哈希算法defaHash(img,shape=(10,10)):# 缩放为10*10
img = cv2.resize(img, shape)# 转换为灰度图
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)# s为像素和初值为0,hash_str为hash值初值为''
s =0
hash_str =''# 遍历累加求像素和for i inrange(shape[0]):for j inrange(shape[1]):
s = s + gray[i, j]# 求平均灰度
avg = s /100# 灰度大于平均值为1相反为0生成图片的hash值for i inrange(shape[0]):for j inrange(shape[1]):if gray[i, j]> avg:
hash_str = hash_str +'1'else:
hash_str = hash_str +'0'return hash_str
'''
以下是测试代码
'''if __name__ =='__main__':#图片路径
path =r'C:\Users\qiu_feng\Desktop\d1e81bb61df84abfaa41ae92a5e6c787.jpg'
coordinate_onnx = onnx_model_main(path)
num =0for j in coordinate_onnx:
num +=1
image = Image.open(path)# 读取图片
name = path[:-4:]+'__切割后图片_'+str(num)
cut_image(image, j['point'], name)
效果如下: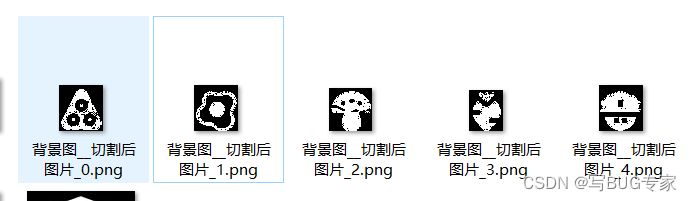
有些龟裂是因为我加了一些自以为可以“提高”识别效果的东西…
以下是相似度代码
'''
图片相似度对比 适用于图标点选
'''import os
import cv2
import tensorflow as tf
import numpy as np
from PIL import Image
from.nets.siamese import siamese
from.utils.utils import letterbox_image, preprocess_input, cvtColor, show_config
# -----------nets----------------------------------------## 使用自己训练好的模型预测需要修改model_path参数# ---------------------------------------------------#classSiamese(object):
_defaults ={# -----------------------------------------------------## 使用自己训练好的模型进行预测一定要修改model_path# model_path指向logs文件夹下的权值文件# -----------------------------------------------------#"model_path":'./models/图标点选_相似度.h5',# -----------------------------------------------------## 输入图片的大小。# -----------------------------------------------------#"input_shape":[60,60],# --------------------------------------------------------------------## 该变量用于控制是否使用letterbox_image对输入图像进行不失真的resize# 否则对图像进行CenterCrop# --------------------------------------------------------------------#"letterbox_image":True,}@classmethoddefget_defaults(cls, n):if n in cls._defaults:return cls._defaults[n]else:return"Unrecognized attribute name '"+ n +"'"# ---------------------------------------------------## 初始化Siamese# ---------------------------------------------------#def__init__(self,**kwargs):
self.__dict__.update(self._defaults)for name, value in kwargs.items():setattr(self, name, value)
self.generate()
show_config(**self._defaults)# ---------------------------------------------------## 载入模型# ---------------------------------------------------#defgenerate(self):
model_path = os.path.expanduser(self.model_path)assert model_path.endswith('.h5'),'Keras model or weights must be a .h5 file.'# ---------------------------## 载入模型与权值# ---------------------------#
