
由于疫情已经居家办公2周了,明天就可以正常通勤上班了,内心还有点小小的期待呢。趁着这三月暖暖的春风和屋外喳喳的鸟叫声,咱们来借鉴着大神的文章梳理一下YOLOX算法。如果对YOLO 系列算法还不了解的同学,请先找找相关的文章了解一下也可以看看我前面的这篇:简明扼要理解YOLO v3https://blog.csdn.net/rh8866/article/details/123620540
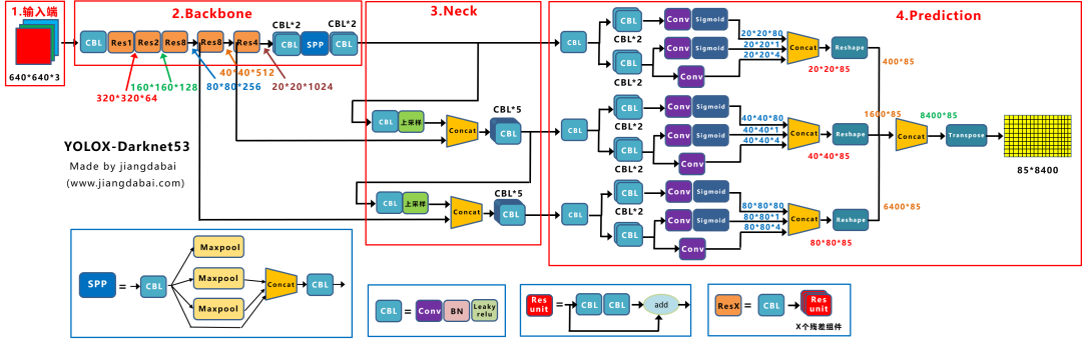
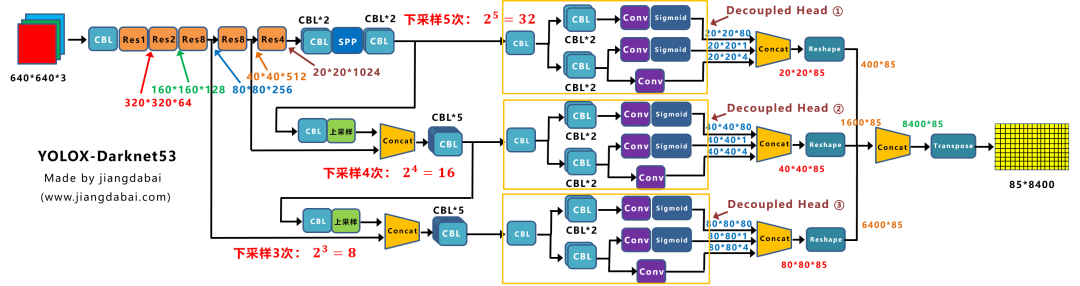
首先来看看YOLOX的网络结构图
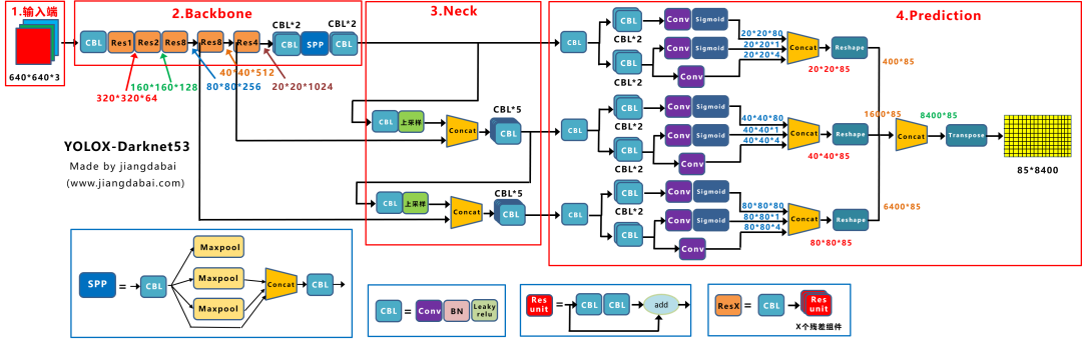
如上图将这个网络分为四个部分:1,输入端;2,Backbone;3,Neck;4 Prediction
输入端
在yolox的输入端采用了 Mosaic、Mixup两种数据增强方式,采用了这两种数据增强,直接将Yolov3 baseline,提升了2.4个百分点;可见数据增强对网络还是很有贡献的。
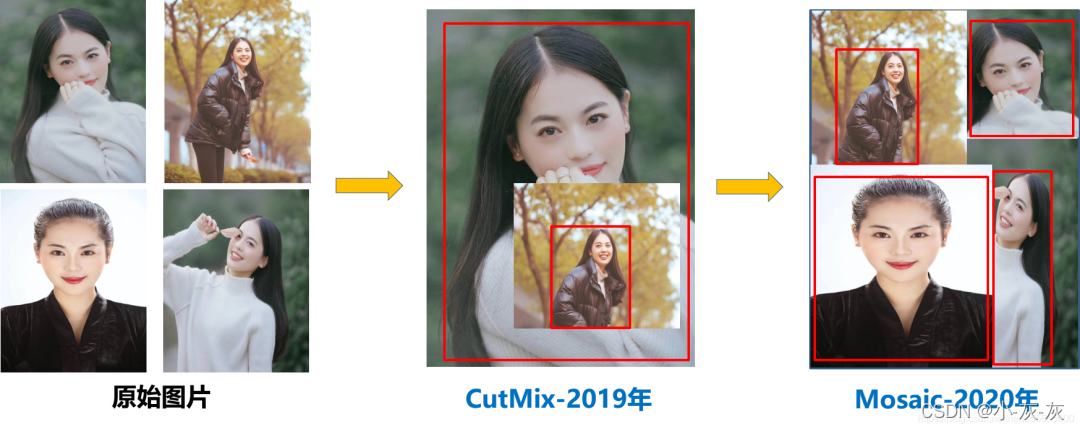
(1) Mosaic数据增强
Mosaic增强的方式,是U版YOLOv3引入的一种非常有效的增强策略。而且在Yolov4、Yolov5算法中,也得到了广泛的应用。通过随机缩放、随机裁剪、随机排布的方式进行拼接,对于小目标的检测效果提升,还是很不错的。在网上找到一个很形象的图示:
(2) MixUp数据增强
MixUp是在Mosaic基础上,增加的一种额外的增强策略。
其实方式很简单,比如我们在做人脸检测的任务。
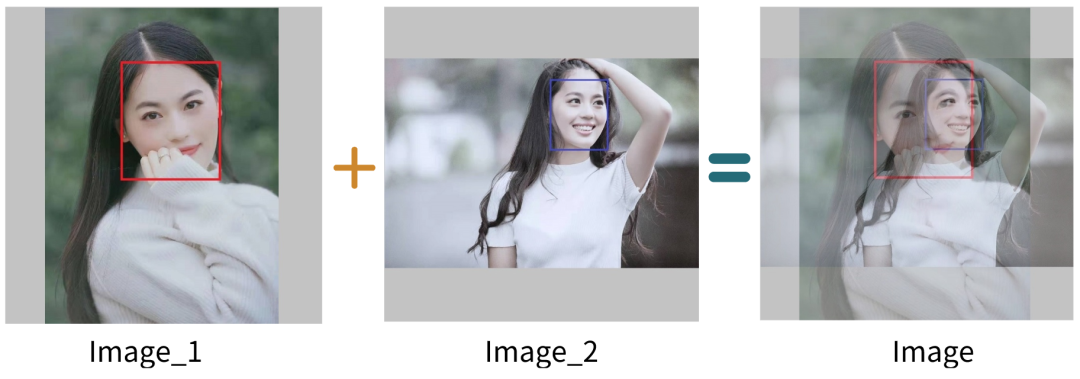
