
《Python计算机视觉编程》
文章目录
前言
计算机视觉是一门对图像中信息进行自动提取的学科。
计算机视觉有时试图模拟人类视觉,有时使用数据和统计方法,而有时几何是解决问题的关键。
第 1 章 基本的图像操作和处理
引言
1.1 PIL: Python图像处理类库
PIL( Python Imaging Library Python,图像处理类库)提供了通用的图像处理功能,以及大量有用的基本图像操作。
图像读取、显示、显示对应灰度图
from PIL import Image
from time import*defmain():# 读取一幅图像
pil_im = Image.open('empire.jpg')# 读取一幅图像,并将其转换成灰度图像,
pil_imL = Image.open('empire.jpg').convert('L')
pil_im.show()
pil_imL.show()returnif __name__ =='__main__':
timeStart = time()
main()
timeOver = time()print("program running time is :",timeOver - timeStart)
原图如下:
程序运行后输出结果如下:
一张为正常彩色图片,一张为转换后的灰度图片。
我使用的Python版本为3.8所以书中的代码没法直接使用,需要调整一下。
更改图像格式(后缀)
defchangeFormat():"""
函数功能:修改图像格式
参数说明:无
函数返回:无
"""
filelist = get_imlist(r"D:\python\exercise_data\ComputerVision\ch01\figure")# 遍历整个文件夹查找出路径中符合条件的图像文件for infile in filelist:# 对原图像文件的格式进行修改
outfile = os.path.splitext(infile)[0]+'.png'# 判断是否修改成功,成功则进行save()方法if infile !=outfile:try:
Image.open(infile).save(outfile)except IOError:print("cannot convert",infile)returndefmain():# readAndShow()
changeFormat()returnif __name__ =='__main__':
timeStart = time()
main()
timeOver = time()print("program running time is :",timeOver - timeStart)
程序实际上是将图片读取,然后修改名称后缀,之后保存。
创建缩略图
defthumbnail():"""
函数功能:生成缩略图
参数说明:无
函数返回:无
"""
op_image = Image.open(r'./figure/empire.jpg')
plt.subplot(121)
plt.imshow(op_image)
plt.title("original")# 输出原图
op_image.thumbnail((128,128))#图像缩略处理,指定大小为128*128
plt.subplot(122)
plt.imshow(op_image)
plt.title("result")
plt.show()return
输出如下:
对比上图,不难发现缩略后的图片看起来比较模糊,而且坐标尺寸也小于原图。
复制和粘贴图像区域
defcopyAndPaste(op_image):"""
函数功能:复制粘贴一幅图片中的部分内容
参数说明:op_image__已打开的图片
函数返回:无
"""
box =(50,50,200,200)# 元组给出裁剪区域
re_img = op_image.crop(box)# 利用crop方法进行图片裁剪
axes = subplot(121)
imshow(op_image), title("original")
subplot(122)
imshow(re_img), title("result")
show()returndefmain():
op_image = Image.open(r'./figure/empire.jpg')# readAndShow()# changeFormat()# thumbnail()
