
目录
0. 目标
目标:把Solidworks的机器人模型导入Webots,保存运动副关系,导入后直接控制。所有操作都在win10环境进行。
思路:使用Solidworks - SW2URDF插件导出URDF文件,然后使用python - urdf2webots模组,生成proto文件导入Webots。
程序版本:Solidworks 2018 SP5.0(或更新), Webots R2023a,python模组urdf2webots V2.0.3,版本不兼容会导致错误。
提示:有坑,需仔细阅读正文。
1. SW导出URDF
Solidworks必须是2018 SP5.0或更新的版本,不然和插件不兼容。
下载并安装Solidworks插件SW2URDF:ROS.org网站链接,Github链接。
我是从Github下载的,注意里面根据Solidworks版本分了好几个,选择下载。第一个链接里也说明了SW的版本要求。
只下载exe文件就行,双击安装。如果安装的时候SW还开着,需要在安装后重启SW。
找到SW顶部一行的齿轮图标,点下拉菜单里的插件: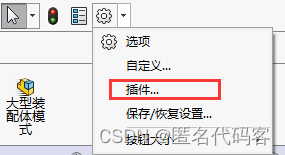
在插件窗口里面,滑动到底部,勾选SW2URDF插件: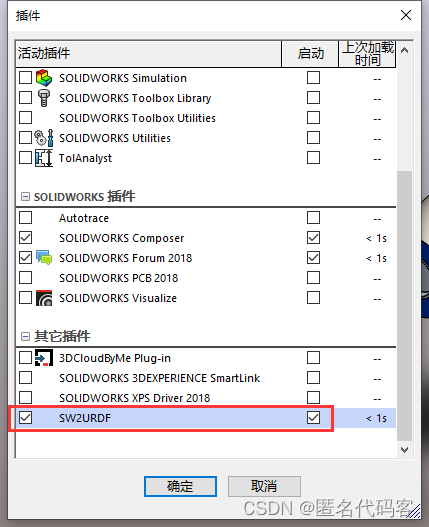
然后准备机器人装配体模型。我是从机械模型转换,原模型细节很多,需要简化,把内部轴承、电路板等看不到的零件都删掉,螺丝孔和其他不需要的特征也删掉,减小面数。
最后生成一个用来仿真的装配体: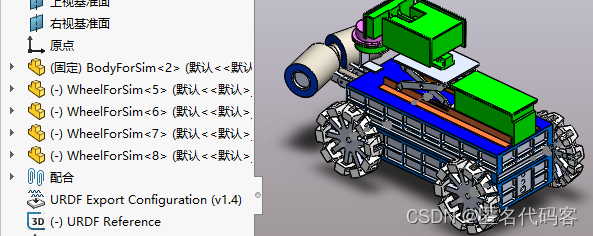
我的模型是很多零件装配而成的四轮小车,但对于仿真软件来说,整个机器人是一个机身和4个轮子,共5个刚体,联接而成的。所以我把每个刚体都另存为了SW零件,再组成整个机器人,条理清晰。没有试过用子装配体组成的模型导出,可能也行吧。
注意,装配体的原点需要定在机器人根部件上,如果偏的太远,可能会影响后面仿真。
怎么调节机器人相对原点的位置:先把根部件取消固定,然后在机器人和三个基准面之间添加配合,以此约束机器人的位置。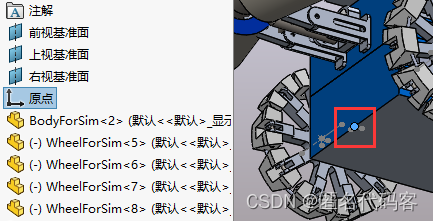
打开插件:SW顶部菜单栏>>工具>>File(在菜单最底下)>>Export as URDF:
然后设置机器人的运动副关系,看图: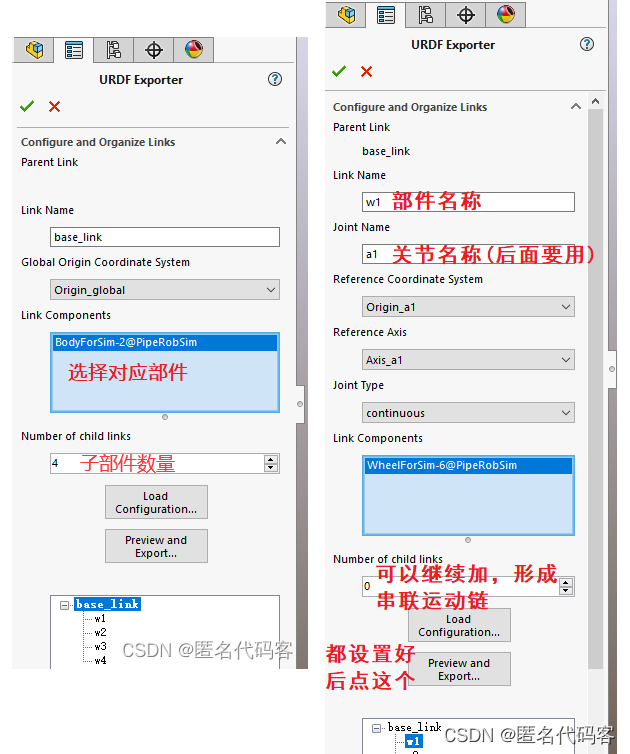
按照上图说明,弹出URDF导出窗口。
注意这时候插件会在SW里面自动生成运动副的坐标系和轴,之后就不要轻易改动装配体了,不然会导致转轴位置错误。
回到导出窗口,首先是关节属性,保持默认即可,点Next: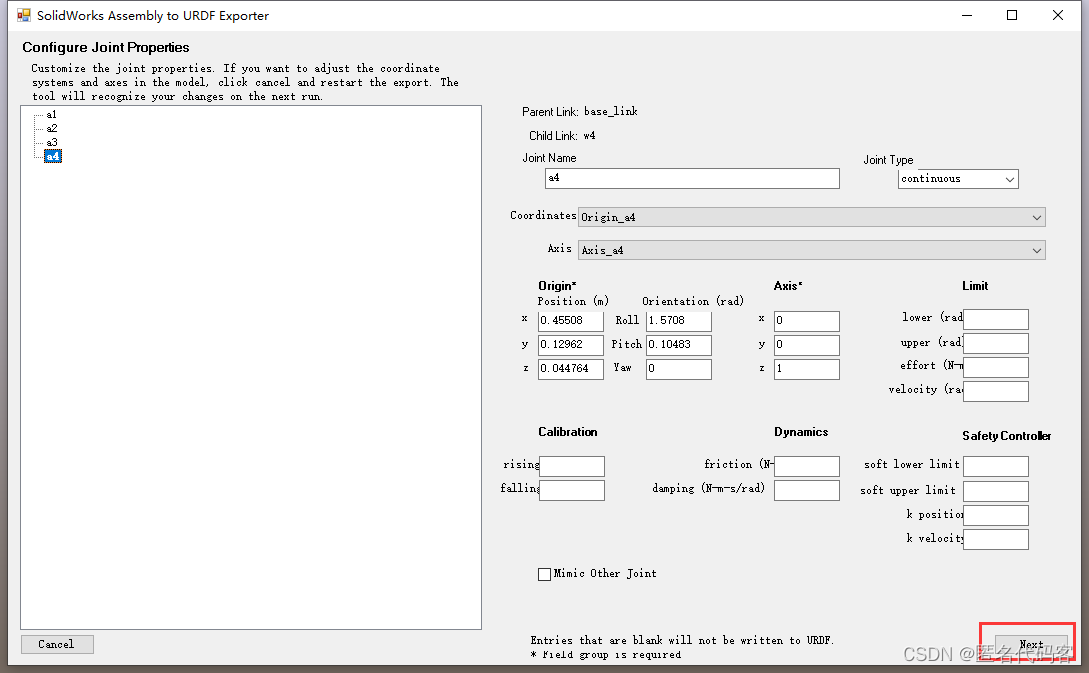
部件设置页面,参考下图说明:
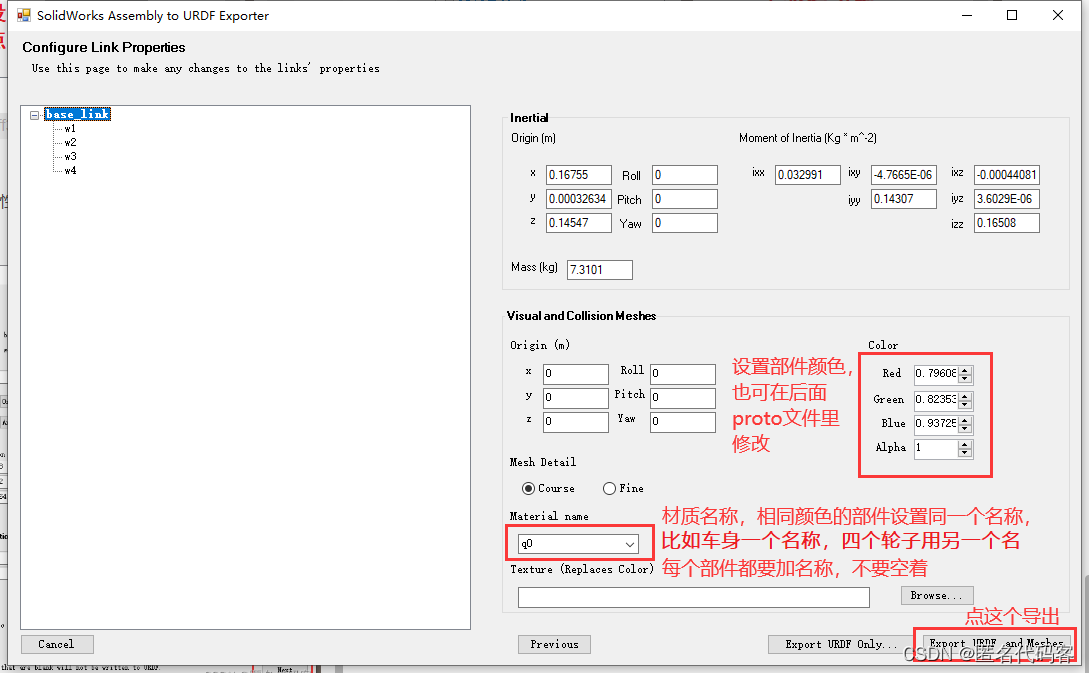
按照上图,最后导出的机器人,是每个部件一个颜色。上图右下有个"Texture"应该可以设置贴图然后实现彩色部件,还没研究怎么用。
导出时设置名称,不能以数字开头,整个路径和文件名都不能含中文,比如我的是“PipeRob6DOF”,导出后会生成一个同名文件夹,里面有几个子文件夹,存放URDF文件和各种模型资源:
2. 新建Webots工程
Webots版本采用R2023a,根据引导,新建项目目录和世界(world),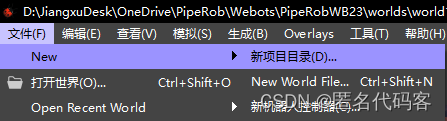
勾选“Add a rectangle arena”,即生一个平台,方便后面测试。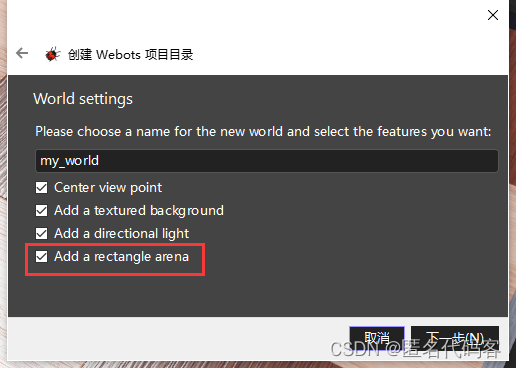
3. URDF转proto
转换工具是python环境下的urdf2webots模组,需要电脑已经安装了python(我的是python 3)。
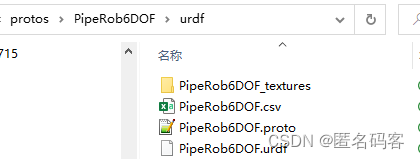
在Webots项目文件夹里,有个protos文件夹,把前面SW导出的“PipeRob6DOF”文件夹放进去。
进入PipeRob6DOF/urdf子文件夹,可以看到里面有一个PipeRob6DOF.urdf。按Shift+右键,在此处打开PowerShell窗口(等同于cmd窗口):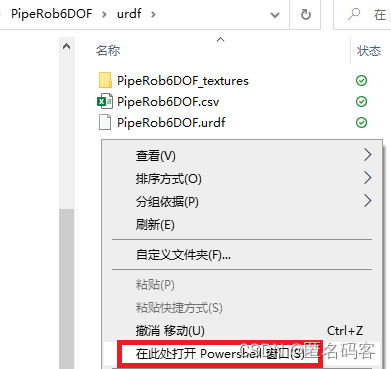
首次使用,需安装python的urdf2webots模组,执行以下命令:
pip install urdf2webots
这样会安装最新版(V2.0.3),本文介绍的是V2新版用法。模组V1版本用法是不一样的,具体可参考另一篇文章或模组官网。
输入以下命令,由urdf文件生成proto文件:
python -m urdf2webots.importer --input=PipeRob6DOF.urdf
