
扩散模型 (Diffusion Model) 简要介绍与源码分析
文章目录
前言
近期同事分享了 Diffusion Model, 这才发现生成模型的发展已经到了如此惊人的地步, OpenAI 推出的 Dall-E 2 可以根据文本描述生成极为逼真的图像, 质量之高直让人惊呼哇塞. 今早公众号给我推送了一篇关于 Stability AI 公司的报道, 他们推出的 AI 文生图扩散模型 Stable Diffusion 已开源, 能够在消费级显卡上实现 Dall-E 2 级别的图像生成, 效率提升了 30 倍.
于是找到他们的开源产品体验了一把, 在线体验地址在 https://huggingface.co/spaces/stabilityai/stable-diffusion (开源代码在 Github 上: https://github.com/CompVis/stable-diffusion), 在搜索框中输入 “A dog flying in the sky” (一只狗在天空飞翔), 生成效果如下:

Amazing! 当然, 不是每一张图片都符合预期, 但好在可以生成无数张图片, 其中总有效果好的. 在震惊之余, 不免对 Diffusion Model (扩散模型) 背后的原理感兴趣, 就想看看是怎么实现的.
当时同事分享时, PPT 上那一堆堆公式扑面而来, 把我给整懵圈了, 但还是得撑起下巴, 表现出似有所悟、深以为然的样子, 在讲到关键处不由暗暗点头以表示理解和赞许. 后面花了个周末专门学习了一下, 公式推导+代码分析, 感觉终于了解了基本概念, 于是记录下来形成此文, 不敢说自己完全懂了, 毕竟我不做这个方向, 但回过头去看 PPT 上的公式就不再发怵了.
广而告之
可以在微信中搜索 “珍妮的算法之路” 或者 “world4458” 关注我的微信公众号, 可以及时获取最新原创技术文章更新.
另外可以看看知乎专栏 PoorMemory-机器学习, 以后文章也会发在知乎专栏中.
总览
本文对 Diffusion Model 扩散模型的原理进行简要介绍, 然后对源码进行分析. 扩散模型的实现有多种形式, 本文关注的是 DDPM (denoising diffusion probabilistic models). 在介绍完基本原理后, 对作者释放的 Tensorflow 源码进行分析, 加深对各种公式的理解.
参考文章
在理解扩散模型的路上, 受到下面这些文章的启发, 强烈推荐阅读:
- Lilian 的博客, 内容非常非常详实, 干货十足, 而且每篇文章都极其用心, 向大佬学习: What are Diffusion Models?
- ewrfcas 的知乎, 公式推导补充了更多的细节: 由浅入深了解Diffusion Model
- Lilian 的博客, 介绍变分自动编码器 VAE: From Autoencoder to Beta-VAE, Diffusion Model 需要从分布中随机采样样本, 该过程无法求导, 需要使用到 VAE 中介绍的重参数技巧.
- Denoising Diffusion Probabilistic Models 论文, - 其 TF 源码位于: https://github.com/hojonathanho/diffusion, 源码介绍以该版本为主- PyTorch 的开源实现: https://github.com/lucidrains/denoising-diffusion-pytorch, 核心逻辑和上面 Tensorflow 版本是一致的, Stable Diffusion 参考的是 pytorch 版本的代码.
扩散模型介绍
基本原理
Diffusion Model (扩散模型) 是一类生成模型, 和 VAE (Variational Autoencoder, 变分自动编码器), GAN (Generative Adversarial Network, 生成对抗网络) 等生成网络不同的是, 扩散模型在前向阶段对图像逐步施加噪声, 直至图像被破坏变成完全的高斯噪声, 然后在逆向阶段学习从高斯噪声还原为原始图像的过程.
具体来说, 前向阶段在原始图像
x
0
\mathbf{x}_0
x0 上逐步增加噪声, 每一步得到的图像
x
t
\mathbf{x}_t
xt 只和上一步的结果
x
t
−
1
\mathbf{x}_{t - 1}
xt−1 相关, 直至第
T
T
T 步的图像
x
T
\mathbf{x}_T
xT 变为纯高斯噪声. 前向阶段图示如下:

而逆向阶段则是不断去除噪声的过程, 首先给定高斯噪声
x
T
\mathbf{x}_T
xT, 通过逐步去噪, 直至最终将原图像
x
0
\mathbf{x}_0
x0 给恢复出来, 逆向阶段图示如下:

模型训练完成后, 只要给定高斯随机噪声, 就可以生成一张从未见过的图像. 下面分别介绍前向阶段和逆向阶段, 只列出重要公式,
前向阶段
由于前向过程中图像
x
t
\mathbf{x}_t
xt 只和上一时刻的
x
t
−
1
\mathbf{x}_{t - 1}
xt−1 有关, 该过程可以视为马尔科夫过程, 满足:
q
(
x
1
:
T
∣
x
0
)
=
∏
t
=
1
T
q
(
x
t
∣
x
t
−
1
)
q
(
x
t
∣
x
t
−
1
)
=
N
(
x
t
;
1
−
β
t
x
t
−
1
,
β
t
I
)
,
\begin{align} q\left(x_{1: T} \mid x_0\right) &=\prod_{t=1}^T q\left(x_t \mid x_{t-1}\right) \\ q\left(x_t \mid x_{t-1}\right) &=\mathcal{N}\left(x_t ; \sqrt{1-\beta_t} x_{t-1}, \beta_t \mathbf{I}\right), \end{align}
q(x1:T∣x0)q(xt∣xt−1)=t=1∏Tq(xt∣xt−1)=N(xt;1−βtxt−1,βtI),
其中
β
t
∈
(
0
,
1
)
\beta_t\in(0, 1)
βt∈(0,1) 为高斯分布的方差超参, 并满足
β
1
<
β
2
<
…
<
β
T
\beta_1 < \beta_2 < \ldots < \beta_T
β1<β2<…<βT. 另外公式 (2) 中为何均值
x
t
−
1
x_{t-1}
xt−1 前乘上系数
1
−
β
t
x
t
−
1
\sqrt{1-\beta_t} x_{t-1}
1−βtxt−1 的原因将在后面的推导介绍. 上述过程的一个美妙性质是我们可以在任意 time step 下通过 重参数技巧 采样得到
x
t
x_t
xt.
重参数技巧 (reparameterization trick) 是为了解决随机采样样本这一过程无法求导的问题. 比如要从高斯分布
z
∼
N
(
z
;
μ
,
σ
2
I
)
z \sim \mathcal{N}(z; \mu, \sigma^2\mathbf{I})
z∼N(z;μ,σ2I) 中采样样本
z
z
z, 可以通过引入随机变量
ϵ
∼
N
(
0
,
I
)
\epsilon\sim\mathcal{N}(0, \mathbf{I})
ϵ∼N(0,I), 使得
z
=
μ
+
σ
⊙
ϵ
z = \mu + \sigma\odot\epsilon
z=μ+σ⊙ϵ, 此时
z
z
z 依旧具有随机性, 且服从高斯分布
N
(
μ
,
σ
2
I
)
\mathcal{N}(\mu, \sigma^2\mathbf{I})
N(μ,σ2I), 同时
μ
\mu
μ 与
σ
\sigma
σ (通常由网络生成) 可导.
简要了解了重参数技巧后, 再回到上面通过公式 (2) 采样
x
t
x_t
xt 的方法, 即生成随机变量
ϵ
t
∼
N
(
0
,
I
)
\epsilon_t\sim\mathcal{N}(0, \mathbf{I})
ϵt∼N(0,I),
然后令
α
t
=
1
−
β
t
\alpha_t = 1 - \beta_t
αt=1−βt, 以及
α
t
‾
=
∏
i
=
1
T
α
t
\overline{\alpha_t} = \prod_{i=1}^{T}\alpha_t
αt=∏i=1Tαt, 从而可以得到:
x
t
=
1
−
β
t
x
t
−
1
+
β
t
ϵ
1
where
ϵ
1
,
ϵ
2
,
…
∼
N
(
0
,
I
)
,
reparameter trick
;
=
a
t
x
t
−
1
+
1
−
α
t
ϵ
1
=
a
t
(
a
t
−
1
x
t
−
2
+
1
−
α
t
−
1
ϵ
2
)
+
1
−
α
t
ϵ
1
=
a
t
a
t
−
1
x
t
−
2
+
(
a
t
(
1
−
α
t
−
1
)
ϵ
2
+
1
−
α
t
ϵ
1
)
=
a
t
a
t
−
1
x
t
−
2
+
1
−
α
t
α
t
−
1
ϵ
ˉ
2
where
ϵ
ˉ
2
∼
N
(
0
,
I
)
;
=
…
=
α
ˉ
t
x
0
+
1
−
α
ˉ
t
ϵ
ˉ
t
.