copyAndPaste(op_image)return
上图可以看到输出结果为原图的部分,对比坐标就是 (50, 50,200, 200) 四条线包围的部分。
调整尺寸和旋转
defadjustAndRotate(or_image):"""
函数功能:调整图片尺寸和旋转
参数说明:or_image__已打开的图片
函数返回:无
"""
size =(128,128)# resize()用以调整图片的大小,参数为元组
out_image1 = or_image.resize(size)# rotate()用以对图像进行旋转,参数为(0-360)
out_image2 = or_image.rotate(180)
subplot(131)
imshow(or_image), title('original')
subplot(132)
imshow(out_image1), title('resize')
subplot(133)
imshow(out_image2), title('rotate')
show()return
上图分别展示的是原图、调整了尺寸的图像,可以看到坐标有差异。最后是将图片旋转了90度后的图片。
1.2 Matplotlib
Matplotlib是个很好的类库,具有比 PIL 更强大的绘图功能。
绘制图像、 点和线
defplotPointAndLine(or_image):"""
函数功能:在绘制的图片上绘制线
参数说明:or_image__已打开的图片
函数返回:无
"""# 将图像转换为数组
img = array(or_image)
imshow(img)
x =[10,50,100,200]
y =[20,50,150,180]# 根据给出的坐标绘制红色点
plot(x, y,"r*")# 绘制连接4个点的线
plot(x[:4], y[:4])
title('plotting')
show()return
如上图所示,底图是“蛋生”,蛋生上的线条就是我们绘制的线条。
加了坐标轴看起来可能不舒服,我们就使用 axis(‘off’)来关闭坐标轴。
# 将图像转换为数组
img = array(or_image)
imshow(img)
x =[10,50,100,200]
y =[20,50,150,180]# 根据给出的坐标绘制红色点
plot(x, y,"r*")# 绘制连接4个点的线
plot(x[:4], y[:4])
title('plotting')
axis('off')
show()
使用还是之前的代码,增加一行就可以。输出结果如下:
此时照片就不含有坐标轴。
图像轮廓和直方图
defoutlineAndHistogram(fileName):"""
函数功能:绘制图像轮廓和直方图
参数说明:fileName__图像存储路径
函数返回:无
"""# 读取图像至数组中,并将其转为灰度图像
im = array(Image.open(fileName).convert('L'))
re_im = Image.open(fileName)
subplot(131)
imshow(re_im), title('original')
subplot(132)
gray()# 不使用颜色信息
contour(im, origin='image')# 在原点的左上角显示轮廓图像
axis('off')
axis('equal')
subplot(133)# 直方图绘制# flatten() 方法将任意数组按照行优先准则转换成一维数组。
hist(im.flatten(),128)
show()return
输出如下: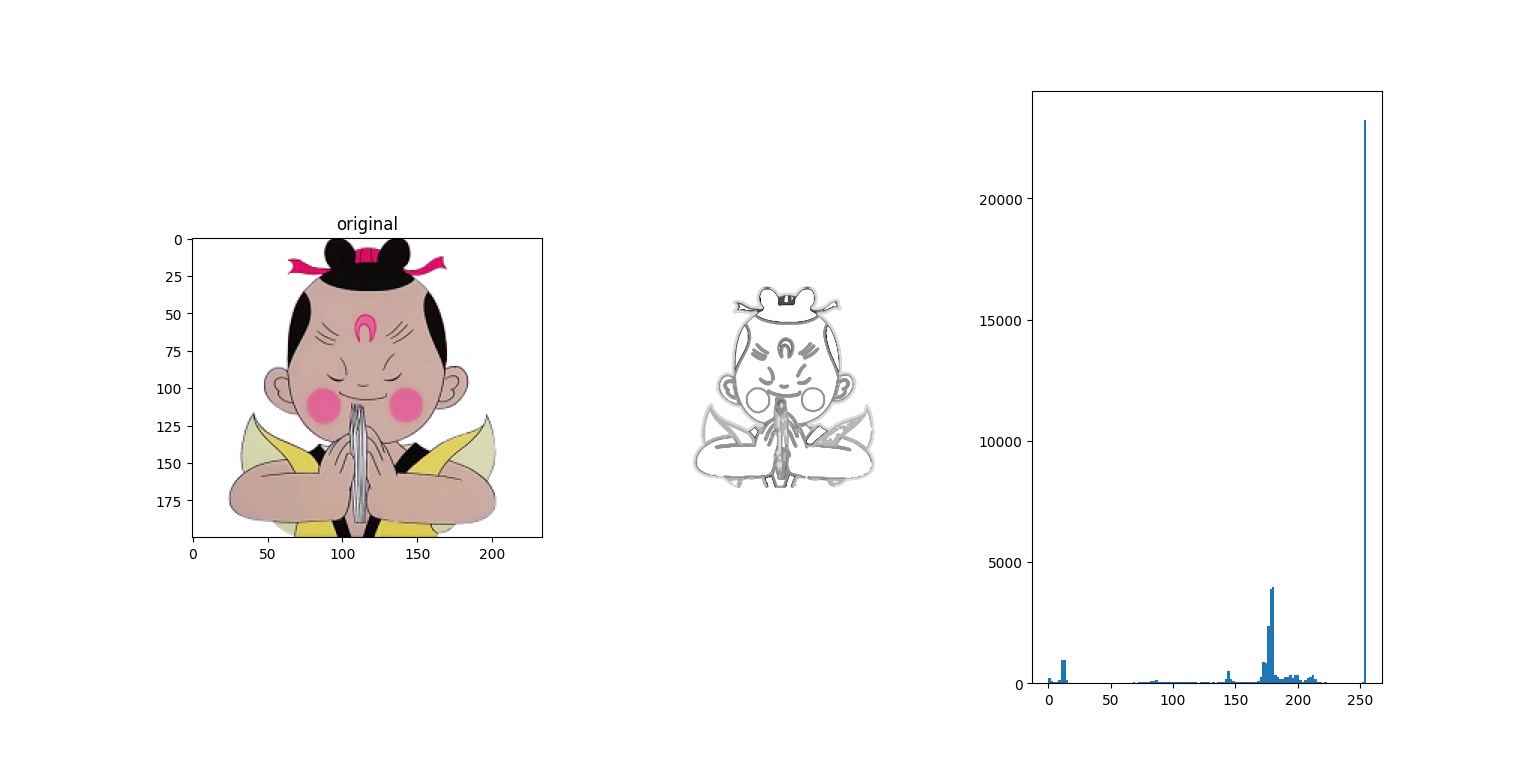
最左侧的是原图,中间的是原图对应的轮廓线,我们可以清晰的看到。最右侧的是图像对饮过得直方图的统计。可以大致得到图像灰度值的分部。
交互式标注
defmarkPoint(fileName):"""
函数功能:给出点击点的坐标
参数说明:fileName__图像存储路径
函数返回:无
"""
im = array(Image.open(fileName))
imshow(im)while(True):print("please click 3 points")
