
前言
NeRF从2020年发展至今,仅仅三年时间,而Follow的工作已呈井喷之势,相信在不久的将来,NeRF会一举重塑三维重建这个业界,甚至重建我们的四维世界(开头先吹一波)。NeRF的发展时间虽短,有几篇工作却在我研究的领域开始呈现万精油趋势:
- PixelNeRF----泛化法宝
- MipNeRF----近远景重建
- NeRF in the wild----光线变换下的背景重建
- Neus----用NeRF重建Surface
- Instant-NGP----多尺度Hash编码实现高效渲染
Abstract
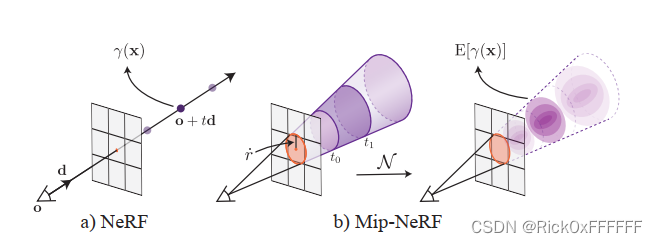
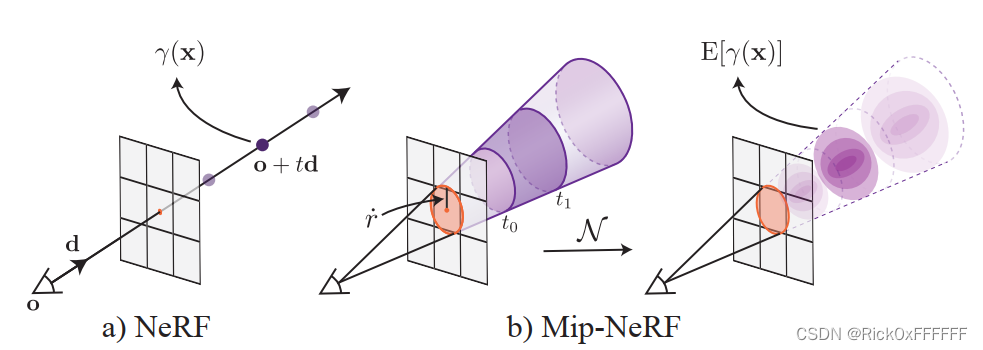
由于远景近景的分辨率不同,导致经典NeRF对于多尺度场景的表达存在明显瑕疵:NeRF对于近景的重建比较模糊而对于远景的重建出现锯齿。简单粗暴的策略是supersampling,但是费时费力。相较于NeRF使用的位置编码(PE)方式,Mip-NeRF提出了积分位置编码的方式(IPE).这种编码方式可以多尺度地描述空间中的信息分布,make sense.
NeRF
Positional Encoding:
MLP:
Final Predicted Color of the Pixel:
Loss Function:

其中是根据coarse modelinferene出的
