
1.下载rplidar的功能包,放到catkin_ws的src下,进行编译:
https://github.com/Slamtec/rplidar_ros.git 去该网站下载下来后直接放到工作空间中编译千万不要将其当成一个单独的工作空间,它只是一个功能包!!!
cd ~/catkin_ws
catkin_make
2.设置源:
cd ~/catkin_ws
source devel/setup.bash
3.设置权限
sudo chmod 777 /dev/ttyUSB0
4.启动激光雷达并使用rviz实现可视化
roslaunch rplidar_ros view_rplidar_a3.launch
这时激光雷达应该转起来,并启动rviz界面,在终端使用ctrl+c键停止
5.按照古月居提供的ros九讲中的第六讲或百度航天智慧物流比赛中提供的技术支持自行安装好cartographer算法功能包,注意一定要将其单独放在一个工作空间下。
该功能包编译使用以下指令:
catkin_make_isolated --install --use-ninja
6.编译好功能包后,修改revo_lds.lua文件路径:
cartographer_ws/src/cartographer_ros/cartographer_ros/configuration_files/revo_lds.lua
修改之前文件内容如下图
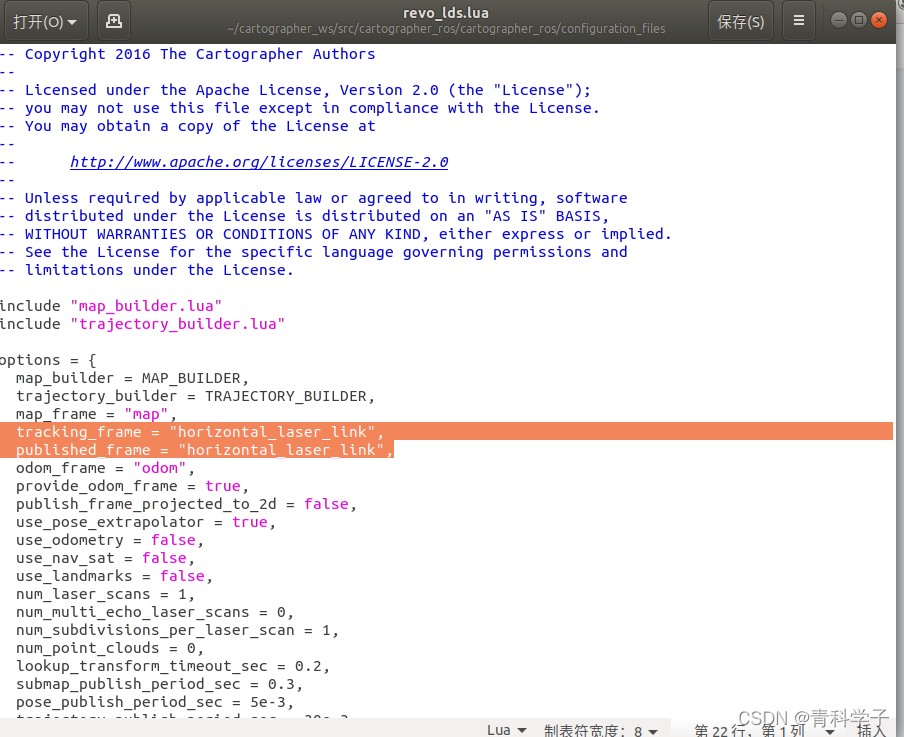
修改以下两句:
tracking_frame = "horizontal_laser_link",
published_frame = "horizontal_laser_link",
"horizontal_laser_link"改成自己激光雷达的frame_id,我的是laser
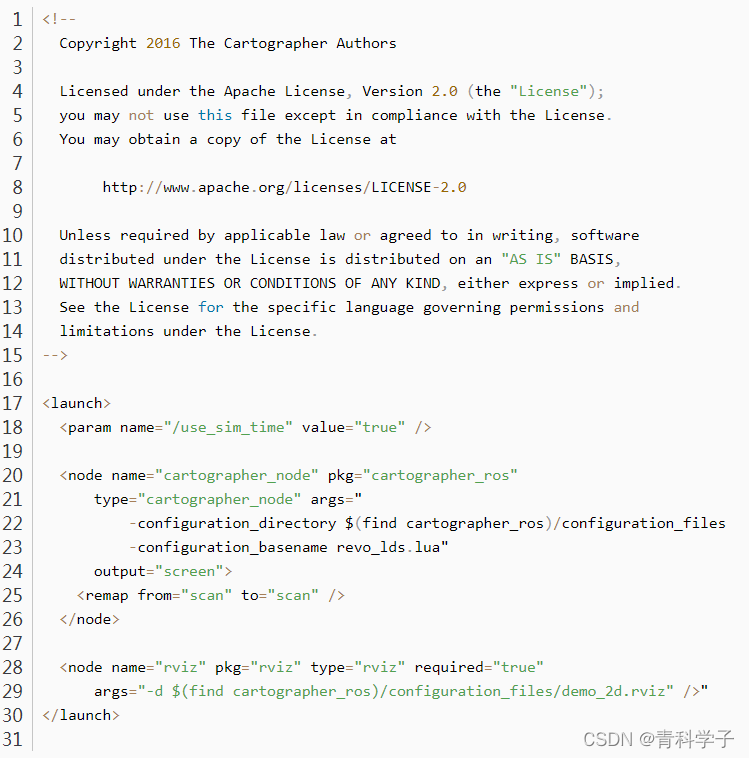
7.修改demo_revo_lds.launch文件,文件路径:
cartographer_ws/src/cartographer_ros/cartographer_ros/launch/demo_revo_lds.launch
8.编译修改完后的cartographer功能包
catkin_make_isolated --install --use-ninja
接下来实现cartographer算法slam
1.设置源
source ~/catkin_ws/devel/setup.bash
2.设置权限
sudo chmod 777 /dev/ttyUSB0
3.只运行激光雷达
roslaunch rplidar_ros rplidar_a3.launch
此时激光雷达应该转起来
4.再开一个终端,设置源(存放cartographer功能包的!!!)
