
文章目录
build_targets作用
build_targets函数用于网络训练时计算loss所需要的目标框,即正样本。
注意
- 与yolov3/yolov4不同,yolv5支持跨网格预测。即每一个bbox,正对于任何一个输出层,都可能有anchor与之匹配。
- 该函数输出的正样本框比传入的GT数目要多。
- 当前解读版本为6.1
可视化结果
- TODO
过程
- 首先通过bbox与当前层anchor做一遍过滤。对于任何一层计算当前bbox与当前层anchor的匹配程度,不采用IoU,而采用shape比例。如果anchor与bbox的宽高比差距大于4,则认为不匹配,保留下匹配的bbox。
r = t[...,4:6]/ anchors[:,None]# wh ratio
j = torch.max(r,1/ r).max(2)[0]< self.hyp['anchor_t']# compare# j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
t = t[j]# filter
- 最后根据留下的bbox,在上下左右四个网格四个方向扩增采样。
gxy = t[:,2:4]# grid xy
gxi = gain[[2,3]]- gxy # inverse
j, k =((gxy %1< g)&(gxy >1)).T
l, m =((gxi %1< g)&(gxi >1)).T
j = torch.stack((torch.ones_like(j), j, k, l, m))
t = t.repeat((5,1,1))[j]
详细代码解读
准备
defbuild_targets(self, p, targets):
P是网络预测的输出。
p的shape为
:(batch_size,anchor_num,grid_cell,grid_cell,xywh+obj_confidence+classes_num)
P[0]的shape
P[1]的shape
P[2]的shape
targets是经过数据增强(mosaic等)后总的bbox。
targets的shape为
:[num_obj, 6] , that number 6 means -> (img_index, obj_index, x, y, w, h)
na, nt = self.na, targets.shape[0]# number of anchors, targets
tcls, tbox, indices, anch =[],[],[],[]
tcls:用来存储类别。
tbox:用来存储bbox
indices:用来存储第几张图片,当前层的第几个anchor,以及当前层grid的下标。
gain = torch.ones(7, device=self.device)# normalized to gridspace gain
初始化为1,用来还原bbox为当前层的尺度大小。
ai = torch.arange(na, device=self.device).float().view(na,1).repeat(1, nt)# same as .repeat_interleave(nt)