先读取一张图片,图像两侧填充,缩放到640*640大小,即Image_1,人脸检测框为红色框。
再随机选取一张图片,图像上下填充,也缩放到640*640大小,即Image_2,人脸检测框为蓝色框。
然后设置一个融合系数,比如上图中,设置为0.5,将Image_1和Image_2,加权融合,最终得到右面的Image。
从右边得图可以看出,人脸的红色框和蓝色框是叠加存在的。
我们知道,在Mosaic和Mixup的基础上,Yolov3 baseline增加了2.4个百分点。
不过有两点需要知道:
(1)在训练的最后15个epoch,这两个数据增强会被关闭掉。
而在此之前,Mosaic和Mixup数据增强,都是打开的,这个细节需要注意。
(2)由于采取了更强的数据增强方式,作者在研究中发现,ImageNet预训练将毫无意义,因此,所有的模型,均是从头开始训练的。
当然YOLOX 中也可以不使用这两个数据增强,我个人在项目使用中目前还没有使用数据增强这两个功能。
Backbone
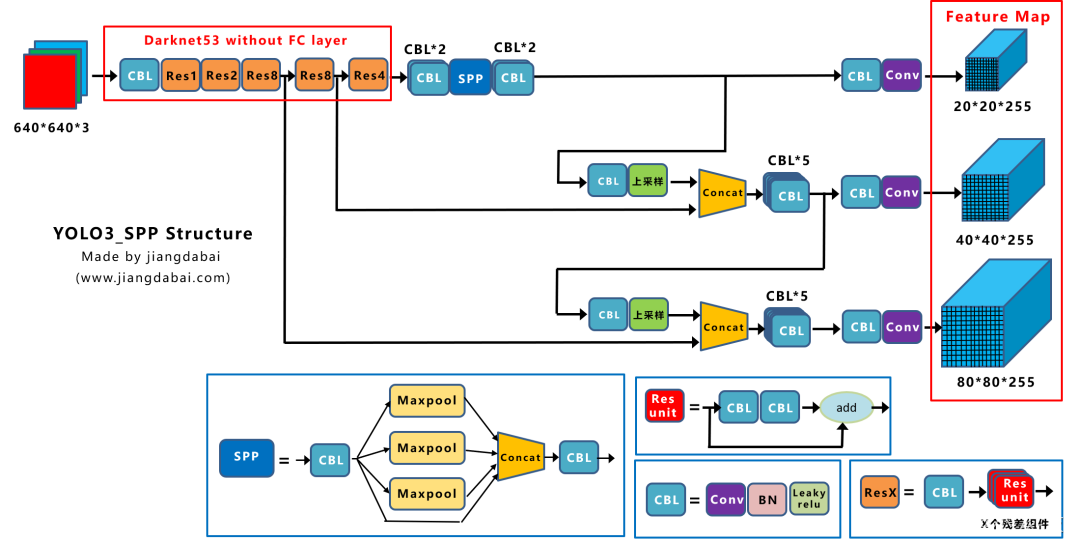
Yolox-Darknet53的Backbone主干网络,和原本的Yolov3 baseline的主干网络都是一样的。都是采用Darknet53的网络结构,
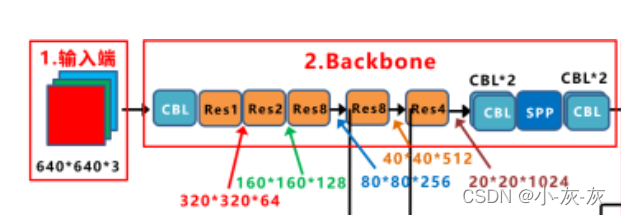
其他得没有要特别说的,这里说一下SPP结构
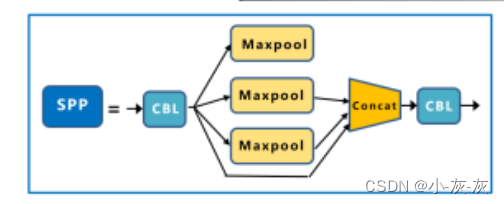
SPP结构通过pooling将不同尺度的特征融合到一起,实现了数据的多尺度输入
Neck
在Neck结构中,Yolox-Darknet53和Yolov3 baseline的Neck结构,也是一样的,都是采用FPN的结构进行融合。
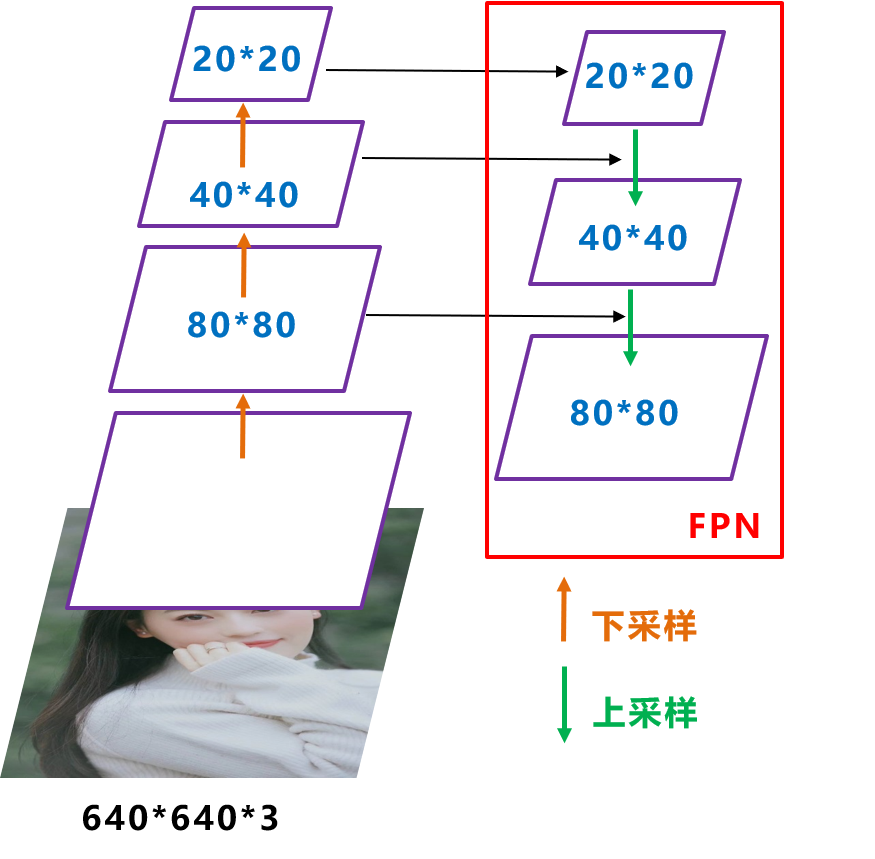
