
模式识别与图像处理课程实验二:基于UNet的目标检测网络
一、 实验原理与目的

- 实验采用Unet目标检测网络实现对目标的检测。例如检测舰船、车辆、人脸、道路等。其中的Unet网络结构如下所示
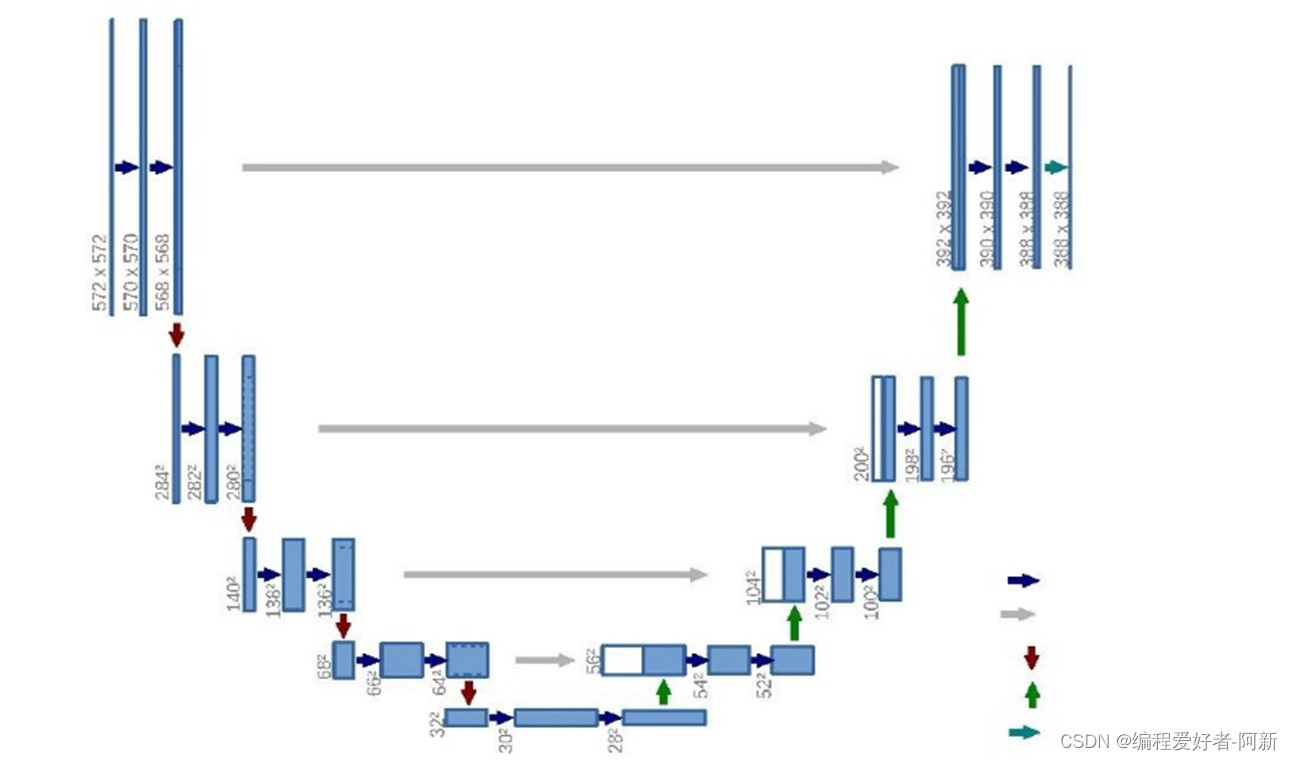
- U-Net 是一个 encoder-decoder 结构,左边一半的 encoder 包括若干卷积,池化,把图像进行下采样,右边的 decoder 进行上采样,恢复到原图的形状,给出每个像素的预测。
- 编码器有四个子模块,每个子模块包含两个卷积层,每个子模块之后有一个通过 maxpool 实现的下采样层。
- 输入图像的分辨率是 572x572, 第 1-5 个模块的分辨率分别是 572x572, 284x284, 140x140, 68x68 和 32x32。
- 解码器包含四个子模块,分辨率通过上采样操作依次上升,直到与输入图像的分辨率一致。该网络还使用了跳跃连接,将上采样结果与编码器中具有相同分辨率的子模块的输出进行连接,作为解码器中下一个子模块的输入。
- 架构中的一个重要修改部分是在上采样中还有大量的特征通道,这些通道允许网络将上下文信息传播到具有更高分辨率的层。因此,拓展路径或多或少地与收缩路径对称,并产生一个 U 形结构。
- 在该网络中没有任何完全连接的层,并且仅使用每个卷积的有效部分,即分割映射仅包含在输入图像中可获得完整上下文的像素。该策略允许通过重叠平铺策略对任意大小的图像进行无缝分割,如图所示。为了预测图像边界区域中的像素,通过镜像输入图像来推断缺失的上下文。这种平铺策略对于将网络应用于大型的图像非常重要,否则分辨率将受到 GPU 内存的限制。
二、 实验内容
本实验通过Unet网络,实现对道路目标的检测,测试的数据集存放于文件夹中。使用Unet网络得到训练的数据集:道路目标检测的结果。
三、 实验程序
3.1、导入库
# 导入库import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
from torchvision import datasets, transforms, models, utils
from torch.utils.data import DataLoader, Dataset, random_split
from torch.utils.tensorboard import SummaryWriter
#from torchsummary import summaryimport matplotlib.pyplot as plt
import numpy as np
import time
import os
import copy
import cv2
import argparse # argparse库: 解析命令行参数from tqdm import tqdm # 进度条
3.2、创建一个解析对象
# 创建一个解析对象
parser = argparse.ArgumentParser(description="Choose mode")
3.3、输入命令行和参数
# 输入命令行和参数
parser.add_argument('-mode', required=True, choices=['train','test'], default='train')
parser.add_argument('-dim',type=int, default=16)
parser.add_argument('-num_epochs',type=int, default=3)
parser.add_argument('-image_scale_h',type=int, default=256)
parser.add_argument('-image_scale_w',type=int, default=256)
parser.add_argument('-batch',type=int, default=4)
parser.add_argument('-img_cut',type=int, default=4)
parser.add_argument('-lr',type=float, default=5e-5)
parser.add_argument('-lr_1',type=float, default=5e-5)
parser.add_argument('-alpha',type=float, default=0.05)
parser.add_argument('-sa_scale',type=float, default=8)
parser.add_argument('-latent_size',type=int, default=100)
parser.add_argument('-data_path',type=str, default='./munich/train/img')
parser.add_argument('-label_path',type=str, default='./munich/train/lab')
parser.add_argument('-gpu',type=str, default='0')
parser.add_argument('-load_model', required=True, choices=['True','False'],help='choose True or False', default='False')
3.4、parse_args()方法进行解析
# parse_args()方法进行解析
opt = parser.parse_args()print(opt)
os.environ["CUDA_VISIBLE_DEVICES"]= opt.gpu
use_cuda = torch.cuda.is_available()print("use_cuda:", use_cuda)
3.5、指定计算机的第一个设备是GPU
# 指定计算机的第一个设备是GPU
device = torch.device("cuda"if use_cuda else"cpu")
IMG_CUT = opt.img_cut
LATENT_SIZE = opt.latent_size
writer = SummaryWriter('./runs2/gx0102')
3.6、创建文件路径
# 创建文件路径defauto_create_path(FilePath):if os.path.exists(FilePath):print(FilePath +' dir exists')else:print(FilePath +' dir not exists')
os.makedirs(FilePath)
3.7、创建文件存放训练的结果
# 创建文件存放训练的结果
auto_create_path('./test/lab_dete_AVD')
auto_create_path('./model')
auto_create_path('./results')
3.8、向下采样,求剩余的区域
# 向下采样,求剩余的区域classResidualBlockClass(nn.Module):def__init__(self, name, input_dim, output_dim, resample=None, activate='relu'):super(ResidualBlockClass, self).__init__()
self.name = name
self.input_dim = input_dim
self.output_dim = output_dim
self.resample = resample
self.batchnormlize_1 = nn.BatchNorm2d(input_dim)
self.activate = activate
if resample =='down':
