
绝对位置编码
Vit采用绝对位置编码的形式,也就是使用一个值来表征每个patch的绝对位置,并且基于可学习的方式,一般的定义方式为:
absolute_pos_embed = nn.Parameter(torch.zeros(1, num_patches, embed_dim))
trunc_normal_(absolute_pos_embed, std=.02)
将得到的position encoding直接加到输入的patch embedding就可以了:
x = x + self.absolute_pos_embed
相对位置编码
Swin transformer中采用了相对位置编码的概念,考虑query和key的相对位置进行编码。
具体的详解参考:https://blog.csdn.net/qq_37541097/article/details/121119988
这里的Relative Position Bias是加到self-attention的similarity矩阵计算的时候,而不是patch embedding,且在每层的self-attention计算时候都使用,具体的公式为:
A
t
t
e
n
t
i
o
n
(
Q
,
K
,
V
)
=
S
o
f
t
M
a
x
(
Q
K
T
d
+
B
)
V
{\rm Attention}(Q,K,V)={\rm SoftMax}(\frac{QK^{T}}{\sqrt{d}}+B)V
Attention(Q,K,V)=SoftMax(dQKT+B)V
这里
B
B
B是Relative Position Bias。如下图,假设输入的feature map高宽都为2,那么首先我们可以构建出每个像素的绝对位置(左下方的矩阵),对于每个像素的绝对位置是使用行号和列号表示的。比如蓝色的像素对应的是第0行第0列所以绝对位置索引是( 0 , 0 ) (0,0)(0,0),接下来再看看相对位置索引。首先看下蓝色的像素,在蓝色像素使用q与所有像素k进行匹配过程中,是以蓝色像素为参考点。然后用蓝色像素的绝对位置索引与其他位置索引进行相减,就得到其他位置相对蓝色像素的相对位置索引。