
相机标定笔记
坐标系转换
之前只是停留在会用的阶段,一直没去读懂计算的原理,今天通读了大佬的文章,写的言简意赅,感谢感谢~~特此记录一下,仅用作个人笔记
贴链接,十分感谢~
https://blog.csdn.net/weixin_44278406/article/details/112986651
https://blog.csdn.net/guyuealian/article/details/104184551
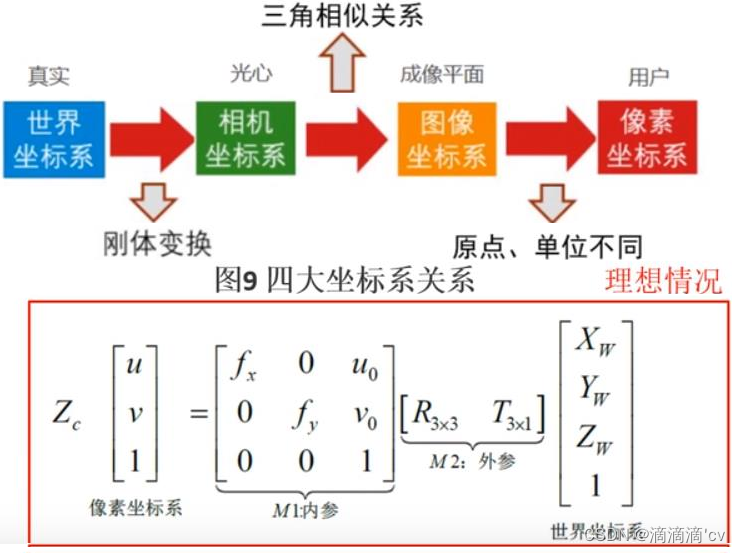
四个不同类型的坐标系
将三维物体转换成照片上的二维坐标,由四个坐标系进行转换。
1. 世界坐标系
世界坐标系是一个特殊坐标系,它建立了描述其他坐标系需要的参考框架。能够用世界坐标系描述其他坐标系的位置,而不能用更大的、外部的坐标系描述世界坐标系。从非技术意义上讲,世界坐标系建立的是我们所关心的最大坐标系,而不必真的是整个世界。
用
(
X
w
,
Y
w
,
Z
w
)
(X_w,Y_w,Z_w)
(Xw,Yw,Zw)来表示,世界坐标系可通过旋转和平移得到相机坐标系。
2. 相机坐标系
以相机透镜的几何中心(光心)为原点,坐标系满足右手法则,用
(
X
c
,
Y
c
,
Z
c
)
(X_c,Y_c,Z_c)
(Xc,Yc,Zc)来表示;相机光轴为坐标系的Z轴,X轴水平,Y轴竖直。
3. 图像物理坐标系
以CCD图像的中心为原点,坐标由
(
x
,
y
)
(x, y)
(x,y) 表示,图像坐标系的单位,一般是毫米,坐标原点为相机光轴与成像平面的交点(一般情况下,这个交点是接近于图像的正中心)

CCD,英文全称:Charge coupled Device,中文全称:电荷耦合元件,可以称为CCD图像传感器。CCD是一种半导体器件,能够把光学影像转化为数字信号。 CCD上植入的微小光敏物质称作像素(Pixel)。一块CCD上包含的像素数越多,其提供的画面分辨率也就越高。
4. 图像像素坐标系
其实,当我们提及一个图像时,通常指的是图像的像素坐标系。像素坐标系的原点在左上角,并且单位为像素。
将图像坐标系的原点
O
1
O_1
O1 ,转化到以
O
0
O_0
O0 为原点的坐标系中。使用的原因:
- 如果使用图像坐标系,单位mm,其实不太好衡量具体的图像,如果按照统一的像素标准,比较容易衡量图像的质量
- 如果使用图像坐标系,然后就有四个象限,这样会有正负数的问题,但是转换成像素坐标系后,都为整数。在后续的操作和运算中,都简化很多。
坐标转换
针孔模型(The basic pinhole model)。这种模型在数学上是三维空间到二维平面(image plane or focal plane)的中心投影,由一个
3
×
4
3 × 4
3×4 投影矩阵
P
=
K
[
R
∣
t
]
P = K [ R | t ]
P=K[R∣t]来描述,
K
K
K 为相机内参(internal camera parameters),
[
R
∣
t
]
[R|t]
[R∣t]为外参(external parameters)。
世界坐标 → 相机坐标(刚性变换)
[
X
c
Y
c
Z
c
1
]
=
[
R
t
0
1
∗
3
1
]
[
X
w
Y
w
Z
w
1
]
\begin{bmatrix}X_c \\ Y_c \\ Z_c \\ 1 \end{bmatrix} = \begin{bmatrix}R & t\\\\ 0_{1*3} & 1 \end{bmatrix} \begin{bmatrix}X_w \\ Y_w \\ Z_w \\ 1 \end{bmatrix}
