
文章目录
2. IMU原理及姿态融合算法详解
一、组合
IMU
全称是
惯性导航系统
,主要元件有陀螺仪、加速度计和磁力计。其中,陀螺仪可以得到各个轴的加速度,而加速度计能够得到
x
x
x、
y
y
y、
z
z
z方向的加速度,而磁力计能获得周围磁场的信息。
主要的工作便是将三个传感器的数据融合得到较为准确的姿态信息。
二、 原理
a) 陀螺仪
陀螺仪是通过测量科氏力来检测角速度的,科氏力在大学物理中提到过,如下图:

一个物体以固定的线速度
v
v
v 运动,同时受到一个角速度的影响,这时候在叉乘方向上会有一个科氏力的作用,测量这个力便能直到角速度
w
w
w 的大小。
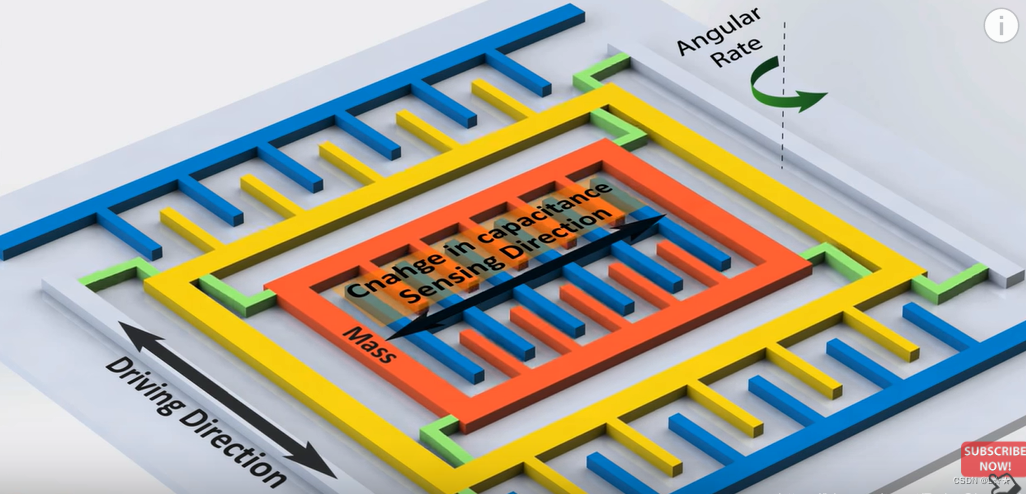
在实际的
MEME
传感器中,大致结构如图,在一个方向保持左右运动。若有旋转的角速度则会在垂直的方向产生科氏力,通过电容的变化来反应这个力的大小便能得到旋转速度的大小。
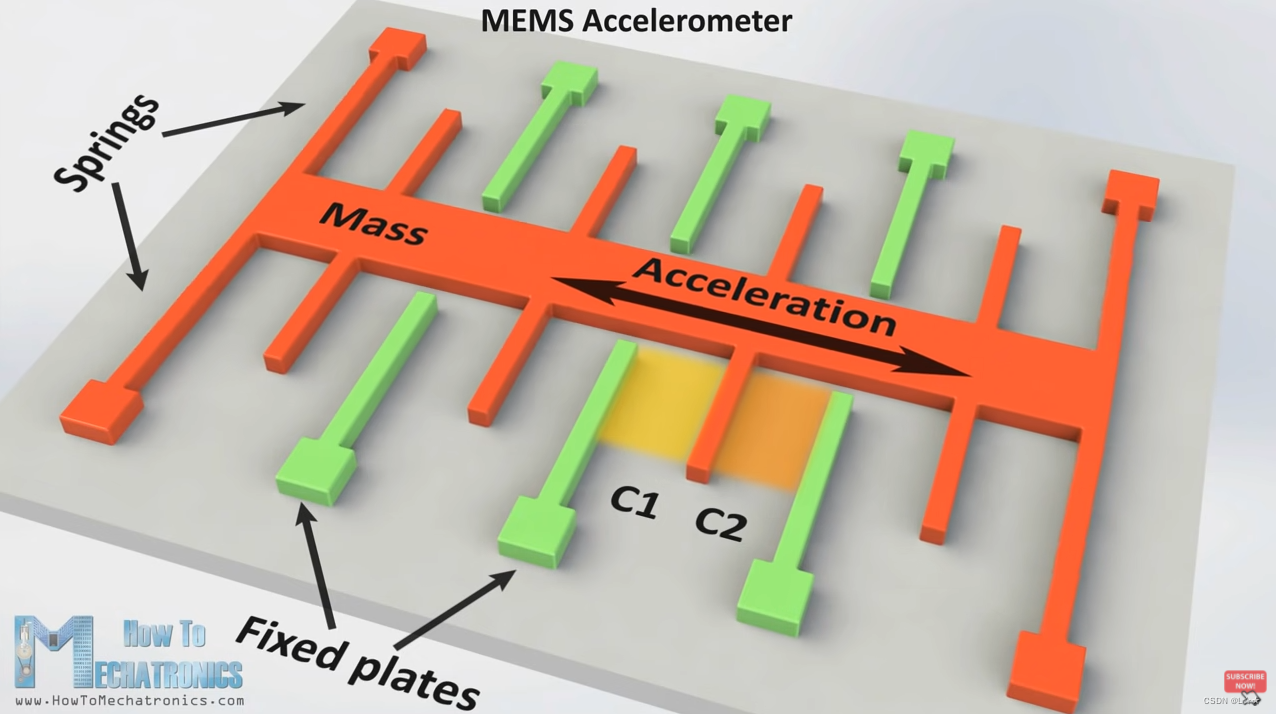
b) 加速度计
加速度计的原理较为简单,就是通过牛顿第二定律来测量三轴的加速度。图中的质量块受到加速度的作用会左右运动,而两侧的电容能测量质量块的位置,从而计算出加速度的大小。
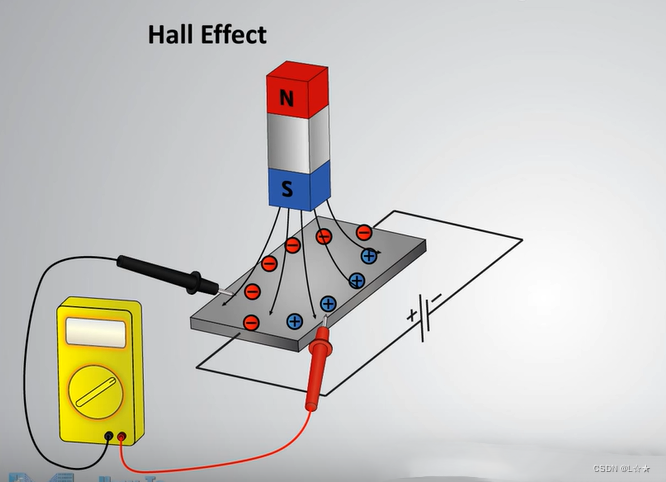
c) 磁力计
磁力计则是通过霍尔效应来测量磁场的强度,高中物理中学过霍尔效应也很简单,如图。一端通电,在磁场的作用下电子会往垂直的方向上跑,从而在侧面产生电场,通过测量这个电场的强度及正负则能间接测量出厂强的大小。
视频介绍如下: https://www.youtube.com/watch?v=eqZgxR6eRjo&feature=youtu.be
三、 旋转的表达
a) 欧拉角
对姿态的描述,最直观的便是欧拉角。可以用维基百科上的一张动图直观的表示:
b) 旋转矩阵
线性代数中,有讲解过,使用
3
×
3
3 \times 3
3×3 的矩阵可以表达物体的旋转,如绕
Z
Z
Z 轴的旋转可以表示为:
[
x
′
y
′
z
′
1
]
=
[
cos
θ
−
sin
θ
0
0
sin
t
h
e
t
a
cos
θ
0
0
0
0
1
0
0
0
0
1
]
⋅
[
x
y
z
1
]
(1)
\begin{bmatrix} x^{'} \\ y^{'} \\ z^{'} \\ 1 \end{bmatrix} = \begin{bmatrix} \cos \theta & -\sin \theta & 0 & 0 \\ \sin theta & \cos \theta & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix} \cdot \begin{bmatrix} x \\ y \\ z \\ 1 \end{bmatrix} \tag {1}