self.conv_0 = nn.Conv2d(in_channels=input_dim, out_channels=output_dim, kernel_size=3, stride=1, padding=1)
self.conv_shortcut = nn.AvgPool2d(3, stride=2, padding=1)
self.conv_1 = nn.Conv2d(in_channels=input_dim, out_channels=input_dim, kernel_size=3, stride=1, padding=1)
self.conv_2 = nn.Conv2d(in_channels=input_dim, out_channels=output_dim, kernel_size=3, stride=2, padding=1)
self.batchnormlize_2 = nn.BatchNorm2d(input_dim)elif resample =='up':
self.conv_0 = nn.Conv2d(in_channels=input_dim, out_channels=output_dim, kernel_size=3, stride=1, padding=1)
self.conv_shortcut = nn.Upsample(scale_factor=2)
self.conv_1 = nn.Conv2d(in_channels=input_dim, out_channels=output_dim, kernel_size=3, stride=1, padding=1)
self.conv_2 = nn.ConvTranspose2d(in_channels=output_dim, out_channels=output_dim, kernel_size=3, stride=2, padding=2,
output_padding=1, dilation=2)
self.batchnormlize_2 = nn.BatchNorm2d(output_dim)elif resample ==None:
self.conv_shortcut = nn.Conv2d(in_channels=input_dim, out_channels=output_dim, kernel_size=3, stride=1, padding=1)
self.conv_1 = nn.Conv2d(in_channels=input_dim, out_channels=input_dim, kernel_size=3, stride=1, padding=1)
self.conv_2 = nn.Conv2d(in_channels=input_dim, out_channels=output_dim, kernel_size=3, stride=1, padding=1)
self.batchnormlize_2 = nn.BatchNorm2d(input_dim)else:raise Exception('invalid resample value')defforward(self, inputs):if self.output_dim == self.input_dim and self.resample ==None:
shortcut = inputs
elif self.resample =='down':
x = self.conv_0(inputs)
shortcut = self.conv_shortcut(x)elif self.resample ==None:
x = inputs
shortcut = self.conv_shortcut(x)else:
x = self.conv_0(inputs)
shortcut = self.conv_shortcut(x)if self.activate =='relu':
x = inputs
x = self.batchnormlize_1(x)
x = F.relu(x)
x = self.conv_1(x)
x = self.batchnormlize_2(x)
x = F.relu(x)
x = self.conv_2(x)return shortcut + x
else:
x = inputs
x = self.batchnormlize_1(x)
x = F.leaky_relu(x)
x = self.conv_1(x)
x = self.batchnormlize_2(x)
x = F.leaky_relu(x)
x = self.conv_2(x)return shortcut + x
classSelf_Attn(nn.Module):""" Self attention Layer"""def__init__(self,in_dim,activation=None):super(Self_Attn,self).__init__()
self.chanel_in = in_dim
# self.activation = activation
self.query_conv = nn.Conv2d(in_channels = in_dim, out_channels = in_dim//opt.sa_scale, kernel_size =1)
self.key_conv = nn.Conv2d(in_channels = in_dim, out_channels = in_dim//opt.sa_scale, kernel_size =1)
self.value_conv = nn.Conv2d(in_channels = in_dim, out_channels = in_dim, kernel_size =1)
self.gamma = nn.Parameter(torch.zeros(1))
self.softmax = nn.Softmax(dim=-1)defforward(self,x):"""
inputs :
x : input feature maps( B X C X W X H)
returns :
out : self attention value + input feature
attention: B X N X N (N is Width*Height)
"""
m_batchsize, C, width, height = x.size()
proj_query = self.query_conv(x).view(m_batchsize,-1,width*height).permute(0,2,1)# B X (W*H) X C
proj_key = self.key_conv(x).view(m_batchsize,-1,width*height)# B X C x (*W*H)
energy = torch.bmm(proj_query,proj_key)# transpose check
attention = self.softmax(energy)# BX (N) X (N)
proj_value = self.value_conv(x).view(m_batchsize,-1,width*height)# B X C X N
out = torch.bmm(proj_value,attention.permute(0,2,1))
out = out.view(m_batchsize, C, width, height)
out = self.gamma*out + x
return out
3.9、上采样,使用卷积恢复区域
# 上采样,使用卷积恢复区域classUpProject(nn.Module):def__init__(self, in_channels, out_channels):super(UpProject, self).__init__()# self.batch_size = batch_size
self.conv1_1 = nn.Conv2d(in_channels, out_channels,3)