由于我们是在urdf文件所在位置打开的命令窗口,所以这里直接把PipeRob6DOF.urdf作为输入参数,不需要冗长的路径。读者需要把上面“PipeRob6DOF”改成自己的机器人名称。
运行成功的话会返回机器人部件数量和关节数量,同时生成一个proto文件。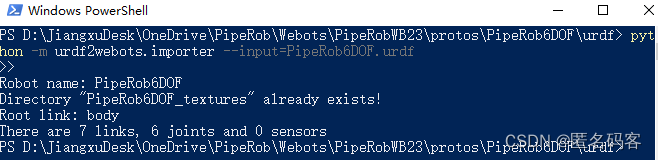
proto文件是Webots采用的一种文件格式,可以理解为“预设”,实现仿真世界中机器人或模型的复用。
一个proto文件本质上就是文本文档,里面定义了机器人的组成结构,各个部件的属性,以及网格模型链接。
采用python模组生成的proto文件存在一些缺陷,用Notepad++或记事本打开proto文件,然后:
(1)修正STL路径格式错误(必做):按Ctrl+H调用替换窗口,把所有 \ 替换为 / ;
(2)把STL文件改为相对路径(可选),以便在其他电脑上运行。比如原本是:
url "D:/JiangxuDesk/OneDrive/PipeRob/Webots/PipeRobWB23/protos/PipeRob6DOF/meshes/body.STL"
替换为:
url "../meshes/body.STL"
(3)设置部件颜色:搜索baseColor,可以看到SW导出时,所定义的各种材料的颜色定义,是取值0-1的RGB。
修改完成后保存,可以暂时不用关闭。后面重新修改保存后,在Webots里重新载入场景,可以随时调整。
4. proto文件导入Webots
Webots里面点工具栏加号: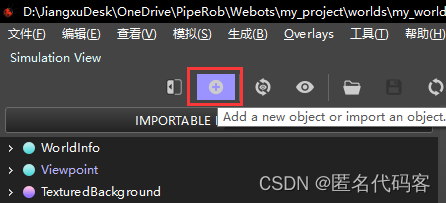
Webots会读取项目目录protos文件夹里所有的proto文件,不出意外会显示前面导出的机器人名称: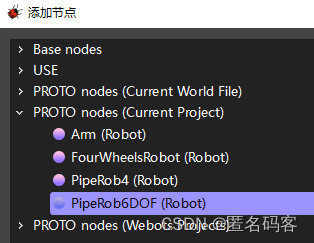
机器人就进来了。如果导入错误会在Console提示。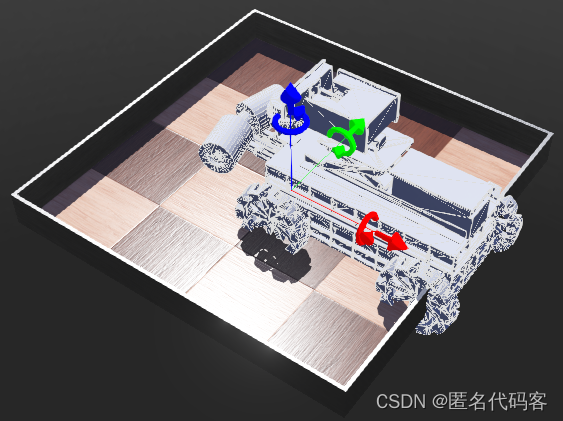
调整地板大小和机器人的位置(避免干涉),保存之后开始仿真(Webots操作我就不介绍了),可以看到机器人重力作用下掉到地板上了:
上图中小车是全白的。根据前文,在proto文件里搜索baseColor的地方设置各个部件颜色,保存后重新载入场景: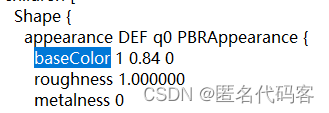