\begin{align} x_t &= \sqrt{1 - \beta_t} x_{t-1}+\beta_t \epsilon_1 \quad \text { where } \; \epsilon_1, \epsilon_2, \ldots \sim \mathcal{N}(0, \mathbf{I}), \; \text{reparameter trick} ; \nonumber \\ &=\sqrt{a_t} x_{t-1}+\sqrt{1-\alpha_t} \epsilon_1\nonumber \\ &=\sqrt{a_t}\left(\sqrt{a_{t-1}} x_{t-2}+\sqrt{1-\alpha_{t-1}} \epsilon_2\right)+\sqrt{1-\alpha_t} \epsilon_1 \nonumber \\ &=\sqrt{a_t a_{t-1}} x_{t-2}+\left(\sqrt{a_t\left(1-\alpha_{t-1}\right)} \epsilon_2+\sqrt{1-\alpha_t} \epsilon_1\right) \tag{3-1} \\ &=\sqrt{a_t a_{t-1}} x_{t-2}+\sqrt{1-\alpha_t \alpha_{t-1}} \bar{\epsilon}_2 \quad \text { where } \quad \bar{\epsilon}_2 \sim \mathcal{N}(0, \mathbf{I}) ; \tag{3-2} \\ &=\ldots \nonumber \\ &=\sqrt{\bar{\alpha}_t} x_0+\sqrt{1-\bar{\alpha}_t} \bar{\epsilon}_t. \end{align}
xt=1−βtxt−1+βtϵ1 where ϵ1,ϵ2,…∼N(0,I),reparameter trick;=atxt−1+1−αtϵ1=at(at−1xt−2+1−αt−1ϵ2)+1−αtϵ1=atat−1xt−2+(at(1−αt−1)ϵ2+1−αtϵ1)=atat−1xt−2+1−αtαt−1ϵˉ2 where ϵˉ2∼N(0,I);=…=αˉtx0+1−αˉtϵˉt.(3-1)(3-2)
其中公式 (3-1) 到公式 (3-2) 的推导是由于独立高斯分布的可见性, 有
N
(
0
,
σ
1
2
I
)
+
N
(
0
,
σ
2
2
I
)
∼
N
(
0
,
(
σ
1
2
+
σ
2
2
)
I
)
\mathcal{N}\left(0, \sigma_1^2\mathbf{I}\right) +\mathcal{N}\left(0,\sigma_2^2 \mathbf{I}\right)\sim\mathcal{N}\left(0, \left(\sigma_1^2 + \sigma_2^2\right)\mathbf{I}\right)
N(0,σ12I)+N(0,σ22I)∼N(0,(σ12+σ22)I), 因此:
a
t
(
1
−
α
t
−
1
)
ϵ
2
∼
N
(
0
,
a
t
(
1
−
α
t
−
1
)
I
)
1
−
α
t
ϵ
1
∼
N
(
0
,
(
1
−
α
t
)
I
)
a
t
(
1
−
α
t
−
1
)
ϵ
2
+
1
−
α
t
ϵ
1
∼
N
(
0
,
[
α
t
(
1
−
α
t
−
1
)
+
(
1
−
α
t
)
]
I
)
=
N
(
0
,
(
1
−
α
t
α
t
−
1
)
I
)
.
\begin{aligned} &\sqrt{a_t\left(1-\alpha_{t-1}\right)} \epsilon_2 \sim \mathcal{N}\left(0, a_t\left(1-\alpha_{t-1}\right) \mathbf{I}\right) \\ &\sqrt{1-\alpha_t} \epsilon_1 \sim \mathcal{N}\left(0,\left(1-\alpha_t\right) \mathbf{I}\right) \\ &\sqrt{a_t\left(1-\alpha_{t-1}\right)} \epsilon_2+\sqrt{1-\alpha_t} \epsilon_1 \sim \mathcal{N}\left(0,\left[\alpha_t\left(1-\alpha_{t-1}\right)+\left(1-\alpha_t\right)\right] \mathbf{I}\right) \\ &=\mathcal{N}\left(0,\left(1-\alpha_t \alpha_{t-1}\right) \mathbf{I}\right) . \end{aligned}
at(1−αt−1)ϵ2∼N(0,at(1−αt−1)I)1−αtϵ1∼N(0,(1−αt)I)at(1−αt−1)ϵ2+1−αtϵ1∼N(0,[αt(1−αt−1)+(1−αt)]I)=N(0,(1−αtαt−1)I).
注意公式 (3-2) 中
ϵ
ˉ
2
∼
N
(
0
,
I
)
\bar{\epsilon}_2 \sim \mathcal{N}(0, \mathbf{I})
ϵˉ2∼N(0,I), 因此还需乘上
1
−
α
t
α
t
−
1
\sqrt{1-\alpha_t \alpha_{t-1}}
1−αtαt−1. 从公式 (3) 可以看出
q
(
x
t
∣
x
0
)
=
N
(
x
t
;
a
ˉ
t
x
0
,
(
1
−
a
ˉ
t
)
I
)
\begin{align} q\left(x_t \mid x_0\right)=\mathcal{N}\left(x_t ; \sqrt{\bar{a}_t} x_0,\left(1-\bar{a}_t\right) \mathbf{I}\right) \end{align}
q(xt∣x0)=N(xt;aˉtx0,(1−aˉt)I)
注意由于
β
t
∈
(
0
,
1
)
\beta_t\in(0, 1)
βt∈(0,1) 且
β
1
<
…
<
β
T
\beta_1 < \ldots < \beta_T
β1<…<βT, 而
α
t
=
1
−
β
t
\alpha_t = 1 - \beta_t
αt=1−βt, 因此
α
t
∈
(
0
,
1
)
\alpha_t\in(0, 1)
αt∈(0,1) 并且有
α
1
>
…
>
α
T
\alpha_1 > \ldots>\alpha_T
α1>…>αT, 另外由于
α
ˉ
t
=
∏
i
=
1
T
α
t
\bar{\alpha}_t=\prod_{i=1}^T\alpha_t
αˉt=∏i=1Tαt, 因此当
T
→
∞
T\rightarrow\infty
T→∞ 时,
α
ˉ
t
→
0
\bar{\alpha}_t\rightarrow0
αˉt→0 以及
(
1
−
a
ˉ
t
)
→
1
(1-\bar{a}_t)\rightarrow 1
(1−aˉt)→1, 此时
x
T
∼
N
(
0
,
I
)
x_T\sim\mathcal{N}(0, \mathbf{I})
xT∼N(0,I). 从这里的推导来看, 在公式 (2) 中的均值
x
t
−
1
x_{t-1}
xt−1 前乘上系数
1
−
β
t
x
t
−
1
\sqrt{1-\beta_t} x_{t-1}
1−βtxt−1 会使得
x
T
x_{T}
xT 最后收敛到标准高斯分布.