self.conv1_2 = nn.Conv2d(in_channels, out_channels,(2,3))
self.conv1_3 = nn.Conv2d(in_channels, out_channels,(3,2))
self.conv1_4 = nn.Conv2d(in_channels, out_channels,2)
self.conv2_1 = nn.Conv2d(in_channels, out_channels,3)
self.conv2_2 = nn.Conv2d(in_channels, out_channels,(2,3))
self.conv2_3 = nn.Conv2d(in_channels, out_channels,(3,2))
self.conv2_4 = nn.Conv2d(in_channels, out_channels,2)
self.bn1_1 = nn.BatchNorm2d(out_channels)
self.bn1_2 = nn.BatchNorm2d(out_channels)
self.relu = nn.ReLU(inplace=True)
self.conv3 = nn.Conv2d(out_channels, out_channels,3, padding=1)
self.bn2 = nn.BatchNorm2d(out_channels)defforward(self, x):# b, 10, 8, 1024
batch_size = x.shape[0]
out1_1 = self.conv1_1(nn.functional.pad(x,(1,1,1,1)))
out1_2 = self.conv1_2(nn.functional.pad(x,(1,1,0,1)))#right interleaving padding#out1_2 = self.conv1_2(nn.functional.pad(x, (1, 1, 1, 0)))#author's interleaving pading in github
out1_3 = self.conv1_3(nn.functional.pad(x,(0,1,1,1)))#right interleaving padding#out1_3 = self.conv1_3(nn.functional.pad(x, (1, 0, 1, 1)))#author's interleaving pading in github
out1_4 = self.conv1_4(nn.functional.pad(x,(0,1,0,1)))#right interleaving padding#out1_4 = self.conv1_4(nn.functional.pad(x, (1, 0, 1, 0)))#author's interleaving pading in github
out2_1 = self.conv2_1(nn.functional.pad(x,(1,1,1,1)))
out2_2 = self.conv2_2(nn.functional.pad(x,(1,1,0,1)))#right interleaving padding#out2_2 = self.conv2_2(nn.functional.pad(x, (1, 1, 1, 0)))#author's interleaving pading in github
out2_3 = self.conv2_3(nn.functional.pad(x,(0,1,1,1)))#right interleaving padding#out2_3 = self.conv2_3(nn.functional.pad(x, (1, 0, 1, 1)))#author's interleaving pading in github
out2_4 = self.conv2_4(nn.functional.pad(x,(0,1,0,1)))#right interleaving padding#out2_4 = self.conv2_4(nn.functional.pad(x, (1, 0, 1, 0)))#author's interleaving pading in github
height = out1_1.size()[2]
width = out1_1.size()[3]
out1_1_2 = torch.stack((out1_1, out1_2), dim=-3).permute(0,1,3,4,2).contiguous().view(
batch_size,-1, height, width *2)
out1_3_4 = torch.stack((out1_3, out1_4), dim=-3).permute(0,1,3,4,2).contiguous().view(
batch_size,-1, height, width *2)
out1_1234 = torch.stack((out1_1_2, out1_3_4), dim=-3).permute(0,1,3,2,4).contiguous().view(
batch_size,-1, height *2, width *2)
out2_1_2 = torch.stack((out2_1, out2_2), dim=-3).permute(0,1,3,4,2).contiguous().view(
batch_size,-1, height, width *2)
out2_3_4 = torch.stack((out2_3, out2_4), dim=-3).permute(0,1,3,4,2).contiguous().view(
batch_size,-1, height, width *2)
out2_1234 = torch.stack((out2_1_2, out2_3_4), dim=-3).permute(0,1,3,2,4).contiguous().view(
batch_size,-1, height *2, width *2)
out1 = self.bn1_1(out1_1234)
out1 = self.relu(out1)
out1 = self.conv3(out1)
out1 = self.bn2(out1)
out2 = self.bn1_2(out2_1234)
out = out1 + out2
out = self.relu(out)return out
#编码,下采样classFcrn_encode(nn.Module):def__init__(self, dim=opt.dim):super(Fcrn_encode, self).__init__()
self.dim = dim
self.conv_1 = nn.Conv2d(in_channels=3, out_channels=dim, kernel_size=3, stride=1, padding=1)
self.residual_block_1_down_1 = ResidualBlockClass('Detector.Res1',1*dim,2*dim, resample='down', activate='leaky_relu')# 128x128
self.residual_block_2_down_1 = ResidualBlockClass('Detector.Res2',2*dim,4*dim, resample='down', activate='leaky_relu')#64x64
self.residual_block_3_down_1 = ResidualBlockClass('Detector.Res3',4*dim,4*dim, resample='down', activate='leaky_relu')#32x32
