
你是否曾经训练过一个模型,在评估指标上表现出色,但在实际可视化边界框时,却发现它在许多情况下都失败了?这可能是因为像简单交并比(IoU)这样的标准指标并没有很好地捕捉到你所期望的模型行为。
简单的IoU在当前阶段已经显得有些过时了。
IoU作为一个评估指标可能还算不错,尽管它仍然存在一些问题。但重要的是,其实已经有很多更新、更智能的指标。让我们来看看其中的几个,这样你可能就会重新考虑是否要在模型训练、评估和推理中继续使用IoU这个过时的指标。
为什么IoU很重要
在目标检测任务中,IoU指标实际上贯穿于模型开发的每个阶段:
- 评估阶段:在评估模型性能时,通常使用IoU指标将预测边界框与真实边界框进行比较。
- 训练阶段:在优化模型定位能力时,IoU指标的可微分版本常被用作回归损失函数。
- 推理阶段:在推理过程中,非极大值抑制(NMS)通常被用来处理同一目标被预测出多个边界框的问题。为了解决这个问题,需要比较两个预测框,如果它们的IoU很高,就丢弃置信度较低的那个框。
最近的一些进展,如Yolo-V10和类DETR模型中的"无NMS"训练策略,设法避免了第三种情况。但是第一种和第二种用例在未来可能仍将继续存在。
所以IoU是非常重要的,那么如何能够提高他的效果呢?让我们来看看这些IoU变体!
1、交并比(IoU)
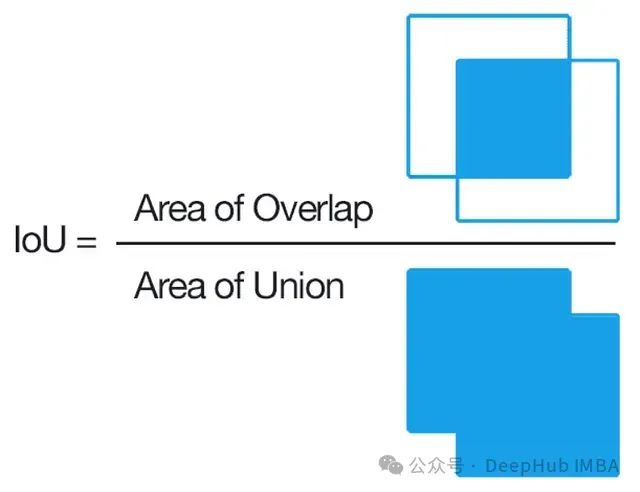
首先从基础开始——所谓的交并比究竟是什么?
这是目标检测领域的首选评估指标。计算两个边界框的IoU时,如果它们有重叠区域,就测量重叠面积,然后除以两个框所覆盖的总面积。
下面是与上图相对应的代码:
defiou(boxA, boxB):
xA=max(boxA[0], boxB[0])
yA=max(boxA[1], boxB[1])
xB=min(boxA[2], boxB[2])
yB=min(boxA[3], boxB[3])
# Compute the area of intersection rectangle
interArea=max(0, xB-xA) *max(0, yB-yA)
# Compute the area of both the prediction and ground-truth rectangles
boxAArea= (boxA[2] -boxA[0]) * (boxA[3] -boxA[1])
boxBArea= (boxB[2] -boxB[0]) * (boxB[3] -boxB[1])
# Compute the IoU
iou=interArea/float(boxAArea+boxBArea-interArea)
returniou
IoU简单且在许多情况下都适用,但它也有缺陷。比如说当两个框很好地重叠时,它的效果不错;但如果两个框完全不重叠呢?那IoU就变成了零!
这种情况在小目标上经常发生,这也是为什么这个指标偏向于大目标的原因。正是IoU缺乏细微表达能力的问题,促使人们开发出了更复杂的变体。
2、广义交并比(GIoU)
当两个框不重叠时,IoU就失效了但如果我们能够度量不重叠的两个框之间的距离呢?