可见颜色更新了: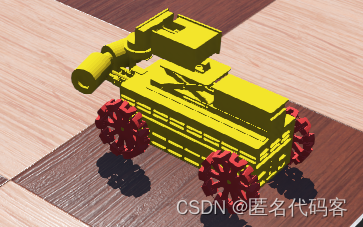
5. 控制机器人
Webots里新建一个C语言的控制器,进行编程:
/*
* File: my_controller.c
* Date:
* Description:
* Author:
* Modifications:
*//*
* You may need to add include files like <webots/distance_sensor.h> or
* <webots/motor.h>, etc.
*/
#include <webots/robot.h>
#include <webots/motor.h>/*
* You may want to add macros here.
*/
#define TIME_STEP8//using namespace webots;/*
* This is the main program.
* The arguments of the main function can be specified by the
* "controllerArgs" field of the Robot node
*/intmain(int argc,char**argv){/* necessary to initialize webots stuff */// 实现差速转向效果,需要在WorldInfo里面设置forceDependentSlip > 0.wb_robot_init();WbDeviceTag mot[4];char mot_names[4][3]={{"a1"},{"a2"},{"a3"},{"a4"}};for(int i=0;i<4;i++){
mot[i]=wb_robot_get_device(mot_names[i]);wb_motor_set_position(mot[i],INFINITY);// wb_motor_set_velocity(mot[i], 4);}float v =4;wb_motor_set_velocity(mot[0],-v);wb_motor_set_velocity(mot[1],-v);wb_motor_set_velocity(mot[2], v);wb_motor_set_velocity(mot[3], v);/*