self.residual_block_4_down_1 = ResidualBlockClass('Detector.Res4',4*dim,6*dim, resample='down', activate='leaky_relu')#16x16
self.residual_block_5_none_1 = ResidualBlockClass('Detector.Res5',6*dim,6*dim, resample=None, activate='leaky_relu')defforward(self, x, n1=0, n2=0, n3=0):
x1 = self.conv_1(x)#x1:dimx256x256
x2 = self.residual_block_1_down_1(x1)#x2:2dimx128x128
x3 = self.residual_block_2_down_1((1-opt.alpha)*x2+opt.alpha*n1)#x3:4dimx64x64
x4 = self.residual_block_3_down_1((1-opt.alpha)*x3+opt.alpha*n2)#x4:4dimx32x32
x = self.residual_block_4_down_1((1-opt.alpha)*x4+opt.alpha*n3)
feature = self.residual_block_5_none_1(x)
x = F.tanh(feature)return x, x2, x3, x4
3.10、解码, 上采样
# 解码, 上采样classFcrn_decode(nn.Module):def__init__(self, dim=opt.dim):super(Fcrn_decode, self).__init__()
self.dim = dim
self.conv_2 = nn.Conv2d(in_channels=dim, out_channels=1, kernel_size=3, stride=1, padding=1)
self.residual_block_6_none_1 = ResidualBlockClass('Detector.Res6',6*dim,6*dim, resample=None, activate='leaky_relu')# self.residual_block_7_up_1 = ResidualBlockClass('Detector.Res7', 6*dim, 6*dim, resample='up', activate='leaky_relu')
self.sa_0 = Self_Attn(6*dim)#32x32
self.UpProject_1 = UpProject(6*dim,4*dim)
self.residual_block_8_up_1 = ResidualBlockClass('Detector.Res8',6*dim,4*dim, resample='up', activate='leaky_relu')
self.sa_1 = Self_Attn(4*dim)#64x64
self.UpProject_2 = UpProject(2*4*dim,4*dim)
self.sa_2 = Self_Attn(4*dim)
self.residual_block_9_up_1 = ResidualBlockClass('Detector.Res9',4*dim,4*dim, resample='up', activate='leaky_relu')#128x128
self.UpProject_3 = UpProject(2*4*dim,2*dim)
self.sa_3 = Self_Attn(2*dim)
self.residual_block_10_up_1 = ResidualBlockClass('Detector.Res10',4*dim,2*dim, resample='up', activate='leaky_relu')#256x256
self.UpProject_4 = UpProject(2*2*dim,1*dim)
self.sa_4 = Self_Attn(1*dim)
self.residual_block_11_up_1 = ResidualBlockClass('Detector.Res11',2*dim,1*dim, resample='up', activate='leaky_relu')defforward(self, x, x2, x3, x4):
x = self.residual_block_6_none_1(x)
x = self.UpProject_1(x)
x = self.sa_1(x)
x = self.UpProject_2(torch.cat((x, x4), dim=1))
x = self.sa_2(x)
x = self.UpProject_3(torch.cat((x, x3), dim=1))# x = self.sa_3(x)
x = self.UpProject_4(torch.cat((x, x2), dim=1))# x = self.sa_4(x)
x = F.normalize(x, dim=[0,2,3])
x = F.leaky_relu(x)
x = self.conv_2(x)
x = F.sigmoid(x)return x
classGenerator(nn.Module):def__init__(self, dim=opt.dim):super(Generator, self).__init__()
self.dim = dim
self.conv_1 = nn.Conv2d(in_channels=4, out_channels=1*dim, kernel_size=3, stride=1, padding=1)
self.conv_2 = nn.Conv2d(in_channels=dim, out_channels=3, kernel_size=3, stride=1, padding=1)
self.batchnormlize = nn.BatchNorm2d(1*dim)
self.residual_block_1 = ResidualBlockClass('G.Res1',1*dim,2*dim, resample='down')#128x128
self.residual_block_2 = ResidualBlockClass('G.Res2',2*dim,4*dim, resample='down')#64x64# self.residual_block_2_1 = ResidualBlockClass('G.Res2_1', 4*dim, 4*dim, resample='down')#64x64#self.residual_block_2_2 = ResidualBlockClass('G.Res2_2', 4*dim, 4*dim, resample=None)#64x64
self.residual_block_3 = ResidualBlockClass('G.Res3',4*dim,4*dim, resample='down')#32x32
self.residual_block_4 = ResidualBlockClass('G.Res4',4*dim,6*dim, resample='down')#16x16
self.residual_block_5 = ResidualBlockClass('G.Res5',6*dim,6*dim, resample=None)#16x16
self.residual_block_6 = ResidualBlockClass('G.Res6',6*dim,6*dim, resample=None)defforward(self, x):