⎣⎢⎢⎡x′y′z′1⎦⎥⎥⎤=⎣⎢⎢⎡cosθsintheta00−sinθcosθ0000100001⎦⎥⎥⎤⋅⎣⎢⎢⎡xyz1⎦⎥⎥⎤(1)
其他轴旋转可以自行百度。
c) 四元数
四元数的运算表达比较难理解,但是在数学上却可以优雅而完美的表达三维空间中的旋转。它可以很好的避免欧拉角存在的万向锁问题,和轴角存在的不适合插值的缺点,同时它所需的参数量较少,因此现有的大部分效果较好的解法都是采用四元数解算的。
这里主要介绍如何通过四元数来更新姿态:
**已知当前姿态为四元数
q
1
q_1
q1 ,在
Δ
t
\Delta t
Δt 时间内的角速度为
ω
\omega
ω, 求下一刻的四元数。**
一般来说,采用一阶龙格库塔法来更新四元数,主要的思路便是 泰勒展开式,然后一阶近似。
具体计算流程如下:
[
q
0
q
1
q
2
q
3
]
t
+
Δ
t
=
[
q
0
q
1
q
2
q
3
]
t
+
Δ
t
2
[
−
ω
x
q
1
−
ω
y
q
2
−
ω
z
q
3
ω
x
q
0
+
ω
z
q
2
−
ω
y
q
3
ω
y
q
0
−
ω
z
q
1
+
ω
x
q
3
ω
z
q
0
+
ω
y
q
1
−
ω
x
q
2
]
(2)
\begin{bmatrix} q_0 \\ q_1 \\ q_2 \\ q_3 \end{bmatrix}_{t + \Delta t} = \begin{bmatrix} q_0 \\ q_1 \\ q_2 \\ q_3 \end{bmatrix}_{t} + \frac{\Delta t}{2} \begin{bmatrix} -\omega _x q_1 - \omega_y q_2 - \omega_z q_3 \\ \omega_x q_0 + \omega_z q_2 - \omega_y q_3 \\ \omega_y q_0 - \omega_z q_1 + \omega_x q_3 \\ \omega_z q_0 + \omega_y q_1 - \omega_x q_2 \end{bmatrix} \tag {2}
⎣⎢⎢⎡q0q1q2q3⎦⎥⎥⎤t+Δt=⎣⎢⎢⎡q0q1q2q3⎦⎥⎥⎤t+2Δt⎣⎢⎢⎡−ωxq1−ωyq2−ωzq3ωxq0+ωzq2−ωyq3ωyq0−ωzq1+ωxq3ωzq0+ωyq1−ωxq2⎦⎥⎥⎤(2)
d) 李群
SO
(
3
)
\text{SO}(3)
SO(3) 及 李代数
so
(
3
)
\text{so}(3)
so(3)
对于这两种表达方法在主流陀螺仪的姿态解算中并不常见,但是在某些算法中需要对姿态进行求导时,便需要采用李群的方法去表达姿态。