经过inverse transform sampling求解出的。
Mip-NeRF
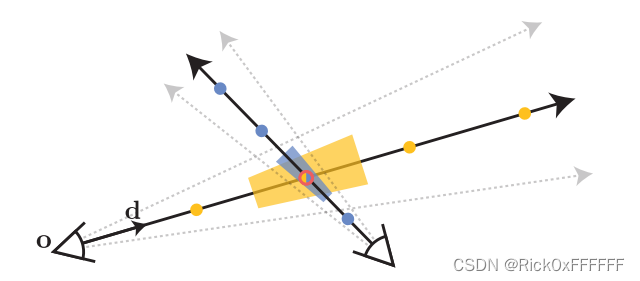
NeRF通过point-sampling的方式对每个像素-->所对应的射线进行位置编码,而忽略了每个采样点所包含的Shape, Volume等信息。
这导致了图中所示交汇处的黄点与蓝点会inference出相似的point-sampled feature. Mip-NeRF企图对Shape, Volume进行编码解决NeRF这一困境。
MipNeRF对一段ray所代表的锥台区域的定义如下:
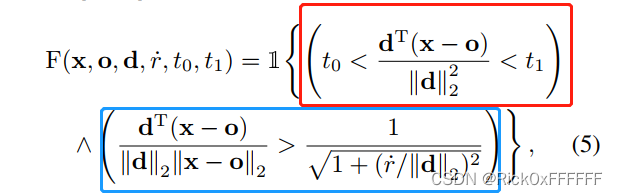
红框部分图示如下:
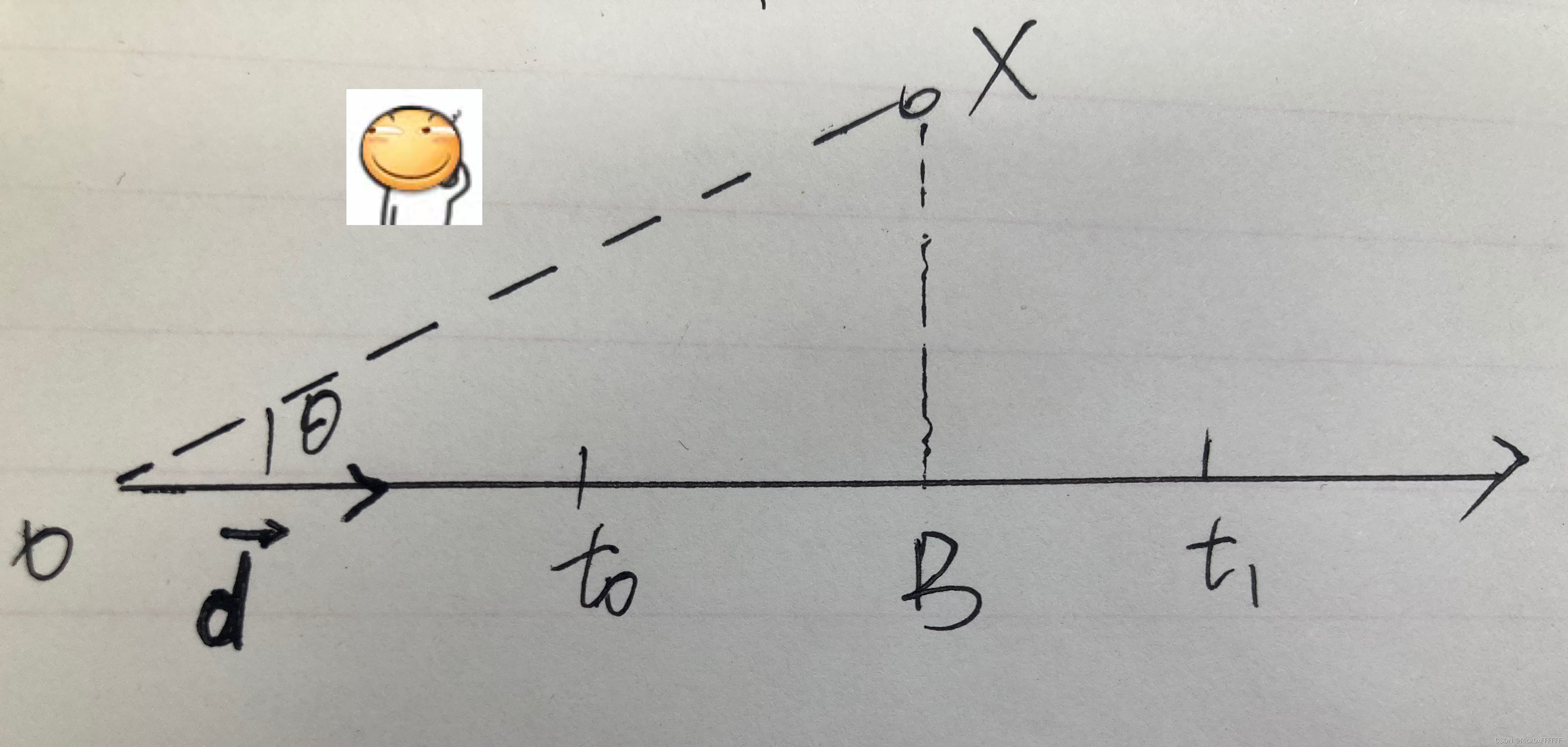
OB即为红框中间部分求解结果,在之间
分别代表蓝框右式和左式。
期望位置编码为:

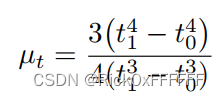
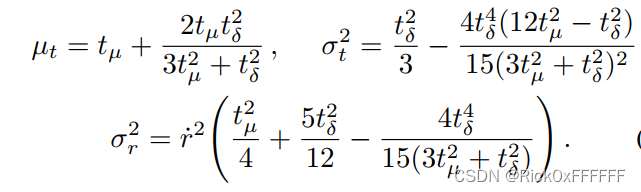
但这个公式没有闭式解,作者转而利用多元高斯求近似值,那就是求解. 因为锥台是关于ray对称的,因此期望值应该在ray上,关于期望position,只需要求解ray上的期望distance,令其为
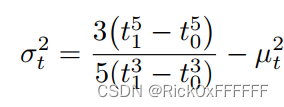
. 以及沿ray线的
,以及垂直于ray的圆面所对应的
.