这就是广义IoU(GIoU)。GIoU不仅度量重叠面积,还通过考虑最小外接矩形框的面积来度量两个框之间的距离。
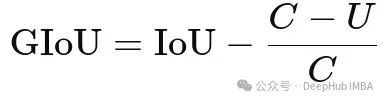
我们用C表示包围两个框的最小矩形框的面积。这样一来,即便是两个框没有重叠(常规IoU为零),GIoU仍然能够提供有价值的反馈,告诉我们预测框在尝试捕获目标方面的效果如何。这有助于我们改进模型训练,使其更适合评估。
GIoU能够提供对模型学习过程更深入的洞察,特别是在训练的早期阶段,因为早就其节点的模型的定位能力往往还很糟糕。
defgiou(boxA, boxB):
# Calculate IoU
iou_value=iou(boxA, boxB)
# Calculate the smallest enclosing box
xC_min=min(boxA[0], boxB[0])
yC_min=min(boxA[1], boxB[1])
xC_max=max(boxA[2], boxB[2])
yC_max=max(boxA[3], boxB[3])
# Area of the smallest enclosing box
enclosingArea= (xC_max-xC_min) * (yC_max-yC_min)
# Area of union
unionArea=boxAArea+boxBArea-interArea
# Calculate GIoU
giou=iou_value- (enclosingArea-unionArea) /enclosingArea
returngiou
3、距离交并比(DIoU)
为什么我们需要最小外接矩形框呢,难道不能直接度量两个框之间的距离吗?
在训练的初始阶段,使用DIoU作为损失函数可以帮助模型更快地改进定位能力,因为它为不重叠的框提供了更加明确的梯度信号。
DIoU在常规IoU的基础上,额外考虑了两个框中心点之间的欧氏距离
d
:
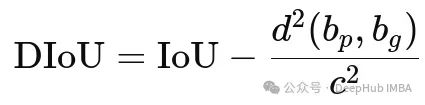
在DIoU的计算中,用
c
的平方(即包围两个框的最小外接矩形框的对角线长度的平方)对距离
d
进行归一化。
DIoU根据预测框中心与真实框中心之间的距离来惩罚预测结果。对于不重叠的两个框,DIoU损失会随着它们之间距离的平方而增大,而GIoU损失则有一定的饱和趋势。
这使得模型在处理不重叠框时能够更快地学习。但是,DIoU损失有时会导致梯度信号过于极端,从而导致权重更新幅度过大,尤其是在使用一些带噪声的标注分配算法(如DETR类模型中的匈牙利算法)时。
DIoU的另一个缺点在于,它过于关注两个框中心的距离,而忽略了框本身形状的差异。
究竟哪种损失函数最适合你呢,还是取决于具体的任务、数据和训练设置。建议都试一试,看看DIoU是否能给你带来更好的效果。
importnumpyasnp
defdiou(boxA, boxB):
# Calculate IoU
iou_value=iou(boxA, boxB)
# Center of boxA and boxB
centerA= [(boxA[0] +boxA[2]) /2, (boxA[1] +boxA[3]) /2]
centerB= [(boxB[0] +boxB[2]) /2, (boxB[1] +boxB[3]) /2]
# Distance between the centers
center_distance=np.linalg.norm(np.array(centerA) -np.array(centerB))
# Diagonal distance of the enclosing box
xC_min=min(boxA[0], boxB[0])
yC_min=min(boxA[1], boxB[1])
xC_max=max(boxA[2], boxB[2])
yC_max=max(boxA[3], boxB[3])
diagonal_distance=np.linalg.norm([xC_max-xC_min, yC_max-yC_min])
# Calculate DIoU
diou=iou_value- (center_distance**2) / (diagonal_distance**2)
returndiou
4、完全交并比(CIoU)
我们如何在DIoU的基础上同时优化两个框的形状差异呢?这就引出了CIoU。
这个"超级损失函数"集成了前面提到的各种IoU变体的优点。它类似于DIoU,但额外引入了一项用于惩罚长宽比差异的项。可以把CIoU看作是边界框回归任务的"终极Boss"!