比如对旋转的求导如下:
∂
Rp
∂
φ
=
lim
φ
→
0
exp
(
φ
∧
)
exp
(
ϕ
∧
)
p
−
exp
(
ϕ
∧
)
p
φ
=
lim
φ
→
0
I
+
φ
∧
exp
(
φ
∧
)
p
−
exp
(
φ
∧
)
p
φ
=
lim
φ
→
0
φ
∧
Rp
φ
=
lim
φ
→
0
−
(
Rp
)
∧
φ
φ
=
−
(
Rp
)
∧
(3)
\begin{aligned} \frac{\partial \textbf{Rp}}{\partial \varphi } &= \lim_{\varphi \to 0} \frac{\exp(\varphi^{\wedge}) \exp (\phi^{\wedge})\textbf{p} -\exp(\phi^{\wedge})\textbf{p}}{\varphi } \\ &= \lim_{\varphi \to 0} \frac{\textbf{I} + \varphi^{\wedge}\exp (\varphi^{\wedge})\textbf{p} -\exp (\varphi^{\wedge})\textbf{p}}{\varphi } \\ &= \lim_{\varphi \to 0} \frac{\varphi^{\wedge } \textbf{Rp}}{\varphi} \\ &= \lim_{\varphi \to 0}\frac{-(\textbf{Rp})^{\wedge} \varphi }{\varphi} \\ &= -(\textbf{Rp})^{\wedge} \end{aligned} \tag{3}
∂φ∂Rp=φ→0limφexp(φ∧)exp(ϕ∧)p−exp(ϕ∧)p=φ→0limφI+φ∧exp(φ∧)p−exp(φ∧)p=φ→0limφφ∧Rp=φ→0limφ−(Rp)∧φ=−(Rp)∧(3)
具体可参考高翔博士的《视觉SLAM 14讲》
博客:https://www.cnblogs.com/gaoxiang12/p/5137454.html
视频:https://www.bilibili.com/video/BV16t411g7FR?p=3&vd_source=484659340e491a658a0140936c410c09
个人笔记:https://blog.csdn.net/weixin_43662553/article/details/128161000?spm=1001.2014.3001.5502
四、 传感器的噪声及去除
传感器噪声,一般分为两种:
- 随机噪声:一般认为随机噪声是符合高斯分布的
- 固定误差:固定误差是由于传感器的测量原理导致的,这部分通常是去噪的重点。实际上,由于制造和安装误差,会有许许多多的固定误差。但是由于使用要求不高,且大部分校准需要高精度转台,只能做较为简单的校准工作。