如上图所示,FPN自顶向下,将高层的特征信息通过上采样的方式进行传递融合,得到进行预测的特征图。而在Yolov4、Yolov5、甚至后面的Yolox-s、l等版本中,都是采用FPN+PAN的形式。
Prediction
输出层是我们要着重理解的部分,主要从四个方面进行讲解:Decoupled Head、Anchor Free、标签分配、Loss计算。
(1)Decoupled Head
在Yolox中,作者增加了三个Decoupled Head,俗称“解耦头”
首先为什么要使用解耦头呢,
作者在改进Yolov3 baseline的时候,将Yolov3 baseline 中Yolo Head,也修改为Decoupled Head。发现AP值,从38.5,增加到39.6。
不经如此作者在实验中还发现,不单单是精度上的提高。替换为Decoupled Head后,网络的收敛速度也加快了。
因此可以得到一个非常关键的结论:
目前Yolo系列使用的检测头,表达能力可能有所欠缺,没有Decoupled Head的表达能力更好。
这里看看Yolo Head和Decoupled Head的对比曲线:
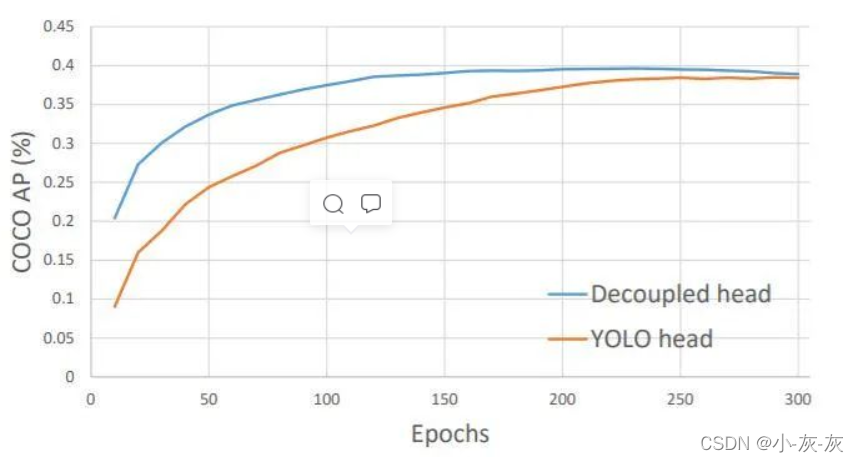
有上图曲线表明:Decoupled Head的收敛速度更快,且精度更高一些。
但是需要注意的是:将检测头解耦,会增加运算的复杂度。
因此作者经过速度和性能上的权衡,最终使用 1个1x1 的卷积先进行降维,并在后面两个分支里各使用了 2个3x3 卷积,最终调整到仅仅增加一点点的网络参数。
而且这里解耦后,还有一个更深层次的重要性:
Yolox的网络架构,可以和很多算法任务,进行一体化结合。
比如:
(1)YOLOX + Yolact/CondInst/SOLO ,实现端侧的实例分割。