逆向阶段
前向阶段是加噪声的过程, 而逆向阶段则是将噪声去除, 如果能得到逆向过程的分布
q
(
x
t
−
1
∣
x
t
)
q\left(x_{t-1} \mid x_t\right)
q(xt−1∣xt), 那么通过输入高斯噪声
x
T
∼
N
(
0
,
I
)
x_T\sim\mathcal{N}(0, \mathbf{I})
xT∼N(0,I), 我们将生成一个真实的样本. 注意到当
β
t
\beta_t
βt 足够小时,
q
(
x
t
−
1
∣
x
t
)
q\left(x_{t-1} \mid x_t\right)
q(xt−1∣xt) 也是高斯分布, 具体的证明在 ewrfcas 的知乎文章: 由浅入深了解Diffusion Model 推荐的论文中:
On the theory of stochastic processes, with particular reference to applications
. 我大致看了一下, 哈哈, 没太看明白, 不过想到这个不是我关注的重点, 因此 pass. 由于我们无法直接推断
q
(
x
t
−
1
∣
x
t
)
q\left(x_{t-1} \mid x_t\right)
q(xt−1∣xt), 因此我们将使用深度学习模型
p
θ
p_{\theta}
pθ 去拟合分布
q
(
x
t
−
1
∣
x
t
)
q\left(x_{t-1} \mid x_t\right)
q(xt−1∣xt), 模型参数为
θ
\theta
θ:
p
θ
(
x
0
:
T
)
=
p
(
x
T
)
∏
t
=
1
T
p
θ
(
x
t
−
1
∣
x
t
)
p
θ
(
x
t
−
1
∣
x
t
)
=
N
(
x
t
−
1
;
μ
θ
(
x
t
,
t
)
,
Σ
θ
(
x
t
,
t
)
)
\begin{align} p_\theta\left(x_{0: T}\right) &=p\left(x_T\right) \prod_{t=1}^T p_\theta\left(x_{t-1} \mid x_t\right) \\ p_\theta\left(x_{t-1} \mid x_t\right) &=\mathcal{N}\left(x_{t-1} ; \mu_\theta\left(x_t, t\right), \Sigma_\theta\left(x_t, t\right)\right) \end{align}
pθ(x0:T)pθ(xt−1∣xt)=p(xT)t=1∏Tpθ(xt−1∣xt)=N(xt−1;μθ(xt,t),Σθ(xt,t))
注意到, 虽然我们无法直接求得
q
(
x
t
−
1
∣
x
t
)
q\left(x_{t-1} \mid x_t\right)
q(xt−1∣xt) (注意这里是
q
q
q 而不是模型
p
θ
p_{\theta}
pθ), 但在知道
x
0
x_0
x0 的情况下, 可以通过贝叶斯公式得到
q
(
x
t
−
1
∣
x
t
,
x
0
)
q\left(x_{t-1} \mid x_t, x_0\right)
q(xt−1∣xt,x0) 为:
q
(
x
t
−
1
∣
x
t
,
x
0
)
=
N
(
x
t
−
1
;
μ
~
(
x
t
,
x
0
)
,
β
~
t
I
)
\begin{align} q\left(x_{t-1} \mid x_t, x_0\right) &= \mathcal{N}\left(x_{t-1} ; {\color{blue}{\tilde{\mu}}(x_t, x_0)}, {\color{red}{\tilde{\beta}_t} \mathbf{I}}\right) \end{align}
q(xt−1∣xt,x0)=N(xt−1;μ~(xt,x0),β~tI)
推导过程如下:
q
(
x
t
−
1
∣
x
t
,
x
0
)
=
q
(
x
t
∣
x
t
−
1
,
x
0
)
q
(
x
t
−
1
∣
x
0
)
q
(
x
t
∣
x
0
)
∝
exp
(
−
1
2
(
(
x
t
−
α
t
x
t
−
1
)
2
β
t
+
(
x
t
−
1
−
α
ˉ
t
−
1
x
0
)
2
1
−
α
ˉ
t
−
1
−
(
x
t
−
α
ˉ
t
x
0
)
2
1
−
α
ˉ
t
)
)
=
exp
(
−
1
2
(
x
t
2
−
2
α
t
x
t
x
t
−
1
+
α
t
x
t
−
1
2
β
t
+
x
t
−
1
2
−
2
α
ˉ
t
−
1
x
0
x
t
−
1
+
α
ˉ
t
−
1
x
0
2
1
−
α
ˉ
t
−
1
−
(
x
t
−
α
ˉ
t
x
0
)
2
1
−
α
ˉ
t
)
)
=
exp
(
−
1
2
(
(
α
t
β
t
+
1
1
−
α
ˉ
t
−
1
)
x
t
−
1
2
⏟
x
t
−
1
方差
−
(
2
α
t
β
t
x
t
+
2
α
ˉ
t
−
1
1
−
α
ˉ
t
−
1
x
0
)
x
t
−
1
⏟
x
t
−
1
均值
+
C
(
x
t
,
x
0
)
⏟
与
x
t
−
1
无关
)
)
\begin{aligned} q(x_{t-1} \vert x_t, x_0) &= q(x_t \vert x_{t-1}, x_0) \frac{ q(x_{t-1} \vert x_0) }{ q(x_t \vert x_0) } \\ &\propto \exp \Big(-\frac{1}{2} \big(\frac{(x_t - \sqrt{\alpha_t} x_{t-1})^2}{\beta_t} + \frac{(x_{t-1} - \sqrt{\bar{\alpha}_{t-1}} x_0)^2}{1-\bar{\alpha}_{t-1}} - \frac{(x_t - \sqrt{\bar{\alpha}_t} x_0)^2}{1-\bar{\alpha}_t} \big) \Big) \\ &= \exp \Big(-\frac{1}{2} \big(\frac{x_t^2 - 2\sqrt{\alpha_t} x_t \color{blue}{x_{t-1}} \color{black}{+ \alpha_t} \color{red}{x_{t-1}^2} }{\beta_t} + \frac{ \color{red}{x_{t-1}^2} \color{black}{- 2 \sqrt{\bar{\alpha}_{t-1}} x_0} \color{blue}{x_{t-1}} \color{black}{+ \bar{\alpha}_{t-1} x_0^2} }{1-\bar{\alpha}_{t-1}} - \frac{(x_t - \sqrt{\bar{\alpha}_t} x_0)^2}{1-\bar{\alpha}_t} \big) \Big) \\ &= \exp\Big( -\frac{1}{2} \big( \underbrace{\color{red}{(\frac{\alpha_t}{\beta_t} + \frac{1}{1 - \bar{\alpha}_{t-1}})} x_{t-1}^2}_{x_{t-1} \text { 方差 }} - \underbrace{\color{blue}{(\frac{2\sqrt{\alpha_t}}{\beta_t} x_t + \frac{2\sqrt{\bar{\alpha}_{t-1}}}{1 - \bar{\alpha}_{t-1}} x_0)} x_{t-1}}_{x_{t-1} \text { 均值 }} + \underbrace{{\color{black}{ C(x_t, x_0)}}}_{\text {与 } x_{t-1} \text { 无关 }} \big) \Big) \end{aligned}
q(xt−1∣xt,x0)=q(xt∣xt−1,x0)q(xt∣x0)q(xt−1∣x0)∝exp(−21(βt(xt−αtxt−1)2+1−αˉt−1(xt−1−αˉt−1x0)2−1−αˉt(xt−αˉtx0)2))=exp(−21(βtxt2−2αtxtxt−1+αtxt−12+1−αˉt−1xt−12−2αˉt−1x0xt−1+αˉt−1x02−1−αˉt(xt−αˉtx0)2))=exp(−21(xt−1 方差 (βtαt+1−αˉt−11)xt−12−xt−1 均值 (βt2αtxt+1−αˉt−12αˉt−1x0)xt−1+与 xt−1 无关 C(xt,x0)))
上面推导过程中, 通过贝叶斯公式巧妙的将逆向过程转换为前向过程, 且最终得到的概率密度函数和高斯概率密度函数的指数部分
exp
(
−
(
x
−
μ
)
2
2
σ
2
)
=
exp
(
−
1
2
(
1
σ
2
x
2
−
2
μ
σ
2
x
+
μ
2
σ
2
)
)
\exp{\left(-\frac{\left(x - \mu\right)^2}{2\sigma^2}\right)} = \exp{\left(-\frac{1}{2}\left(\frac{1}{\sigma^2}x^2 - \frac{2\mu}{\sigma^2}x + \frac{\mu^2}{\sigma^2}\right)\right)}
exp(−2σ2(x−μ)2)=exp(−21(σ21x2−σ22μx+σ2μ2)) 能对应, 即有:
β
~
t
=
1
/
(
α
t
β
t
+
1
1
−
α
ˉ
t
−
1
)
=
1
/
(
α
t
−
α
ˉ
t
+
β
t
β
t
(
1
−
α
ˉ
t
−
1
)
)
=
1
−
α
ˉ
t
−
1
1
−
α
ˉ
t
⋅
β
t
μ
~
t
(
x
t
,
x
0
)
=
(
α
t
β
t
x
t
+
α
ˉ
t
−
1
1
−
α
ˉ
t
−
1
x
0
)
/
(
α
t
β
t
+
1
1
−
α
ˉ
t
−
1
)
=
(
α
t
β
t
x
t
+
α
ˉ
t
−
1
1
−
α
ˉ
t
−
1
x
0
)
1
−
α
ˉ
t
−
1
1
−
α
ˉ
t
⋅
β
t
=
α
t
(
1
−
α
ˉ
t
−
1
)
1
−
α
ˉ
t
x
t
+
α
ˉ
t
−
1
β
t
1
−
α
ˉ
t
x
0
\begin{align} \tilde{\beta}_t &= 1/(\frac{\alpha_t}{\beta_t} + \frac{1}{1 - \bar{\alpha}_{t-1}}) = 1/(\frac{\alpha_t - \bar{\alpha}_t + \beta_t}{\beta_t(1 - \bar{\alpha}_{t-1})}) = \color{green}{\frac{1 - \bar{\alpha}_{t-1}}{1 - \bar{\alpha}_t} \cdot \beta_t} \\ \tilde{\mu}_t (x_t, x_0) &= (\frac{\sqrt{\alpha_t}}{\beta_t} x_t + \frac{\sqrt{\bar{\alpha}_{t-1} }}{1 - \bar{\alpha}_{t-1}} x_0)/(\frac{\alpha_t}{\beta_t} + \frac{1}{1 - \bar{\alpha}_{t-1}}) \nonumber\\ &= (\frac{\sqrt{\alpha_t}}{\beta_t} x_t + \frac{\sqrt{\bar{\alpha}_{t-1} }}{1 - \bar{\alpha}_{t-1}} x_0) \color{green}{\frac{1 - \bar{\alpha}_{t-1}}{1 - \bar{\alpha}_t} \cdot \beta_t}\nonumber \\ &= \frac{\sqrt{\alpha_t}(1 - \bar{\alpha}_{t-1})}{1 - \bar{\alpha}_t} x_t + \frac{\sqrt{\bar{\alpha}_{t-1}}\beta_t}{1 - \bar{\alpha}_t} x_0\\ \end{align}