a) 陀螺仪
陀螺仪直接测量的是角速度而非角度,所以需要通过一次积分才能得到角度值。
在积分过程中,若有固定的、某一个方向的数据,则会在积分的过程中,不断加大影响导致角度偏差。
通常来说,陀螺仪的温漂是比较严重的,基本上温漂正比于芯片的价格,越贵的芯片漂的越少。温漂的数据既与温度相关,又与时间相关。也就是说,不同温度下不一样,不同上电时间下也不一样。
通常简单的做法是:在上电的时候静止一段时间计算出此时的零偏,然后每次减去零偏。
更高级的方法需要标定温度与零偏的关系,然后线性插补;另一方面使用艾伦方差分析法得到零偏和时间的关系(艾伦方差法见博客https://blog.csdn.net/yandld/article/details/81101984)。
对于其他的误差,比如三轴不相互垂直,以及尺度因子不一致等误差,都可以忽略。
当然,更好的情况是在电路上做一个温度控制,维持在温度
50
°
50°
50° 左右(必须要在常温以上)。
b) 加速度计
对于加速度计,同样会有零漂和尺度因子的误差,但是加速度计在静止时可直接得到角度而不需要积分,所以零漂的影响很小,但是尺度因子的影响较大。
同样是重力加速度,各个面朝下时检测到的数值是不一样的。一般来说,校准的方法有六面校准。 就是各个面朝下,然后记录重力的数值,计算得到尺度因子。目前
MEMS
传感器的精度已经很高了,很多情况下只用正面朝上校准一次即可(仅适用于无人机)。
若要求不高,可以不去校准加速度计,而对于云台有其他的校准思路。
c) 磁力计
磁力计的数据误差较大,校准便显得很重要。
一般可以导出数据到
MATLAB
中,然后采用 椭球校准的方法 。但是这样比较麻烦,主要用于写论文…
而大多数飞控的做法,都是直接在单片机上处理的,步骤如下:
- 先头朝上,水平旋转一周
- 然后头朝下,再水平旋转一周。
- 若计算能力有限,可直接求最大最小数据的中值,得到偏差,然后计算幅值,
save.mag_offset[i] = 0.5f *(max_t[i] + min_t[i]);//中值校准
save.mag_gain[i] = safe_div(200.0f ,(0.5f *(max_t[i] - min_t[i])),0);//幅值校准
- 若计算能力较充裕,采用
LM算法可计算出三维的偏差和三维的尺度因子,具体参考天穹飞控代码。
五、姿态解算原理
IMU
的算法紧紧地围绕着如何利用这三个元器件,获得准确的姿态,基本要求有几点:
- 滞后效应不明显
- 角度准确
- 静止时角度不漂
但很多时候,都无法满足所有的要求,需要根据实际情况的需求来有所取舍。
a) 陀螺仪
陀螺仪获得角度的方法很简单,直接积分就好了。但是直接积分会带来巨大的误差!!