先给结论,公式推导见公式推导章节:
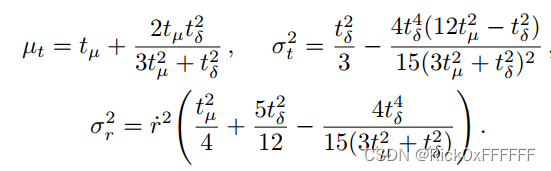
将均值与方差从锥台坐标系转换到世界坐标系下:

进行Positional Encoding, 令:
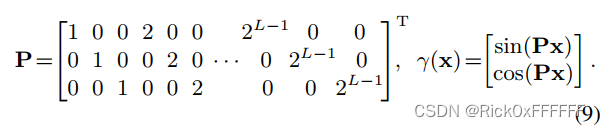
and

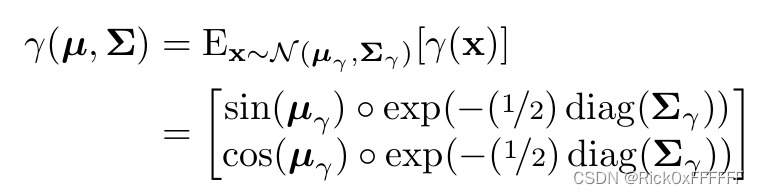
根据下式可求解IPE闭式解:

最后得到的IPE编码为:
公式推导:
下面来说(,
,
)分别是怎么求解的
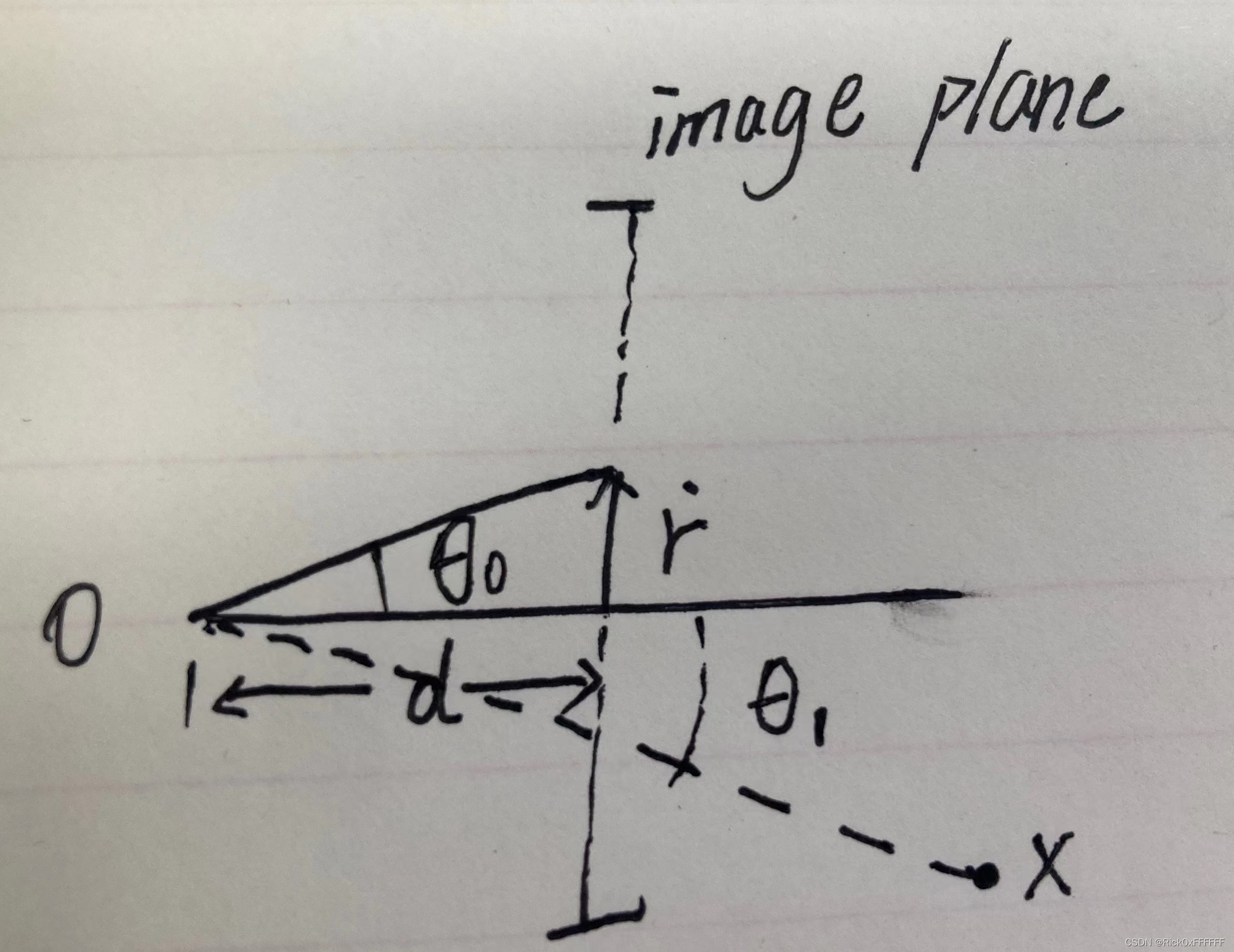
作者在supplement里面给出了推导过程,以下结合推导过程进行一些说明
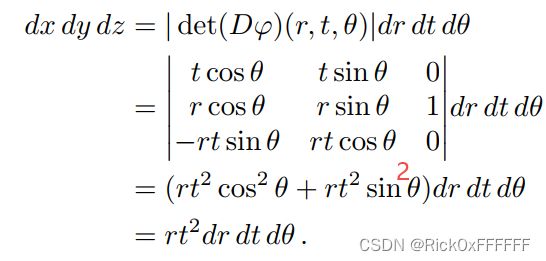
所以说,当时,x和y就在刻画该像素的红色圆圈上。同理,当
时,该区域就是描述像素平面上该红色圆圈以内区域。为了求解锥台的三维积分,我们需要求解出描述三维空间的微分,如下所示:
因此,锥台内的体积
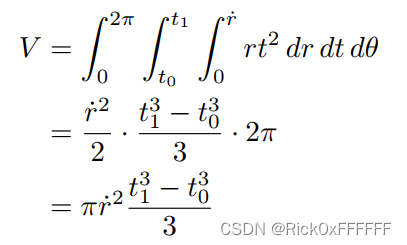
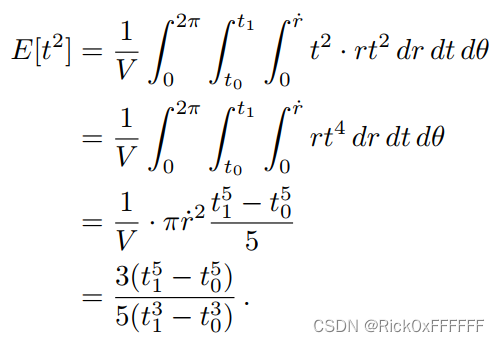