x = self.conv_1(x)
x1 = self.residual_block_1(x)#x1:2*dimx128x128
x2 = self.residual_block_2(x1)#x2:4*dimx64x64# x = self.residual_block_2_1(x)#x = self.residual_block_2_2(x)
x3 = self.residual_block_3(x2)#x3:4*dimx32x32
x = self.residual_block_4(x3)#x4:6*dimx16x16
x = self.residual_block_5(x)
x = self.residual_block_6(x)
x = F.tanh(x)return x, x1, x2, x3
classDiscriminator(nn.Module):def__init__(self, dim=opt.dim):super(Discriminator, self).__init__()
self.dim = dim
self.conv_1 = nn.Conv2d(in_channels=6*dim, out_channels=6*dim, kernel_size=3, stride=1, padding=1)#16x16
self.conv_2 = nn.Conv2d(in_channels=6*dim, out_channels=6*dim, kernel_size=3, stride=1, padding=1)
self.conv_3 = nn.Conv2d(in_channels=6*dim, out_channels=4*dim, kernel_size=3, stride=1, padding=1)
self.bn_1 = nn.BatchNorm2d(6*dim)
self.conv_4 = nn.Conv2d(in_channels=4*dim, out_channels=4*dim, kernel_size=3, stride=2, padding=1)#8x8
self.conv_5 = nn.Conv2d(in_channels=4*dim, out_channels=4*dim, kernel_size=3, stride=1, padding=1)#8x8
self.conv_6 = nn.Conv2d(in_channels=4*dim, out_channels=2*dim, kernel_size=3, stride=2, padding=1)#4x4
self.bn_2 = nn.BatchNorm2d(2*dim)
self.conv_7 = nn.Conv2d(in_channels=2*dim, out_channels=2*dim, kernel_size=3, stride=1, padding=1)#4x4
self.conv_8 = nn.Conv2d(in_channels=2*dim, out_channels=1*dim, kernel_size=3, stride=1, padding=1)#4x4#self.conv_9 = nn.Conv2d(in_channels=1*dim, out_channels=1, kernel_size=4, stride=1, padding=(0, 1), dilation=(1, 3))#1x1defforward(self, x):
x = F.leaky_relu(self.conv_1(x), negative_slope=0.02)
x = F.leaky_relu(self.conv_2(x), negative_slope=0.02)
x = F.leaky_relu(self.conv_3(x), negative_slope=0.02)# x = F.leaky_relu(self.bn_1(x), negative_slope=0.02)
x = F.leaky_relu(self.conv_4(x), negative_slope=0.02)
x = F.leaky_relu(self.conv_5(x), negative_slope=0.02)
x = F.leaky_relu(self.conv_6(x), negative_slope=0.02)# x = F.leaky_relu(self.bn_2(x), negative_slope=0.2)
x = F.leaky_relu(self.conv_7(x), negative_slope=0.02)
x = F.leaky_relu(self.conv_8(x), negative_slope=0.02)#x = self.conv_9(x)
x = torch.mean(x, dim=[1,2,3])
x = F.sigmoid(x)return x.view(-1,1).squeeze()
transform = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize([0.5,0.5,0.5],[0.5,0.5,0.5])])
3.11、获取训练的数据集
# 获取训练的数据集classGAN_Dataset(Dataset):def__init__(self, transform=None):
self.transform = transform
def__len__(self):returnlen(os.listdir(opt.data_path))def__getitem__(self, idx):
img_name = os.listdir(opt.data_path)[idx]
imgA = cv2.imread(opt.data_path +'/'+ img_name)
imgA = cv2.resize(imgA,(opt.image_scale_w, opt.image_scale_h))
imgB = cv2.imread(opt.label_path +'/'+ img_name[:-4]+'.png',0)
imgB = cv2.resize(imgB,(opt.image_scale_w, opt.image_scale_h))# imgB[imgB>30] = 255
imgB = imgB/255#imgB = imgB.astype('uint8')
imgB = torch.FloatTensor(imgB)
imgB = torch.unsqueeze(imgB,0)#print(imgB.shape)if self.transform:
imgA = self.transform(imgA)return imgA, imgB
img_road = GAN_Dataset(transform)
train_dataloader = DataLoader(img_road, batch_size=opt.batch, shuffle=True)print(len(train_dataloader.dataset), train_dataloader.dataset[7][1].shape)
3.12、测试数据集
# 测试数据集classtest_Dataset(Dataset):# DATA_PATH = './test/img'# LABEL_PATH = './test/lab'def__init__(self, transform=None):
self.transform = transform
def__len__(self):returnlen(os.listdir('./munich/test/img'))def__getitem__(self, idx):
img_name = os.listdir('./munich/test/img')
