
一、前言
近期在实际项目中使用到了PID控制算法,于是就该算法做一总结。
二、PID控制算法详解
2.1 比例控制算法
例子:
假设一个水缸,需要最终控制水缸的水位永远维持在1米的高度。
水位目标:T
当前水位:Tn
加水量:U
误差:error
error=T-Tn
比例控制系数:kpU = k p ∗ e r r o r U = k_p * error U=kp∗errorinitial: T=1; Tn=0.2, error=1-0.2=0.8; kp=0.4
2.1.1 比例控制python简单示意
T=1
Tn=0.2
error=1-0.2
kp=0.4for t inrange(1,10):
U = kp * error
Tn += U
error = T-Tn
print(f't={t} | add {U:.5f} => Tn={Tn:.5f} error={error:.5f}')"""
t=1 | add 0.32000 => Tn=0.52000 error=0.48000
t=2 | add 0.19200 => Tn=0.71200 error=0.28800
t=3 | add 0.11520 => Tn=0.82720 error=0.17280
t=4 | add 0.06912 => Tn=0.89632 error=0.10368
t=5 | add 0.04147 => Tn=0.93779 error=0.06221
t=6 | add 0.02488 => Tn=0.96268 error=0.03732
t=7 | add 0.01493 => Tn=0.97761 error=0.02239
t=8 | add 0.00896 => Tn=0.98656 error=0.01344
t=9 | add 0.00537 => Tn=0.99194 error=0.00806
"""
2.1.2 比例控制存在的一些问题
根据kp取值不同,系统最后都会达到1米,只不过kp大了达到的更快。不会有稳态误差。
若存在漏水情况,在相同情况下,经过多次加水后,水位会保持在0.75不在再变化,因为当U和漏水量一致的时候将保持不变——即稳态误差
U
=
k
p
∗
e
r
r
o
r
=
0.1
=
>
e
r
r
o
r
=
0.1
/
0.4
=
0.25
U=k_p*error=0.1 => error = 0.1/0.4 = 0.25
U=kp∗error=0.1=>error=0.1/0.4=0.25,所以误差永远保持在0.25
T=1
Tn=0.2
error=1-0.2
kp=0.4
extra_drop =0.1for t inrange(1,100):
U = kp * error
Tn += U - extra_drop
error = T-Tn
print(f't={t} | add {U:.5f} => Tn={Tn:.5f} error={error:.5f}')"""
t=95 | add 0.10000 => Tn=0.75000 error=0.25000
t=96 | add 0.10000 => Tn=0.75000 error=0.25000
t=97 | add 0.10000 => Tn=0.75000 error=0.25000
t=98 | add 0.10000 => Tn=0.75000 error=0.25000
t=99 | add 0.10000 => Tn=0.75000 error=0.25000
"""
实际情况中,这种类似水缸漏水的情况往往更加常见
- 比如控制汽车运动,摩擦阻力就相当于是"漏水"
- 控制机械臂、无人机的飞行,各类阻力和消耗相当于"漏水"
所以单独的比例控制,很多时候并不能满足要求
2.2 积分控制算法(消除稳态误差)
比例+积分控制算法:
U
=
k
p
∗
e
r
r
o
r
+
k
i
∗
∑
e
r
r
o
r
U = k_p*error + k_i * \sum error
U=kp∗error+ki∗∑error
∑ e r r o r \sum error ∑error: 误差累计k i k_i ki: 积分控制系数
2.2.1 python简单实现
T=1
Tn=0.2
error=1-0.2
kp=0.4
extra_drop =0.1
ki=0.2
sum_error =0for t inrange(1,20):
sum_error += error
U = kp * error + ki * sum_error
Tn += U - extra_drop
error = T-Tn
print(f't={t} | add {U:.5f} => Tn={Tn:.5f} error={error:.5f}')"""
t=14 | add 0.10930 => Tn=0.97665 error=0.02335
t=15 | add 0.11025 => Tn=0.98690 error=0.01310
t=16 | add 0.10877 => Tn=0.99567 error=0.00433
t=17 | add 0.10613 => Tn=1.00180 error=-0.00180
t=18 | add 0.10332 => Tn=1.00512 error=-0.00512
t=19 | add 0.10097 => Tn=1.00608 error=-0.00608
"""
2.3 微分控制算法(减少控制中的震荡)
在越靠近目标的时候则加的越少。
U
=
k
d
∗
(
e
r
r
o
r
t
−
e
r
r
o
r
t
−
1
)
U=k_d*(error_t - error_{t-1})
U=kd∗(errort−errort−1)
- kd: 微分控制系数
- d_error/d_t ~= error_t - error_t_1:误差的变化
加入微分控制算法的python简单示意
令:kd=0.2; d_error = 当前时刻误差-前时刻误差
T=1
Tn=0.2
error=1-0.2
kp=0.4
extra_drop =0.1
ki=0.2
sum_error =0
kd=0.2
d_error =0
error_n =0
error_b =0for t inrange(1,20):
error_b = error_n
error_n = error