x = ginput(3)print("you click:", x)
matData = mat(x)# 这里取得是列所以要转
axis_x = matData[:,0]
axis_y = matData[:,1]# [item[i] for item in a]
plot(axis_x.flatten(), axis_y.flatten(),"o")# 三个点的横坐标过近时,就退出
pointDistance = axis_x[0][0]-axis_x[1][0]+axis_x[2][0]-axis_x[1][0]if pointDistance <100:print('quit :',pointDistance)break
show()return
输出结果如下:
图像上三个桔绿蓝的点是我们点点击的位置,程序输出的位置为:
[(74.50865800865802,69.19696969696969),(142.04112554112555,95.17099567099567),(83.59956709956711,121.57792207792207)]
目测一下坐标是对的上的。
1.3 NumPy
Numpy是非常有名的 Python 科学计算工具包,其中包含了大量有用的思想,比如数组对象(用来表示向量、矩阵、图像等)以及线性代数函数。
图像数组表示
defimageArray(fileName):"""
函数功能:图像数组表示
参数说明:fileName__图像存储路径
函数返回:无
"""
img0 = array(Image.open(fileName))print(img0.shape, img0.dtype)
img = array(Image.open(fileName).convert('RGB'))# RGBprint(img.shape, img.dtype)
img1 = array(Image.open(fileName).convert('1'))# 二值图像非0即1,故数据类型为bool型print(img1.shape, img1.dtype)
img2 = array(Image.open(fileName).convert('L'))# 灰度图,灰度值在0-255之间,且为设定其数据类型,array自动判定为uint8型print(img2.shape, img2.dtype)
img3 = array(Image.open(fileName).convert('L'),'f')# 灰度图,‘f’设定其数据类型为float类型,故显示为float32print(img3.shape, img3.dtype)return
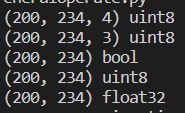
输出与注释一致。就是将图片信息按照我们的要求读取出来后,存储到一个数组中,彩色图像是三维数组,因为包含RGB三色。灰度图像就是二维数组。每一个点代表图像中的每一个像素点。所以我们访问图片数组就是在访问每一个像素点。
灰度变换
defgrayChange(fileName):"""
函数功能:图像灰度变换
参数说明:fileName__图像存储路径
函数返回:无
"""
or_img = array(Image.open(fileName))# 灰度变换
gr_img = array(Image.open(fileName).convert('L'))# 对灰度图进行反相处理
gr_img1 =255- gr_img
# 将图像的像素转变到100-200区间
gr_img2 =(100.0/255)* gr_img +100# 将灰度图像的像素求平方
gr_img3 =255.0*(gr_img/255.0)**2
subplot(231)
imshow(or_img), title('origin')
subplot(232)
gray()
imshow(gr_img), title('gray')
subplot(233)
gray()
imshow(gr_img1), title('gray_re')
subplot(234)
gray()
imshow(gr_img2), title('gray(100-200)')
subplot(235)
imshow(gr_img3), title('gray**2')
show()return