β~tμ~t(xt,x0)=1/(βtαt+1−αˉt−11)=1/(βt(1−αˉt−1)αt−αˉt+βt)=1−αˉt1−αˉt−1⋅βt=(βtαtxt+1−αˉt−1αˉt−1x0)/(βtαt+1−αˉt−11)=(βtαtxt+1−αˉt−1αˉt−1x0)1−αˉt1−αˉt−1⋅βt=1−αˉtαt(1−αˉt−1)xt+1−αˉtαˉt−1βtx0
通过公式 (8) 和公式 (9), 我们能得到
q
(
x
t
−
1
∣
x
t
,
x
0
)
q\left(x_{t-1} \mid x_t, x_0\right)
q(xt−1∣xt,x0) (见公式 (7)) 的分布. 此外由于公式 (3) 揭示的
x
t
x_t
xt 和
x
0
x_0
x0 之间的关系:
x
t
=
α
ˉ
t
x
0
+
1
−
α
ˉ
t
ϵ
ˉ
t
x_t =\sqrt{\bar{\alpha}_t} x_0+\sqrt{1-\bar{\alpha}_t} \bar{\epsilon}_t
xt=αˉtx0+1−αˉtϵˉt, 可以得到
x
0
=
1
α
ˉ
t
(
x
t
−
1
−
α
ˉ
t
ϵ
t
)
\begin{align} x_0 = \frac{1}{\sqrt{\bar{\alpha}_t}}(x_t - \sqrt{1 - \bar{\alpha}_t}\epsilon_t) \end{align}
x0=αˉt1(xt−1−αˉtϵt)
代入公式 (9) 中得到:
μ
~
t
=
α
t
(
1
−
α
ˉ
t
−
1
)
1
−
α
ˉ
t
x
t
+
α
ˉ
t
−
1
β
t
1
−
α
ˉ
t
1
α
ˉ
t
(
x
t
−
1
−
α
ˉ
t
ϵ
t
)
=
1
α
t
(
x
t
−
1
−
α
t
1
−
α
ˉ
t
ϵ
t
)
\begin{align} \tilde{\mu}_t &= \frac{\sqrt{\alpha_t}(1 - \bar{\alpha}_{t-1})}{1 - \bar{\alpha}_t} x_t + \frac{\sqrt{\bar{\alpha}_{t-1}}\beta_t}{1 - \bar{\alpha}_t} \frac{1}{\sqrt{\bar{\alpha}_t}}(x_t - \sqrt{1 - \bar{\alpha}_t}\epsilon_t)\nonumber \\ &= \color{cyan}{\frac{1}{\sqrt{\alpha_t}} \Big( x_t - \frac{1 - \alpha_t}{\sqrt{1 - \bar{\alpha}_t}} \epsilon_t \Big)} \end{align}
μ~t=1−αˉtαt(1−αˉt−1)xt+1−αˉtαˉt−1βtαˉt1(xt−1−αˉtϵt)=αt1(xt−1−αˉt1−αtϵt)
补充一下公式 (11) 的详细推导过程:

前面说到, 我们将使用深度学习模型
p
θ
p_{\theta}
pθ 去拟合逆向过程的分布
q
(
x
t
−
1
∣
x
t
)
q\left(x_{t-1} \mid x_t\right)
q(xt−1∣xt), 由公式 (6) 知
p
θ
(
x
t
−
1
∣
x
t
)
=
N
(
x
t
−
1
;
μ
θ
(
x
t
,
t
)
,
Σ
θ
(
x
t
,
t
)
)
p_\theta\left(x_{t-1} \mid x_t\right) =\mathcal{N}\left(x_{t-1} ; \mu_\theta\left(x_t, t\right), \Sigma_\theta\left(x_t, t\right)\right)
pθ(xt−1∣xt)=N(xt−1;μθ(xt,t),Σθ(xt,t)), 我们希望训练模型
μ
θ
(
x
t
,
t
)
\mu_\theta\left(x_t, t\right)
μθ(xt,t) 以预估
μ
~
t
=
1
α
t
(
x
t
−
1
−
α
t
1
−
α
ˉ
t
ϵ
t
)
\tilde{\mu}_t = \frac{1}{\sqrt{\alpha_t}} \Big( x_t - \frac{1 - \alpha_t}{\sqrt{1 - \bar{\alpha}_t}} \epsilon_t \Big)
μ~t=αt1(xt−1−αˉt1−αtϵt). 由于
x
t
x_t
xt 在训练阶段会作为输入, 因此它是已知的, 我们可以转而让模型去预估噪声
ϵ
t
\epsilon_t
ϵt, 即令:
μ
θ
(
x
t
,
t
)
=
1
α
t
(
x
t
−
1
−
α
t
1
−
α
ˉ
t
ϵ
θ
(
x
t
,
t
)
)
Thus
x
t
−
1
=
N
(
x
t
−
1
;
1
α
t
(
x
t
−
1
−
α
t
1
−
α
ˉ
t
ϵ
θ
(
x
t
,
t
)
)
,
Σ
θ
(
x
t
,
t
)
)
\begin{align} \mu_\theta(x_t, t) &= \color{cyan}{\frac{1}{\sqrt{\alpha_t}} \Big( x_t - \frac{1 - \alpha_t}{\sqrt{1 - \bar{\alpha}_t}} \epsilon_\theta(x_t, t) \Big)} \\ \text{Thus }x_{t-1} &= \mathcal{N}(x_{t-1}; \frac{1}{\sqrt{\alpha_t}} \Big( x_t - \frac{1 - \alpha_t}{\sqrt{1 - \bar{\alpha}_t}} \epsilon_\theta(x_t, t) \Big), \boldsymbol{\Sigma}_\theta(x_t, t)) \end{align}
μθ(xt,t)Thus xt−1=αt1(xt−1−αˉt1−αtϵθ(xt,t))=N(xt−1;αt1(xt−1−αˉt1−αtϵθ(xt,t)),Σθ(xt,t))
模型训练
前面谈到, 逆向阶段让模型去预估噪声
ϵ
θ
(
x
t
,
t
)
\epsilon_\theta(x_t, t)
ϵθ(xt,t), 那么应该如何设计 Loss 函数 ? 我们的目标是在真实数据分布下, 最大化模型预测分布的对数似然, 即优化在
x
0
∼
q
(
x
0
)
x_0\sim q(x_0)
x0∼q(x0) 下的
p
θ
(
x
0
)
p_\theta(x_0)
pθ(x0) 交叉熵:
L
=
E
q
(
x
0
)
[
−
log
p
θ
(
x
0
)
]
\begin{align} \mathcal{L} = \mathbb{E}_{q(x_0)}\left[-\log{p_\theta(x_0)}\right] \end{align}
L=Eq(x0)[−logpθ(x0)]
和 变分自动编码器 VAE 类似, 使用 Variational Lower Bound 来优化:
−
log
p
θ
(
x
0
)
-\log{p_\theta(x_0)}
−logpθ(x0) :
−
log
p
θ
(
x
0
)
≤
−
log
p
θ
(
x
0
)
+
D
K
L
(
q
(
x
1
:
T
∣
x
0
)
∥
p
θ
(
x
1
:
T
∣
x
0
)
)
;
注: 注意KL散度非负
=
−
log
p
θ
(
x
0
)
+
E
q
(
x
1
:
T
∣
x
0
)
[
log
q
(
x
1
:
T
∣
x
0
)
p
θ
(
x
0
:
T
)
/
p
θ
(
x
0
)
]
;
where
p
θ
(
x
1
:
T
∣
x
0
)
=
p
θ
(
x
0
:
T
)
p
θ
(
x
0
)
=
−
log
p
θ
(
x
0
)
+
E
q
(
x
1
:
T
∣
x
0
)
[
log
q
(
x
1
:
T
∣
x
0
)
p
θ
(
x
0
:
T
)
+
log
p
θ
(
x
0
)
⏟
与q无关
]
=
E
q
(
x
1
:
T
∣
x
0
)
[
log
q
(
x
1
:
T
∣
x
0
)
p
θ
(
x
0
:
T
)
]
.
\begin{align} -\log p_\theta\left(x_0\right) &\leq-\log p_\theta\left(x_0\right)+D_{K L}\left(q\left(x_{1: T} \mid x_0\right) \| p_\theta\left(x_{1: T} \mid x_0\right)\right); \quad \text{注: 注意KL散度非负}\nonumber\\ &=-\log p_\theta\left(x_0\right)+\mathbb{E}_{q\left(x_{1: T} \mid x_0\right)}\left[\log \frac{q\left(x_{1: T} \mid x_0\right)}{p_\theta\left(x_{0: T}\right) / p_\theta\left(x_0\right)}\right] ; \; \text { where } \; p_\theta\left(x_{1: T} \mid x_0\right)=\frac{p_\theta\left(x_{0: T}\right)}{p_\theta\left(x_0\right)}\nonumber\\ &=-\log p_\theta\left(x_0\right)+\mathbb{E}_{q\left(x_{1: T} \mid x_0\right)}[\log \frac{q\left(x_{1: T} \mid x_0\right)}{p_\theta\left(x_{0: T}\right)}+\underbrace{\log p_\theta\left(x_0\right)}_{\text {与q无关 }}]\nonumber\\ &=\mathbb{E}_{q\left(x_{1: T} \mid x_0\right)}\left[\log \frac{q\left(x_{1: T} \mid x_0\right)}{p_\theta\left(x_{0: T}\right)}\right] . \end{align}
−logpθ(x0)≤−logpθ(x0)+DKL(q(x1:T∣x0)∥pθ(x1:T∣x0));注: 注意KL散度非负=−logpθ(x0)+Eq(x1:T∣x0)[logpθ(x0:T)/pθ(x0)q(x1:T∣x0)]; where pθ(x1:T∣x0)=pθ(x0)pθ(x0:T)=−logpθ(x0)+Eq(x1:T∣x0)[logpθ(x0:T)q(x1:T∣x0)+与q无关 logpθ(x0)]=Eq(x1:T∣x0)[logpθ(x0:T)q(x1:T∣x0)].
