
工作需要, 又需要对yolov5 输出的模型进行转onnx 再用c++进行后续处理。
两个问题。
- yolov5 的模型输出的是个啥啊?
- 转成onnx后输出的和yolov5输出的处理是否一样呢?
关于第一个问题,yolov5 的模型输出的是个啥啊?
以前只知道抄代码就行, 也不知道里面干了啥 , 输出的后处理也都是由现成的代码来实现。 我也懒得考虑内部的原理, 反正代码正常跑。系统正常运行就可以。
但是今天不行啦, 得自己解析输出。 被逼无奈之下, 只能仔细研究下yolov5的模型和其内部的神经网络结构。关于神经网络的结构, 主要是在文件 models\yolov5s.yaml 中定义的。具体的我在下面的文件中注释写进去了。
# YOLOv5 🚀 by Ultralytics, GPL-3.0 license# Parameters
nc:80 # number of classes
depth_multiple:0.33 # model depth multiple
width_multiple:0.50 # layer channel multiple
anchors:-[10,13,16,30,33,23] # P3/8-[30,61,62,45,59,119] # P4/16-[116,90,156,198,373,326] # P5/32# YOLOv5 v6.0 backbone
backbone:# [from, number, module, args] # 关键是这个说明, 这里得分成4个看,分别是# [from 数据从哪里来, number 有几个这样的层, module 层的名称, args参数] [[-1,1, Conv,[64,6,2,2]], # 0-P1/2[-1,1, Conv,[128,3,2]], # 1-P2/4#下面这个配置的意思是,数据从-1层(上一层)来,创建3层类名叫C3的层, 参数是128[-1,3, C3,[128]],#下面这个配置的意思是,数据从-1层(上一层)来,创建1层类名叫Conv的层, 参数是256, 3, 2[-1,1, Conv,[256,3,2]], # 3-P3/8[-1,6, C3,[256]],[-1,1, Conv,[512,3,2]], # 5-P4/16[-1,9, C3,[512]],[-1,1, Conv,[1024,3,2]], # 7-P5/32[-1,3, C3,[1024]],[-1,1, SPPF,[1024,5]], # 9]# YOLOv5 v6.0 head
head:[[-1,1, Conv,[512,1,1]],[-1,1, nn.Upsample,[None,2, 'nearest']],[[-1,6],1, Concat,[1]], # cat backbone P4
[-1,3, C3,[512, False]], # 13[-1,1, Conv,[256,1,1]],[-1,1, nn.Upsample,[None,2, 'nearest']],[[-1,4],1, Concat,[1]], # cat backbone P3
[-1,3, C3,[256, False]], # 17(P3/8-small)[-1,1, Conv,[256,3,2]],[[-1,14],1, Concat,[1]], # cat head P4
[-1,3, C3,[512, False]], # 20(P4/16-medium)[-1,1, Conv,[512,3,2]],[[-1,10],1, Concat,[1]], # cat head P5