扩充anchor数量和当前bbox一样多。
ai是anchor的下标
targets = torch.cat((targets.repeat(na,1,1), ai[...,None]),2)# append anchor indices
targets的shape变为(3,101,7)。
targets[0]
对应第一个anchor对应的(image_id, cls, center_x,center_y, w, h,第一个anchor)
targets[1]
对应第一个anchor对应的(image_id, cls, center_x,center_y, w, h,第二个anchor)
targets[2]
对应第一个anchor对应的(image_id, cls, center_x,center_y, w, h,第三个anchor)
# 预定义的偏移量
g =0.5# bias
off = torch.tensor([[0,0],[1,0],[0,1],[-1,0],[0,-1],# j,k,l,m# [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm],
device=self.device).float()* g # offsets
for i inrange(self.nl):# 枚举每一层
anchors = self.anchors[i]# 当前层anchor
self.anchors
self.anchors[0]
得到第一层归一化后的anchor
乘8得到的
self.anchors[1]
得到第二层归一化后的anchor
乘16得到的
self.anchors[2]
得到第三层归一化后的anchor
乘以32得到的
gain[2:6]= torch.tensor(p[i].shape)[[3, 2, 3, 2]]# xyxy gain
生成一个当前层的方格大小。
如果i=0
如果i=1,
如果i=2
t = targets * gain
将targets的大小映射到当前层,第六列是当前层的第几个anchor,第0列是位于哪张图片,第1列代表的是类别,2-5列是目标在当前层x,y,w,h。
下采样八倍的层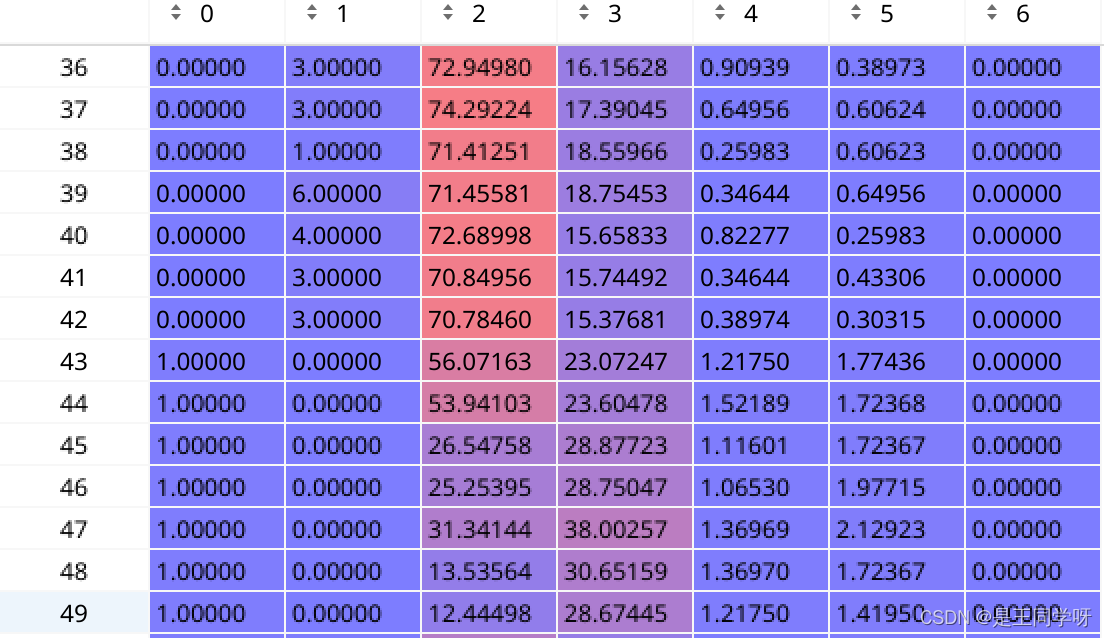
第一遍筛选
if nt:# 如果存在目标
r = t[..., 4:6] / anchors[:, None]
r是指bbox与当前层三个anchor的高宽的比值。
r[0]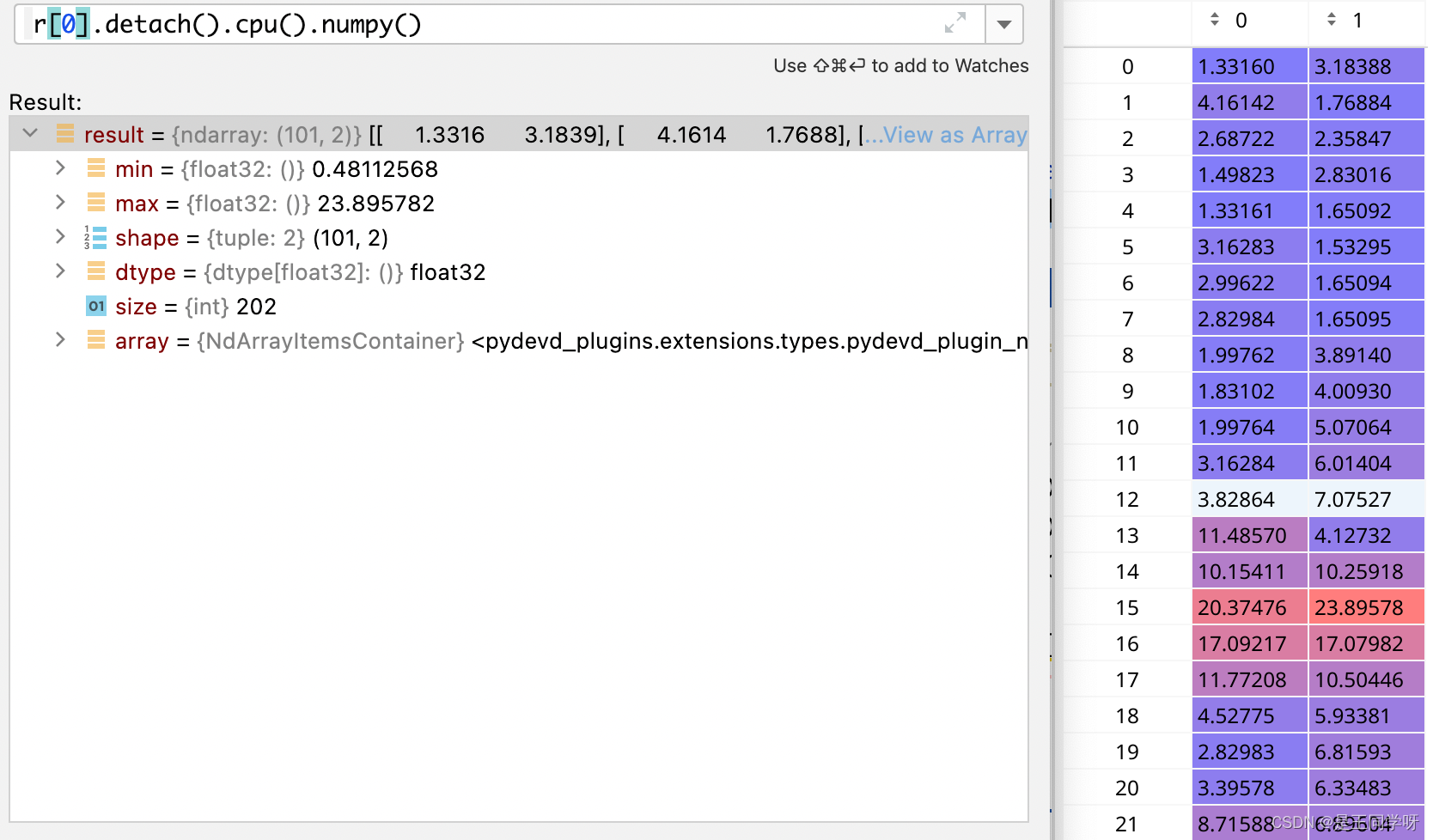
r[1]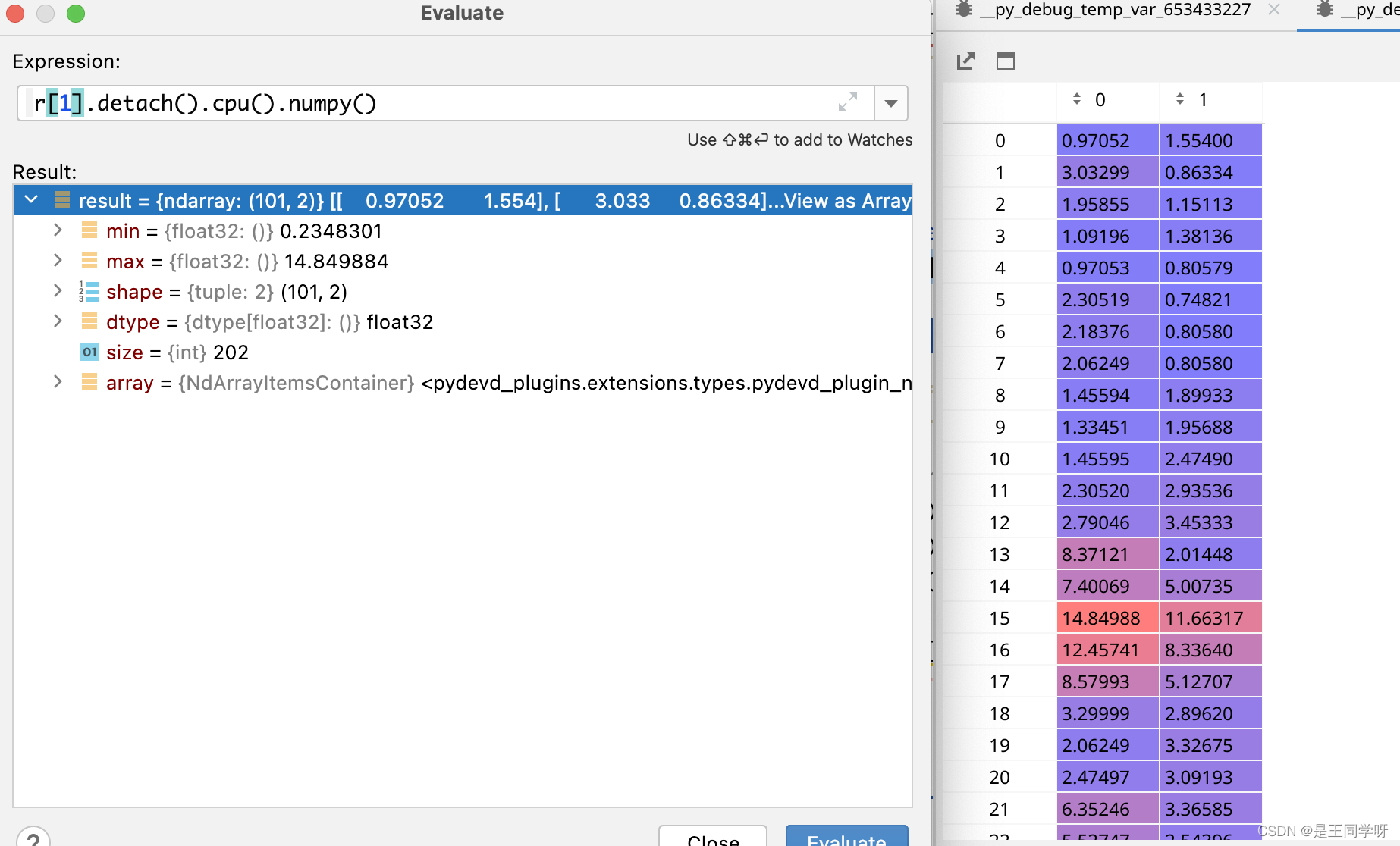
r[2]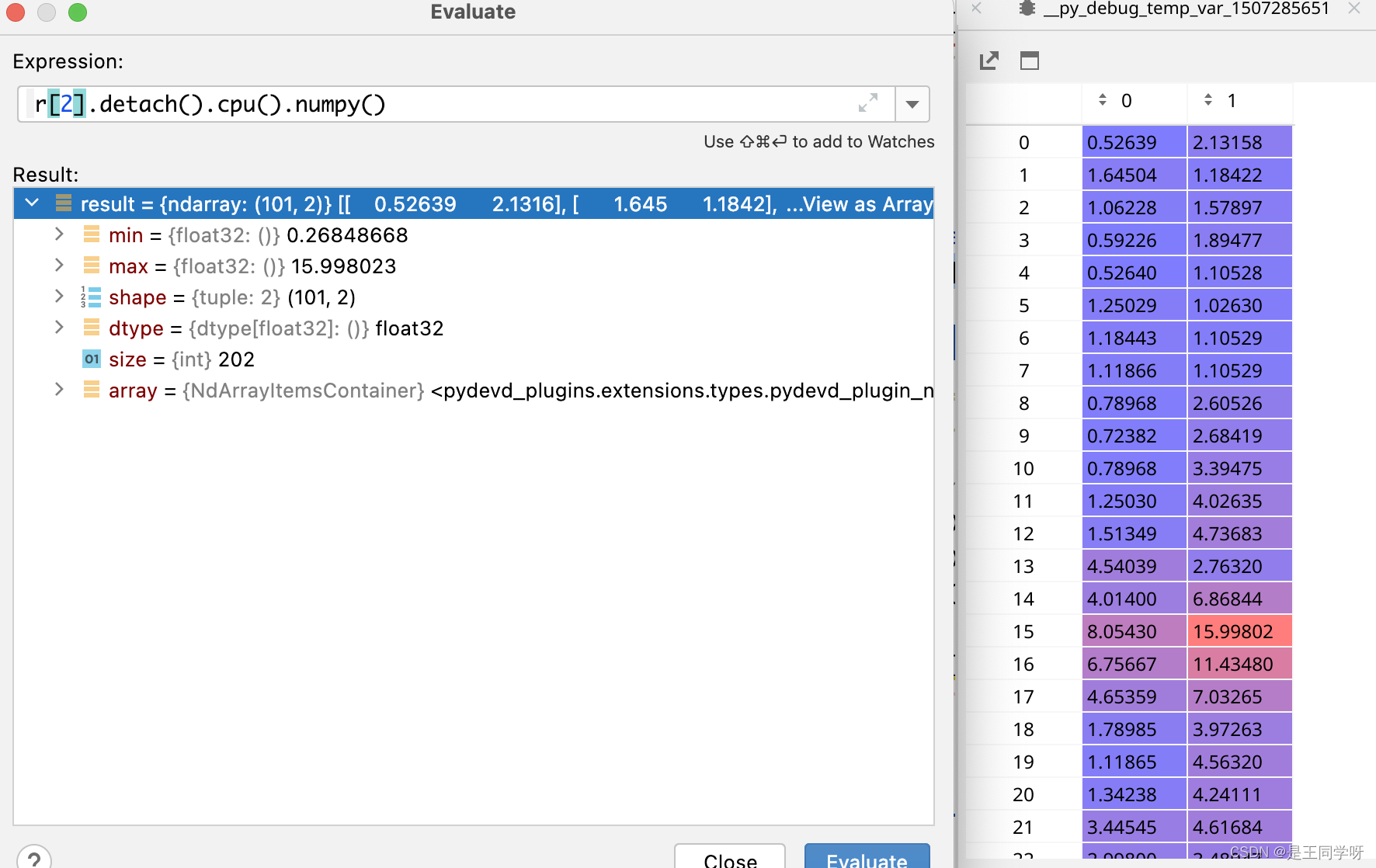
j = torch.max(r, 1 / r).max(2)[0]< self.hyp['anchor_t']# compare
torch.max(r, 1 / r).max(2)[0]
为什么是
[0]
不是
[1]
