
1.前言
Sophus库是一个较好的李群和李代数的C++库,它很好的支持了SO(3),so(3),SE(3)和se(3)。Sophus库是基于Eigen基础上开发的,继承了Eigen库中的定义的各个类。因此在使用Eigen库中的类时,既可以使用Eigen命名空间,也可以使用Sophus命名空间。由于历史原因,早期的Sophus库是非模板类,只能提供双精度,后来又改写了一个模板类的,支持不同精度但也增加了使用难度。
总之,现在的Sophus库有两个版本:早期的非模板类和现在的模板类,本文会介绍如何安装这两个版本。github源码路径
2.非模板类Sophus安装
非模板类Sophus的依赖库是Eigen,版本为3.3.X,需提前安装好Eigen库,安装可参考
(1)下载源文件(需要先安装Eigen 3.3.X)
git clone https://github.com/strasdat/Sophus.git // 下载的最新版是模板类的
cd Sophus
git checkout a621ff // 切换为非模板类的历史版本
(2)安装Sophus
cd Sophus
mkdir build
cd build
cmake ..
make
sudo make install
头文件会安装到
/usr/local/include/sophus
下
(3)非模板Sophus的使用
在非模板类中,库是利用
.c
加
.h
的方式实现的
引入头文件:
//引用非模板类库#include“sophus/so3.h”#include“sophus/se3.h”
cmake编译时,CMakeLists.txt文件的编写
# 非模板类库
cmake_minimum_required( VERSION 2.8 )
project( useSophus )
set(CMAKE_CXX_STANDARD 11)
find_package( Sophus REQUIRED )
include_directories( ${Sophus_INCLUDE_DIRS} )
add_executable( useSophus useSophus.cpp )
# 由于非模板类版本是有库文件的,因此需要链接
target_link_libraries( useSophus ${Sophus_LIBRARIUES} )
3.模板类Sophus安装
模板类Sophus的依赖库是Eigen(版本为3.3.X)和fmt,需提前安装好Eigen库和fmt库,Eigen库的安装可参考这个
(1)安装fmt库
git clone https://github.com/fmtlib/fmt.git
cd fmt
# 默认安装是安装为静态库文件,以后有库文件依赖fmt库的话只能生成静态库,不能为共享库,因此推荐安装为共享库方式
# 如果要安装为共享库文件,就需要在CMakeLists.txt文件中添加:add_compile_options(-fPIC)
mkdir build
cd build
cmake ..
make
sudo make install
(2)下载Sophus源文件
git clone https://github.com/strasdat/Sophus.git
(3)安装Sophus
cd Sophus
mkdir build
cd build
cmake ..
make
sudo make install
头文件会安装到
/usr/local/include/sophus
下
(4)模板类Sophus的使用
模板类库中是集合在一个
.hpp
中实现的,因此不需要Sophus库文件的链接,但是Sophus中还依赖于fmt库,需要对fmt库文件链接
引入头文件:
//引用模板类库#include“sophus/so3.hpp”#include“sophus/se3.hpp”
cmake编译时,CMakeLists.txt文件的编写
# 模板类(依赖fmt库)
cmake_minimum_required(VERSION 3.0)
project(learn_Sophus)
set(CMAKE_CXX_STANDARD 11)
find_package(Sophus REQUIRED)
include_directories(${Sophus_INCLUDE_DIRS})
add_executable(learn_Sophus sophus_1.cpp)
# 需要链接fmt的动态库文件
target_link_libraries(learn_Sophus fmt::fmt)
# 或者也可以改为
# target_link_libraries(learn_Sophus Sophus::Sophus)
4.不依赖fmt库的模板类Sophus安装