第一个原因如图所示:
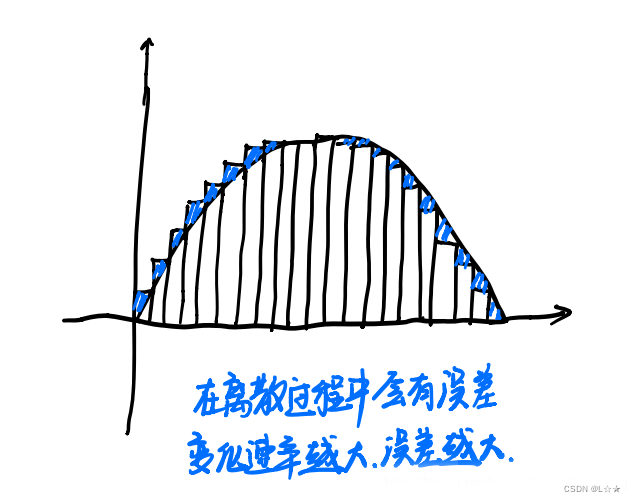
解决方法如下,采用中值积分:

另一个方面,陀螺仪得到的旋转数据是基于机体坐标系的,而我们要求的是世界坐标系下的姿态,这中间必然有一个坐标变换的关系:
[
ω
x
ω
y
ω
z
]
=
[
cos
γ
0
−
cos
θ
sin
γ
0
1
sin
θ
sin
γ
0
cos
cos
γ
]
[
θ
˙
γ
˙
ψ
˙
]
⟶
θ
,
γ
较小
[
θ
˙
γ
˙
ψ
˙
]
=
[
0
0
0
0
0
0
0
0
0
]
⋅
[
θ
γ
ψ
]
+
[
ω
x
ω
y
ω
z
]
\begin{bmatrix} \omega _x \\ \omega_y \\ \omega_z \end{bmatrix} = \begin{bmatrix} \cos \gamma & 0 & -\cos \theta \sin \gamma \\ 0 & 1 & \sin \theta \\ \sin \gamma & 0 & \cos \cos \gamma \end{bmatrix}\begin{bmatrix} \dot{\theta} \\ \dot{\gamma } \\ \dot{\psi} \end{bmatrix}\stackrel{\theta,\space \gamma \text{较小}}{\longrightarrow} \begin{bmatrix} \dot{\theta} \\ \dot{\gamma } \\ \dot{\psi} \end{bmatrix}=\begin{bmatrix} 0 & 0 & 0 \\ 0 & 0 & 0 \\ 0 & 0 & 0 \end{bmatrix} \cdot \begin{bmatrix} \theta \\ \gamma \\ \psi \end{bmatrix} + \begin{bmatrix} \omega _x \\ \omega_y \\ \omega_z \end{bmatrix}
⎣⎡ωxωyωz⎦⎤=⎣⎡cosγ0sinγ010−cosθsinγsinθcoscosγ⎦⎤⎣⎡θ˙γ˙ψ˙⎦⎤⟶θ, γ较小⎣⎡θ˙γ˙ψ˙⎦⎤=⎣⎡000000000⎦⎤⋅⎣⎡θγψ⎦⎤+⎣⎡ωxωyωz⎦⎤
对于无人机来说,
pitch
和
roll
都比较小,可以认为是
0
0
0,则旋转矩阵变为了单位矩阵。
但是对于云台和其他应用场景下,都很难做这个近似,写代码的时候切勿直接积分。
b) 加速度计
加速度计的作用便是直接测量出
pitch
和
roll
的角度,对积分得到的角度进行一个矫正。
基本原理见博客:http://www.starlino.com/imu_guide.html
一般情况下,网上都是采用互补滤波来综合加速度计角度不会漂,但噪声大;而陀螺仪角度精度却会漂的特点。