self.model = siamese([self.input_shape[0], self.input_shape[1],3])
self.model.load_weights(self.model_path)print('{} model loaded.'.format(model_path))@tf.functiondefget_pred(self, photo):
preds = self.model(photo, training=False)return preds
# ---------------------------------------------------## 检测图片# ---------------------------------------------------#defdetect_image(self, image_1, image_2):# ---------------------------------------------------------## 在这里将图像转换成RGB图像,防止灰度图在预测时报错。# ---------------------------------------------------------#
image_1 = cvtColor(image_1)
image_2 = cvtColor(image_2)# ---------------------------------------------------## 对输入图像进行不失真的resize# ---------------------------------------------------#
image_1 = letterbox_image(image_1,[self.input_shape[1], self.input_shape[0]], self.letterbox_image)
image_2 = letterbox_image(image_2,[self.input_shape[1], self.input_shape[0]], self.letterbox_image)# ---------------------------------------------------------## 归一化+添加上batch_s ize维度# ---------------------------------------------------------#
photo1 = np.expand_dims(preprocess_input(np.array(image_1, np.float32)),0)
photo2 = np.expand_dims(preprocess_input(np.array(image_2, np.float32)),0)# ---------------------------------------------------## 获得预测结果,output输出为概率# ---------------------------------------------------#
output = np.array(self.get_pred([photo1, photo2])[0])# plt.subplot(1, 2, 1)# plt.imshow(np.array(image_1))## plt.subplot(1, 2, 2)# plt.imshow(np.array(image_2))# plt.text(-12, -12, 'Similarity:%.3f' % output, ha='center', va='bottom', fontsize=11)# plt.show()return output
'''
以下是测试代码 (本来想着在每个代码下面加测试来着,但是认为不好就废弃掉了)
'''if __name__ =='__main__':
gpus = tf.config.experimental.list_physical_devices(device_type='GPU')for gpu in gpus:
tf.config.experimental.set_memory_growth(gpu,True)
model = Siamese()for i inrange(1,6):
image_1 = Image.open('../test/图标点选/背景图__切割后图片_{}.png'.format(i))max=0for j inrange(1,4):
image_2 = Image.open('../test/图标点选/图形_{}.png'.format(j))
probability = model.detect_image(image_1, image_2)#相似度低的就直接排除了if probability[0]>0.5:print('背景图__切割后图片_{}.png'.format(i),'和','图形_{}.png'.format(j),'相似度为:',probability)# print(image_1_name,'和',image_2_name,'相似度最高')
效果如下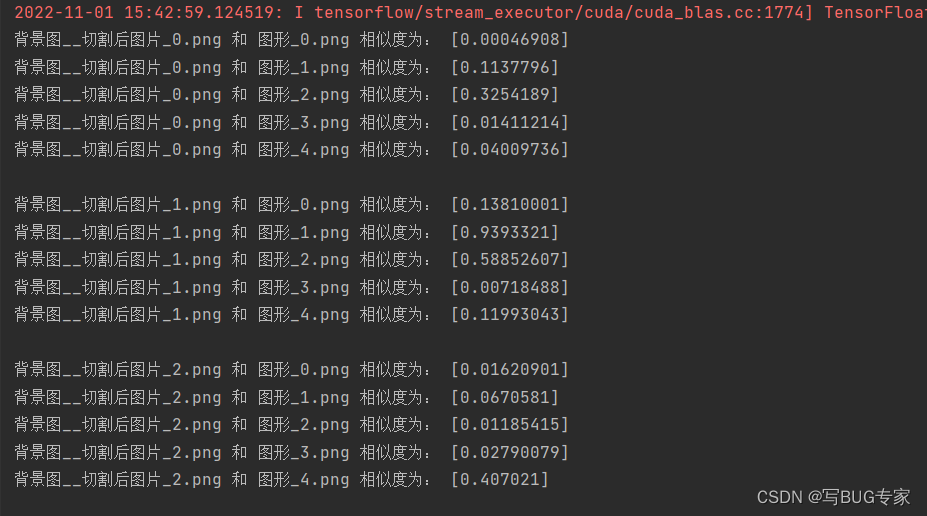
这样我们就知道每个图形的坐标及与相似度,即可得到点击坐标啦~
效果图如下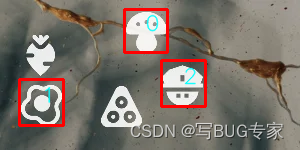
链接:https://pan.baidu.com/s/1rxY2x3J8wwgEsv0nBBaPPQ?pwd=cokk 提取码:cokk
最新模型会在github更新,最新模型请前往github获取
本文转载自: https://blog.csdn.net/qq_44749634/article/details/127205608
版权归原作者 写BUG专家 所有, 如有侵权,请联系我们删除。
版权归原作者 写BUG专家 所有, 如有侵权,请联系我们删除。