[-1,3, C3,[1024, False]], # 23(P5/32-large)[[17,20,23],1, Detect,[nc,anchors]], # Detect(P3, P4, P5)]
这个配置文件的解析是在models\yolo.py 文件中 由 parse_model() 方法执行解析的。
下面贴一下这个函数的代码,如果没兴趣可以不看
从代码中可以看的出来,配置文件中的最后一列 arg参数, 并不是跟代码中class的参数一一对应的。
例如Conv参数在代码中需要好多个参数, 而配置文件中只配置了3个。(我非常反感这种配置来配置去,搞脑子的写法, 因为非常的不方便代码理解, 不如直接在代码中硬编码, 最好的代码是一看就懂。
)
defparse_model(d, ch):# model_dict, input_channels(3)# Parse a YOLOv5 model.yaml dictionary
LOGGER.info(f"\n{'':>3}{'from':>18}{'n':>3}{'params':>10}{'module':<40}{'arguments':<30}")
anchors, nc, gd, gw, act = d['anchors'], d['nc'], d['depth_multiple'], d['width_multiple'], d.get('activation')if act:
Conv.default_act =eval(act)# redefine default activation, i.e. Conv.default_act = nn.SiLU()
LOGGER.info(f"{colorstr('activation:')}{act}")# print
na =(len(anchors[0])//2)ifisinstance(anchors,list)else anchors # number of anchors
no = na *(nc +5)# number of outputs = anchors * (classes + 5)
layers, save, c2 =[],[], ch[-1]# layers, savelist, ch outfor i,(f, n, m, args)inenumerate(d['backbone']+ d['head']):# from, number, module, args
m =eval(m)ifisinstance(m,str)else m # eval stringsfor j, a inenumerate(args):with contextlib.suppress(NameError):
args[j]=eval(a)ifisinstance(a,str)else a # eval strings
n = n_ =max(round(n * gd),1)if n >1else n # depth gainif m in{
Conv, GhostConv, Bottleneck, GhostBottleneck, SPP, SPPF, DWConv, MixConv2d, Focus, CrossConv,
BottleneckCSP, C3, C3TR, C3SPP, C3Ghost, nn.ConvTranspose2d, DWConvTranspose2d, C3x}:
c1, c2 = ch[f], args[0]if c2 != no:# if not output
c2 = make_divisible(c2 * gw,8)
args =[c1, c2,*args[1:]]if m in{BottleneckCSP, C3, C3TR, C3Ghost, C3x}:
args.insert(2, n)# number of repeats
n =1elif m is nn.BatchNorm2d:
args =[ch[f]]elif m is Concat:
c2 =sum(ch[x]for x in f)# TODO: channel, gw, gdelif m in{Detect, Segment}:
args.append([ch[x]for x in f])ifisinstance(args[1],int):# number of anchors
args[1]=[list(range(args[1]*2))]*len(f)if m is Segment:
args[3]= make_divisible(args[3]* gw,8)elif m is Contract:
c2 = ch[f]* args[0]**2elif m is Expand:
c2 = ch[f]// args[0]**2else:
c2 = ch[f]print("模型结构"+str(m)+str(args)+"\r\n")
m_ = nn.Sequential(*(m(*args)for _ inrange(n)))if n >1else m(*args)# module
t =str(m)[8:-2].replace('__main__.','')# module type
np =sum(x.numel()for x in m_.parameters())# number params
m_.i, m_.f, m_.type, m_.np = i, f, t, np # attach index, 'from' index, type, number params
LOGGER.info(f'{i:>3}{str(f):>18}{n_:>3}{np:10.0f}{t:<40}{str(args):<30}')# print
save.extend(x % i for x in([f]ifisinstance(f,int)else f)if x !=-1)# append to savelist
layers.append(m_)if i ==0:
ch =[]
ch.append(c2)return nn.Sequential(*layers),sorted(save)
回归正题, 根据yolov5s.yaml配置文件来看, 模型的最后一层是Detect层
只要看懂了Detect的代码既能理解yolov5到底输出了啥。
为方便快速理解,我下面把Detect层的 class 源代码贴出来。
源代码在models\yolo.py 文件中 38 行
classDetect(nn.Module):# YOLOv5 Detect head for detection models
stride =None# strides computed during build
dynamic =False# force grid reconstruction
export =False# export modedef__init__(self, nc=80, anchors=(), ch=(), inplace=True):# detection layersuper().__init__()
self.nc = nc # number of classes
self.no = nc +5# number of outputs per anchor
self.nl =len(anchors)# number of detection layers
self.na =len(anchors[0])//2# number of anchors