img_name.sort(key=lambda x:int(x[:-4]))
img_name = img_name[idx]
imgA = cv2.imread('./munich/test/img'+'/'+ img_name)
imgA = cv2.resize(imgA,(opt.image_scale_w, opt.image_scale_h))
imgB = cv2.imread('./munich/test/lab'+'/'+ img_name[:-4]+'.png',0)
imgB = cv2.resize(imgB,(opt.image_scale_w, opt.image_scale_h))#imgB = imgB/255# imgB[imgB>30] = 255
imgB = imgB/255#imgB = imgB.astype('uint8')
imgB = torch.FloatTensor(imgB)
imgB = torch.unsqueeze(imgB,0)#print(imgB.shape)if self.transform:#imgA = imgA/255#imgA = np.transpose(imgA, (2, 0, 1))#imgA = torch.FloatTensor(imgA)
imgA = self.transform(imgA)return imgA, imgB, img_name[:-4]
img_road_test = test_Dataset(transform)
test_dataloader = DataLoader(img_road_test, batch_size=1, shuffle=False)print(len(test_dataloader.dataset), test_dataloader.dataset[7][1].shape)
loss = nn.BCELoss()
fcrn_encode = Fcrn_encode()
fcrn_encode = nn.DataParallel(fcrn_encode)
fcrn_encode = fcrn_encode.to(device)if opt.load_model =='True':
fcrn_encode.load_state_dict(torch.load('./model/fcrn_encode_{}_link.pkl'.format(opt.alpha)))
fcrn_decode = Fcrn_decode()
fcrn_decode = nn.DataParallel(fcrn_decode)
fcrn_decode = fcrn_decode.to(device)if opt.load_model =='True':
fcrn_decode.load_state_dict(torch.load('./model/fcrn_decode_{}_link.pkl'.format(opt.alpha)))
Gen = Generator()
Gen = nn.DataParallel(Gen)
Gen = Gen.to(device)if opt.load_model =='True':
Gen.load_state_dict(torch.load('./model/Gen_{}_link.pkl'.format(opt.alpha)))
Dis = Discriminator()
Dis = nn.DataParallel(Dis)
Dis = Dis.to(device)if opt.load_model =='True':
Dis.load_state_dict(torch.load('./model/Dis_{}_link.pkl'.format(opt.alpha)))
Dis_optimizer = optim.Adam(Dis.parameters(), lr=opt.lr_1)
Dis_scheduler = optim.lr_scheduler.StepLR(Dis_optimizer,step_size=800,gamma =0.5)
Fcrn_encode_optimizer = optim.Adam(fcrn_encode.parameters(), lr=opt.lr)
encode_scheduler = optim.lr_scheduler.StepLR(Fcrn_encode_optimizer,step_size=300,gamma =0.5)
Fcrn_decode_optimizer = optim.Adam(fcrn_decode.parameters(), lr=opt.lr)
decode_scheduler = optim.lr_scheduler.StepLR(Fcrn_decode_optimizer,step_size=300,gamma =0.5)
Gen_optimizer = optim.Adam(Gen.parameters(), lr=opt.lr_1)
Gen_scheduler = optim.lr_scheduler.StepLR(Gen_optimizer,step_size=800,gamma =0.5)
3.13、训练函数
# 训练函数deftrain(device, train_dataloader, epoch):
fcrn_encode.train()
fcrn_decode.train()# Gen.train()for batch_idx,(road, road_label)inenumerate(train_dataloader):
road, road_label = road.to(device), road_label.to(device)
z = torch.randn(road.shape[0],1, opt.image_scale_h, opt.image_scale_w, device=device)
img_noise = torch.cat((road, z), dim=1)
fake_feature, n1, n2, n3 = Gen(img_noise)
feature, x2, x3, x4 = fcrn_encode(road, n1, n2, n3)
Dis_optimizer.zero_grad()
d_real = Dis(feature.detach())
d_loss_real = loss(d_real,0.9*torch.ones_like(d_real))
d_fake = Dis((1-opt.alpha)*feature.detach()+ opt.alpha*fake_feature.detach())
d_loss_fake = loss(d_fake,0.1+ torch.zeros_like(d_fake))
d_loss = d_loss_real + d_loss_fake
d_loss.backward()
Dis_optimizer.step()
Gen_optimizer.zero_grad()
z = torch.randn(road.shape[0],1, opt.image_scale_h, opt.image_scale_w, device=device)
img_noise = torch.cat((road, z), dim=1)
fake_feature, n1, n2, n3 = Gen(img_noise)
detect_noise = fcrn_decode((1-opt.alpha)*feature.detach()+ opt.alpha*fake_feature, x2, x3, x4)
d_fake = Dis((1-opt.alpha)*feature.detach()+ opt.alpha*fake_feature)
g_loss = loss(d_fake,0.9*torch.ones_like(d_fake))