.[0]代表的是value,[1]代表的index。

torch.max(r, 1 / r).max(2)[1]

torch.max(r, 1 / r).max(1)[0]
按行获取最大值。
torch.max(r, 1 / r).max(1)[1]
按行获取最大值,返回索引。
t = t[j]# filter
经过过滤后,全部汇总到来了一起。按照第六列anchor的顺序排列。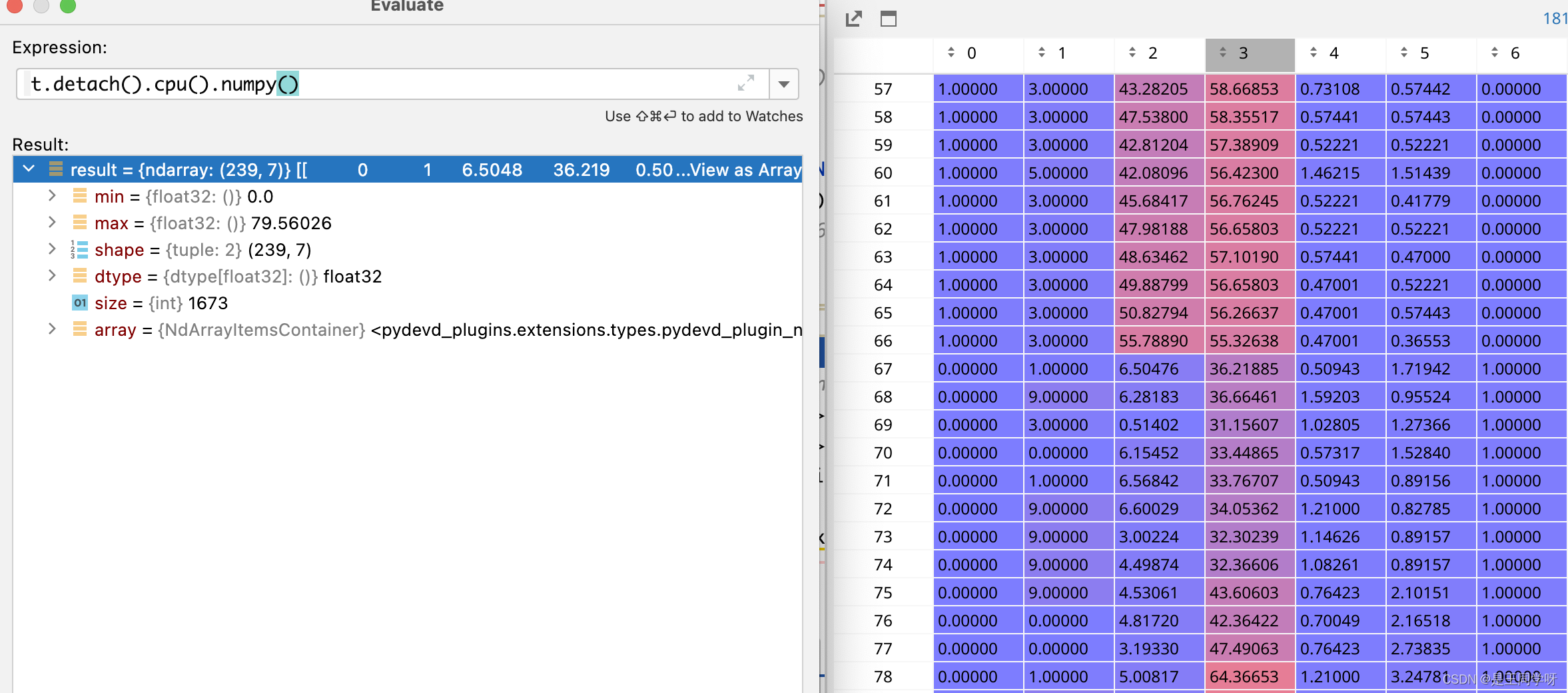
扩增正样本
接下来是扩增正样本
gxy = t[:,2:4]# grid xy # 获取x,y
gxi = gain[[2,3]]- gxy # inverse
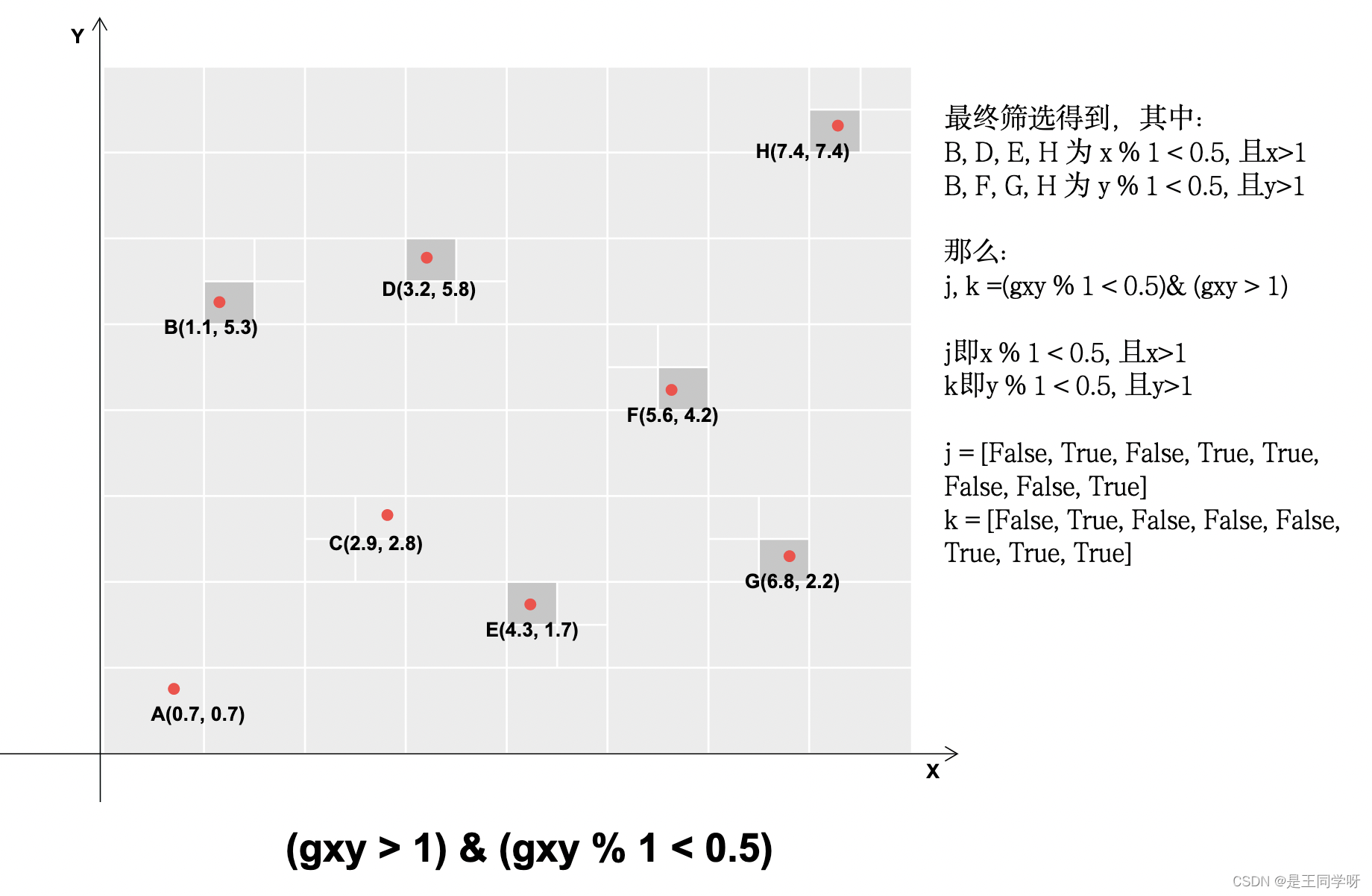
假设最后的特征图大小是8x8,有a-h8个目标边框如下。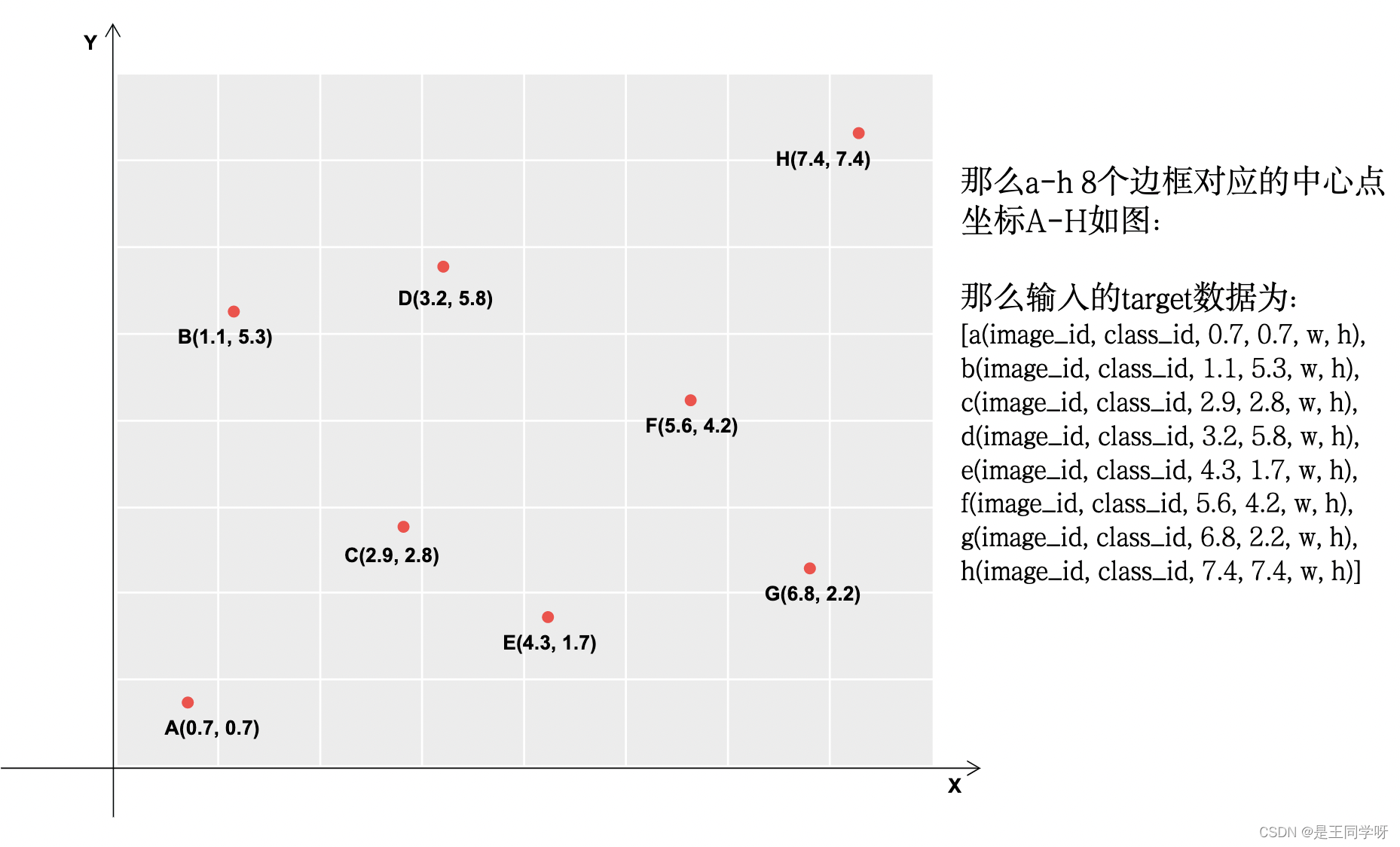
下图中深灰色的表示满足条件的。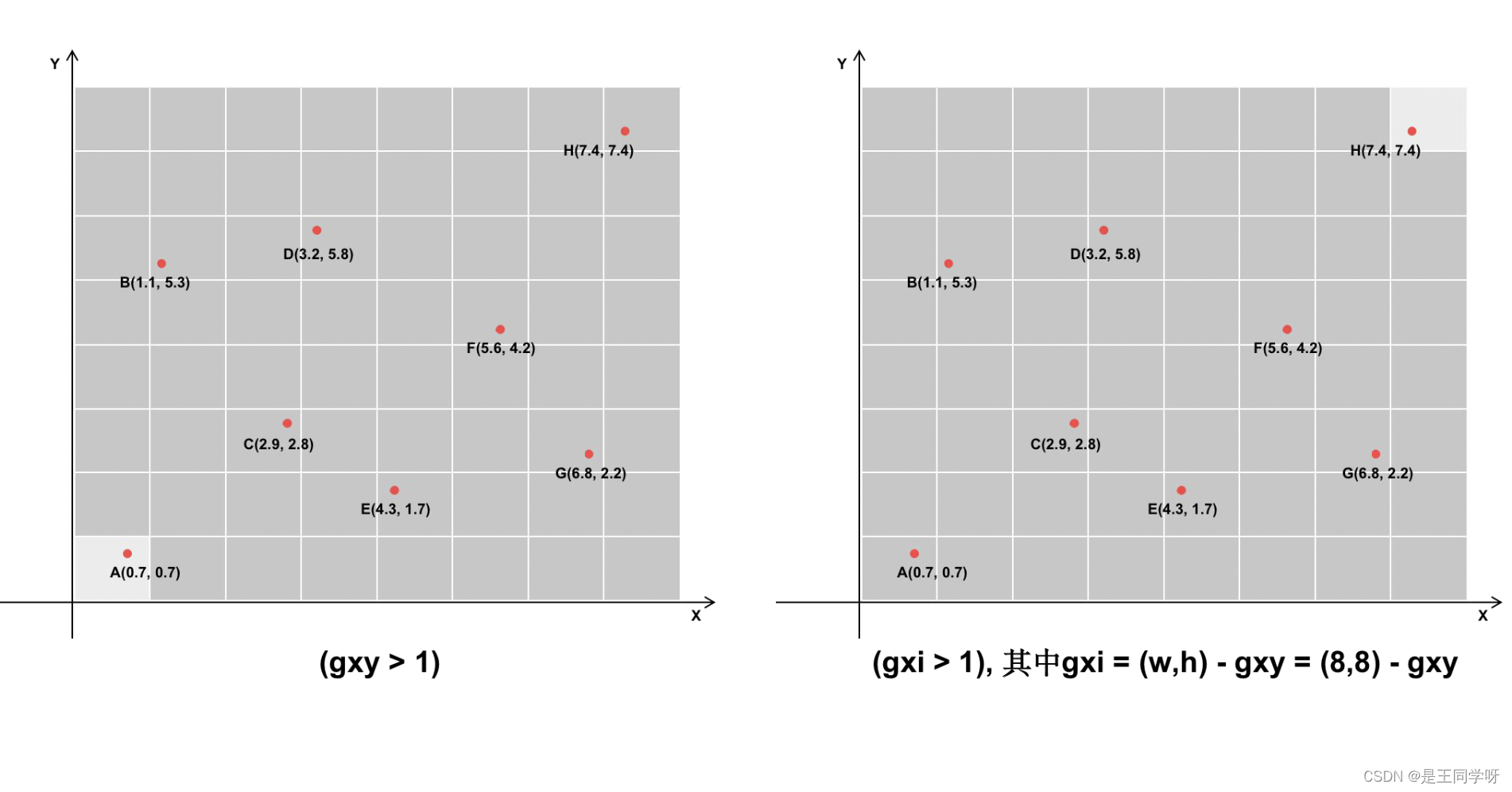
j, k =((gxy %1< g)&(gxy >1)).T
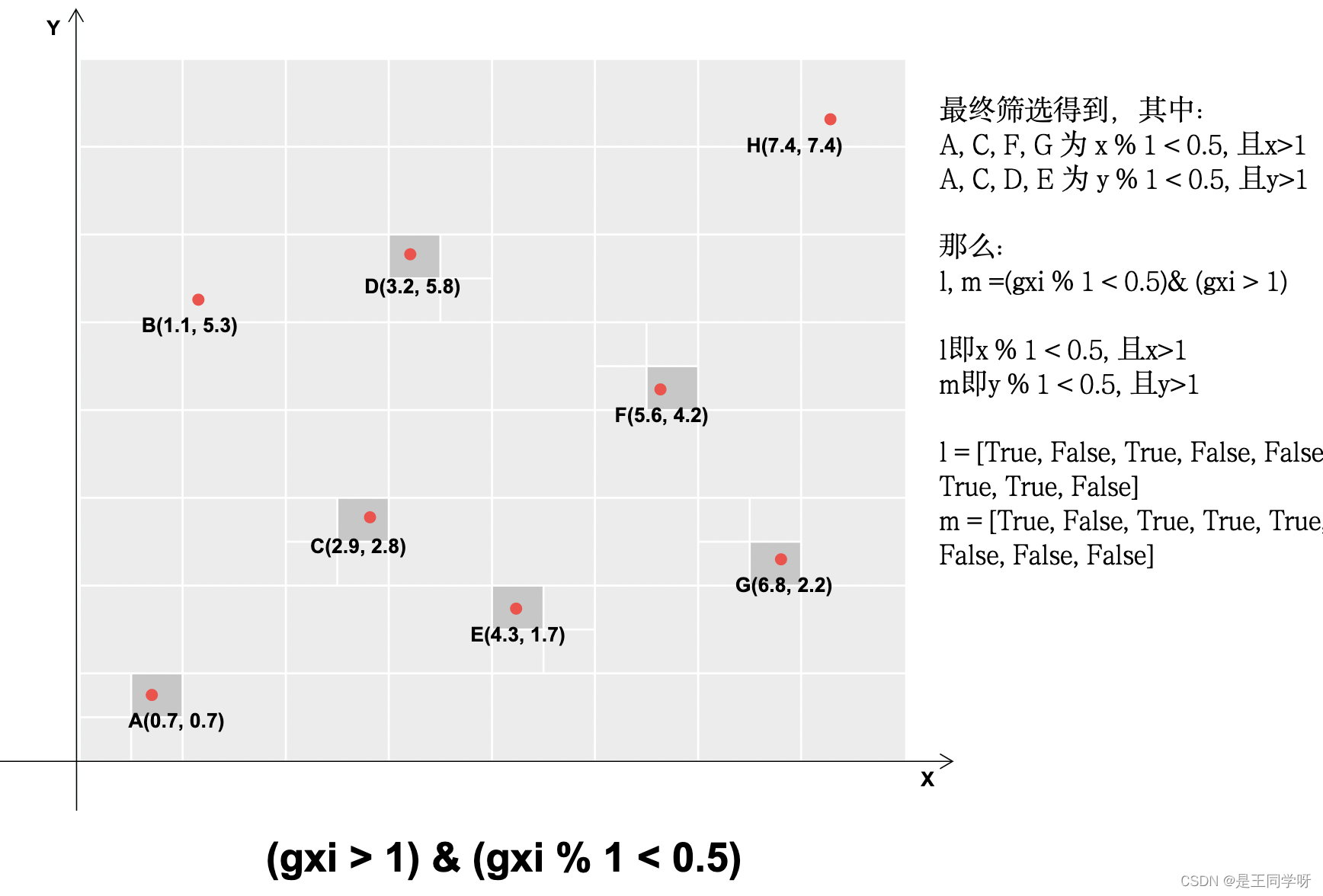
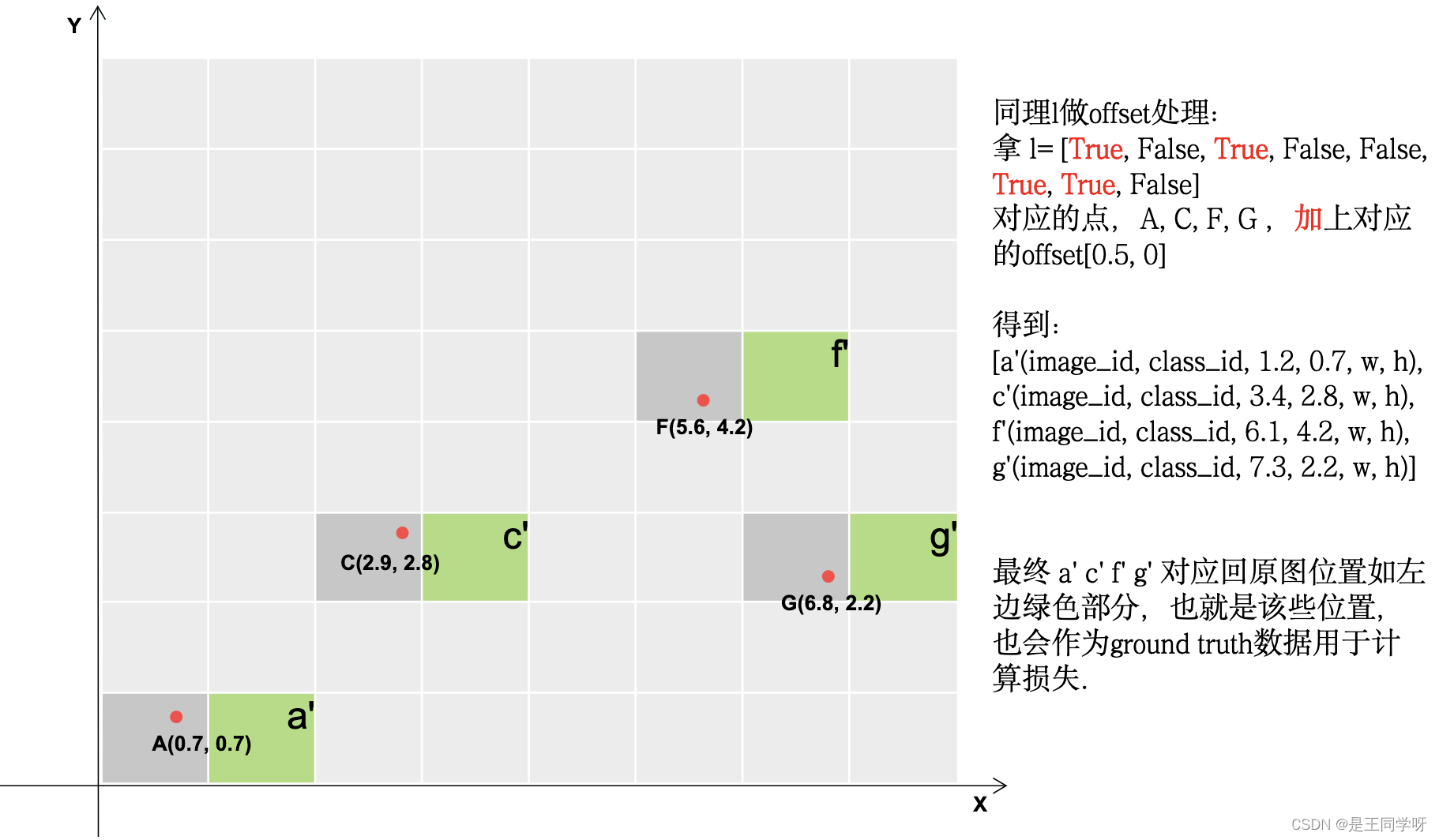
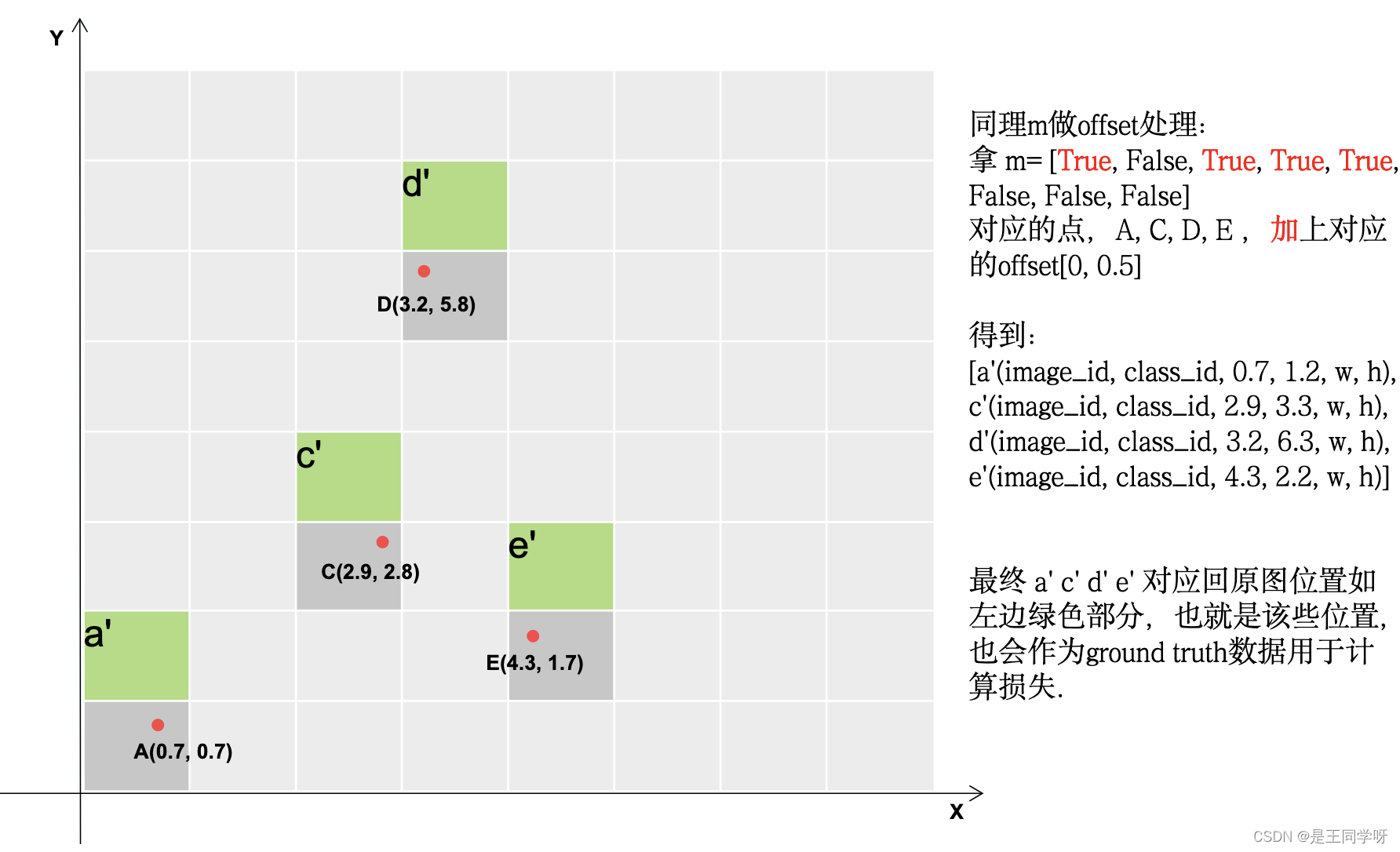
l, m =((gxi %1< g)&(gxi >1)).T
gxy % 1 < g
和