(2)YOLOX + 34 层输出,实现端侧人体的 17 个关键点检测。
(2) Decoupled Head的细节
我们取出其中一个检测头看看细节
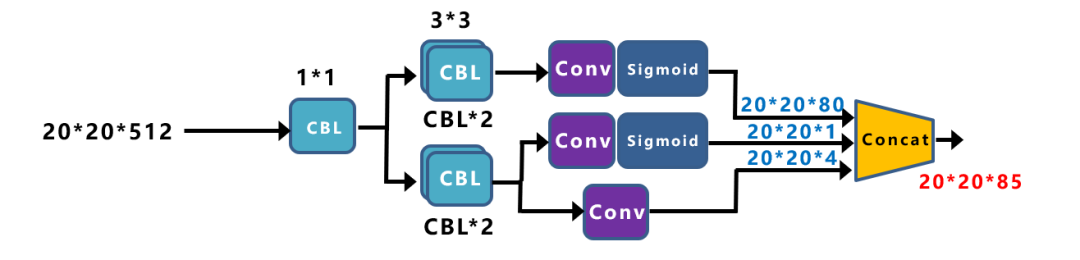
从图上可以看出,Concat前总共有三个分支:
(1)cls_output:主要对目标框的类别,预测分数。因为COCO数据集总共有80个类别,且主要是N个二分类判断,因此经过Sigmoid激活函数处理后,变为202080大小。
(2)obj_output:主要判断目标框是前景还是背景,因此经过Sigmoid处理好,变为20201大小。
(3)reg_output:主要对目标框的坐标信息(x,y,w,h)进行预测,因此大小为20204。
最后三个output,经过Concat融合到一起,得到202085的特征信息。
当然,这只是Decoupled Head①的信息,再对Decoupled Head②和③同样的进行处理
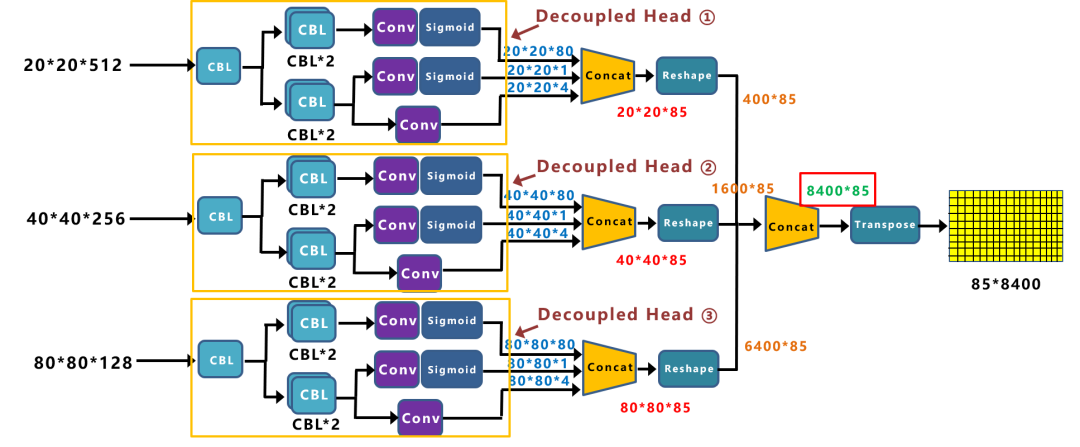
Decoupled Head②输出特征信息,并进行Concate,得到404085特征信息。
Decoupled Head③输出特征信息,并进行Concate,得到808085特征信息。
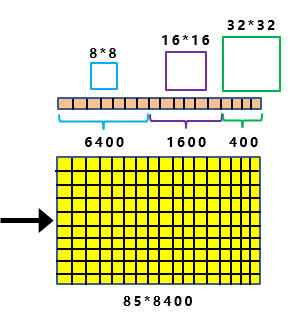
再对①②③三个信息,进行Reshape操作,并进行总体的Concat,得到8400*85的预测信息。
并经过一次Transpose,变为85*8400大小的二维向量信息。
这里的8400,指的是预测框的数量,而85是每个预测框的信息(reg,obj,cls)。
有了预测框的信息,下面我们再了解,如何将这些预测框和标注的框,即groundtruth进行关联,从而计算Loss函数,更新网络参数呢?