输出如下: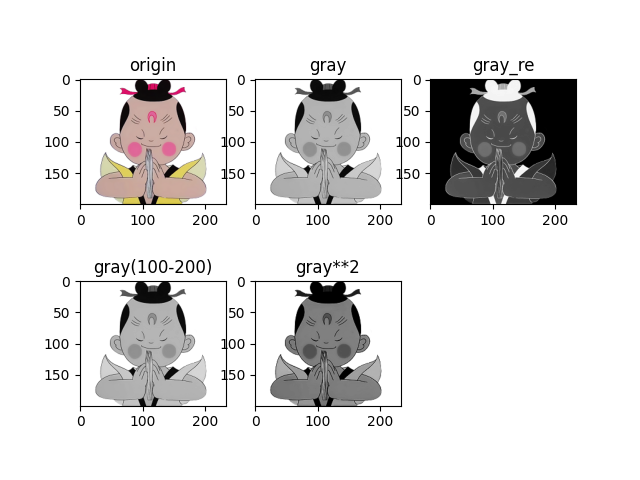
如上图所示,展示的为从原图变换后得到的各种灰度图。按从左往右,从上往下的顺序,原图之后是灰度图,直接调用程序中的转换函数得到。接下来是反相,可以看到在灰度图中暗的部分现在变成了亮色,而原本亮的地方这里变成了黑色。接下来是对灰度值进行了一个归一化,变化到100-200范围内,可以发现图片的对比度有了提升,原本暗的地方更暗,亮的地方也更亮。最后一个是对灰度值进行了平方操作,整体图像更加偏暗了。
直方图均衡化
直方图均衡化是指将一幅图像的灰度直方图变平,使变换后的图像中每个灰度值的分布概率都相同。在对图像做进一步处理之前,直方图均衡化通常是对图像灰度值进行归一化的一个非常好的方法,并且可以增强图像的对比度。之前的灰度变换中将灰度值变到100-200就能看到。
直方图均衡化的变换函数是图像中像素值的累积分布函数( cumulative distribution function, 简写为 cdf,将像素值的范围映射到目标范围的归一化操作)。
defhistequal(fileName):"""
函数功能:直方图均衡化
参数说明:fileName__图像存储路径
函数返回:无
"""
img = array(Image.open(fileName).convert('L'))
img2, cdf = histeq(img)
subplot(231)
hist(img.flatten(),128)
subplot(234)
gray()
imshow(img), title('gray')
subplot(233)
hist(img2.flatten(),128)
subplot(232)
gray()
plot(cdf,'b-')
subplot(236)
gray()
imshow(img2), title('gray_ch')
show()return
输出如下: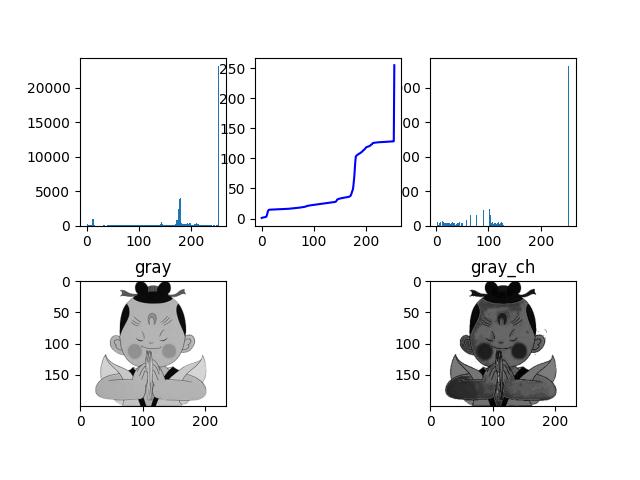
左侧为原始图像和直方图,中间图为灰度变换函数,右侧为直方图均衡化后的图像和相应直方图。明显差异就是均衡过后的图像对比度变大。
图像平均操作是减少图像噪声的一种简单方式,通常用于艺术特效。
图像的主成分分析( PCA)
PCA( Principal Component Analysis,主成分分析)是一个非常有用的降维技巧。它可以在使用尽可能少维数的前提下,尽量多地保持训练数据的信息
这部分可以参考《机器学习实战》利用PCA来简化数据这里面有PCA更详细的说明。区别在于我们现在在分析图片,而里面是对于矩阵的处理。
1.4 SciPy
SciPy是建立在 NumPy 基础上,用于数值运算的开源工具包。SciPy 提供很多高效的操作,可以实现数值积分、优化、统计、信号处理,以及对我们来说最重要的图像处理功能。
图像模糊
图像的高斯模糊是非常经典的图像卷积例子。本质上,图像模糊就是将(灰度)图像 I 和一个高斯核进行卷积操作:
其中 * 表示卷积操作; Gσ 是标准差为 σ 的二维高斯核,定义为 :
I
σ
=
I
∗
G
σ
\boldsymbol{I}_{\sigma}=\boldsymbol{I} * G_{\sigma}
Iσ=I∗Gσ
其中 * 表示卷积操作;
G
σ
G_σ
Gσ 是标准差为 σ 的二维高斯核,定义为 :
G
σ
=
1
2
π
σ
e
−
(
x
2
+
y
2
)
/
2
σ
2
G_{\sigma}=\frac{1}{2 \pi \sigma} \mathrm{e}^{-\left(x^{2}+y^{2}\right) / 2 \sigma^{2}}
Gσ=2πσ1e−(x2+y2)/2σ2
defdimImage(fileName):"""
函数功能:直方图均衡化
参数说明:fileName__图像存储路径
函数返回:无
"""# 灰度图像的模糊处理
img = array(Image.open(fileName).convert('L'))
img_re0 = filters.gaussian_filter(img,2)
img_re1 = filters.gaussian_filter(img,5)
img_re2 = filters.gaussian_filter(img,10)# 彩色图像的模糊处理