# print(error_b1, error_b2)
d_error = error_n - error_b if t >=2else0
sum_error += error
U = kp * error + ki * sum_error + kd * d_error
Tn += U - extra_drop
error = T-Tn
print(f't={t} | add {U:.5f} => Tn={Tn:.5f} error={error:.5f} | d_error: {d_error:.5f}')"""
t=14 | add 0.09690 => Tn=0.96053 error=0.03947 | d_error: 0.01319
t=15 | add 0.10402 => Tn=0.96455 error=0.03545 | d_error: 0.00310
t=16 | add 0.10808 => Tn=0.97263 error=0.02737 | d_error: -0.00402
t=17 | add 0.10951 => Tn=0.98214 error=0.01786 | d_error: -0.00808
t=18 | add 0.10899 => Tn=0.99113 error=0.00887 | d_error: -0.00951
t=19 | add 0.10727 => Tn=0.99840 error=0.00160 | d_error: -0.00899
"""
2.4 PID算法总结
pid = 比例控制(基本控制) + 积分控制(消除稳态误差)+微分控制(减少震荡)
U
(
t
)
=
K
p
∗
e
r
r
o
r
t
+
K
i
∑
i
=
0
t
e
r
r
o
r
i
+
K
d
∗
(
e
r
r
o
r
t
−
e
r
r
o
r
t
−
1
)
U(t) = K_p * error_t + K_i\sum_{i=0}^{t}error_i + K_d*(error_t - error_{t-1})
U(t)=Kp∗errort+Kii=0∑terrori+Kd∗(errort−errort−1)
K p K_p Kp:快速调整 比例控制P control能够提高系统的响应速度和稳态精度,抑制扰动对系统稳态的影响。但过大的比例控制容易导致系统超调和振荡,并且有可能使得系统变得不稳定。 纯比例控制并不能消除稳态误差,存在静差。K i K_i Ki:准确到最终目标,积分控制能够消除0型系统对于常值输入信号和常值扰动造成的输出稳态误差,可以与P control一起组成PI control。积分控制的常数 根据系统所需的动态进去选取,并不会影响消除误差的效果,具有一定的鲁棒性。K d K_d Kd: 稳步迭代, 微分器会对高频噪音有放大的效果
for kp_i in np.linspace(0, 1, 10):
pid_plot(kp=kp_i, ki=0.2, kd=0.2)
for ki_i in np.linspace(0, 1, 10):
pid_plot(kp=0.5, ki=ki_i, kd=0.2)
for kd_i in np.linspace(0, 1, 10):
pid_plot(kp=0.5, ki=0.2, kd=kd_i)
pid_plot(kp=0.65, ki=0.05, kd=0.5, print_flag=True)
三、牛顿法调参
损失函数采用:RMSE
from scipy import optimize
import matplotlib.pyplot as plt
import numpy as np
defpid_plot(args, plot_flag=True, print_flag=False):
kp, ki, kd = args
T=1
Tn=0.2
error=1-0.2
extra_drop =0.1
sum_error =0
d_error =0
error_n =0
error_b =0
Tn_list =[]for t inrange(1,100):
error_b = error_n
error_n = error
d_error = error_n - error_b if t >=2else0
sum_error += error
U = kp * error + ki * sum_error + kd * d_error
Tn += U - extra_drop
error = T-Tn
Tn_list.append(Tn)if print_flag:print(f't={t} | add {U:.5f} => Tn={Tn:.5f} error={error:.5f} | d_error: {d_error:.5f}')if plot_flag:
plt.plot(Tn_list)
plt.axhline(1, linestyle='--', color='darkred', alpha=0.8)
plt.title(f'$K_p$={kp:.3f} $K_i$={ki:.3f} $K_d$={kd:.3f}')
plt.ylim([0,max(Tn_list)+0.2])
plt.show()
loss = np.sqrt(np.mean(np.square(np.ones_like(Tn_list)- np.array(Tn_list))))return loss
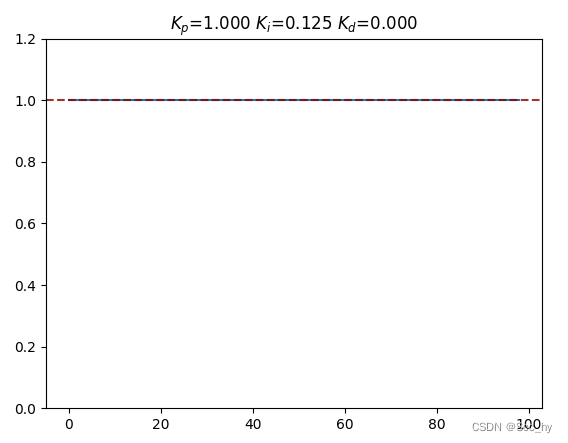
boundaries=[(0,2),(0,2),(0,2)]
res = optimize.fmin_l_bfgs_b(pid_plot, np.array([0.1,0.1,0.1]), args=(False,False), bounds = boundaries, approx_grad =True)
pid_plot(res[0].tolist(), print_flag=True)
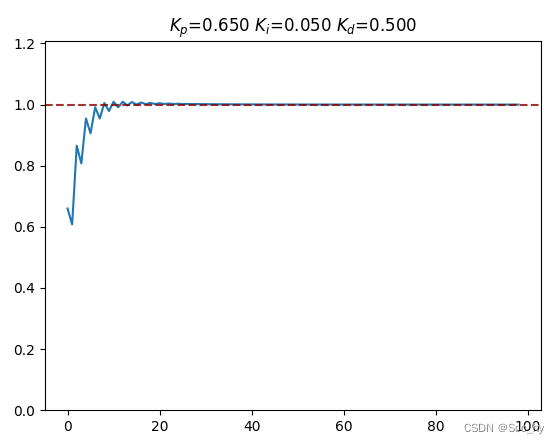
pid_plot([0.65,0.05,0.5], print_flag=True)
- 牛顿法调参结果图示
- 简单手动调参图示
本文转载自: https://blog.csdn.net/Scc_hy/article/details/126355639
版权归原作者 Scc_hy 所有, 如有侵权,请联系我们删除。
版权归原作者 Scc_hy 所有, 如有侵权,请联系我们删除。