* You should declare here WbDeviceTag variables for storing
* robot devices like this:
* WbDeviceTag my_sensor = wb_robot_get_device("my_sensor");
* WbDeviceTag my_actuator = wb_robot_get_device("my_actuator");
*//* main loop
* Perform simulation steps of TIME_STEP milliseconds
* and leave the loop when the simulation is over
*/int t =0;while(wb_robot_step(TIME_STEP)!=-1){
t+=TIME_STEP;/*
* Read the sensors :
* Enter here functions to read sensor data, like:
* double val = wb_distance_sensor_get_value(my_sensor);
*//* Process sensor data here *//*
* Enter here functions to send actuator commands, like:
* wb_motor_set_position(my_actuator, 10.0);
*/};/* Enter your cleanup code here *//* This is necessary to cleanup webots resources */wb_robot_cleanup();return0;}
控制器里面,先获取电机,电机名称就是导出URDF的时候,设置的关节名称。然后把位置设置为无穷大,再设置一个速度,让它一直跑。
编译控制器,把控制器赋给机器人,开始仿真。如果一切正常,机器人会开始运动。如果不稳定,可以把仿真周期调小。
6. 添加传感器
要给机器人添加测距仪、相机等传感器,可参考:Webots中给proto格式机器人添加传感器
参考:
将solidworks装配体模型导入webots并进行控制
利用插件将solidworks模型转化为URDF文件,再转化为proto文件并导入Webots
版权归原作者 匿名码客 所有, 如有侵权,请联系我们删除。