(2)Anchor Free
目前行业内,主要有Anchor Based和Anchor Free两种方式。
在Yolov3、Yolov4、Yolov5中,通常都是采用Anchor Based的方式,来提取目标框,进而和标注的groundtruth进行比对,判断两者的差距。
① Anchor Based方式
比如输入图像,经过Backbone、Neck层,最终将特征信息,传送到输出的Feature Map中。
这时,就要设置一些Anchor规则,将预测框和标注框进行关联。从而在训练中,计算两者的差距,即损失函数,再更新网络参数。
比如在下图的,最后的三个Feature Map上,基于每个单元格,都有三个不同尺寸大小的锚框。
以输入图像大小416*416为例:
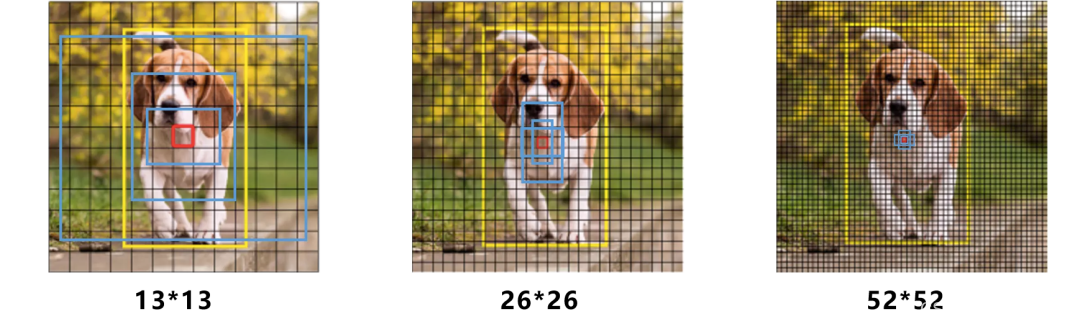
当输入为416416时,网络最后的三个特征图大小分别为1313,2626,5252。
我们可以看到,黄色框为小狗的Groundtruth,即标注框(真值)。
而蓝色的框,为小狗中心点所在的单元格(红框),所对应的锚框,每个单元格都有3个蓝框。
当采用COCO数据集,即有80个类别时。
基于每个锚框,都有x、y、w、h、obj(前景背景)、class(80个类别),共85个参数。
因此会产生3*(1313+2626+5252)85=904995个预测结果。
如果将输入从416416,变为640640,最后的三个特征图大小为2020,4040,80*80。
则会产生3(2020+4040+8080)*85=2142000个预测结果。
② Anchor Free方式
在前面Anchor Based中,每个Feature map的单元格,都有3个大小不一的锚框。
那么Yolox-Darknet53就没有吗?
其实并不然,这里只是巧妙的,将前面Backbone中,下采样的大小信息引入进来。
比如上图中,最上面的分支,下采样了5次,2的5次方为32。
并且Decoupled Head①的输出,为202085大小。
因此如上图所示:
最后8400个预测框中,其中有400个框(2020),所对应锚框的大小,为3232。
同样的原理,中间的分支,最后有1600个预测框(4040),所对应锚框的大小,为1616。
最下面的分支,最后有6400个预测框(8080),所对应锚框的大小,为88。
当有了8400个预测框的信息,每张图片也有标注的目标框的信息。
这时的锚框,就相当于桥梁。
这时需要做的,就是将8400个锚框,和图片上所有的目标框进行关联,挑选出正样本锚框。
而相应的,正样本锚框所对应的位置,就可以将正样本预测框,挑选出来。
这里采用的关联方式,就是标签分配。
(3)标签分配
标签分配这部分我觉得是需要着重讲一下。
当有了8400个Anchor锚框后,这里的每一个锚框,都对应85*8400特征向量中的预测框信息。
不过需要知道,这些预测框只有少部分是正样本,绝大多数是负样本。
那么到底哪些才是正样本呢?