gxi % 1 < g
包含两个方向,x和y方向。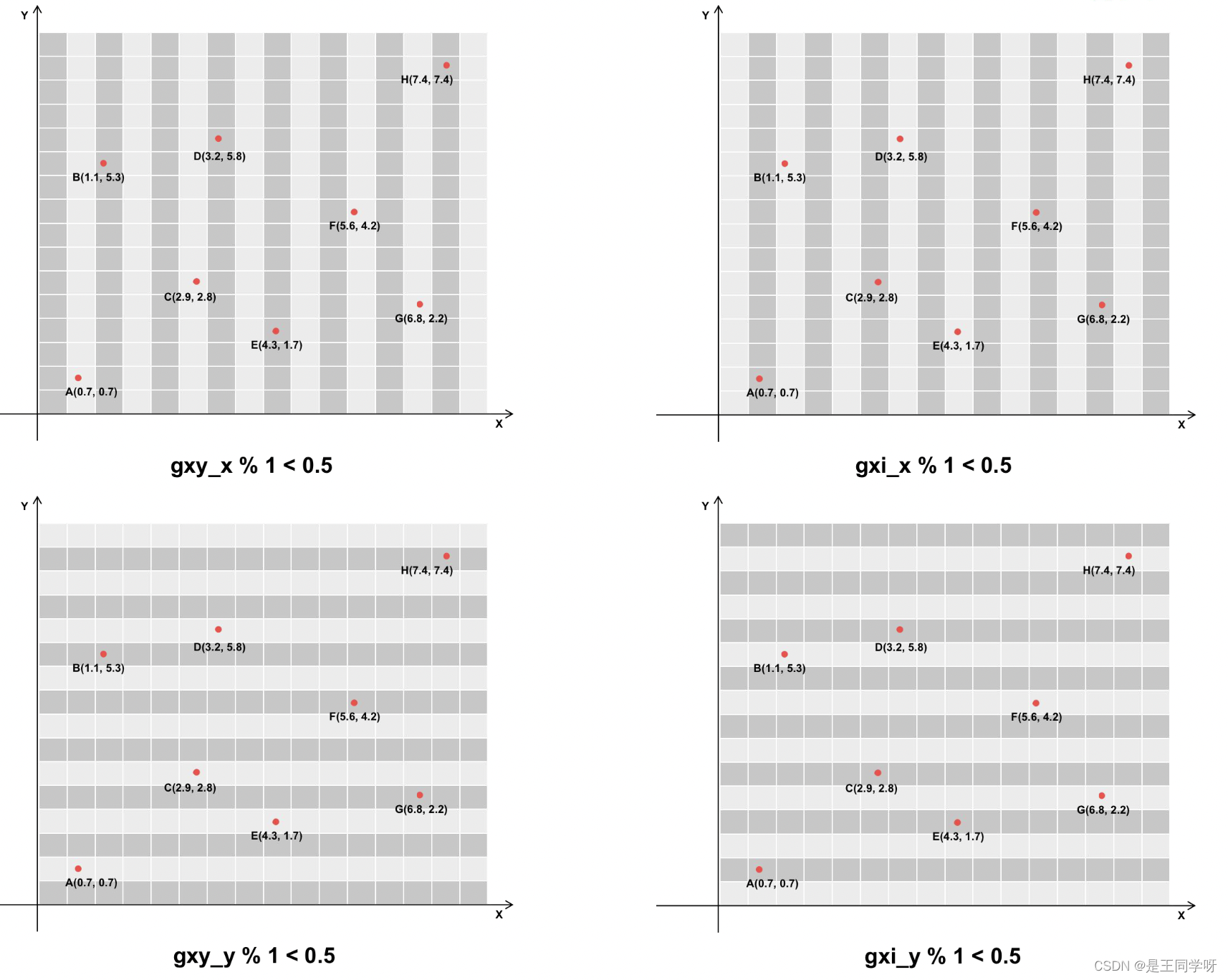
((gxy %1< g)&(gxy >1))#条件合并得到下图
(gxi %1< g)&(gxi >1)# 条件合并得到下图
j = torch.stack((torch.ones_like(j), j, k, l, m))
t = t.repeat((5,1,1))[j]# yolov5不仅用目标中心点所在的网格预测该目标,还采用了距目标中心点的最近两个网格# 所以有五种情况,网格本身,上下左右|----------------------------------------------------------------------|| 这里将t复制5个,然后使用j来过滤 || 第一个t是保留经过第一步过滤留下的gtbox,因为上一步里面增加了一个全为true的维度|| 第二个t保留了靠近方格左边的gtbox, || 第三个t保留了靠近方格上方的gtbox, || 第四个t保留了靠近方格右边的gtbox, || 第五个t保留了靠近方格下边的gtbox, ||----------------------------------------------------------------------|
offsets =(torch.zeros_like(gxy)[None] + off[:, None])[j]# 生成偏移矩阵
j的第一行全为1,意思是指经过第一步保留下的bbox所在的grid_cell为1.