对公式 (15) 左右两边取期望
E
q
(
x
0
)
\mathbb{E}_{q(x_0)}
Eq(x0), 利用到重积分中的 Fubini 定理 可得:
L
V
L
B
=
E
q
(
x
0
)
(
E
q
(
x
1
:
T
∣
x
0
)
[
log
q
(
x
1
:
T
∣
x
0
)
p
θ
(
x
0
:
T
)
]
)
=
E
q
(
x
0
:
T
)
[
log
q
(
x
1
:
T
∣
x
0
)
p
θ
(
x
0
:
T
)
]
⏟
Fubini定理
≥
E
q
(
x
0
)
[
−
log
p
θ
(
x
0
)
]
\mathcal{L}_{V L B}=\underbrace{\mathbb{E}_{q\left(x_0\right)}\left(\mathbb{E}_{q\left(x_{1: T} \mid x_0\right)}\left[\log \frac{q\left(x_{1: T} \mid x_0\right)}{p_\theta\left(x_{0: T}\right)}\right]\right)=\mathbb{E}_{q\left(x_{0: T}\right)}\left[\log \frac{q\left(x_{1: T} \mid x_0\right)}{p_\theta\left(x_{0: T}\right)}\right]}_{\text {Fubini定理 }} \geq \mathbb{E}_{q\left(x_0\right)}\left[-\log p_\theta\left(x_0\right)\right]
LVLB=Fubini定理 Eq(x0)(Eq(x1:T∣x0)[logpθ(x0:T)q(x1:T∣x0)])=Eq(x0:T)[logpθ(x0:T)q(x1:T∣x0)]≥Eq(x0)[−logpθ(x0)]
因此最小化
L
V
L
B
\mathcal{L}_{V L B}
LVLB 就可以优化公式 (14) 中的目标函数. 之后对
L
V
L
B
\mathcal{L}_{V L B}
LVLB 做进一步的推导, 这部分的详细推导见上面的参考文章, 最终的结论是:
L
V
L
B
=
L
T
+
L
T
−
1
+
…
+
L
0
L
T
=
D
K
L
(
q
(
x
T
∣
x
0
)
∣
∣
p
θ
(
x
T
)
)
L
t
=
D
K
L
(
q
(
x
t
∣
x
t
+
1
,
x
0
)
∣
∣
p
θ
(
x
t
∣
x
t
+
1
)
)
;
1
≤
t
≤
T
−
1
L
0
=
−
log
p
θ
(
x
0
∣
x
1
)
\begin{align} \mathcal{L}_{V L B} &= L_T + L_{T - 1} + \ldots + L_0 \\ L_T &= D_{KL}\left(q(x_T|x_0)||p_{\theta}(x_T)\right) \\ L_t &= D_{KL}\left(q(x_t|x_{t + 1}, x_0)||p_{\theta}(x_t|x_{t+1})\right); \quad 1 \leq t \leq T - 1 \\ L_0 &= -\log{p_\theta\left(x_0|x_1\right)} \end{align}
LVLBLTLtL0=LT+LT−1+…+L0=DKL(q(xT∣x0)∣∣pθ(xT))=DKL(q(xt∣xt+1,x0)∣∣pθ(xt∣xt+1));1≤t≤T−1=−logpθ(x0∣x1)
最终是优化两个高斯分布
q
(
x
t
∣
x
t
−
1
,
x
0
)
=
N
(
x
t
−
1
;
μ
~
(
x
t
,
x
0
)
,
β
~
t
I
)
q(x_t|x_{t - 1}, x_0) = \mathcal{N}\left(x_{t-1} ; {\color{blue}{\tilde{\mu}}(x_t, x_0)}, {\color{red}{\tilde{\beta}_t} \mathbf{I}}\right)
q(xt∣xt−1,x0)=N(xt−1;μ~(xt,x0),β~tI) (详见公式 (7)) 与
p
θ
(
x
t
∣
x
t
+
1
)
=
N
(
x
t
−
1
;
μ
θ
(
x
t
,
t
)
,
Σ
θ
)
p_{\theta}(x_t|x_{t+1}) = \mathcal{N}\left(x_{t-1} ; \mu_\theta\left(x_t, t\right), \Sigma_\theta\right)
pθ(xt∣xt+1)=N(xt−1;μθ(xt,t),Σθ) (详见公式(6), 此为模型预估的分布)之间的 KL 散度. 由于多元高斯分布的 KL 散度存在闭式解, 详见: Multivariate_normal_distributions, 从而可以得到:
L
t
=
E
x
0
,
ϵ
[
1
2
∥
Σ
θ
(
x
t
,
t
)
∥
2
2
∥
μ
~
t
(
x
t
,
x
0
)
−
μ
θ
(
x
t
,
t
)
∥
2
]
=
E
x
0
,
ϵ
[
1
2
∥
Σ
θ
∥
2
2
∥
1
α
t
(
x
t
−
1
−
α
t
1
−
α
ˉ
t
ϵ
t
)
−
1
α
t
(
x
t
−
1
−
α
t
1
−
α
ˉ
t
ϵ
θ
(
x
t
,
t
)
)
∥
2
]
=
E
x
0
,
ϵ
[
(
1
−
α
t
)
2
2
α
t
(
1
−
α
ˉ
t
)
∥
Σ
θ
∥
2
2
∥
ϵ
t
−
ϵ
θ
(
x
t
,
t
)
∥
2
]
;
其中
ϵ
t
为高斯噪声
,
ϵ
θ
为模型学习的噪声
=
E
x
0
,
ϵ
[
(
1
−
α
t
)
2
2
α
t
(
1
−
α
ˉ
t
)
∥
Σ
θ
∥
2
2
∥
ϵ
t
−
ϵ
θ
(
α
ˉ
t
x
0
+
1
−
α
ˉ
t
ϵ
t
,
t
)
∥
2
]
\begin{align} L_t &= \mathbb{E}_{x_0, \epsilon} \Big[\frac{1}{2 \| \boldsymbol{\Sigma}_\theta(x_t, t) \|^2_2} \| \color{blue}{\tilde{\mu}_t(x_t, x_0)} - \color{green}{\mu_\theta(x_t, t)} \|^2 \Big] \\ &= \mathbb{E}_{x_0, \epsilon} \Big[\frac{1}{2 \|\boldsymbol{\Sigma}_\theta \|^2_2} \| \color{blue}{\frac{1}{\sqrt{\alpha_t}} \Big( x_t - \frac{1 - \alpha_t}{\sqrt{1 - \bar{\alpha}_t}} \epsilon_t \Big)} - \color{green}{\frac{1}{\sqrt{\alpha_t}} \Big( x_t - \frac{1 - \alpha_t}{\sqrt{1 - \bar{\alpha}_t}} \boldsymbol{\epsilon}_\theta(x_t, t) \Big)} \|^2 \Big] \\ &= \mathbb{E}_{x_0, \epsilon} \Big[\frac{ (1 - \alpha_t)^2 }{2 \alpha_t (1 - \bar{\alpha}_t) \| \boldsymbol{\Sigma}_\theta \|^2_2} \|\epsilon_t - \epsilon_\theta(x_t, t)\|^2 \Big]; \quad \text{其中} \epsilon_t \text{为高斯噪声}, \epsilon_{\theta} \text{为模型学习的噪声} \\ &= \mathbb{E}_{x_0, \epsilon} \Big[\frac{ (1 - \alpha_t)^2 }{2 \alpha_t (1 - \bar{\alpha}_t) \| \boldsymbol{\Sigma}_\theta \|^2_2} \|\epsilon_t - \epsilon_\theta(\sqrt{\bar{\alpha}_t}x_0 + \sqrt{1 - \bar{\alpha}_t}\epsilon_t, t)\|^2 \Big] \end{align}
Lt=Ex0,ϵ[2∥Σθ(xt,t)∥221∥μ~t(xt,x0)−μθ(xt,t)∥2]=Ex0,ϵ[2∥Σθ∥221∥αt1(xt−1−αˉt1−αtϵt)−αt1(xt−1−αˉt1−αtϵθ(xt,t))∥2]=Ex0,ϵ[2αt(1−αˉt)∥Σθ∥22(1−αt)2∥ϵt−ϵθ(xt,t)∥2];其中ϵt为高斯噪声,ϵθ为模型学习的噪声=Ex0,ϵ[2αt(1−αˉt)∥Σθ∥22(1−αt)2∥ϵt−ϵθ(αˉtx0+1−αˉtϵt,t)∥2]
DDPM 将 Loss 简化为如下形式:
L
t
simple
=
E
x
0
,
ϵ
t
[
∥
ϵ
t
−
ϵ
θ
(
α
ˉ
t
x
0
+
1
−
α
ˉ
t
ϵ
t
,
t
)
∥
2
]
\begin{align} L_t^{\text {simple }}=\mathbb{E}_{x_0, \epsilon_t}\left[\left\|\epsilon_t-\epsilon_\theta\left(\sqrt{\bar{\alpha}_t} x_0+\sqrt{1-\bar{\alpha}_t} \epsilon_t, t\right)\right\|^2\right] \end{align}
Ltsimple =Ex0,ϵt[ϵt−ϵθ(αˉtx0+1−αˉtϵt,t)2]
因此 Diffusion 模型的目标函数即是学习高斯噪声
ϵ
t
\epsilon_t
ϵt 和
ϵ
θ
\epsilon_{\theta}
ϵθ (来自模型输出) 之间的 MSE loss.