这里需要利用锚框和实际目标框的关系,先挑选出一部分适合的正样本锚框。
比如第3、10、15个锚框是正样本锚框,则对应到网络输出的8400个预测框中,第3、10、15个预测框,就是相应的正样本预测框。
训练过程中,在锚框的基础上,不断的预测,然后不断的迭代,从而更新网络参数,让网络损失越来越小,预测的越来越准。
那么在Yolox中,是如何挑选正样本锚框的呢?
这里就涉及到两个关键点:初步筛选、SimOTA。
① 初步筛选
初步筛选的方式主要有两种:根据中心点来判断、根据目标框来判断;
这部分的代码,在models/yolo_head.py的get_in_boxes_info函数中。
a) 根据中心点来判断:
规则:寻找anchor_box中心点,落在groundtruth_boxes矩形范围的所有anchors。
通过groundtruth的[x_center,y_center,w,h],计算出每张图片的每个groundtruth的左上角、右下角坐标,左上角(gt_l,gt_t),右下角(gt_r,gt_b)。
如下图: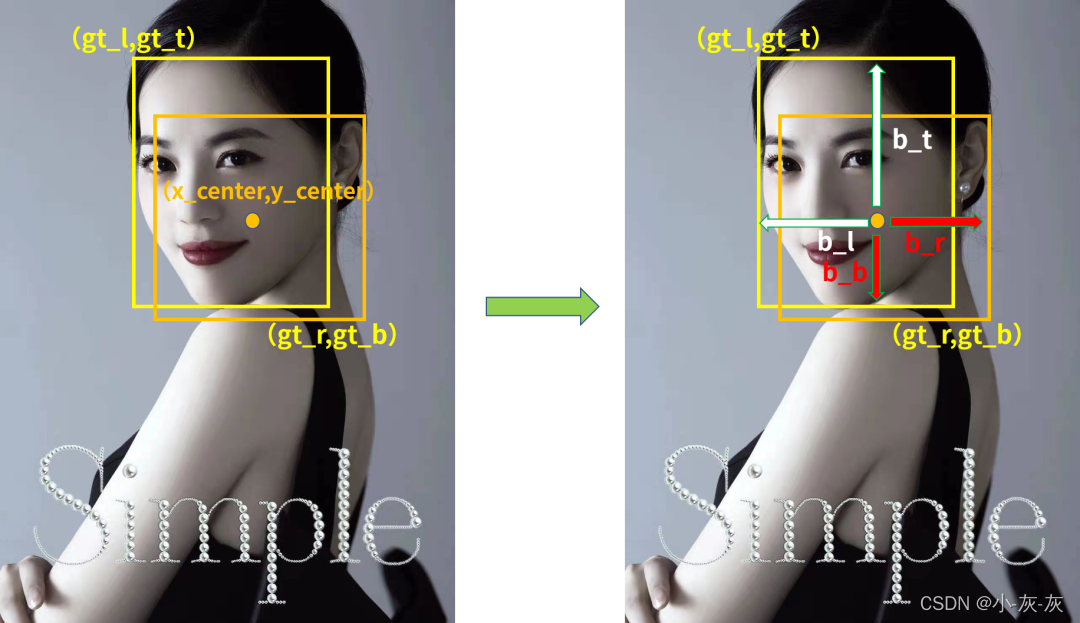
groundtruth的矩形框范围确定了,再根据范围去选择适合的锚框。这里再绘制一个锚框的中心点,(x_center,y_center),*(这里不是groundtruth的(x_center,y_center))*。
而右面的图片,就是寻找锚框和groundtruth的对应关系。
即计算锚框中心点(x_center,y_center),和人脸标注框左上角(gt_l,gt_t),右下角(gt_r,gt_b)两个角点的相应距离。通过计算将中心点落在groundtruth矩形框内的锚框挑选出来。
b)根据目标框来判断:
除了根据锚框中心点,和groundtruth两边距离判断的方式外,作者还设置了根据目标框判断的方法。
规则:以groundtruth中心点为基准,设置边长为5的正方形,挑选在正方形内的所有锚框。
将落中心点落在以groundtruth中心点边长为5的正方形范围内的所有的anchors,都提取出来。
经过上面两种挑选的方式,就完成初步筛选了,挑选出一部分候选的anchor,进入下一步的精细化筛选。
② 精细化筛选
而在精细化筛选中,就用到论文中提到的SimOTA了:
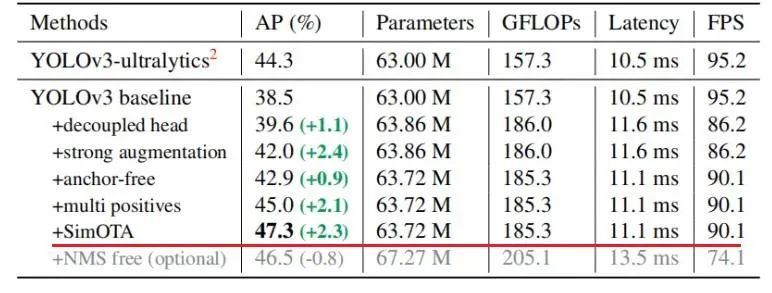
从提升效果上来看,引入SimOTA后,AP值提升了2.3个百分点,还是非常有效的。
我们将SimOTA的前后流程进行拆解,看一下是如何进行精细化筛选的?