img_or = array(Image.open(fileName))
img_or2 = zeros(img_or.shape)# guassian_filter() 函数的最后一个参数表示标准差
img_or2= filters.gaussian_filter(img_or,1)
img_or2 = uint8(img_or2)
subplot(231)
imshow(img_or), title('original')
subplot(233)
imshow(img_or2), title('rgb——1')
subplot(234)
gray()
imshow(img_re1), title('gray——2')
subplot(235)
gray()
imshow(img_re2), title('gray——5')
subplot(236)
gray()
imshow(img_re2), title('gray——10')
show()
输出如下: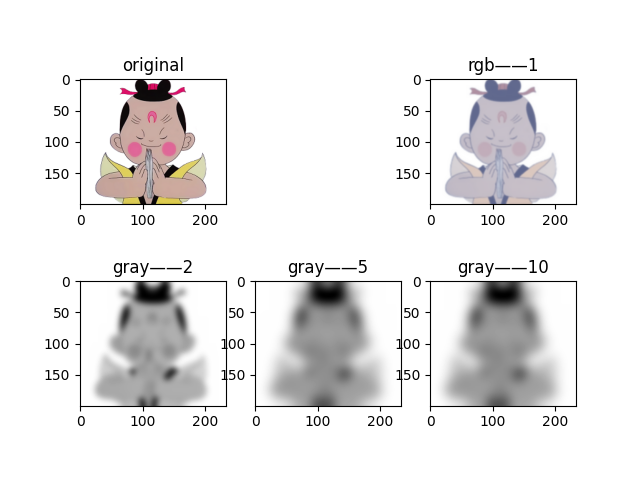
从上图可知随着 σ 的增加,一幅图像被模糊的程度越大。σ越大,处理后的图像细节丢失越多。
图像导数
在很多应用中图像强度的变化情况是非常重要的信息。强度的变化可以用灰度图像
I
I
I(对于彩色图像,通常对每个颜色通道分别计算导数)的x和y方向导数
I
x
I_x
Ix和
I
y
I_y
Iy进行描述。图像的梯度向量为
∇
I
=
[
I
x
,
I
y
]
T
\nabla \boldsymbol{I}=\left[\boldsymbol{I}_{x}, \boldsymbol{I}_{y}\right]^{T}
∇I=[Ix,Iy]T。梯度有两个重要的属性,一是梯度的大小:
∣
∇
I
∣
=
I
x
2
+
I
y
2
|\nabla \boldsymbol{I}|=\sqrt{\boldsymbol{I}_{x}^{2}+\boldsymbol{I}_{y}^{2}}
∣∇I∣=Ix2+Iy2它描述了图像强度变化的强弱,一是梯度的角度:
α
=
arctan
2
(
I
y
,
I
x
)
\alpha=\arctan 2\left(\boldsymbol{I}_{y}, \boldsymbol{I}_{x}\right)
α=arctan2(Iy,Ix)
描述了图像中在每个点(像素)上强度变化最大的方向。
我们可以用离散近似的方式来计算图像的导数。图像导数大多数可以通过卷积简单地实现:
I
x
=
I
∗
D
x
和
I
y
=
I
∗
D
y
\boldsymbol{I}_{x}=\boldsymbol{I} * D_{x} \text { 和 } \boldsymbol{I}_{y}=\boldsymbol{I} * D_{y}
Ix=I∗Dx 和 Iy=I∗Dy
对于
D
x
D_x
Dx和
D
y
D_y
Dy ,通常选择 Prewitt 滤波器:
D
x
=
[
−
1
0
1
−
1
0
1
−
1
0
1
]
和
D
y
=
[
−
1
−
1
−
1
0
0
0
1
1
1
]
D_{x}=\left[\begin{array}{lll} -1 & 0 & 1 \\ -1 & 0 & 1 \\ -1 & 0 & 1 \end{array}\right] \text { 和 } D_{y}=\left[\begin{array}{rrr} -1 & -1 & -1 \\ 0 & 0 & 0 \\ 1 & 1 & 1 \end{array}\right]
Dx=⎣⎡−1−1−1000111⎦⎤ 和 Dy=⎣⎡−101−101−101⎦⎤
或者 Sobel 滤波器:
D
x
=
[
−
1
0
1
−
2
0
2
−
1
0
1
]
和
D
y
=
[
−
1
−
2
−
1
0
0
0
1
2
1
]
D_{x}=\left[\begin{array}{lll} -1 & 0 & 1 \\ -2 & 0 & 2 \\ -1 & 0 & 1 \end{array}\right] \text { 和 } D_{y}=\left[\begin{array}{ccc} -1 & -2 & -1 \\ 0 & 0 & 0 \\ 1 & 2 & 1 \end{array}\right]