但加速度计计算角度的公式是有前提的:便是物体静止。而对于剧烈运动的物体则会引起巨大的误差,
这个时候有一个很重要的工作,就是做好加速度补偿,一般分为线加速度的补偿和角加速度的校准。
对于线加速度,很难得到有飞控源码中采用辅助姿态解算算法来做补偿(见天穹飞控源码),一般的处理方法可以计算角加速度计的模长,若越大,则加速度的置信度越小。
对于角加速度,可以通过陀螺仪来计算得到。
得到角加速度后,可以计算出切向加速度和法向加速度分别补偿。
c) 磁力计
磁力计可以看成一个指南针,可以对
yaw
轴 角度进行一个矫正。具体计算公式较为简单,但注意在套用公式前,需要对数据进行倾斜补偿。
具体见博客:https://blog.csdn.net/w8253497062015/article/details/79833321
还有一点需要注意的是:
在实际的工程源码中,通常都对公式进行了简化,这一点需要注意。
六、姿态解算算法
姿态解算算法五花八门,各种各样的都有,同一种算法还可以根据不同的旋转表达方法有不同的表达方式。
所以要用好一个算法需要对原理进行深入的了解,看到算法的最根本的东西,虽然很难,但必须要做。
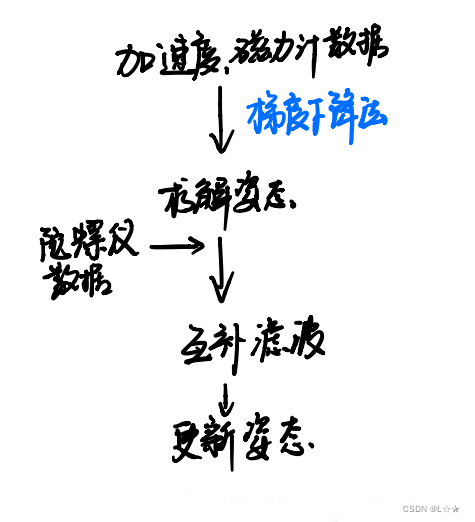
a) 互补滤波
主要思想在于:把陀螺仪的高频部分和磁力计或加速度计的低频部分叠加在一起,得到更准确、更稳定的姿态。
b) AHRS
AHRS 一般有两种思路——
Madgwick
和
Mahony
,具体的各种Google都可以得到。这里主要介绍各种思想:
- 首先是飞机较常用的
Mahony算法,算法应用在pix上较为成熟和经典
- 其次是,2012年开源出来的
madgwick算法,效果更好计算量也更大
c) 卡尔曼
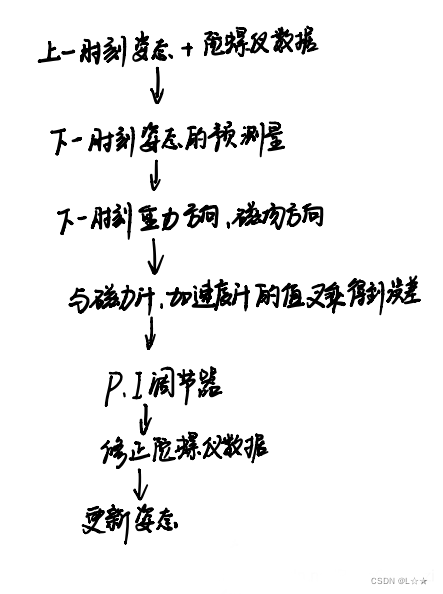
卡尔曼不仅仅用在陀螺仪的姿态解算上,所以对卡尔曼滤波本身的理解也十分重要。
对于卡尔曼算法可以建立不同的模型,来估计当前姿态,其中一种较为直观的是互补滤波的推广。
- 预测量:陀螺仪的积分角度
- 观测量:加速度计和磁力计分别计算出的
roll、pitch和yaw
七、 云台的特性及要求
roll轴角度几乎为零,而pitch轴角度较大- 安装位置不在中心,角加速度对加速度计的影响大
- 机器人起停时,会有较大的线加速度,对加速度计影响大
yaw轴零点位置要求不严格,而pitch轴要求零点必须水平
对于云台的
yaw
轴,通常采用
AHRS_Madgwick
的思路,需要注意的是:
- 在动态情况下,原论文的互补滤波效果更好
- 在静态情况下,将互补滤波换为卡尔曼滤波更好
陀螺仪的算法基本可以参考
Madgwick
的算法思路,对陀螺仪算法最最重要的点在于:
- 利用现有的参数对算法进行较好的初始化
- 尽量根据使用场景情况,在算法推导过程中做简化,再根据自己的推导写代码
- 误差的校准,加速度的补偿
版权归原作者 L☆★ 所有, 如有侵权,请联系我们删除。