⎣⎡XcYcZc1⎦⎤=⎣⎡R01∗3t1⎦⎤⎣⎡XwYwZw1⎦⎤
X
c
,
Y
c
,
Z
c
X_c,Y_c,Z_c
Xc,Yc,Zc代表相机坐标;
X
w
,
Y
w
,
Z
w
X_w,Y_w,Z_w
Xw,Yw,Zw代表世界坐标;R代表正交单位旋转矩阵,t代表三维平移矢量。
根据旋转角度可以分别得三个方向上的旋转矩阵,而旋转矩阵即为他们的乘积:
R
=
R
x
∗
R
y
∗
R
z
R = R_x * R_y * R_z
R=Rx∗Ry∗Rz
顺便记录一下三个旋转矩阵的公式,经常忘记。
绕
X
X
X旋转
θ
\theta
θ度
[
X
c
Y
c
Z
c
]
=
[
1
0
0
0
c
o
s
θ
s
i
n
θ
0
−
s
i
n
θ
c
o
s
θ
]
[
X
w
Y
w
Z
w
]
=
R
x
[
X
w
Y
w
Z
w
]
\begin{bmatrix}X_c\\Y_c\\Z_c\end{bmatrix} = \begin{bmatrix}1&0&0\\0&cos\theta&sin\theta\\0&-sin\theta&cos\theta\end{bmatrix} \begin{bmatrix}X_w\\Y_w\\Z_w\end{bmatrix}=R_x\begin{bmatrix}X_w\\Y_w\\Z_w\end{bmatrix}
⎣⎡XcYcZc⎦⎤=⎣⎡1000cosθ−sinθ0sinθcosθ⎦⎤⎣⎡XwYwZw⎦⎤=Rx⎣⎡XwYwZw⎦⎤
绕
Y
Y
Y轴旋转
θ
\theta
θ度
[
X
c
Y
c
Z
c
]
=
[
c
o
s
θ
0
−
s
i
n
θ
0
1
0
s
i
n
θ
0
c
o
s
θ
]
[
X
w
Y
w
Z
w
]
=
R
y
[
X
w
Y
w
Z
w
]
\begin{bmatrix}X_c\\Y_c\\Z_c\end{bmatrix} = \begin{bmatrix}cos\theta&0&-sin\theta\\0&1&0\\sin\theta&0&cos\theta\end{bmatrix} \begin{bmatrix}X_w\\Y_w\\Z_w\end{bmatrix}=R_y\begin{bmatrix}X_w\\Y_w\\Z_w\end{bmatrix}
⎣⎡XcYcZc⎦⎤=⎣⎡cosθ0sinθ010−sinθ0cosθ⎦⎤⎣⎡XwYwZw⎦⎤=Ry⎣⎡XwYwZw⎦⎤
绕
Z
Z
Z轴旋转
θ
\theta
θ度
[
X
c
Y
c
Z
c
]
=
[
c
o
s
θ
s
i
n
θ
0
−
s
i
n
θ
c
o
s
θ
0
0
0
1
]
[
X
w
Y
w
Z
w
]
=
R
z
[
X
w
Y
w
Z
w
]
\begin{bmatrix}X_c\\Y_c\\Z_c\end{bmatrix} = \begin{bmatrix}cos\theta&sin\theta&0\\-sin\theta&cos\theta&0\\0&0&1\end{bmatrix} \begin{bmatrix}X_w\\Y_w\\Z_w\end{bmatrix}=R_z\begin{bmatrix}X_w\\Y_w\\Z_w\end{bmatrix}
⎣⎡XcYcZc⎦⎤=⎣⎡cosθ−sinθ0sinθcosθ0001⎦⎤⎣⎡XwYwZw⎦⎤=Rz⎣⎡XwYwZw⎦⎤
相机坐标 → 图像坐标系(中心投影)
相机坐标系到图像坐标系是透视关系,利用相似三角形进行计算。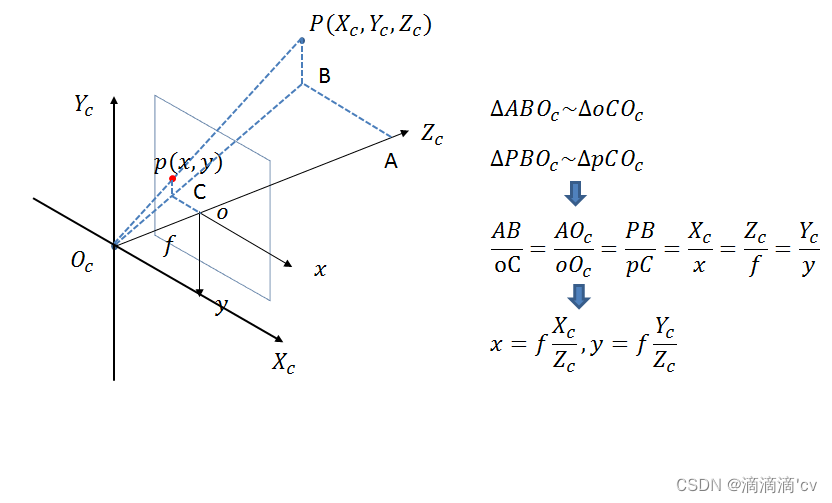