Dx=⎣⎡−1−2−1000121⎦⎤ 和 Dy=⎣⎡−101−202−101⎦⎤
defrepresentativeFilters(fileName):"""
函数功能:典型滤波
参数说明:fileName__图像存储路径
函数返回:无
"""
img = array(Image.open(fileName).convert('L'))# Sobel滤波器
img_x = zeros(img.shape)# sobel() 函数的第二个参数表示选择 x 或者 y 方向导数,第三个参数保存输出的变量。
imgX = filters.sobel(img,1, img_x)
img_y = zeros(img.shape)
imgY = filters.sobel(img,0, img_y)# 梯度
magnitude = sqrt(img_x**2+img_y**2)
subplot(221)
imshow(img, cmap='gray'), title('original')
subplot(222)
imshow(imgX, cmap='gray'), title('x')
subplot(223)
imshow(imgY, cmap='gray'), title('y')
subplot(224)
imshow(magnitude, cmap='gray'), title('magnitude')
show()return
输出如下: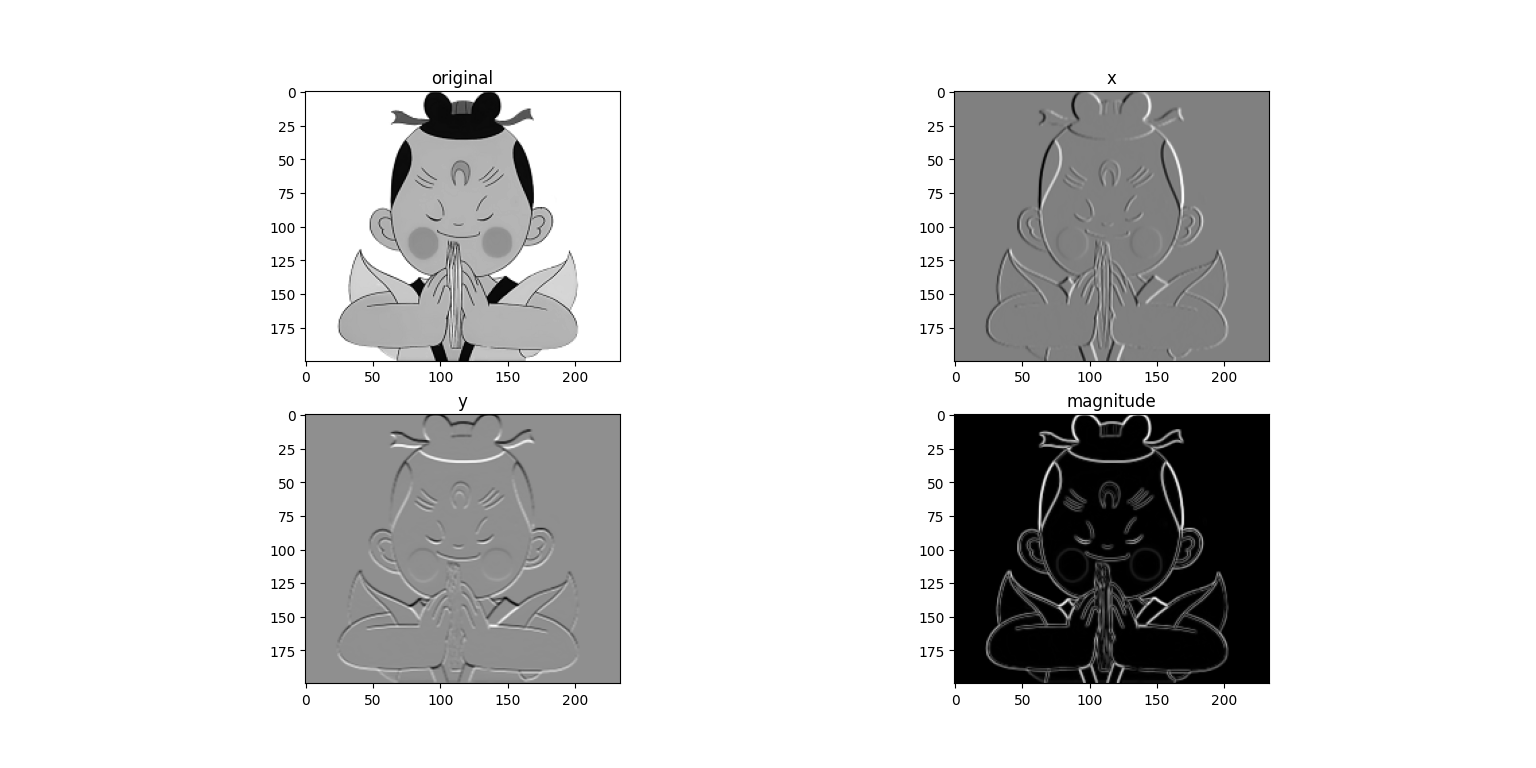
上图从左往右从上往下依次为原始灰度图像;x方向导数图像;y方向导数图像;梯度大小图像。在两个导数图像中,正导数显示为亮的像素,负导数显示为暗的像素。灰色区域表示导数的值接近于零。
可以看到亮的地方大多为有明显对比色差的地方。
为了在图像噪声方面更稳健,以及在任意尺度上计算导数,我们可以使用高斯导数滤波器:
I
x
=
I
∗
G
σ
x
和
I
y
=
I
∗
G
σ
y
\boldsymbol{I}_{x}=\boldsymbol{I}^{*} G_{\sigma x} \text { 和 } \boldsymbol{I}_{y}=\boldsymbol{I}^{*} G_{\sigma y}
Ix=I∗Gσx 和 Iy=I∗Gσy
G
σ
x
G_σx
Gσx 和
G
σ
y
G_σy
Gσy表示
G
σ
G_σ
Gσ在 x 和 y 方向上的导数,
G
σ
G_σ
Gσ 为标准差为 σ 的高斯函数。
defgaussian(img, sigma):"""
函数功能:高斯滤波
参数说明:img__图像
sigma__高斯滤波参数
函数返回:无
"""
img_x = zeros(img.shape)
imgx = filters.gaussian_filter(img,(sigma, sigma),(0,1), img_x)
img_y = zeros(img.shape)
imgy = filters.gaussian_filter(img,(sigma, sigma),(1,0), img_y)
magnitude = sqrt(img_x **2+ img_y **2)return imgx, imgy, magnitude
defguassianFilter(fileName):"""
函数功能:高斯滤波对比
参数说明:fileName__图像存储路径
函数返回:无
"""
img_or = array(Image.open(fileName).convert('L'))
gray()
imgx1, imgy1, magnitude1 = gaussian(img_or,2)
imgx2, imgy2, magnitude2 = gaussian(img_or,5)
imgx3, imgy3, magnitude3 = gaussian(img_or,10)
subplot(341)
imshow(img_or), title('a'), axis('off')
subplot(342)
imshow(imgx1), title('b'), axis('off')
subplot(343)
imshow(imgx2), title('c'), axis('off')
subplot(344)
imshow(imgx3), title('d'), axis('off')