self.grid =[torch.empty(0)for _ inrange(self.nl)]# init grid
self.anchor_grid =[torch.empty(0)for _ inrange(self.nl)]# init anchor grid
self.register_buffer('anchors', torch.tensor(anchors).float().view(self.nl,-1,2))# shape(nl,na,2)
self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na,1)for x in ch)# output conv
self.inplace = inplace # use inplace ops (e.g. slice assignment)defforward(self, x):
z =[]# inference outputfor i inrange(self.nl):
x[i]= self.m[i](x[i])# conv
bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
x[i]= x[i].view(bs, self.na, self.no, ny, nx).permute(0,1,3,4,2).contiguous()ifnot self.training:# inferenceif self.dynamic or self.grid[i].shape[2:4]!= x[i].shape[2:4]:
self.grid[i], self.anchor_grid[i]= self._make_grid(nx, ny, i)ifisinstance(self, Segment):# (boxes + masks)
xy, wh, conf, mask = x[i].split((2,2, self.nc +1, self.no - self.nc -5),4)
xy =(xy.sigmoid()*2+ self.grid[i])* self.stride[i]# xy
wh =(wh.sigmoid()*2)**2* self.anchor_grid[i]# wh
y = torch.cat((xy, wh, conf.sigmoid(), mask),4)else:# Detect (boxes only)
xy, wh, conf = x[i].sigmoid().split((2,2, self.nc +1),4)
xy =(xy *2+ self.grid[i])* self.stride[i]# xy
wh =(wh *2)**2* self.anchor_grid[i]# wh# xy 是中心点# wh 是宽高# conf 是confidence 即可信度
y = torch.cat((xy, wh, conf),4)
z.append(y.view(bs, self.na * nx * ny, self.no))return x if self.training else(torch.cat(z,1),)if self.export else(torch.cat(z,1), x)def_make_grid(self, nx=20, ny=20, i=0, torch_1_10=check_version(torch.__version__,'1.10.0')):
d = self.anchors[i].device
t = self.anchors[i].dtype
shape =1, self.na, ny, nx,2# grid shape
