
PID控制器简介


1.比例调节P

- 比例调节对系统的干扰具有及时二有力的抑制作用:比例值越大,扰动作用下的余差越小,系统抑制干扰的能力越强。
- 自平衡被控对象比例控制器存在稳态偏差,控制器的比例值越大,控制系统的稳态误差越小,但比例控制系统总存在稳态偏差,不能做无静差调节
- 非自平衡被控对象比例控制器不存在稳态偏差。
- 比例调节的余差随着比例值的增加而减小。为了减小余差,应尽可能的增加比例值。但是增加比例值等于加大系统的开环增益,可能导致系统振荡加剧,甚至不稳定。
- 随着比例增益的增大,即比例带的缩小,系统的稳定性变差,甚至不稳定。从物理含义来讲,比例带很大程度上意味着调节阀的动作幅度很小,被控量的变化比较平稳,但系统余差比较大,调节时间也较长;减小比例带,则加大了调节阀的动作幅度,引起被控量来回波动,系统余差响应减小;比例控制存在一个临界的比例带,此时系统为等幅震荡。
2.积分调节I

- 只要被调量存在偏差,积分控制器的输出就会随着时间不断增加,输出累加
- 当偏差为0时,控制器才会停止积分,保持一定的输出值不变,积分具有记忆功能
- 积分输出在偏差为0时,输出将停在新的位置而不复原位,保持静差为0,对干扰有及时而有力的抑制作用,能够消除偏差
- 积分控制使过渡过程的动作迟缓,动态品质变坏,过渡时间延长,甚至造成系统不稳定
- 增大Ki将会降低控制系统的稳定性,Ki增大到一定值时输出响应发散导致系统不稳定。
3.比例积分调节PI
- 当系统出现偏差,立即由比例控制输出,曲线跳跃而上粗调,然后积分控制作用逐渐增加输出,以消除偏差,微调。
- 比例积分控制器可以看成时比例增益随偏差时间不断调整的比例控制器,随着时间的推移,比例积分控制的余差越来越小,直到余差为0,另外当比例增益越来越大时,系统的稳定性变差
- 在比例值Kp不变时,减小积分时间常数Ti,系统的积分作用增强,响应的衰减比减小,振荡加剧,超调量增大。
- 积分作用除了消除系统余差的同时,也降低了系统的振荡频率,使响应速度变慢
- PI调节引入积分消除系统余差的同时,有人降低了系统的稳定性,特别是当Ti比较小时,稳定性下降比较严重。为保持控制系统原有的衰减率,PI调节器的比例带必须适当加大。
4. 比例微分PD
- 微分作用反映系统偏差信号的变化率,具有预见性,能预见偏差变化的趋势,因此能产生超前的控制作用。
- 比例微分调节是有差的。在稳态时,微分部分输出为0,PD调节变为P调节
- 微分作用要合适,微分反映变化率,可使系统动态特性改善,减小系统的超调量,减小调节时间。但微分作用过强,可能导致系统稳定性变差。
- 微分对噪声信号具有放大作用,因此过强的加大微分调节作用对系统抗干扰不利
- 对于大时滞系统,微分控制不能改善系统品质。
5. PID控制
- 比例控制P是最基本的控制,在整个过程中均起作用,微分D控制在前期起作用,积分控制I在后期起作用
- PD调节器作用下系统的动态偏差最小,由于有微分作用,可使比例增益增大,调节时间大大缩短,但因无积分作用,系统仍有余差,只是比例增益增大,余差只是比例调节的一半左右。
- PID调节,系统动态最大偏差比PD调节稍差,但由于积分作用,系统无余差,但由于积分作用,使系统的振荡周期增长了。可对积分项限幅,PID输出限幅。
6. 数字式PID控制器的实现
(1)位置式PID
位置式PID的特点:比例部分输入为目标值和实际值的差值。
- 形式1):为主要
其中****为PID的输入,是设定值与实际值的差,
为PID的输出,此式中即控制量。
- 形式2):每次的PID输出都加上一个定值作为控制量
- 形式3):每次的PID的输出作为控制量的增量
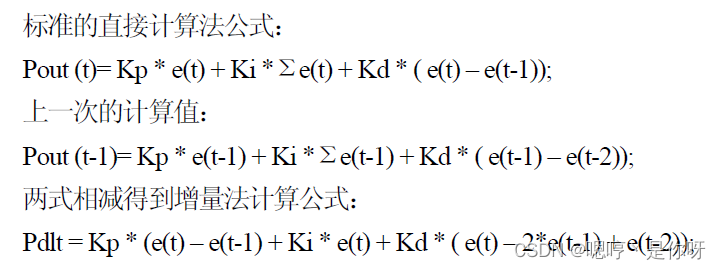
(2)增量式PID
增量式PID的特点:比例部分输入为 上次目标值和实际值的差值 和 本次目标值和实际值的差值 的差值。
(3)速度式PID