subplot(345)
imshow(img_or), title(''), axis('off')
subplot(346)
imshow(imgy1), title(''), axis('off')
subplot(347)
imshow(imgy2), title(''), axis('off')
subplot(348)
imshow(imgy3), title(''), axis('off')
subplot(349)
imshow(img_or), title(''), axis('off')
subplot(3,4,10)
imshow(magnitude1), title(''), axis('off')
subplot(3,4,11)
imshow(magnitude2), title(''), axis('off')
subplot(3,4,12)
imshow(magnitude3), title(''), axis('off')
show()return
输出如下: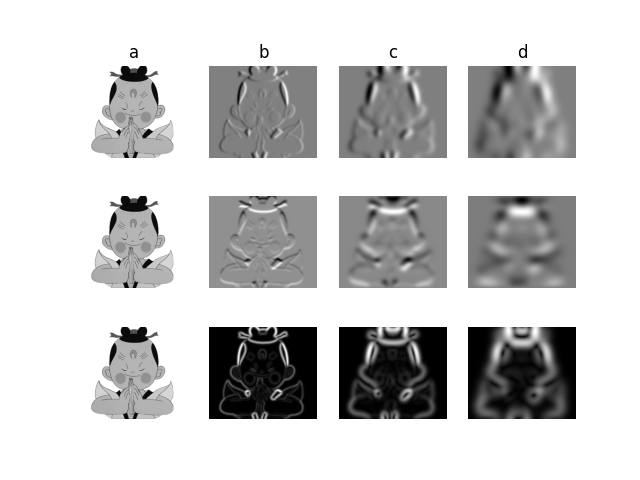
使用高斯导数计算图像导数: x 导数图像(上), y 导数图像(中),以及梯度大小图像(下);( a)为原始灰度图像,( b)为使用 σ=2 的高斯导数滤波器处理后的图像,( c)为使用 σ=5 的高斯导数滤波器处理后的图像,( d)为使用 σ=10 的高斯导数滤波器处理后的图像
形态学: 对象计数
形态学(或数学形态学)是度量和分析基本形状的图像处理方法的基本框架与集合。形态学通常用于处理二值图像,但是也能够用于灰度图像。 二值图像是指图像的每个像素只能取两个值,通常是 0 和 1。二值图像通常是,在计算物体的数目,或者度量其大小时,对一幅图像进行阈值化后的结果。
defbinaryImage(fileName):"""
函数功能:二值图像
参数说明:fileName__图像存储路径
函数返回:无
"""
img = array(Image.open(fileName).convert('L'))
gray()
subplot(221)
imshow(img), title('original')
img =1*(img <128)# ndimage.measurements.label(input, structure=None, output=None) # 输入一个数组,数组中非0值被认为是目标区域,0值是背景区域# 输出:label:一个被已经分好连通域的label图像:# num_feartures:统计一共有多少种连通分量的数量,例如数字5代表一共有5种,ID分别是1,2,3,4,5
labels, nbr_objects = measurements.label(img)print("number of objects:", nbr_objects)
subplot(222)
imshow(labels), title('the picture after label')# binary_opening() 函数的第二个参数指定一个数组结构元素。该数组表示以一个像素为中心时,# 使用哪些相邻像素。在这种情况下,我们在 y 方向上使用 9 个像素(上面 4 个像素、像素本身、下面 4 个像素),# 在 x 方向上使用 5 个像素。# iterations 决定执行该操作的次数。
img_open = morphology.binary_opening(img, ones((9,5)), iterations=2)
subplot(223)
imshow(img_open), title('open')
labels_open, nbr_objects_open = measurements.label(img_open)print("number of objects:",nbr_objects_open)
subplot(224)
imshow(labels_open), title('result')
show()return
输出结果如下:

程序识别出的连通区域有48个。
一些有用的SciPy模块
读写.mat文件
Matlab的 .mat 文件格式存储,那么可以使用 scipy.io 模块进行读取
data = scipy.io.loadmat('test.mat')