source ~/google_ws/devel_isolated/setup.bash
我用的是古月居提供的功能包
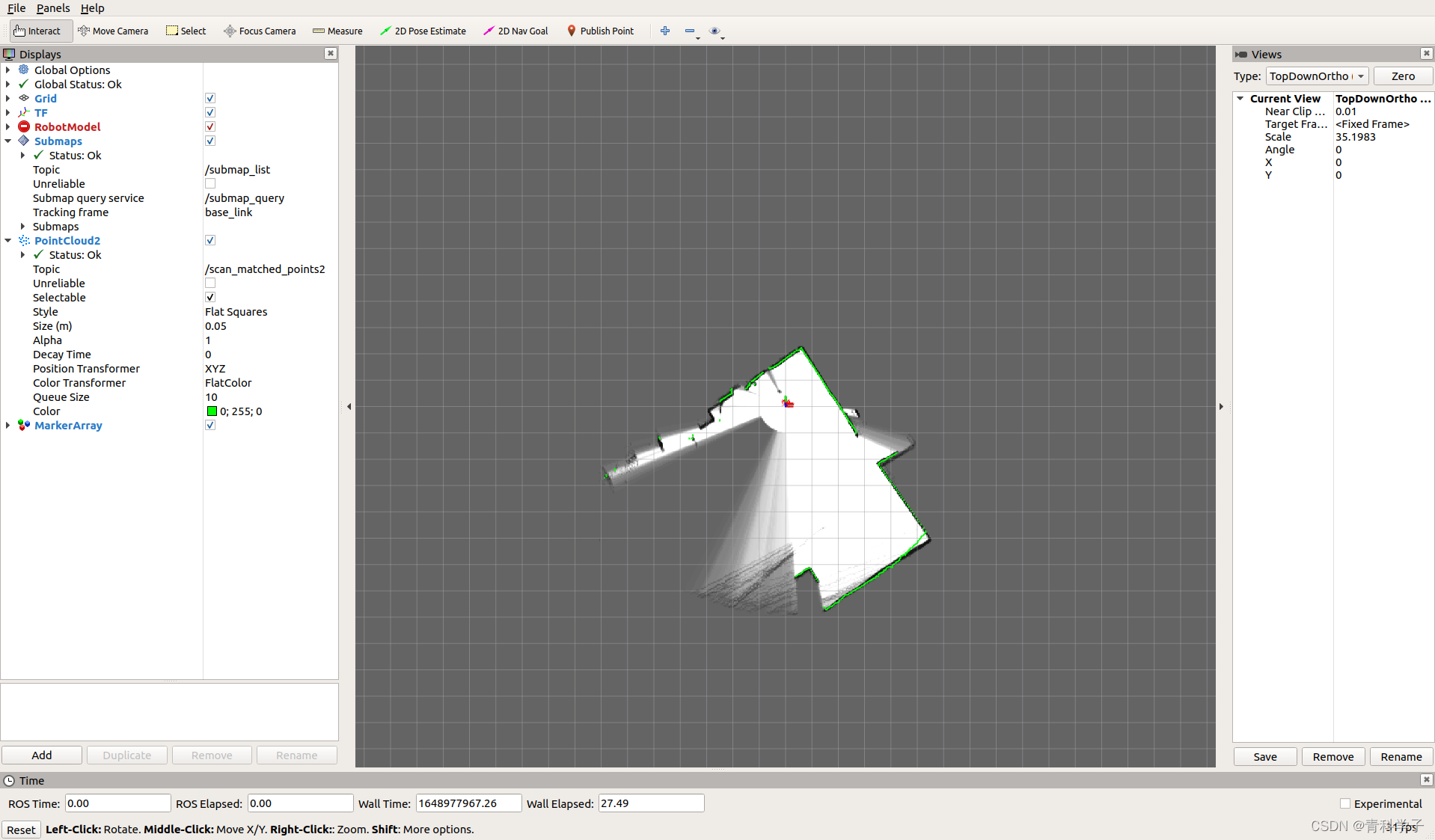
5.启用cartographer算法进行Slam
roslaunch cartographer_ros demo_revo_lds.launch
请看效果图(本图中激光雷达并没有移动所以建图不完整!!)
版权归原作者 青科学子 所有, 如有侵权,请联系我们删除。