最终算法
最终 DDPM 的算法流程如下:
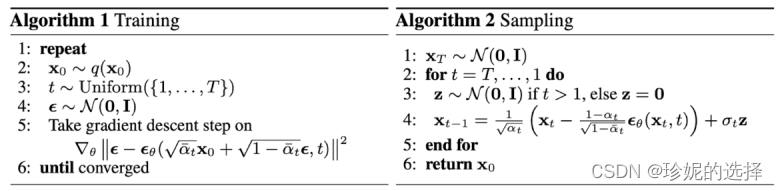
训练阶段重复如下步骤:
- 从数据集中采样 x 0 x_0 x0
- 随机选取 time step t t t
- 生成高斯噪声 ϵ t ∈ N ( 0 , I ) \epsilon_t\in\mathcal{N}(0, \mathbf{I}) ϵt∈N(0,I)
- 调用模型预估 ϵ θ ( α ˉ t x 0 + 1 − α ˉ t ϵ t , t ) \epsilon_\theta\left(\sqrt{\bar{\alpha}_t} x_0+\sqrt{1-\bar{\alpha}_t} \epsilon_t, t\right) ϵθ(αˉtx0+1−αˉtϵt,t)
- 计算噪声之间的 MSE Loss: ∥ ϵ t − ϵ θ ( α ˉ t x 0 + 1 − α ˉ t ϵ t , t ) ∥ 2 \left|\epsilon_t-\epsilon_\theta\left(\sqrt{\bar{\alpha}_t} x_0+\sqrt{1-\bar{\alpha}_t} \epsilon_t, t\right)\right|^2 ϵt−ϵθ(αˉtx0+1−αˉtϵt,t)2, 并利用反向传播算法训练模型.
逆向阶段采用如下步骤进行采样:
- 从高斯分布采样 x T x_T xT
- 按照 T , … , 1 T, \ldots, 1 T,…,1 的顺序进行迭代: - 如果 t = 1 t = 1 t=1, 令 z = 0 \mathbf{z} = {0} z=0; 如果 t > 1 t > 1 t>1, 从高斯分布中采样 z ∼ N ( 0 , I ) \mathbf{z}\sim\mathcal{N}(0, \mathbf{I}) z∼N(0,I)- 利用公式 (12) 学习出均值 μ θ ( x t , t ) = 1 α t ( x t − 1 − α t 1 − α ˉ t ϵ θ ( x t , t ) ) \mu_\theta(x_t, t) = \color{cyan}{\frac{1}{\sqrt{\alpha_t}} \Big( x_t - \frac{1 - \alpha_t}{\sqrt{1 - \bar{\alpha}_t}} \epsilon_\theta(x_t, t) \Big)} μθ(xt,t)=αt1(xt−1−αˉt1−αtϵθ(xt,t)), 并利用公式 (8) 计算均方差 σ t = β ~ t = 1 − α ˉ t − 1 1 − α ˉ t ⋅ β t \sigma_t = \sqrt{\tilde{\beta}t} = \sqrt{\frac{1 - \bar{\alpha}{t-1}}{1 - \bar{\alpha}t} \cdot \beta_t} σt=β~t=1−αˉt1−αˉt−1⋅βt- 通过重参数技巧采样 x t − 1 = μ θ ( x t , t ) + σ t z x{t - 1} = \mu_\theta(x_t, t) + \sigma_t\mathbf{z} xt−1=μθ(xt,t)+σtz
- 经过以上过程的迭代, 最终恢复 x 0 x_0 x0.
源码分析
DDPM 文章以及代码的相关信息如下:
- Denoising Diffusion Probabilistic Models 论文, - 其 TF 源码位于: https://github.com/hojonathanho/diffusion, 源码介绍以该版本为主- PyTorch 的开源实现: https://github.com/lucidrains/denoising-diffusion-pytorch, 核心逻辑和上面 Tensorflow 版本是一致的, Stable Diffusion 参考的是 pytorch 版本的代码.
本文以分析 Tensorflow 源码为主, Pytorch 版本的代码和 Tensorflow 版本的实现逻辑大体不差的, 变量名字啥的都类似, 阅读起来不会有啥门槛. Tensorlow 源码对 Diffusion 模型的实现位于 diffusion_utils_2.py, 模型本身的分析以该文件为主.
训练阶段
以 CIFAR 数据集为例.
在 run_cifar.py 中进行前向传播计算 Loss:
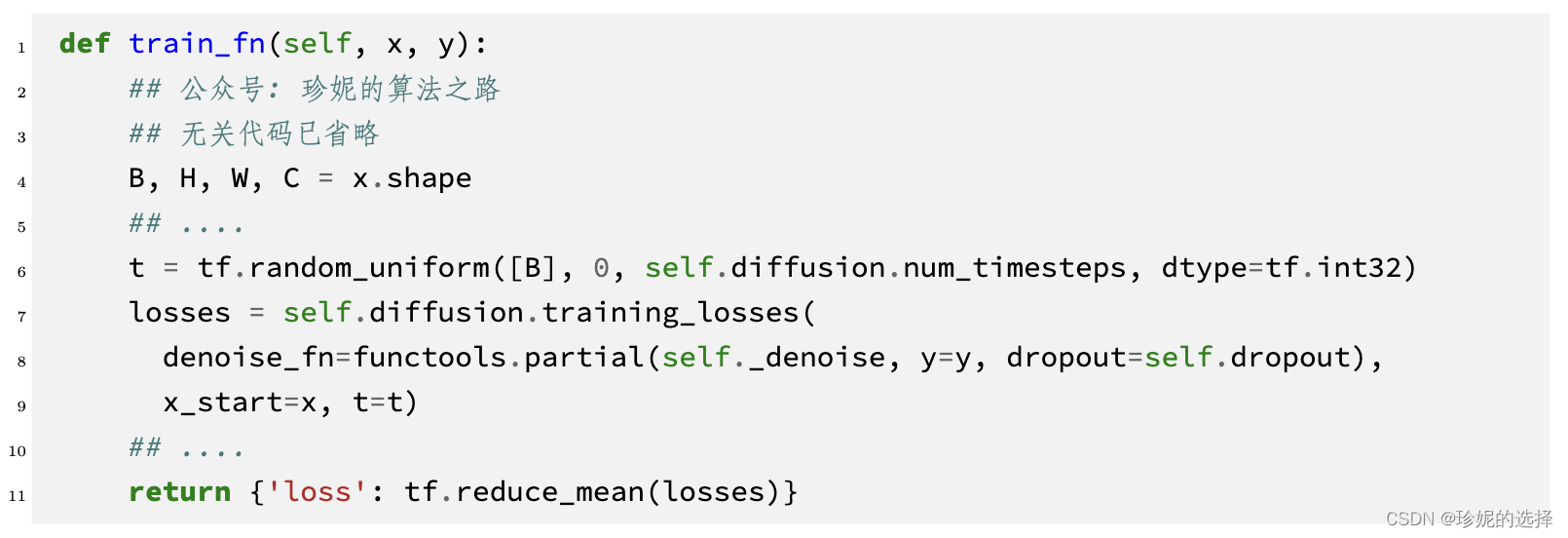
- 第 6 行随机选出 t ∼ Uniform ( { 1 , … , T } ) t\sim\text{Uniform}({1, \ldots, T}) t∼Uniform({1,…,T})
- 第 7 行
training_losses定义在 GaussianDiffusion2 中, 计算噪声间的 MSE Loss.