y, x = torch.arange(ny, device=d, dtype=t), torch.arange(nx, device=d, dtype=t)
yv, xv = torch.meshgrid(y, x, indexing='ij')if torch_1_10 else torch.meshgrid(y, x)# torch>=0.7 compatibility
grid = torch.stack((xv, yv),2).expand(shape)-0.5# add grid offset, i.e. y = 2.0 * x - 0.5
anchor_grid =(self.anchors[i]* self.stride[i]).view((1, self.na,1,1,2)).expand(shape)return grid, anchor_grid
从代码
# xy 是中心点# wh 是宽高# conf 是confidence 即可信度
y = torch.cat((xy, wh, conf),4)
中可以看的出, 这里是输出的主要数据的格式, 分别是3个参数 xy 中心点, wh 宽高,conf 可信度
经过调试发现数据的格式如下。
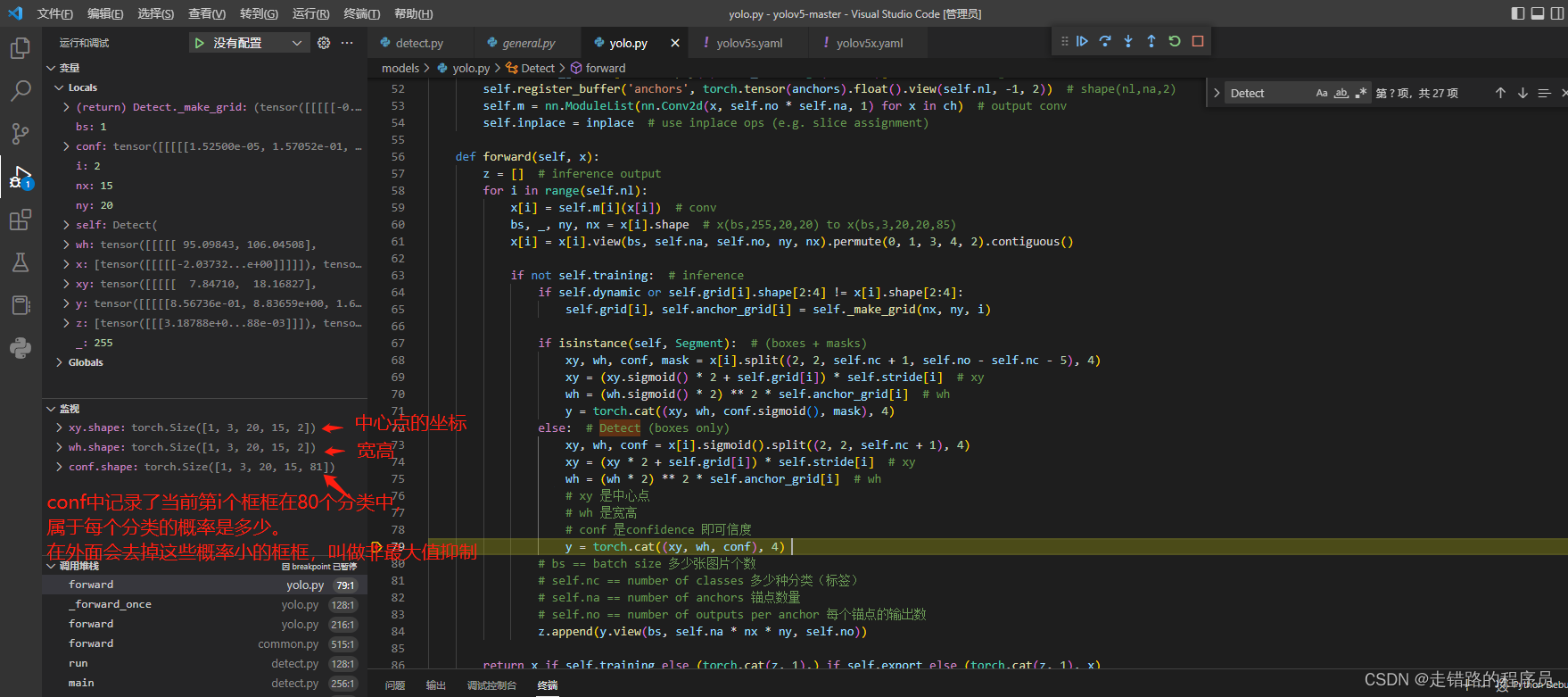
关键要看shape的最后一位,在这一步的时候,不是最终输出的格式,这里只是把它们合并起来了。后面还有个y.view进行了重新改变维度, 让这个组合的矩阵变的更加的直观, 改变维度后, 它的shape变成了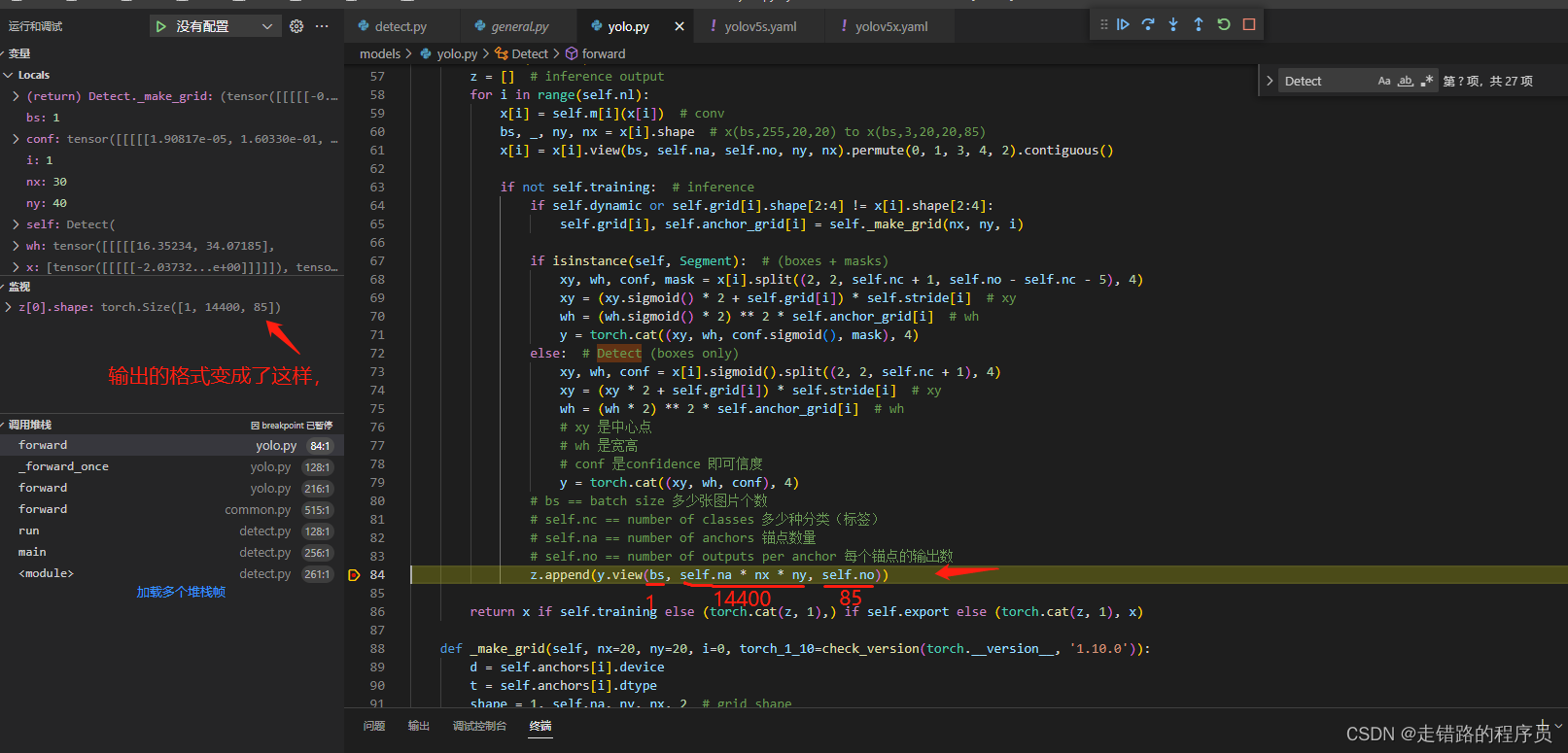
实际内部存储仍然是
[[[xy1,wh1,conf1,conf2,...,conf81],[xy2,wh2,conf1,conf2,...,conf81],[xy3,wh3,conf1,conf2,...,conf81],....]]
这里再补充一下,实际内部格式是
[[[x1,y1,w1,h1,conf1,conf2,...,conf81],[x2,y2,w2,h2,conf1,conf2,...,conf81],[x3,y3,w3,h3,conf1,conf2,...,conf81],....]]
这里再补充一下,并非每一行都是按照同样的算法计算最后的box, 需要乘上一个参数 anchors,
anchors参数在yolov5s.yaml中有定义, 关于什么是 anchors 这里不展开讲, (太多,我也没理解透,不敢乱讲)
我自己的大致理解是, 这3组参数,分别对应不同缩放图片的锚点参数,缩放倍数分别是 8倍,16倍,32倍。
起到可识别大物品和小物品的作用。(关于这3组框框,仅为我个人见解不一定正确。仅供参考)
anchors:-[10,13,16,30,33,23] # P3/8-[30,61,62,45,59,119] # P4/16-[116,90,156,198,373,326] # P5/32
[[[x1,y1,w1,h1,conf1,conf2,...,conf81],#这里应该是8倍的数据[x2,y2,w2,h2,conf1,conf2,...,conf81],#这里应该是16倍的数据[x3,y3,w3,h3,conf1,conf2,...,conf81],#这里应该是32倍的数据[x4,y4,w4,h4,conf1,conf2,...,conf81],#这里应该是8倍的数据[x5,y5,w5,h5,conf1,conf2,...,conf81],#这里应该是16倍的数据[x6,y6,w6,h6,conf1,conf2,...,conf81],#这里应该是32倍的数据....]]