增量式PID控制算法的应用最为广泛。位置式PID存在积分饱和现象,但是增量式PID和速度式不会出现积分饱和,即使偏差长期存在,每次的输出是限幅的,不会超过上下限,执行器达不到极限位置。
7.改进式PID:
- 积分分离PID
在理想PID 控制算法中,积分的主要目的是为了消除静差,提高系统的控制精度。但在过程的启停或大幅度增减设定值时,由于短时间内出现的大偏差,会造成PID 算法的积分累积,引起系统较大的超调,甚至导致系统大的振荡,为此,可采用积分分离PID控制算法。当系统的偏差较大时,取消积分作用,一面由于积分作用使系统的稳定性降低,超调量增大,直至偏差小于一定值后,才引入积分控制,以消除系统的静差,提高系统的控制精度。
- 抗积分饱和PID算法
在计算u(k)时,首先要判断上一时刻的控制量u(k-1)是否已超出限制范围,若u(k)>u(max),则只累加负偏差,否则只累加正偏差,这样可以避免控制量长时间停留在饱和区。
- 梯形积分PID控制算法
理想PID 控制算法中积分的作用是消除余差。为减小余差,应提高积分项的运算精度,为此可将矩形积分改为梯形积分。
- 变速积分PID控制
在理想PID控制算法中,由于积分系数Ki是常数,所以系统在整个过程中,积分增量不变。而系统对积分项的要求是,系统偏差大时积分作用应减弱甚至消除,而在偏差小时积分作用应加强。变速积分PID控制的思想是设法改变积分项的累加速度,使其与偏差大小相对应:偏差越大,积分越慢;偏差越小,积分越快。
- 微分先行PID控制算法
微分可以改善系统的动态特性,但同时也容易引起高频干扰,在偏差信号突变时尤其显出微分的不足。微分先行PID控制的思想是只对系统的输出变量y进行微分,而对给定值r不进行微分。这样的话,在改变给定值时,由于输出变化比较缓和,所以不致引起系统较大的振荡。
- 比例先行I-PID控制算法
针对y,为标准的PID运算,针对r,仅仅为积分运算。
- 带有死区的PID调节器
一旦计算出的控制量u(k)进入饱和区,一方面对输出量输出值限幅;另一方面增加判别程序,算法中只执行削弱积分饱和项的积分运算,而停止增大积分饱和项的运算。在控制精度要求不高的场合,能减少由于频繁动作引起的振荡和能量消耗。
8.PID整定
在PID控制中,比例度过小时,即比例放大系数过大时,比例控制作用很强,系统有可能产生振荡;积分时间常数过小时,积分控制作用很强,易引起振荡;微分时间常数过大时,微分控制作用过强,易产生振荡。另外,比例作用是最基本的控制作用,积分作用消除余差,微分作用预测控制,但对高频噪声不利。
- 参数整定
整定参数:比例度&、积分时间常数Ti、微分时间常数TD、采样周期
整定方法:现场试凑法、动态特性参数法、临
9. PID与其他控制方法相结合:
- (1)模糊控制
- (2)自适应控制
- (3)滑模(变结构)控制
- (4)不完全微分的模糊PID
- (5)神经网络
- (6) 粒子群算法优化PID参数
- (7)鲁棒控制
- (8)线性二次型最优控制
- ……
版权归原作者 嗯哼丶是你呀 所有, 如有侵权,请联系我们删除。