data 对象包含一个字典,字典中的键对应于保存在原始 .mat 文件中的变量名。由于这些变量是数组格式的,因此可以很方便地保存到 .mat 文件中。你仅需创建一个字典(其中要包含你想要保存的所有变量),然后使用savemat() 函数:
data ={}
data['x']= x
scipy.io.savemat('test.mat',data)
以图像形式保存数组
因为我们需要对图像进行操作,并且需要使用数组对象来做运算,所以将数组直接保存为图像文件非常有用。imsave() 函数可以从 scipy.misc 模块中载入。要将数组 im 保存到文件中,可以使用
下面的命令:
from scipy.misc import imsave
imsave('test.jpg',im)
#该脚本返回一个 512× 512 的灰度图像数组。
lena = scipy.misc.lena()
1.5 高级示例: 图像去噪
图像去噪是在去除图像噪声的同时,尽可能地保留图像细节和结构的处理技术。我们这里使用 ROF( Rudin-Osher-Fatemi) 去噪模型。ROF 模型具有很好的性质:使处理后的图像更平滑,同时保持图像边缘和结构信息。
ROF模型
一幅(灰度)图像
I
I
I的全变差(Total Variation,TV)定义为梯度范数之和。在连续表示的情况下,全变差表示为:
J
(
I
)
=
∫
∣
∇
I
∣
d
x
J(\boldsymbol{I})=\int|\nabla \boldsymbol{I}| \mathrm{d} \mathbf{x}
J(I)=∫∣∇I∣dx
在离散表示的情况下,全变差表示为:
J
(
I
)
=
∑
x
∣
∇
I
∣
J(\boldsymbol{I})=\sum_{\mathbf{x}}|\nabla \boldsymbol{I}|
J(I)=x∑∣∇I∣
其中,上面的式子是在所有图像坐标 x=[x, y] 上取和。
在 Chambolle 提出的 ROF 模型里,目标函数为寻找降噪后的图像 U,使下式最小:
min
U
∥
I
−
U
∥
2
+
2
λ
J
(
U
)
\min _{U}\|\boldsymbol{I}-\boldsymbol{U}\|^{2}+2 \lambda J(\boldsymbol{U})
Umin∥I−U∥2+2λJ(U)
其中范数||
I
−
U
I-U
I−U || 是去噪后图像 U 和原始图像
I
I
I差异的度量。也就是说,本质上该模型使去噪后的图像像素值“平坦”变化,但是在图像区域的边缘上,允许去噪后的图像像素值“跳跃”变化。
ROF模型去噪代码实现:
defimageFilter(fileName):"""
函数功能:图像去噪
参数说明:fileName__图像存储路径
函数返回:无
"""
img = array(Image.open(fileName).convert('L'))
gray()# 添加噪声# 括号里的参数要换成和图片一样大小的。
img = img +30*standard_normal((200,234))
U, T = denoise(img, img)
G = filters.gaussian_filter(img,5)
subplot(131)
imshow(img), title('original'),axis('off')
subplot(132)
imshow(U), title('rof'),axis('off')
subplot(133)
imshow(G), title('gaussian'),axis('off')
show()return
输出如下: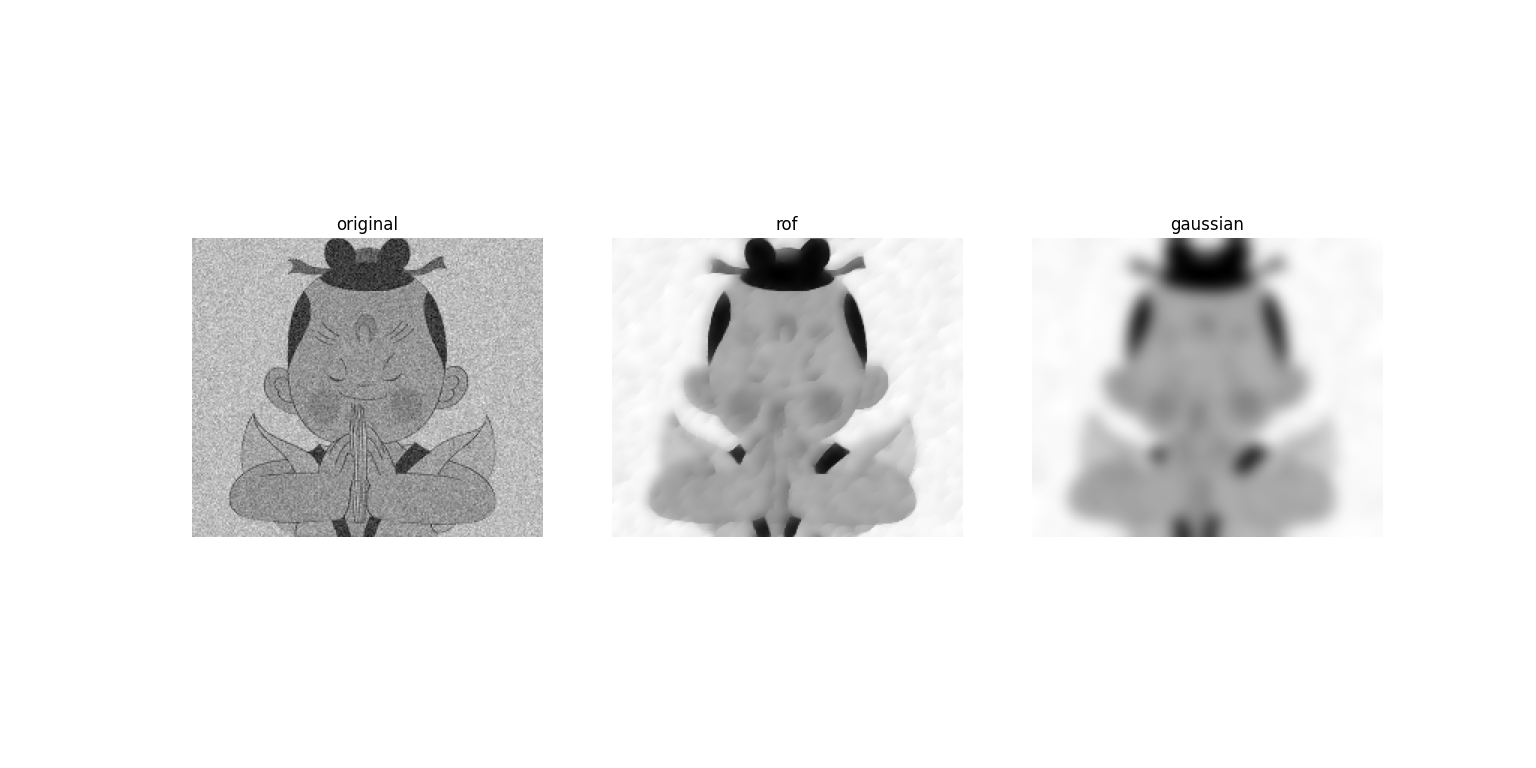
对比rof滤波和告诉滤波。rof整体图像虽然也是糊的,但是他的边缘信息保留的比较突出。对比高斯滤波整个图形都是模糊的。
1.6小结
本章内容很杂,介绍图像读取、显示、局部操作、保存、滤波等等基本操作。虽然繁多但是都是最基本的操作。是我们后续进行对图片进一步处理的基础。
本章用到的代码(我使用的Python是3.8的,有需要自取):
链接:https://pan.baidu.com/s/1SjJn4a6P7GgpvKS0uXqRhQ?pwd=jbmf
提取码:jbmf
版权归原作者 书生丶丶 所有, 如有侵权,请联系我们删除。