进入 GaussianDiffusion2 中, 看到初始化函数中定义了诸多变量, 我在注释中使用公式的方式进行了说明:

下面进入到
training_losses
函数中:
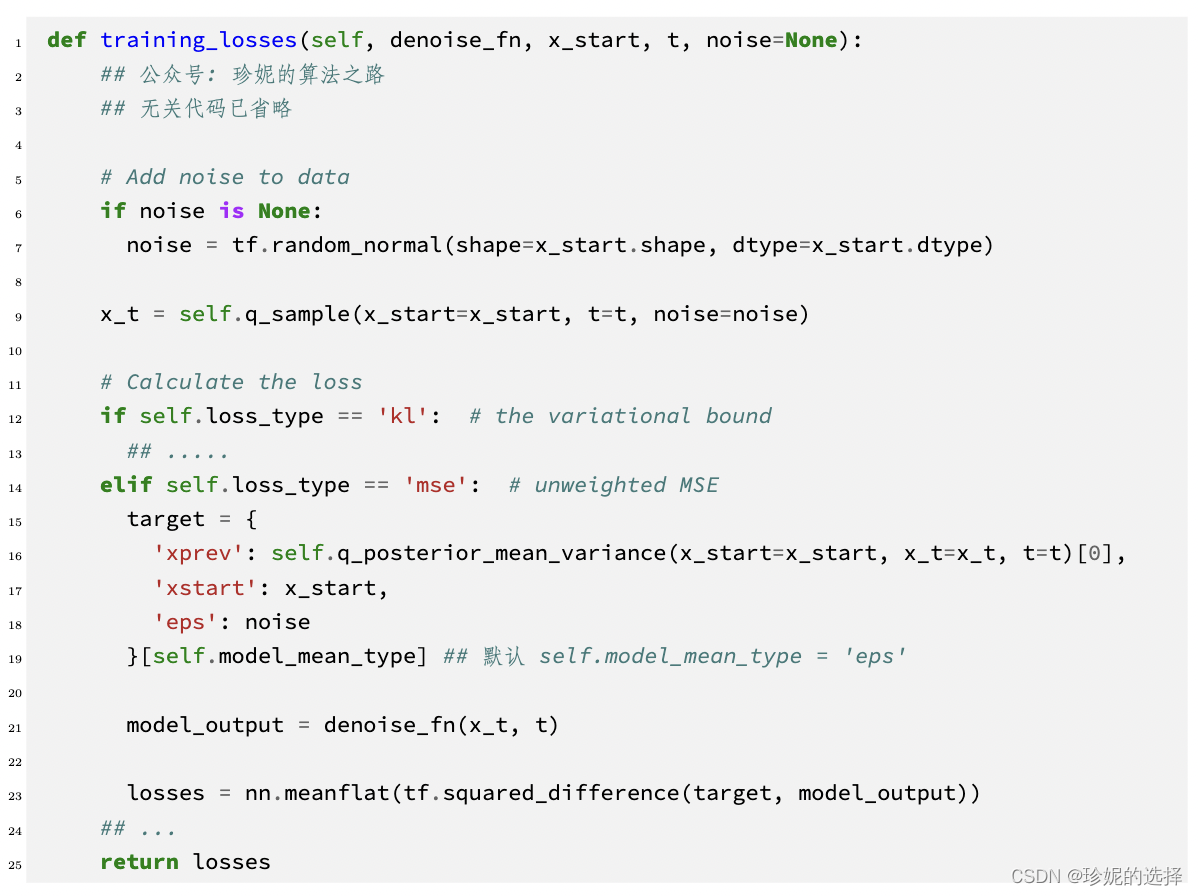
- 第 19 行:
self.model_mean_type默认是eps, 模型学习的是噪声, 因此target是第 6 行定义的noise, 即 ϵ t \epsilon_t ϵt - 第 9 行: 调用
self.q_sample计算 x t x_t xt, 即公式 (3) x t = α ˉ t x 0 + 1 − α ˉ t ϵ t x_t =\sqrt{\bar{\alpha}_t} x_0+\sqrt{1-\bar{\alpha}_t} \epsilon_t xt=αˉtx0+1−αˉtϵt - 第 21 行:
denoise_fn是定义在 unet.py 中的UNet模型, 只需知道它的输入和输出大小相同; 结合第 9 行得到的 x t x_t xt, 得到模型预估的噪声: ϵ θ ( α ˉ t x 0 + 1 − α ˉ t ϵ t , t ) \epsilon_\theta\left(\sqrt{\bar{\alpha}_t} x_0+\sqrt{1-\bar{\alpha}_t} \epsilon_t, t\right) ϵθ(αˉtx0+1−αˉtϵt,t) - 第 23 行: 计算两个噪声之间的 MSE: ∥ ϵ t − ϵ θ ( α ˉ t x 0 + 1 − α ˉ t ϵ t , t ) ∥ 2 \left|\epsilon_t-\epsilon_\theta\left(\sqrt{\bar{\alpha}_t} x_0+\sqrt{1-\bar{\alpha}_t} \epsilon_t, t\right)\right|^2 ϵt−ϵθ(αˉtx0+1−αˉtϵt,t)2, 并利用反向传播算法训练模型
上面第 9 行定义的
self.q_sample
详情如下:
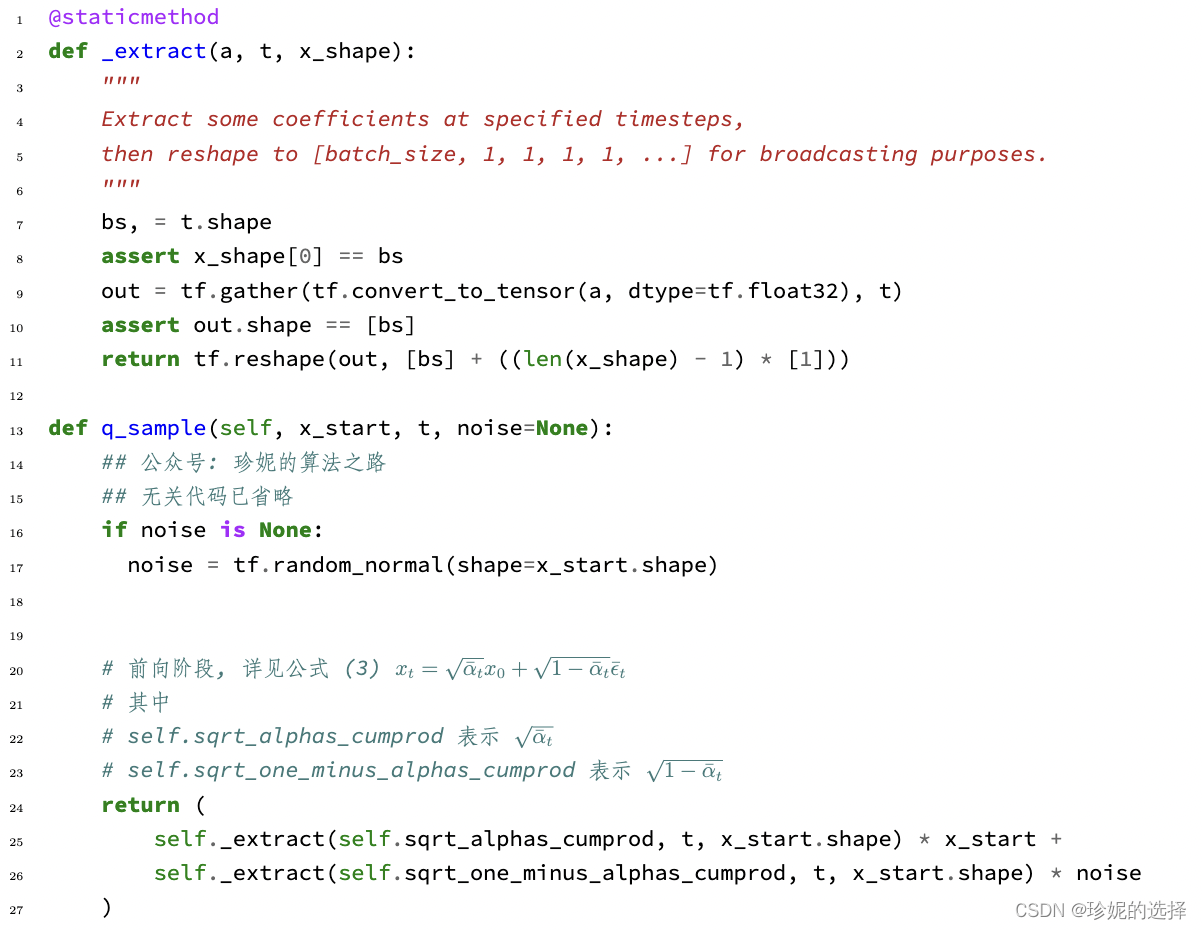
- 第 13 行的
q_sample已经介绍过, 不多说. - 第 2 行的
_extract在代码中经常被使用到, 看到它只需知道它是用来提取系数的即可. 引入输入是一个 Batch, 里面的每个样本都会随机采样一个 time step t t t, 因此需要使用tf.gather来将 α t ˉ \bar{\alpha_t} αtˉ 之类选出来, 然后将系数 reshape 为[B, 1, 1, ....]的形式, 目的是为了利用 broadcasting 机制和 x t x_t xt 这个 Tensor 相乘.