else:
t = targets[0]
offsets =0
# Define
bc, gxy, gwh, a = t.chunk(4,1)# (image, class), grid xy, grid wh, anchors
a,(b, c)= a.long().view(-1), bc.long().T # anchors, image, class
gij =(gxy - offsets).long()#减去偏置,得到更多的正样本所在的网格。
gi, gj = gij.T # grid indices
下面的四张图展示了
gij = (gxy - offsets).long()
做了啥。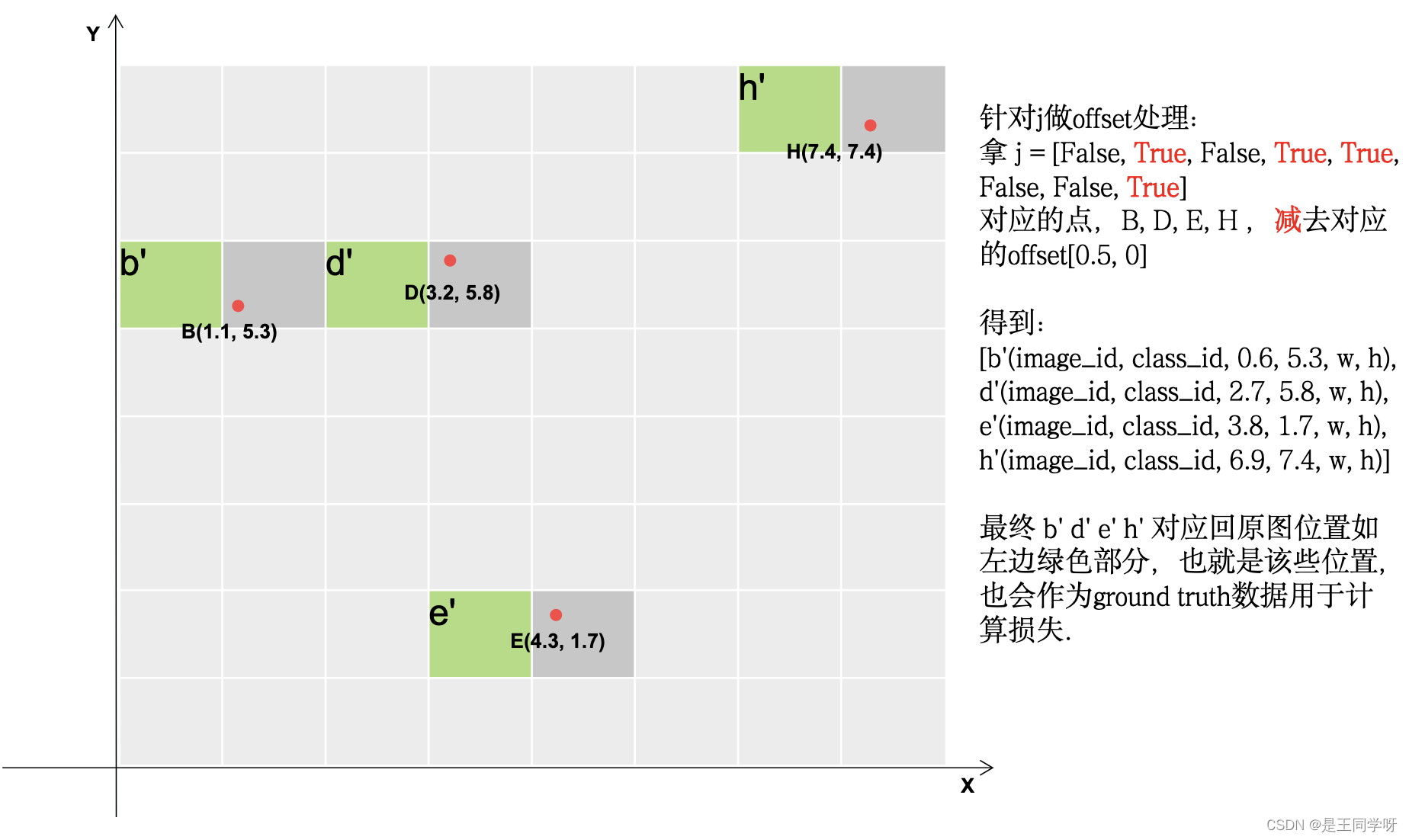
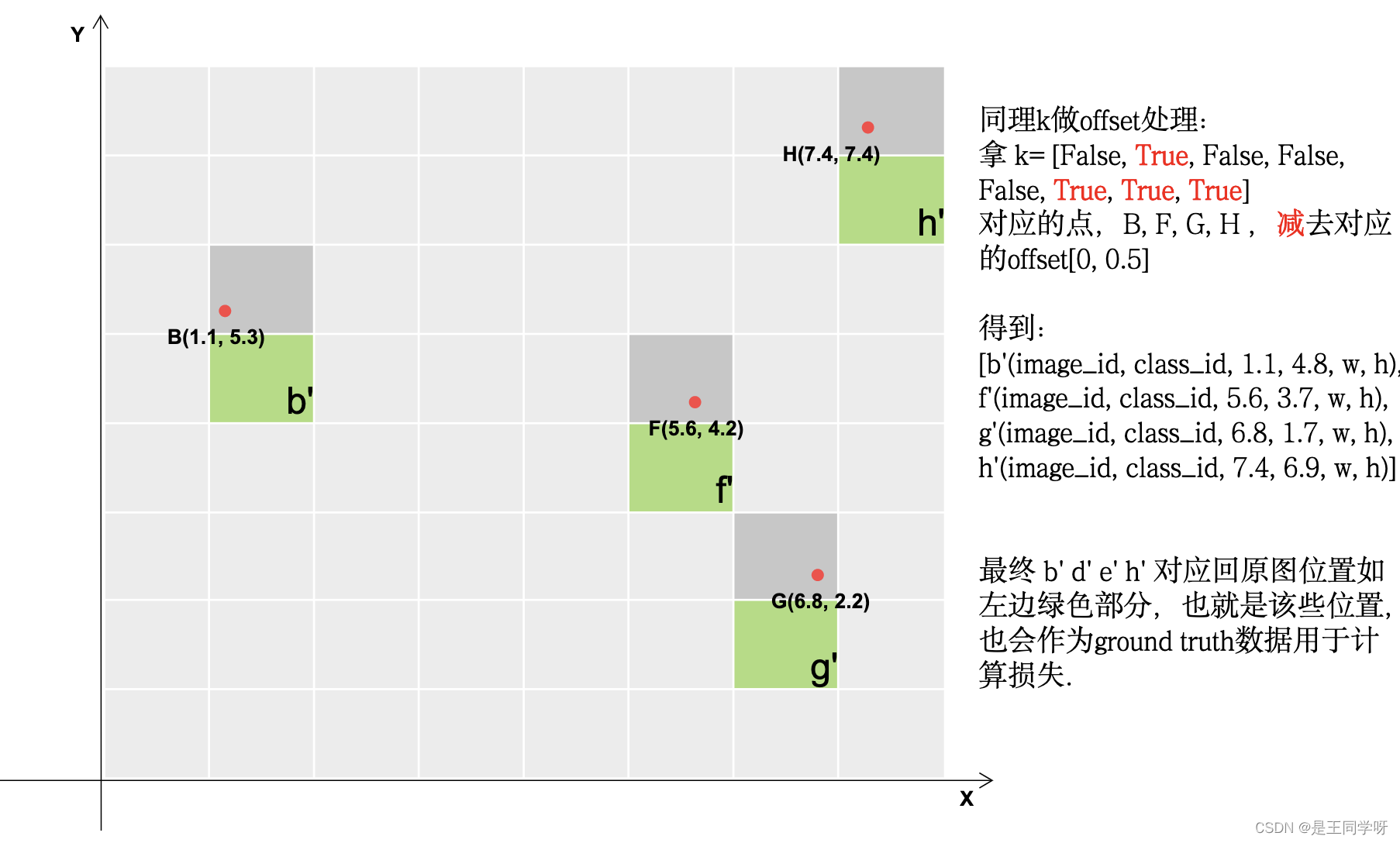
最终得到的结果如下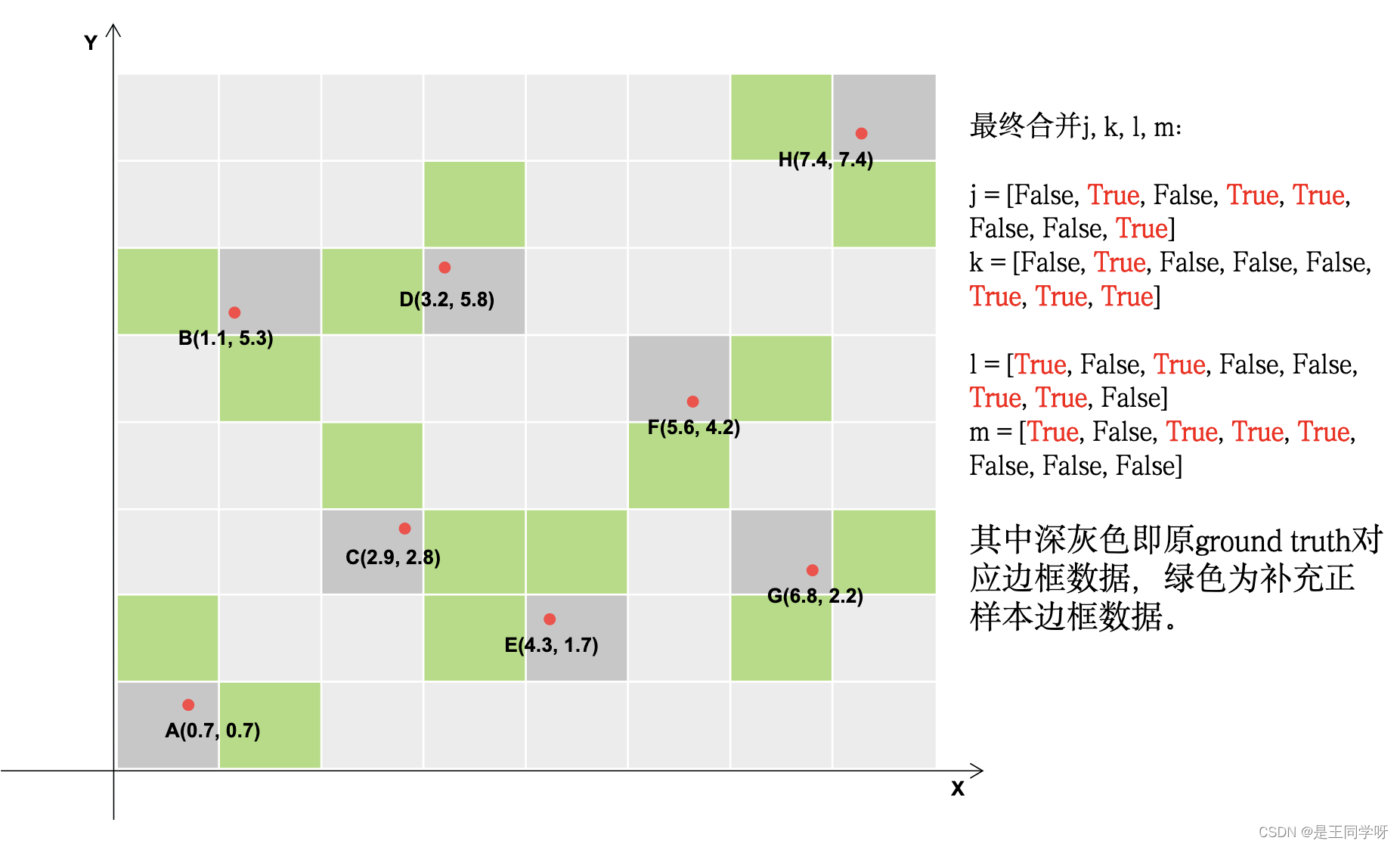