例如黄色像素的绝对位置索引是( 0 , 1 ) (0,1)(0,1),则它相对蓝色像素的相对位置索引为( 0 , 0 ) − ( 0 , 1 ) = ( 0 , − 1 ) (0, 0) - (0, 1)=(0, -1)(0,0)−(0,1)=(0,−1),这里是严格按照源码中来讲的,请不要杠。那么同理可以得到其他位置相对蓝色像素的相对位置索引矩阵。同样,也能得到相对黄色,红色以及绿色像素的相对位置索引矩阵。接下来将每个相对位置索引矩阵按行展平,并拼接在一起可以得到下面的4x4矩阵 。
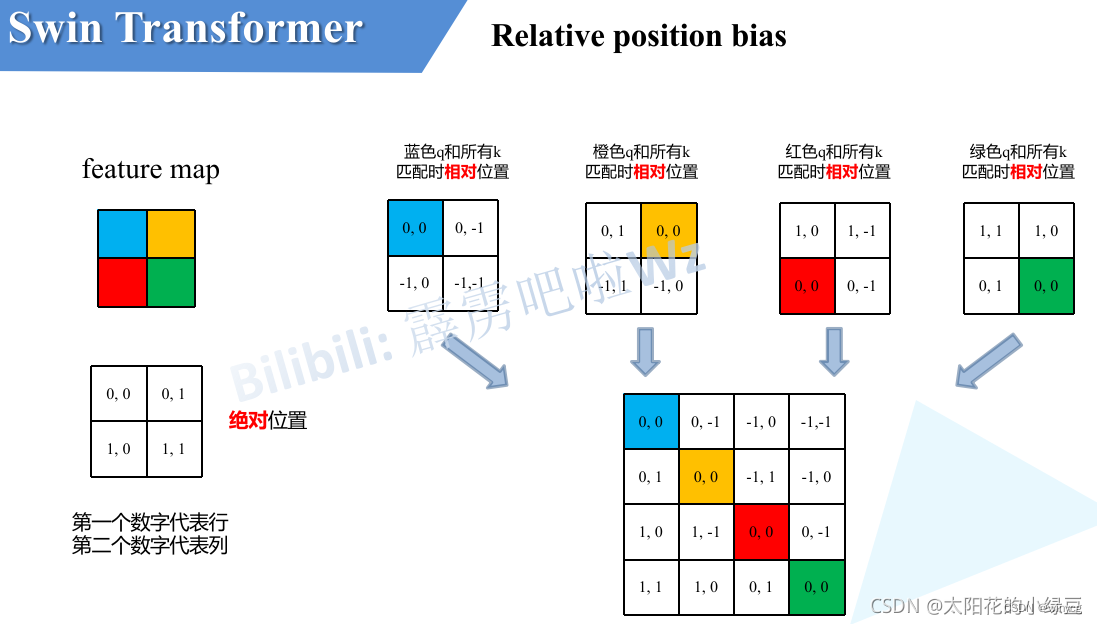
实现代码如下:
>>> coords_h = torch.arange(2)>>> coords_w = torch.arange(2)>>> coords = torch.stack(torch.meshgrid([coords_h, coords_w]))# 2, Wh, Ww>>> coords_flatten = torch.flatten(coords,1)# 2, Wh*Ww>>> coords_flatten
tensor([[0,0,1,1],[0,1,0,1]])>>> relative_coords = coords_flatten[:,:,None]- coords_flatten[:,None,:]# 2, Wh*Ww, Wh*Ww>>> relative_coords
tensor([[[0,0,-1,-1],[0,0,-1,-1],[1,1,0,0],[1,1,0,0]],[[0,-1,0,-1],[1,0,1,0],[0,-1,0,-1],[1,0,1,0]]])>>> relative_coords = relative_coords.permute(1,2,0).contiguous()# Wh*Ww, Wh*Ww, 2
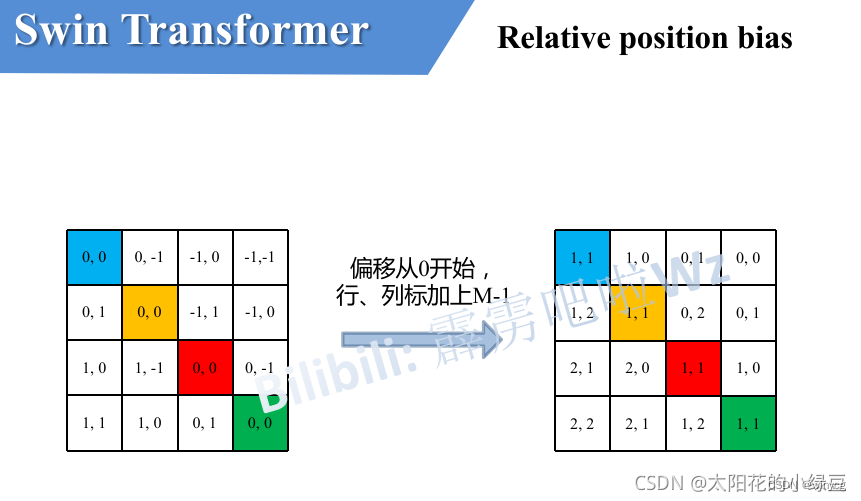
请注意,我这里描述的一直是相对位置索引,并不是相对位置偏执参数。因为后面我们会根据相对位置索引去取对应的参数。比如说黄色像素是在蓝色像素的右边,所以相对蓝色像素的相对位置索引为( 0 , − 1 ) (0, -1)(0,−1)。绿色像素是在红色像素的右边,所以相对红色像素的相对位置索引为( 0 , − 1 ) (0, -1)(0,−1)。可以发现这两者的相对位置索引都是( 0 , − 1 ) (0, -1)(0,−1),所以他们使用的相对位置偏执参数都是一样的。但在源码中作者为了方便把二维索引给转成了一维索引。由于索引的值范围为