正常情况下,模板类的Sophus会依赖fmt,fmt库是用于实现I/O文本格式化输出的功能,在Sophus中实现日志文件打印,因此去除掉fmt库也不影响我们正常使用Sophus库,且Sophus库本身和Eigen库一样纯用hpp文件构成,本身不需要库文件的链接,现在多了个fmt库的依赖感觉破坏了Sophus库的简化美感。
在github上,作者说在cmake编译源码时指定"-DUSE_BASIC_LOGGING=ON"可以安装不依赖于fmt库,即:
cd Sophus
mkdir build
cd build
cmake ../ -DUSE_BASIC_LOGGING=ON
make
sudo make install
但结果发现编译的hpp文件中还是存在个别文件(如commont.hpp)用到了fmt库,根据github上的提问,找到了一种解决方法:
在include前添加
\#define SOPHUS_USE_BASIC_LOGGING
,注意必需是include前,否则还是依赖于fmt库:
// C++自己的程序中:// 需要在include sophus库头文件前添加该宏定义#defineSOPHUS_USE_BASIC_LOGGING#include<iostream>#include<sophus/so3.hpp>#include<sophus/se3.hpp>
此时CMakeLists.txt文件为:
cmake_minimum_required(VERSION 3.0)
project(learn_Sophus)
set(CMAKE_CXX_STANDARD 11)
find_package(Sophus REQUIRED)
include_directories(${Sophus_INCLUDE_DIRS})
# 此时不需要库文件的链接了
add_executable(learn_Sophus sophus_1.cpp)
5.Sophus库的基本使用
下面的例子是模板类的Sophus库使用,非模板类基本类似,就是数据类型变了点。
/*
Eigen库是一个开源的C++线性代数库,它提供了快速的有关矩阵的线性代数运算,还包括解方程等功能。
但是Eigen库提供了集合模块,但没有提供李代数的支持。一个较好的李群和李代数的库是Sophus库,它很好的支持了
SO(3),so(3),SE(3)和se(3)。Sophus库是基于Eigen基础上开发的,继承了Eigen库中的定义的各个类。因此在
使用Eigen库中的类时,既可以使用Eigen命名空间,也可以使用Sophus命名空间:
Eigen::Matrix3d和Sophus::Matrix3d
Eigen::Vector3d和Sophus::Vector3d
此外,为了方便说明SE(4)和se(4),Sophus库还typedef了Vector4d、Matrix4d、Vector6d和Matrix6d等,即:
Sophus::Vector4d
Sophus::Matrix4d
Sophus::Vector6d
Sophus::Matrix6d
*/// 添加该宏定义可以使sophus库不依赖fmt库,必需得在include<sophus>前添加// #define SOPHUS_USE_BASIC_LOGGING#include<iostream>#include<sophus/so3.hpp>#include<sophus/se3.hpp>#include<cmath>#include<Eigen/Dense>voidfunc_1();voidfunc_2();intmain(){// func_1();func_2();return0;}voidfunc_1(){// 李群SO3和旋转矩阵R和李代数so3// 1.旋转矩阵R <-> 李群SO3// 沿Z轴旋转90度的旋转矩阵
Eigen::Matrix3d R =Eigen::AngleAxisd(M_PI/2,Eigen::Vector3d::UnitZ()).toRotationMatrix();// Sophus模板库和eigen一样选择精度,如SO3d、SO3f、SE3d、SE3f// 旋转矩阵R -> 李群SO3
Sophus::SO3d SO3_R(R);// 构造函数参数可以是旋转矩阵// 旋转矩阵R <- 李群SO3
Eigen::Matrix3d R_SO3 = SO3_R.matrix();
std::cout << SO3_R.matrix()<<std::endl;// 输出时需要将SO3转换为矩阵形式// 2.四元数q -> 李群SO3
Eigen::Quaterniond q(R);
Sophus::SO3d SO3_q(q);// 构造函数参数可以是四元数