(如下部分是yolox之前版本没有使用的,我认为这部分也是YOLOX的精华所在,值得理解透彻)
整个筛选流程,主要分为四个阶段:
a.初筛正样本信息提取
b.Loss函数计算
c.cost成本计算
d.SimOTA求解
接下来为了便于理解,我们假定图片上有3个目标框,即3个groundtruth。
再假定目前在做的项目是对人脸和人体检测,因此检测类别是2。
通过前面介绍,我们知道有8400个锚框,但是经过初步筛选后,假定有1000个锚框是正样本锚框。
a.初筛正样本信息提取
初筛出的1000个正样本锚框的位置,我们是知道的。
而所有锚框的位置,和网络最后输出的85*8400特征向量是一一对应。
所以根据位置,可以将网络预测的候选检测框位置bboxes_preds、前景背景目标分数obj_preds、类别分数cls_preds等信息,提取出来。
以前面的假定信息为例,
bboxes_preds是候选检测框的信息,因此维度为[1000,4]。
obj_preds因为是目标分数,所以维度是[1000,1]。
cls_preds因为是类别分数,所以维度是[1000,2]。
b.Loss函数计算
针对筛选出的1000个候选检测框,和3个groundtruth计算Loss函数。
可以计算出3个目标框,和1000个候选框,每个框相互之间的iou信息,再通过-torch.log计算,得到位置损失;
将类别的条件概率和目标的先验概率做乘积,得到目标的类别分数。
再通过F.binary_cross_entroy的处理,得到3个目标框和1000个候选框的综合loss值。
c.cost成本计算
有了reg_loss和cls_loss,就可以将两个损失函数加权相加,计算cost成本函数了。
这里涉及到论文中提到的一个公式:
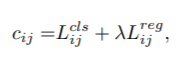
相应的,对应于yolo_head.py的get_assignments函数中的代码:
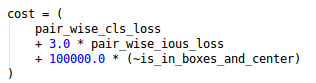
可以看出,公式中的加权系数,即代码中的3.0
**d.SimOTA **
有了上面的一系列信息,标签分配问题,就转换为了标准的OTA问题。
但是经典的Sinkhorn-Knopp算法,需要多次迭代求得最优解。
作者也提到,该算法会导致25%额外训练时间,所以采用一种简化版的SimOTA方法,求解近似最优解。这里对应的函数,是get_assignments函数中的self.dynamic_k_matching:

其中的流程如下:
第一步:设置候选框数量


首先按照cost值的大小,新建一个全0变量matching_matrix,这里是[3,1000]。

通过上面第二行代码,设置候选框数量为10。
再通过第三行代码,从前面的pair_wise_ious中,给每个目标框,挑选10个iou最大的候选框。
因为前面假定有3个目标,因此这里topk_ious的维度为[3,10]。
第二步:通过cost挑选候选框
下面再通过topk_ious的信息,动态选择候选框,这里是个关键。
代码如dynamic_k_matching函数中,下图所示:

为了便于大家理解,大白先把第一行制作成图示效果。
这里的topk_ious,是3个目标框和预测框中,最大iou的10个候选框:
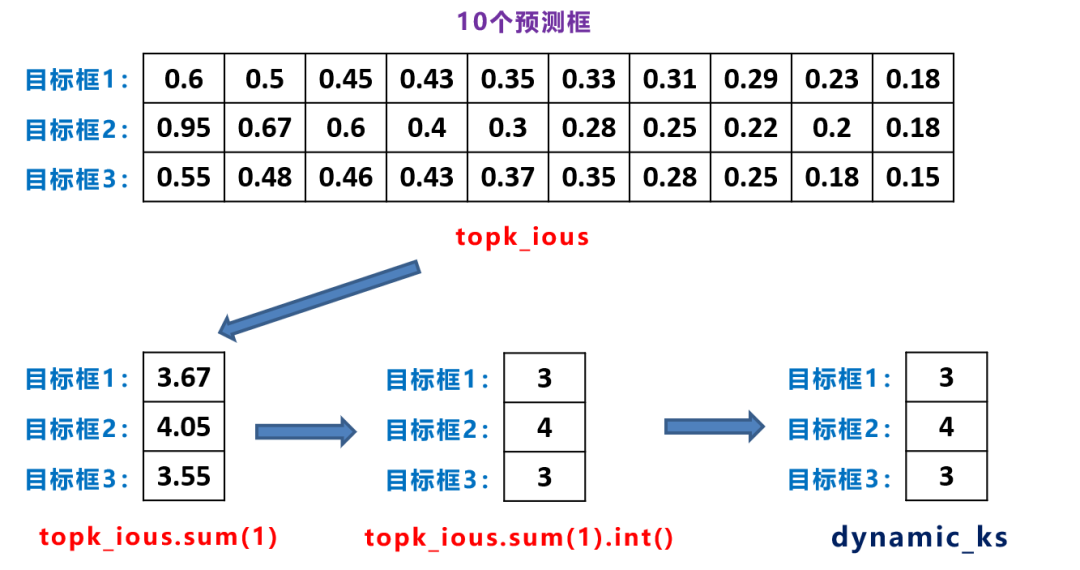
经过torch.clamp函数,得到最终右面的dynamic_ks值。
我们就知道,目标框1和3,给他分配3个候选框,而目标框2,给它分配4个候选框。
那么基于什么标准分配呢?