[
−
M
+
1
,
M
−
1
]
[-M+1,M-1]
[−M+1,M−1],原始的相对位置索引上加上
M
−
1
M-1
M−1,使得索引的值大于等于0,变为
[
0
,
2
M
−
2
]
[0,2M-2]
[0,2M−2]。
接着将所有的横坐标标都乘上
2
M
−
1
2M-1
2M−1,方便之后横坐标和纵坐标求和之后的索引的独一性。
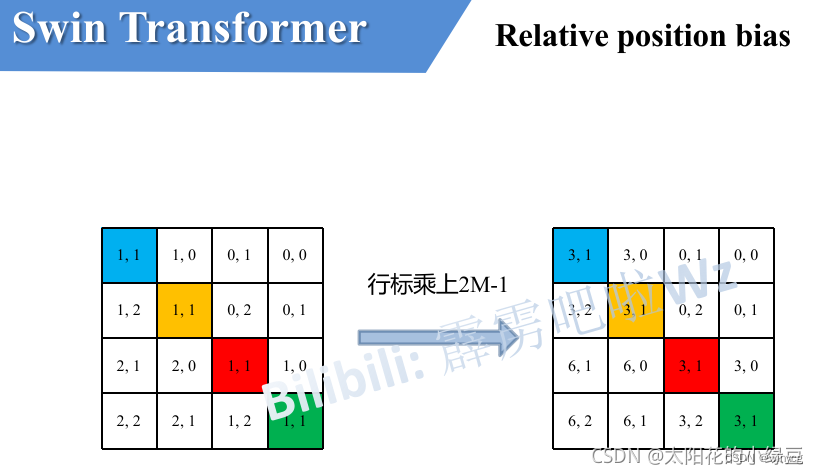
最后将行标和列标进行相加,得到独一的一维的索引。
>>> M=2>>> relative_coords[:,:,0]+= M -1>>> relative_coords[:,:,1]+= M -1>>> relative_coords[:,:,0]*=2* M -1>>> relative_position_index = relative_coords.sum(-1)>>> relative_position_index
tensor([[4,3,1,0],[5,4,2,1],[7,6,4,3],[8,7,5,4]])
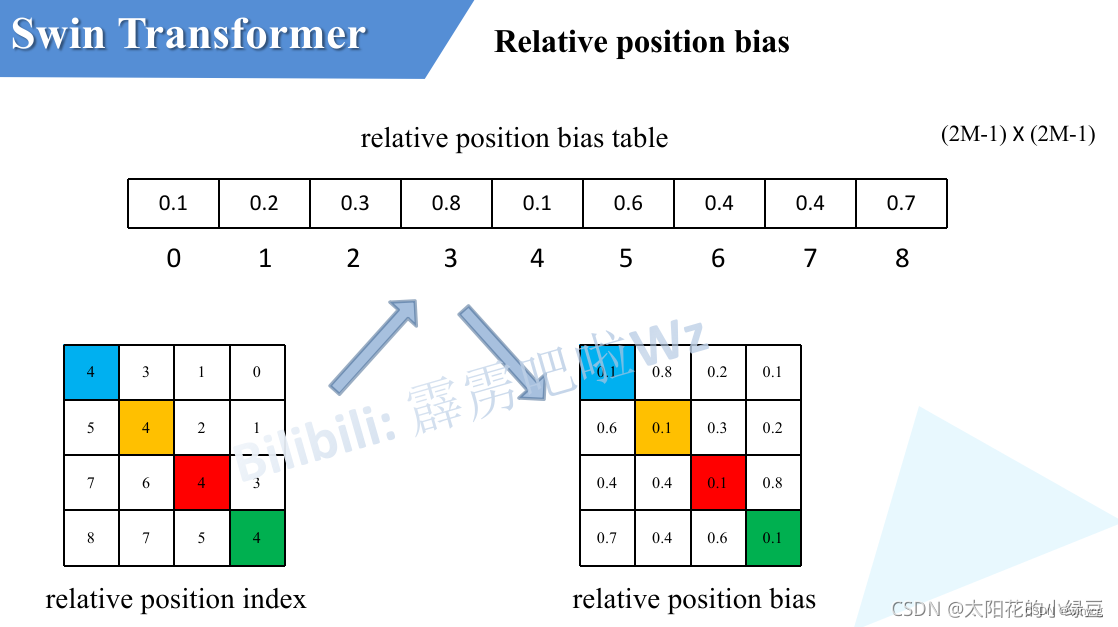
之前计算的是相对位置索引,并不是相对位置偏执参数。真正使用到的可训练参数
是保存在relative position bias table表里的,这个表的长度是等于
(
2
M
−
1
)
×
(
2
M
−
1
)
(2M-1)\times (2M-1)
(2M−1)×(2M−1)的。那么上述公式中的相对位置偏执参数B是根据上面的相对位置索引表根据查
relative position bias table
表得到的,如下图所示。
Swin transformer的ablation study: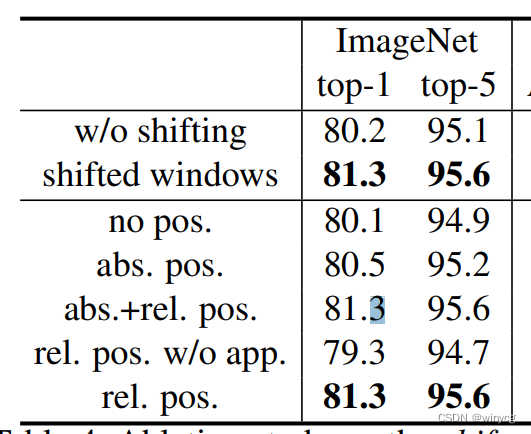
绝对编码 (absoluate position)能提升性能,但是效果不如相对编码(relative position),仅仅是相对编码的效果等价于相对编码+绝对编码
版权归原作者 winycg 所有, 如有侵权,请联系我们删除。