g_loss -= loss(detect_noise, road_label)
g_loss.backward()
Gen_optimizer.step()
z = torch.randn(road.shape[0],1, opt.image_scale_h, opt.image_scale_w, device=device)
img_noise = torch.cat((road, z), dim=1)
fake_feature, n1, n2, n3 = Gen(img_noise)# feature_img = fake_feature.detach().cpu()# feature_img = np.transpose(np.array(utils.make_grid(feature_img, nrow=IMG_CUT)), (1, 2, 0))
feature, x2, x3, x4 = fcrn_encode(road, n1, n2, n3)#detect = fcrn_decode(0.9*feature + 0.1*fake_feature)
detect = fcrn_decode(feature, x2, x3, x4 )# detect_img = detect.detach().cpu()# detect_img = np.transpose(np.array(utils.make_grid(detect_img, nrow=IMG_CUT)), (1, 2, 0))# blur = cv2.GaussianBlur(detect_img*255, (3, 3), 0)# _, thresh = cv2.threshold(blur,120,255,cv2.THRESH_BINARY)
fcrn_loss = loss(detect, road_label)
fcrn_loss += torch.mean(torch.abs(detect-road_label))/(torch.mean(torch.abs(detect+road_label))+0.001)
Fcrn_encode_optimizer.zero_grad()
Fcrn_decode_optimizer.zero_grad()
fcrn_loss.backward()
Fcrn_encode_optimizer.step()
Fcrn_decode_optimizer.step()
z = torch.randn(road.shape[0],1, opt.image_scale_h, opt.image_scale_w, device=device)
img_noise = torch.cat((road, z), dim=1)
fake_feature, n1, n2, n3 = Gen(img_noise)# ffp, _ = torch.split(fake_feature, [3, 6*opt.dim-3], dim=1)# fake_feature_np = ffp.detach().cpu()# fake_feature_np = np.transpose(np.array(utils.make_grid(fake_feature_np, nrow=IMG_CUT, padding=0)), (1, 2, 0))
feature, x2, x3, x4 = fcrn_encode(road, n1, n2, n3)# fp, _ = torch.split(feature, [3, 6*opt.dim-3], dim=1)# feature_np = fp.detach().cpu()# feature_np = np.transpose(np.array(utils.make_grid(feature_np, nrow=IMG_CUT, padding=0)), (1, 2, 0))
road_np = road.detach().cpu()
road_np = np.transpose(np.array(utils.make_grid(road_np, nrow=IMG_CUT, padding=0)),(1,2,0))
road_label_np = road_label.detach().cpu()
road_label_np = np.transpose(np.array(utils.make_grid(road_label_np, nrow=IMG_CUT, padding=0)),(1,2,0))
detect_noise = fcrn_decode((1-opt.alpha)*feature + opt.alpha*fake_feature.detach(), x2, x3, x4 )
detect_noise_np = detect_noise.detach().cpu()
detect_noise_np = np.transpose(np.array(utils.make_grid(detect_noise_np, nrow=IMG_CUT, padding=0)),(1,2,0))
blur = cv2.GaussianBlur(detect_noise_np*255,(3,3),0)
_, thresh = cv2.threshold(blur,120,255,cv2.THRESH_BINARY)
fcrn_loss1 = loss(detect_noise, road_label)
fcrn_loss1 += torch.mean(torch.abs(detect_noise-road_label))/(torch.mean(torch.abs(detect_noise+road_label))+0.001)
Fcrn_decode_optimizer.zero_grad()
Fcrn_encode_optimizer.zero_grad()
fcrn_loss1.backward()
Fcrn_decode_optimizer.step()
Fcrn_encode_optimizer.step()
writer.add_scalar('g_loss', g_loss.data.item(), global_step = batch_idx)
writer.add_scalar('d_loss', d_loss.data.item(), global_step = batch_idx)
writer.add_scalar('Fcrn_loss', fcrn_loss1.data.item(), global_step = batch_idx)if batch_idx %20==0:
tqdm.write('[{}/{}] [{}/{}] Loss_Dis: {:.6f} Loss_Gen: {:.6f} Loss_Fcrn_encode: {:.6f} Loss_Fcrn_decode: {:.6f}'.format(epoch, num_epochs, batch_idx,len(train_dataloader), d_loss.data.item(), g_loss.data.item(),(fcrn_loss.data.item())/2,(fcrn_loss1.data.item())/2))if batch_idx %300==0:
mix = np.concatenate(((road_np+1)*255/2, road_label_np*255, detect_noise_np*255), axis=0)# feature_np = cv2.resize((feature_np + 1)*255/2, (opt.image_scale_w, opt.image_scale_h))# fake_feature_np = cv2.resize((fake_feature_np + 1)*255/2, (opt.image_scale_w, opt.image_scale_h))# mix1 = np.concatenate((feature_np, fake_feature_np), axis=0)
