
协作机器人(Collaborative-Robot)的安全碰撞速度和接触力是一个非常重要的安全指标。在设计和使用协作机器人时,必须确保其与人类或其他物体的碰撞不会对人员造成伤害。
对于协作机器人的安全碰撞速度,一般会设定一个上限值,以确保机器人在与人类或其他物体发生碰撞时不会对人员造成伤害。这个速度上限值通常是根据机器人的最大速度、加速度以及碰撞后的能量损失等因素进行确定的。
对于接触力标准,协作机器人通常会设定一个最大允许接触力,以确保机器人在与人类或其他物体接触时不会对人员造成伤害。这个最大允许接触力通常是根据机器人的设计、材料以及碰撞后的能量损失等因素进行确定的。
协作机器人安全碰撞速度与接触力的国际标准是由ISO/TS 15066标准规定的。
ISO/TS 15066标准规定了协作机器人与人体接触力的安全限制,并为工业界提供了设计和评估协作机器人的参考指南,以保障人机协同工作的安全性。

UR5机器人,其关节位置重复定位精度达到0.03mm,可在±360度范围内旋转,最大可达180度/秒的关节速度。

ISO15066 协作机器人设计标准https://www.baidu.com/link?url=7-VSXt_A5T7H4AuVhdZGrB7RhjwemcJnw5MMN0qfqw2BbY2m8teB4ri4twQLgFyZs71WA3K5LPLaSoTBuK6oEq&wd=&eqid=a091ad030038c6ae0000000265828eb8
ISO15066 协作机器人设计标准 - 道客巴巴https://www.doc88.com/p-85729729066806.html协作机器人的主要技术指标https://www.sohu.com/a/167177806_650377
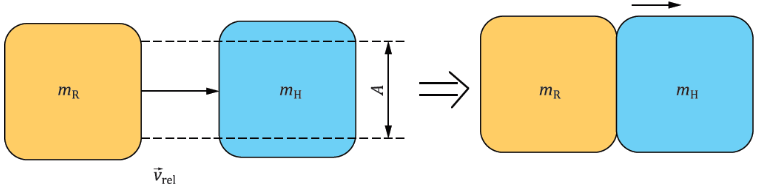
由于涉及到碰撞,因此我们需要一个碰撞模型。在ISO 15066中把机器人和人员之间的碰撞用一个简化的非弹性碰撞模型来描述。
协作机器人安全评测方法——功率与力限制关注!https://mp.weixin.qq.com/s?__biz=MzIzNjI1Mjc0MA==&mid=2651728409&idx=1&sn=b1e519aea983e8a58e66fe5f81c84f7a&chksm=f3203132c457b8243f0a9ce74c707329770302a50d835e4fd1517ba048f0b1556e44dc1b4ab3&scene=27让机器人更安全(四)-机器人的碰撞标准 - 技术天地 - 产业资讯 -AGV产业联盟官方网站 -新战略机器人网-工业、服务、AGV机器人产业资讯传播者新战略•机器人网(www.xzlrobot.com)是机器人行业极具权威性和影响力的专业机器人财经门户网站。是一家只做原创的网站。专注于机器人产业的咨询传播和产品价值的创造。坚持专业、权威、实用的媒体理念,新闻锐利、眼光独到、原创独家的产业财经新闻。致力于推动国内机器人产业的变革,规范公司产业运行,维护广大消费者(投资者)的权益。以中国经济制度变革推动者和财经新秩序建设者的身份忠实记录中国机器人行业社会的发展历程,立志成为中国机器人市场的守望者和广大投资者的代言人。http://www.xzlrobot.com/c5325.html
让机器人更安全(四) - 机器人的“碰撞标准” - 知乎机器人也需要碰撞标准?当我们评价一款车的安全性时,经常会以碰撞测试成绩作为一个主要的参考项。始于1997年的NCAP为提升汽车的被动安全性做出了巨大贡献,在此之前,由于没有明确的汽车安全设计和测试标准,导致…https://zhuanlan.zhihu.com/p/22193691?refer=onionbots
版权归原作者 FL17171314 所有, 如有侵权,请联系我们删除。