写成齐次坐标形式的矩阵相乘为
Z
c
[
x
y
1
]
=
[
f
0
0
0
0
f
0
0
0
0
1
0
]
[
X
c
Y
c
Z
c
1
]
=
[
K
∣
0
]
[
X
c
Y
c
Z
c
1
]
Zc \begin{bmatrix}x\\y\\1\end{bmatrix} = \begin{bmatrix}f&0&0&0\\0&f&0&0\\0&0&1&0 \end{bmatrix} \begin{bmatrix}X_c\\Y_c\\Z_c\\1\end{bmatrix} = \begin{bmatrix}K|0\end{bmatrix} \begin{bmatrix}X_c\\Y_c\\Z_c\\1\end{bmatrix}
Zc⎣⎡xy1⎦⎤=⎣⎡f000f0001000⎦⎤⎣⎡XcYcZc1⎦⎤=[K∣0]⎣⎡XcYcZc1⎦⎤
其中f代表焦距,即相机坐标系和图像坐标系在Z轴上的差。此时投影点p的单位还是mm,并不是pixel,不方便进行后续运算。
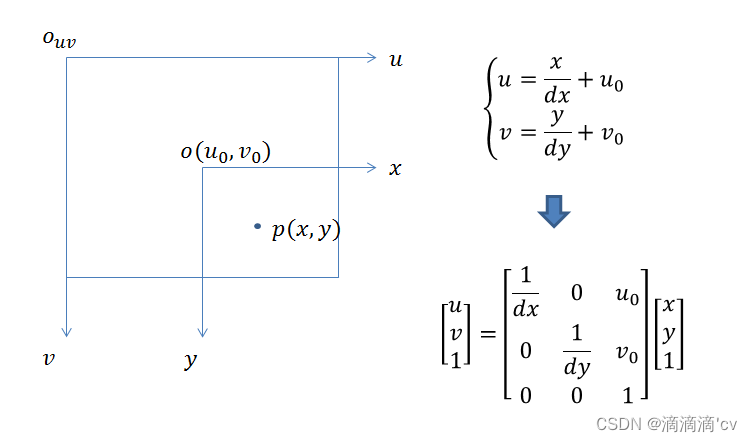
图像坐标系 → 像素坐标系(离散化)
像素坐标系的原点在左上角,并且单位为像素。像素坐标系和图像坐标系都在成像平面上,只是各自的原点和度量单位不一样。图像坐标系的原点为相机光轴与成像平面的交点,通常情况下是成像平面的中点或者叫principal point。图像坐标系的单位是mm,属于物理单位,而像素坐标系的单位是pixel,我们平常描述一个像素点都是几行几列。所以这二者之间的转换如下:其中dx和dy表示每一列和每一行分别代表多少mm,即1pixel=dx mm
Z
c
[
u
v
1
]
=
[
1
d
x
0
u
0
0
1
d
y
v
0
0
0
1
]
[
f
0
0
0
0
f
0
0
0
0
1
0
]
[
R
t
0
1
∗
3
1
]
[
X
w
Y
w
Z
w
1
]
Zc \begin{bmatrix}u\\v\\1\end{bmatrix} = \begin{bmatrix}\frac{1}{d_x}&0&u_0\\0&\frac{1}{d_y}&v_0\\0&0&1 \end{bmatrix} \begin{bmatrix}f&0&0&0\\0&f&0&0\\0&0&1&0 \end{bmatrix} \begin{bmatrix}R & t\\\\ 0_{1*3} & 1 \end{bmatrix} \begin{bmatrix}X_w \\ Y_w \\ Z_w \\ 1 \end{bmatrix}
Zc⎣⎡uv1⎦⎤=⎣⎡dx1000dy10u0v01⎦⎤⎣⎡f000f0001000⎦⎤⎣⎡R01∗3t1⎦⎤⎣⎡XwYwZw1⎦⎤
其中
[
1
d
x
0
u
0
0
1
d
y
v
0
0
0
1
]
[
f
0
0
0
0
f
0
0
0
0
1
0
]
\begin{bmatrix}\frac{1}{d_x}&0&u_0\\0&\frac{1}{d_y}&v_0\\0&0&1 \end{bmatrix} \begin{bmatrix}f&0&0&0\\0&f&0&0\\0&0&1&0 \end{bmatrix}
⎣⎡dx1000dy10u0v01⎦⎤⎣⎡f000f0001000⎦⎤为相机内参矩阵,
[
R
t
0
1
∗
3
1
]
\begin{bmatrix}R & t\\\\ 0_{1*3} & 1 \end{bmatrix}
⎣⎡R01∗3t1⎦⎤为外参矩阵。相机标定就是为了求解这两个矩阵的参数。
版权归原作者 滴滴滴'cv 所有, 如有侵权,请联系我们删除。