这里一行数据,代表一个识别的框框box,后面的conf1到81分别是这个框框在每个标签类上的可信度。
这里的xy,wh的单位,不是像素哦, 是归一化后的数值, 需要按比例转换成像素值(还需要根据锚点anchors 进行转换)。 然后画到图片上就行了
xy的坐标是框框中心点的坐标,而不是左上角的坐标哦。
知道了存储的数据格式,后续的处理,实际上就很简单了。
分别是去掉可信度比较低的框框, 叫做非极值抑制,也就是这个函数non_max_suppression(). 有的叫 nms
然后就是把可信度比较高的框框画到图片上。剩下的应该都能看的懂。
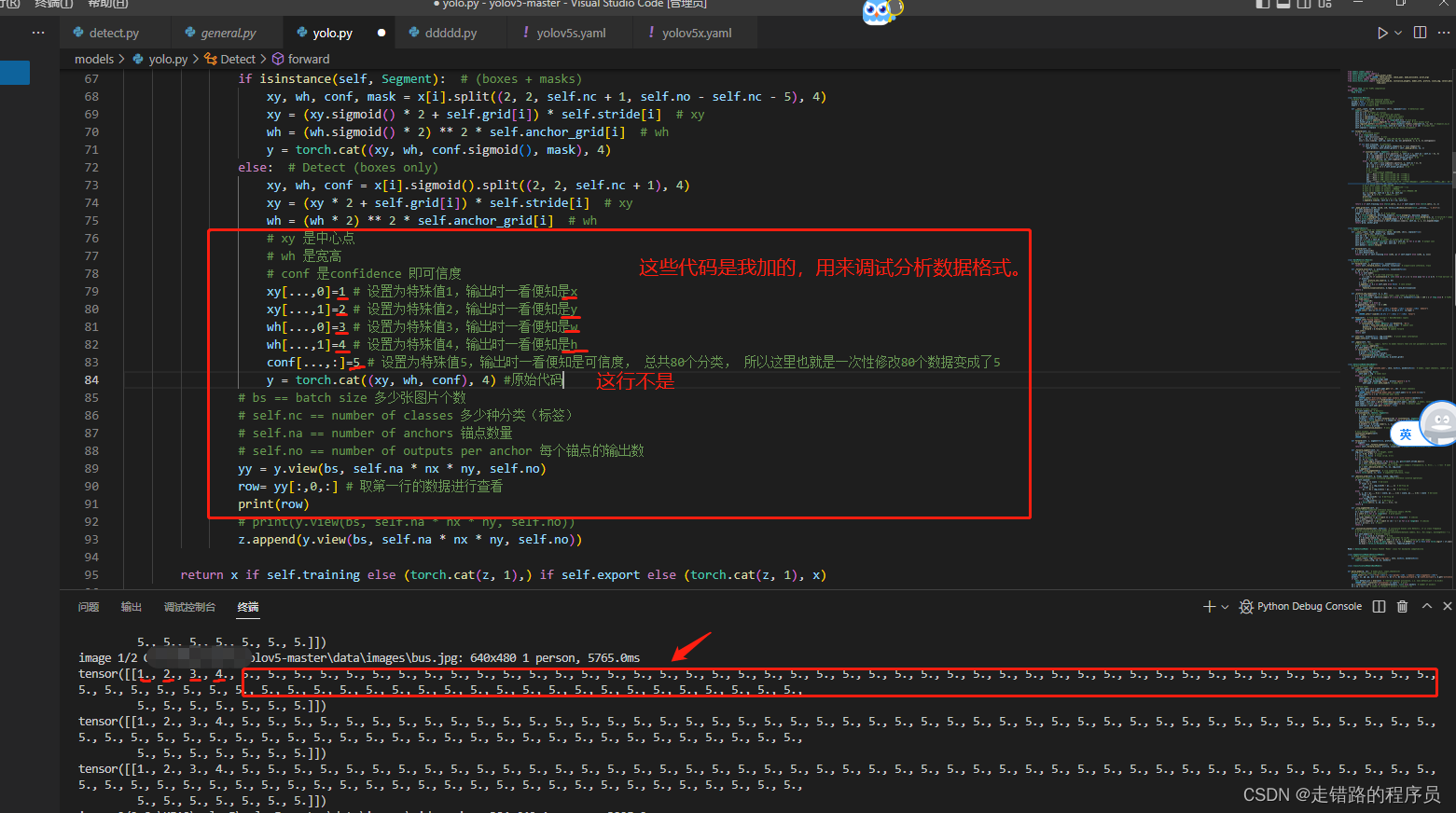
关于我是怎么知道最终数据格式并知道其每个维度的数据的意义的?
实际上我并没有查看yolov5的论文(其实是没怎么看明白!!!), 而是用了比较程序员式的方法 ----> 调试代码, 数据改成特殊数值,然后输出就知道啦。 方法分享给大家, 愿大家可以用此方法分析更多的框架。
版权归原作者 走错路的程序员 所有, 如有侵权,请联系我们删除。