cv2.imwrite("./results/dete{}_{}.png".format(epoch, batch_idx), mix)# cv2.imwrite('./results_fcrn_noise/feature{}_{}.png'.format(epoch, batch_idx), mix1)# cv2.imwrite("./results/feature{}_{}.png".format(epoch, batch_idx), (feature_img + 1)*255/2)# cv2.imwrite("./results9/label{}_{}.png".format(epoch, batch_idx), np.transpose(road_label.cpu().numpy(), (2, 0, 1))*255)
3.14、测试函数
# 测试函数deftest(device, test_dataloader):
fcrn_encode.eval()
fcrn_decode.eval()# Gen.eval()for batch_idx,(road, road_label, img_name)inenumerate(test_dataloader):
road, _ = road.to(device), road_label.to(device)# z = torch.randn(road.shape[0], 1, IMAGE_SCALE, IMAGE_SCALE, device=device)# img_noise = torch.cat((road, z), dim=1)# fake_feature = Gen(img_noise)
feature, x2, x3, x4 = fcrn_encode(road)
det_road = fcrn_decode(feature, x2, x3, x4)
label = det_road.detach().cpu()
label = np.transpose(np.array(utils.make_grid(label, padding=0, nrow=1)),(1,2,0))# blur = cv2.GaussianBlur(label*255, (5, 5), 0)
_, thresh = cv2.threshold(label*255,200,255, cv2.THRESH_BINARY)
cv2.imwrite('./test/lab_dete_AVD/{}.png'.format(int(img_name[0])), thresh)print('testing...')print('{}/{}'.format(batch_idx,len(test_dataloader)))print('Done!')# 文件的读取与保存defiou(path_img, path_lab, epoch):
img_name = os.listdir(path_img)
img_name.sort(key=lambda x:int(x[:-4]))print(img_name)
iou_list =[]for i inrange(len(img_name)):
det = img_name[i]
det = cv2.imread(path_img +'/'+ det,0)
lab = img_name[i]
lab = cv2.imread(path_lab +'/'+ lab[:-4]+'.png',0)
lab = cv2.resize(lab,(opt.image_scale_w, opt.image_scale_h))
count0, count1, a, count2 =0,0,0,0for j inrange(det.shape[0]):for k inrange(det.shape[1]):if det[j][k]!=0and lab[j][k]!=0:
count0 +=1elif det[j][k]==0and lab[j][k]!=0:
count1 +=1elif det[j][k]!=0and lab[j][k]==0:
count2 +=1#iou = (count1 + count2)/(det.shape[0] * det.shape[1])
iou = count0/(count1 + count0 + count2 +0.0001)
iou_list.append(iou)print(img_name[i],':', iou)print('mean_iou:',sum(iou_list)/len(iou_list))withopen('./munich_iou.txt',"a")as f:
f.write("model_num"+" "+str(epoch)+" "+'mean_iou:'+str(sum(iou_list)/len(iou_list))+'\n')
3.15、主函数
# 主函数if __name__ =='__main__':if opt.mode =='train':
num_epochs = opt.num_epochs
for epoch in tqdm(range(num_epochs)):
train(device, train_dataloader, epoch)
Dis_scheduler.step()
Gen_scheduler.step()
encode_scheduler.step()
decode_scheduler.step()if epoch %50==0:
now = time.strftime("%Y-%m-%d-%H_%M_%S",time.localtime(time.time()))
torch.save(Dis.state_dict(),'./model/Dis_{}'+ now +'munich.pkl'.format(opt.alpha))
torch.save(Gen.state_dict(),'./model/Gen_{}'+ now +'munich.pkl'.format(opt.alpha))
torch.save(fcrn_decode.state_dict(),'./model/fcrn_decode_{}'+ now +'munich.pkl'.format(opt.alpha))
torch.save(fcrn_encode.state_dict(),'./model/fcrn_encode_{}'+ now +'munich.pkl'.format(opt.alpha))print('testing...')
test(device, test_dataloader)
iou('./test/lab_dete_AVD','./munich/test/lab', epoch)if opt.mode =='test':
test(device, test_dataloader)
iou('./test/lab_dete_AVD','./munich/test/lab','test')
四、 实验运行步骤与运行结果
4.1、 运行步骤
- 1
- 2
- 3

- 4
- 5
4.2、 运行的结果
1
- 2
- 3

- 4
- 5
-6
- 7

- 8

五、 实验总结
- 从运行结果可以看出,用Unet网络训练目标数据集,可以对数据集的道路目标实现准确的检测。
- 从大量的数据集中进行测试,在CPU上运行,Unet网络测试数据用了将近10小时的训练时间。但是,得到的目标检测的结果是非常准确的。

本文转载自: https://blog.csdn.net/m0_47419053/article/details/126965807
版权归原作者 编程爱好者-阿新 所有, 如有侵权,请联系我们删除。
版权归原作者 编程爱好者-阿新 所有, 如有侵权,请联系我们删除。