# Append,将对应的结果存储下来。
indices.append((b, a, gj.clamp_(0, gain[3]-1), gi.clamp_(0, gain[2]-1)))# image, anchor, grid indices
tbox.append(torch.cat((gxy - gij, gwh),1))# box
anch.append(anchors[a])# anchors
tcls.append(c)# class
tbox.append(torch.cat((gxy - gij, gwh), 1)) # box
这句话做的如下: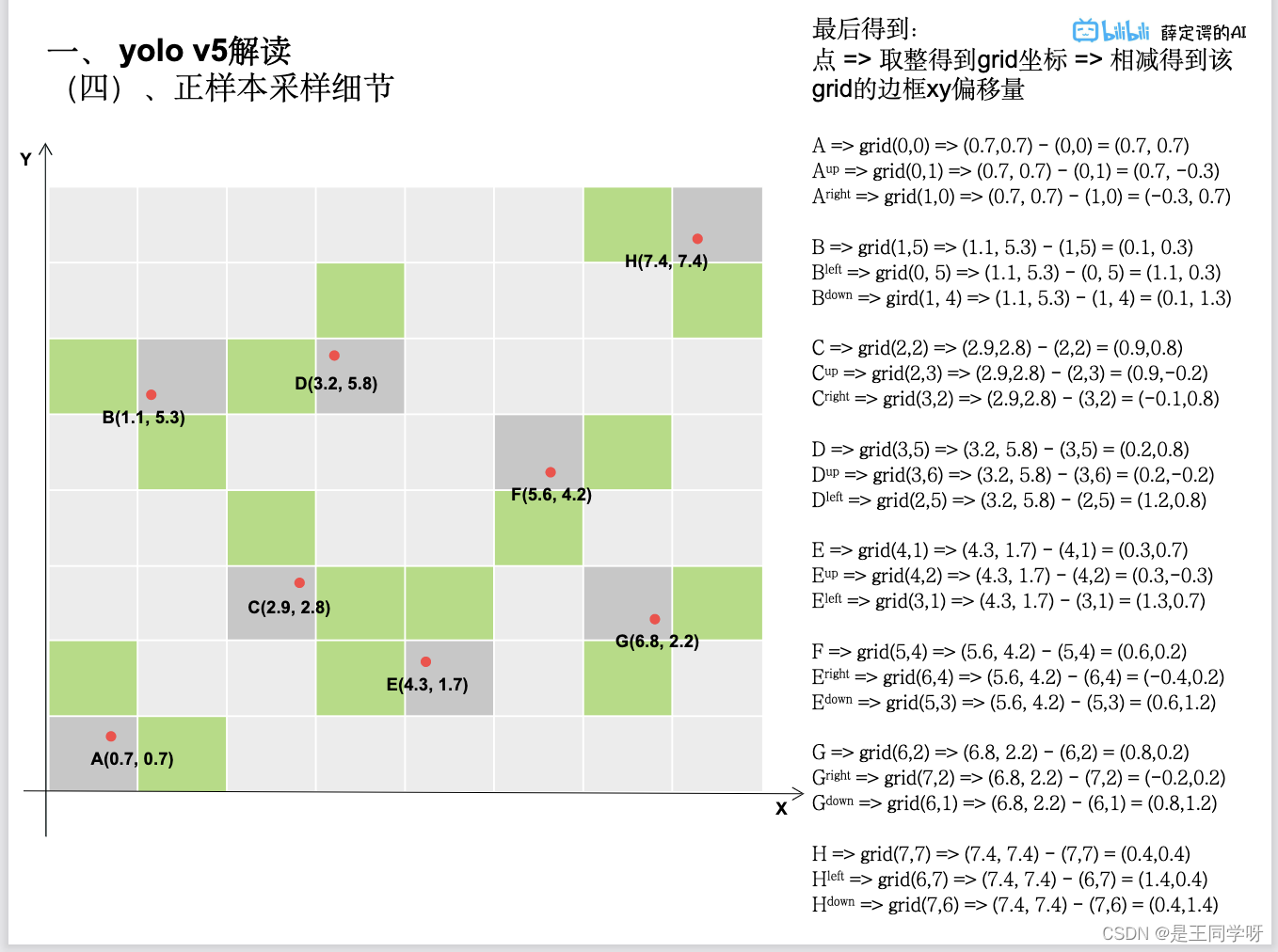
Reference
- 感谢这位UP主的详细解释,本文的正样本采样细节参考了此UP主的PPT。yolo v5 解读,训练,复现
版权归原作者 gorgeous(๑><๑) 所有, 如有侵权,请联系我们删除。