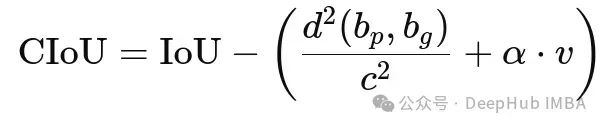
CIoU的公式,其中引入了两个新的项:
α
和
v
。
v
项度量了两个框的长宽比差异。它的定义相对复杂,但可以类比为一种广义上的欧氏距离。

α
是一个权重项,用于平衡IoU项和长宽比差异项。当预测框与真实框的重合度很低时,
α
会趋近于0,此时CIoU退化为DIoU;而当重合度较高时,
α
会趋近于1,此时CIoU会更多地考虑两个框的形状差异。
CIoU可能是当前最前沿的目标检测系统中使用的最复杂的IoU变体。它同时考虑了:
- 两个框中心点之间的距离(像DIoU一样)
- 两个框的形状/大小的相似程度
- 并通过权重项
α来平衡二者
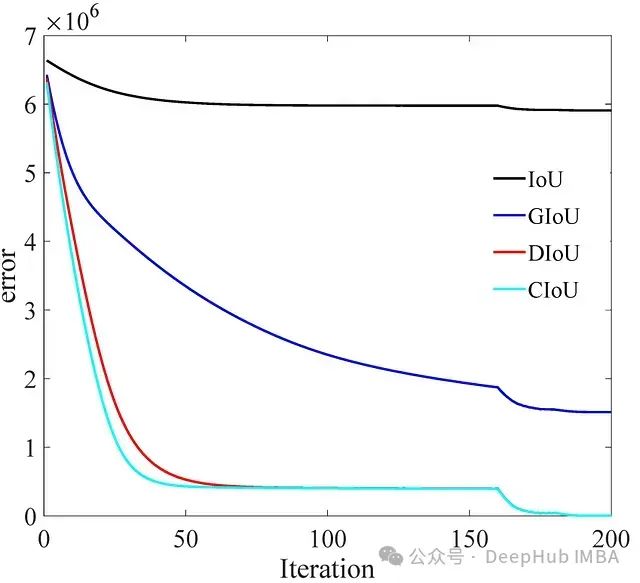
使用CIoU确实能够给我带来一些性能提升,但相比DIoU而言,提升幅度并不算太大。这也与最初提出DIoU和CIoU的论文《Distance-IoU损失》的实验结果基本一致。下图展示了他们在一个实验中使用不同IoU变体所得到的收敛曲线。
需要注意的是,为了提高训练稳定性,对于定位很差的预测框,我们通常将
α
项设为0。这样可以保证模型先专注于缩小两个框的距离,而不去过早地优化形状差异。
下面是一个PyTorch实现的CIoU损失函数:
defciou(boxA, boxB):
# Calculate DIoU
diou_value=diou(boxA, boxB)
iou_value=iou(boxA, boxB)
# Width and height of the boxes
widthA, heightA=boxA[2] -boxA[0], boxA[3] -boxA[1]
widthB, heightB=boxB[2] -boxB[0], boxB[3] -boxB[1]
# Aspect ratio penalty
v= (4/ (np.pi**2)) *np.power(np.arctan(widthA/heightA) -np.arctan(widthB/heightB), 2)
alpha=v/ ((1-iou_value) +v) ifiou_value>0.5else0
# CIoU calculation
ciou=diou_value+alpha*v
returnciou
总结
GIoU、DIoU和CIoU这三个变体都有各自的独到之处,它们在一定程度上弥补了普通IoU在处理不重叠、距离较远或形状差异较大的边界框时的不足。
这些新的指标不仅仅给出一个量化的分数,它们的各项组成部分还能告诉我们,预测结果好坏的原因究竟是什么。
虽然本文主要聚焦在训练阶段,但请注意,这些指标实际上可以用于所有三个场景:训练、评估和推理。所以建议在所有场合都使用CIoU,但在评估时,可能还需要一些时间来建立对其数值的直观理解。
当然最后还是我们一直说的那句话到底应该使用哪种IoU变体组合,还是要看你自己的实际情况!每个都试一试,一定不会有错的。
作者:Benjamin Bodner