std::cout << SO3_q.matrix()<<std::endl;// 3. 李群SO3 <-> 李代数so3// 李群SO3 -> 李代数so3
Eigen::Vector3d so3 = SO3_R.log();
std::cout << so3.transpose()<<std::endl;// 李群SO3 <- 李代数so3
Sophus::SO3d SO3_so3 = Sophus::SO3d::exp(so3);
std::cout << SO3_so3.matrix()<<std::endl;// 4.李代数so3 <-> 三维反对称矩阵R_v// 李代数so3 -> 三维反对称矩阵R_v
Eigen::Matrix3d R_v = Sophus::SO3d::hat(so3);
std::cout << R_v <<std::endl;// 李代数so3 <- 三维反对称矩阵R_v
Eigen::Vector3d so3_Rv = Sophus::SO3d::vee(R_v);
std::cout << so3_Rv.transpose()<<std::endl;// 5.增加扰动
Eigen::Vector3d update_so3(1e-4,0,0);//增加扰动
Sophus::SO3d SO3_updated=Sophus::SO3d::exp(update_so3)*SO3_R;
std::cout<<SO3_updated.matrix()<<std::endl;}voidfunc_2(){// 李群SE3和变换矩阵T和李代数se3// 1.(旋转矩阵R,平移向量t) <-> 李群SE3
Eigen::Vector3d t(1,0,0);
Eigen::Matrix3d R =Eigen::AngleAxisd(M_PI/2,Eigen::Vector3d::UnitZ()).toRotationMatrix();// (旋转矩阵R,平移向量t) -> 李群SE3
Sophus::SE3d SE3_Rt(R,t);
std::cout<<SE3_Rt.matrix()<<std::endl;// 矩阵的组成是[R,t;0,1]// (旋转矩阵R,平移向量t) <- 李群SE3
Eigen::Matrix3d R_ = SE3_Rt.matrix().block<3,3>(0,0);
Eigen::Vector3d t_ = SE3_Rt.matrix().block<3,1>(0,3);
std::cout<<R_<<std::endl;
std::cout<<t_<<std::endl;// 2.(四元数q,平移向量t) -> 李群SE3
Eigen::Quaterniond q(R);
Sophus::SE3d SE3_qt(q,t);
std::cout<<SE3_qt.matrix()<<std::endl;// 3.李群SE3 <-> 李代数se3// 李群SE3 -> 李代数se3
Sophus::Vector6d se3 = SE3_Rt.log();//Eigen库中没有预先定义6维向量,可以使用Sophus库中定义的
std::cout<<se3.transpose()<<std::endl;//平移在前而旋转在后,这里的平移并不是真正空间上的平移// 李群SE3 <- 李代数se3
Sophus::SE3d SE3_se3 = Sophus::SE3d::exp(se3);
std::cout<<SE3_se3.matrix()<<std::endl;// 4.李代数se3 <-> 反对称矩阵R_v// 李代数se3 -> 反对称矩阵R_v
Sophus::Matrix4d R_v = Sophus::SE3d::hat(se3);
std::cout<<R_v<<std::endl;// 李代数se3 <- 反对称矩阵R_v
Sophus::Vector6d se3_Rv = Sophus::SE3d::vee(R_v);
std::cout<<se3_Rv.transpose()<<std::endl;// 5.增加扰动
Sophus::Vector6d update_se3;
update_se3.setZero();update_se3(1,0)=1e-4;
Sophus::SE3d SE3_updated=Sophus::SE3d::exp(update_se3)*SE3_Rt;
std::cout<<SE3_updated.matrix()<<std::endl;}
使用总结如下: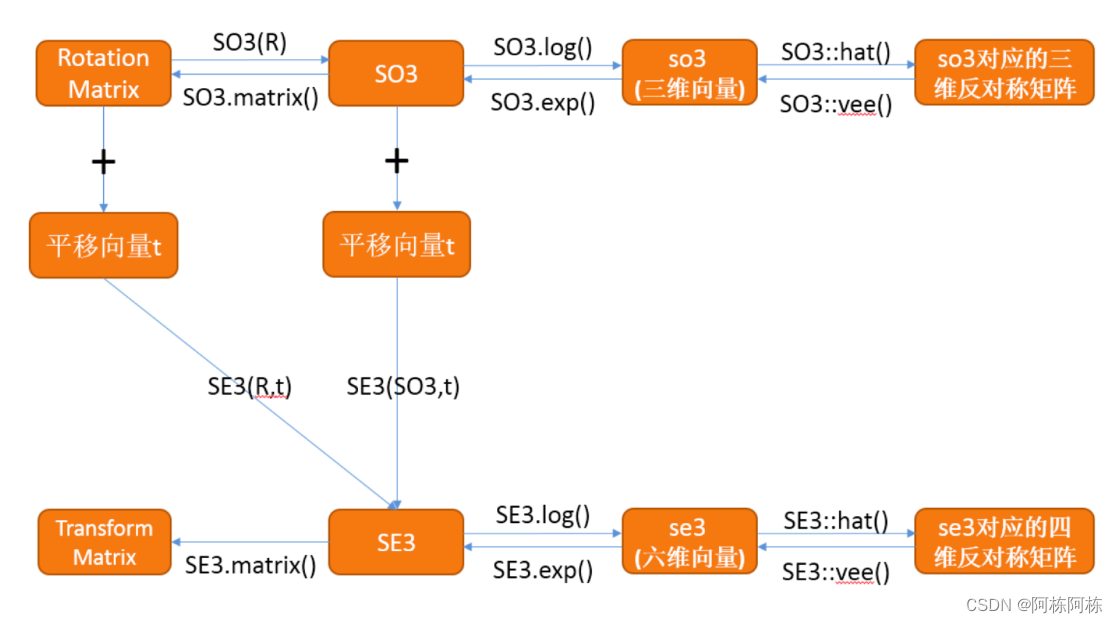
版权归原作者 阿栋阿栋 所有, 如有侵权,请联系我们删除。