的期望为:
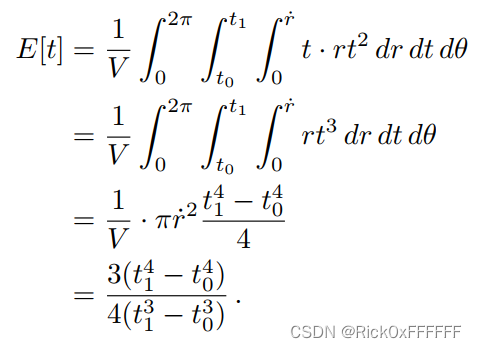
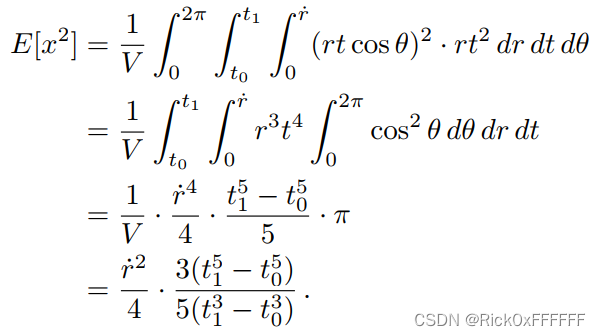
的期望为:
的期望为:
:
文章中说r的方差可以用x的或者y的来代替,这个是为啥我还需要再研究下,欢迎大佬们留言。
为了计算的稳定性,令, 将上式经过等式变换后得到:
参考文献:
Barron, Jonathan T., et al. "Mip-nerf: A multiscale representation for anti-aliasing neural radiance fields." Proceedings of the IEEE/CVF International Conference on Computer Vision. 2021.
Barron, Jonathan T., et al. "Mip-NeRF: A Multiscale Representation for Anti-Aliasing Neural Radiance Fields Supplemental Material."
版权归原作者 Rick0xFFFFFF 所有, 如有侵权,请联系我们删除。