这时就要利用前面计算的cost值,即[3,1000]的损失函数加权信息。
在for循环中,针对每个目标框挑选相应的cost值最低的一些候选框。
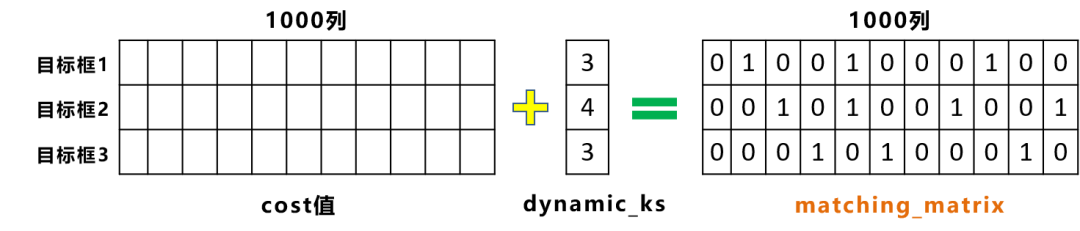
比如右面的matching_matrix中,cost值最低的一些位置,数值为1,其余位置都为0。
因为目标框1和3,dynamic_ks值都为3,因此matching_matrix的第一行和第三行,有3个1。
而目标框2,dynamic_ks值为4,因此matching_matrix的第二行,有4个1。
第三步:过滤共用的候选框
不过在分析matching_matrix时,我们发现,第5列有两个1。
这也就说明,第五列所对应的候选框,被目标检测框1和2,都进行关联(一个锚框只能检测一个目标)。
因此对这两个位置,还要使用cost值进行对比,选择cost较小的值,再进一步筛选。

这里为了便于理解,还是采用图示的方式:
首先第一行代码,将matching_matrix,对每一列进行相加。
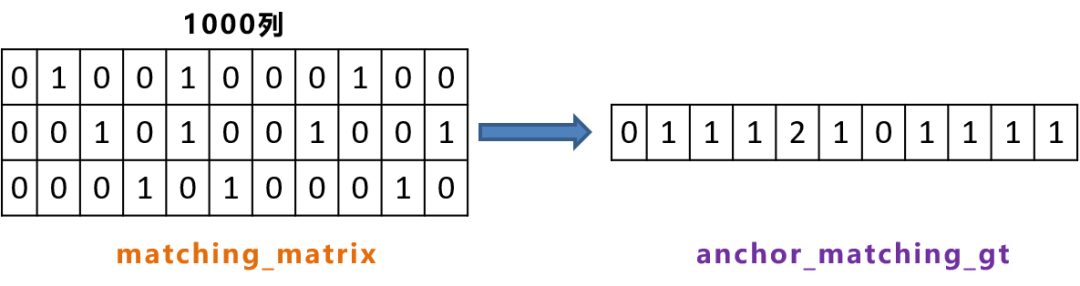
这时anchor_matching_gt中,只要有大于1的,说明有共用的情况。
上图案例中,表明第5列存在共用的情况。
再利用第三行代码,将cost中,第5列的值取出,并进行比较,计算最小值所对应的行数,以及分数。
我们将第5列两个位置,假设为0.4和0.3。

经过第三行代码,可以找到最小的值是0.3,即cost_min为0.3,所对应的行数,cost_argmin为2。

经过第四行代码,将matching_matrix第5列都置0。
再利用第五行代码,将matching_matrix第2行,第5列的位置变为1。
最终我们可以得到3个目标框,最合适的一些候选框,即matching_matrix中,所有1所对应的位置。
(4)Loss计算
经过第三部分的标签分配,就可以将目标框和正样本预测框对应起来了。
下面就可以计算两者的误差,即Loss函数。
计算的代码,位于yolo_head.py的get_losses函数中。

我们可以看到:
检测框位置的iou_loss,Yolox中使用传统的iou_loss,和giou_loss两种,可以进行选择。
而obj_loss和cls_loss,都是采用BCE_loss的方式。
当然除此之外,还有两点需要注意:
a.在前面精细化筛选中,使用了reg_loss和cls_loss,筛选出和目标框所对应的预测框。
因此这里的iou_loss和cls_loss,只针对目标框和筛选出的正样本预测框进行计算。
而obj_loss,则还是针对8400个预测框。
b.在Decoupled Head中,cls_output和obj_output使用了sigmoid函数进行归一化,
但是在训练时,并没有使用sigmoid函数,原因是训练时用的nn.BCEWithLogitsLoss函数,已经包含了sigmoid操作。

而在推理过程中,是使用Sigmoid函数的。

以上便是对YOLOX的重点部分的说明,当然也是踩巨人肩膀上完成的,文中的图示很多都是从其他地方拿过来的。以上文中如有错误的部分或者没有说明白的欢迎留言一起交流。
版权归原作者 小-灰-灰 所有, 如有侵权,请联系我们删除。