前向的训练阶段代码实现非常简单, 下面看逆向阶段
逆向阶段
逆向阶段代码定义在 GaussianDiffusion2 中:

- 第 5 行生成高斯噪声 x T x_T xT, 然后对其不断去噪直至恢复原始图像
- 第 11 行的
self.p_sample就是公式 (6) p θ ( x t − 1 ∣ x t ) = N ( x t − 1 ; μ θ ( x t , t ) , Σ θ ( x t , t ) ) p_\theta\left(x_{t-1} \mid x_t\right) =\mathcal{N}\left(x_{t-1} ; \mu_\theta\left(x_t, t\right), \Sigma_\theta\left(x_t, t\right)\right) pθ(xt−1∣xt)=N(xt−1;μθ(xt,t),Σθ(xt,t)) 的过程, 使用模型来预估 μ θ ( x t , t ) \mu_\theta\left(x_t, t\right) μθ(xt,t) 以及 Σ θ ( x t , t ) \Sigma_\theta\left(x_t, t\right) Σθ(xt,t) - 第 12 行的
denoise_fn在前面说过, 是定义在 unet.py 中的UNet模型;img_表示 x t x_t xt. - 第 13 行的
noise_fn则默认是tf.random_normal, 用于生成高斯噪声.
进入
p_sample
函数:
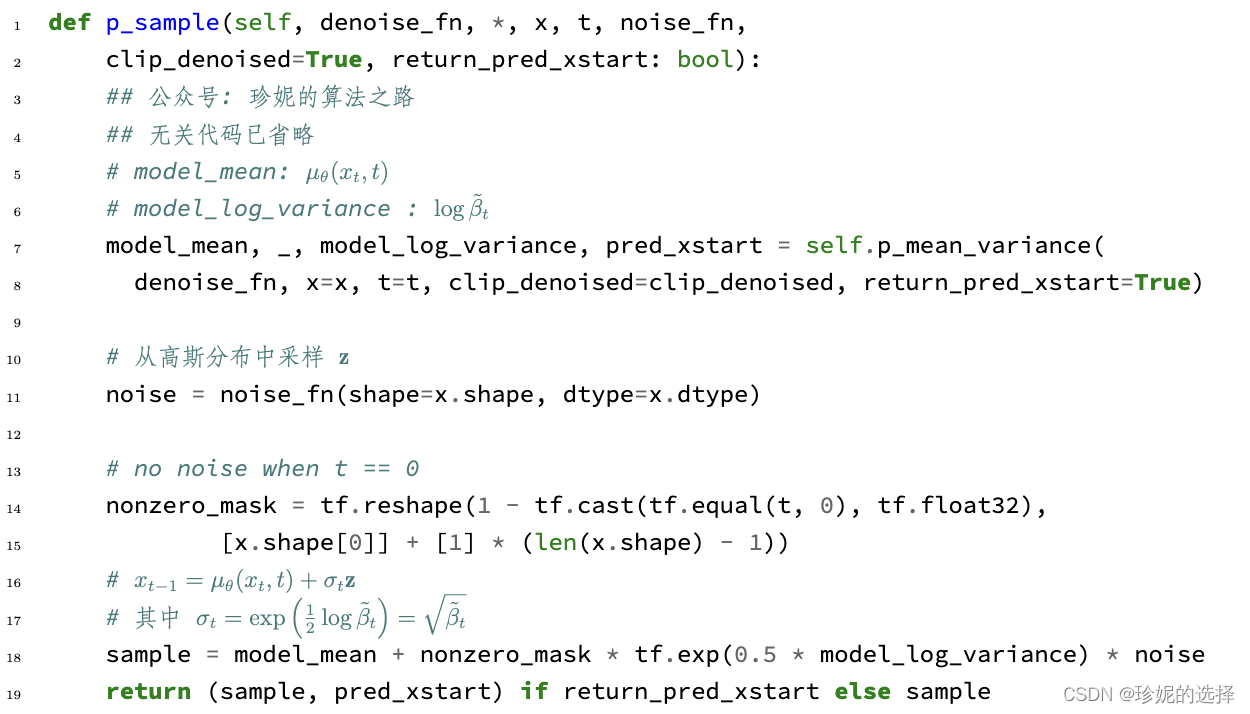
- 第 7 行调用
self.p_mean_variance生成 μ θ ( x t , t ) \mu_\theta\left(x_t, t\right) μθ(xt,t) 以及 log ( Σ θ ( x t , t ) ) \log\left(\Sigma_\theta\left(x_t, t\right)\right) log(Σθ(xt,t)), 其中 Σ θ ( x t , t ) \Sigma_\theta\left(x_t, t\right) Σθ(xt,t) 通过计算 β ~ t \tilde{\beta}_t β~t 得到. - 第 11 行从高斯分布中采样 z \mathbf{z} z
- 第 18 行通过重参数技巧采样 x t − 1 = μ θ ( x t , t ) + σ t z x_{t - 1} = \mu_\theta(x_t, t) + \sigma_t\mathbf{z} xt−1=μθ(xt,t)+σtz, 其中 σ t = β ~ t \sigma_t = \sqrt{\tilde{\beta}_t} σt=β~t
进入
self.p_mean_variance
函数:
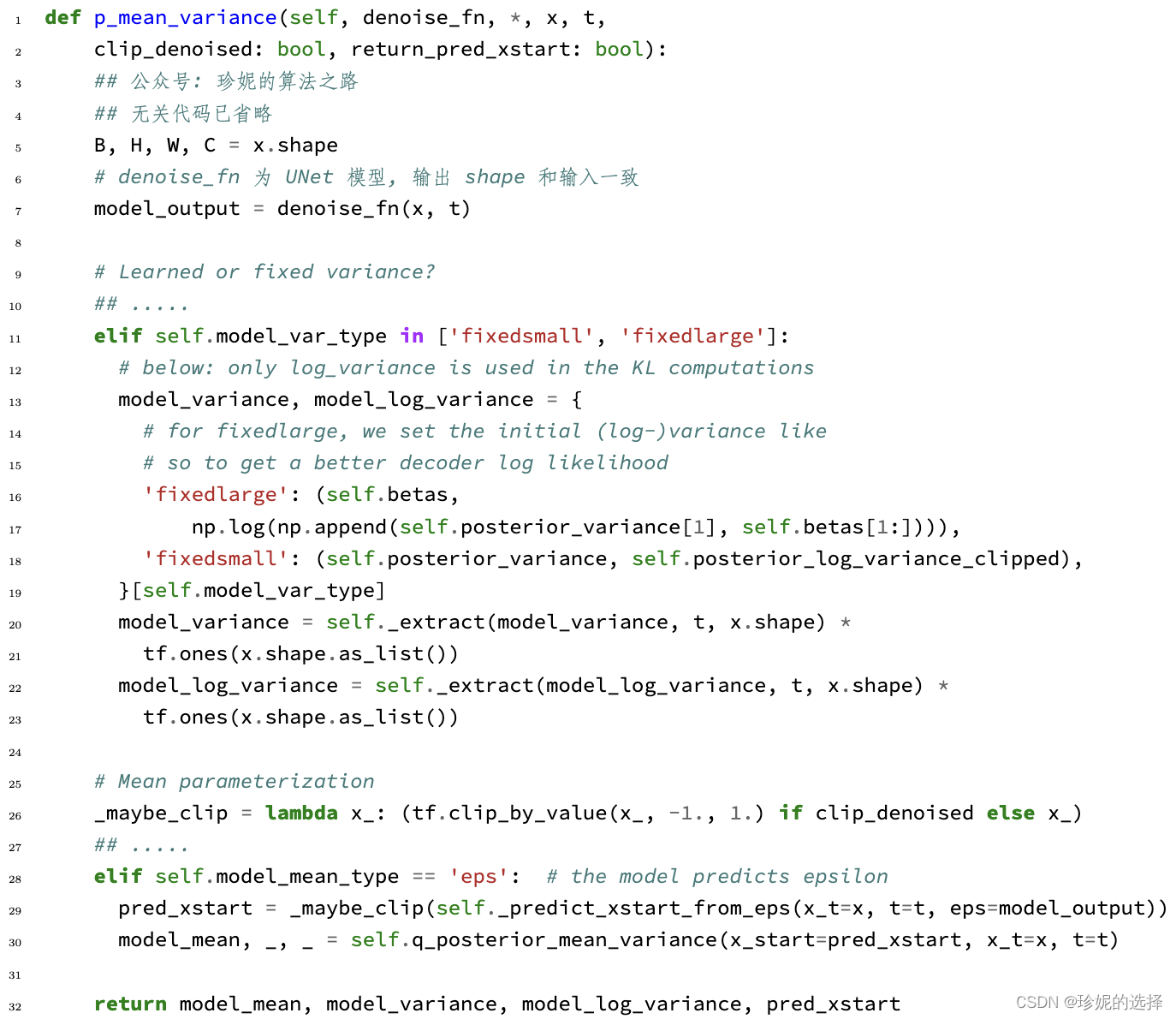
- 第 6 行调用模型
denoise_fn, 通过输入 x t x_t xt, 输出得到噪声 ϵ t \epsilon_t ϵt - 第 19 行
self.model_var_type默认为fixedlarge, 但我当时看fixedsmall比较爽, 因此model_variance和model_log_variance分别为 β ~ t = 1 − α ˉ t − 1 1 − α ˉ t ⋅ β t \tilde{\beta}t = \frac{1 - \bar{\alpha}{t-1}}{1 - \bar{\alpha}_t} \cdot \beta_t βt=1−αˉt1−αˉt−1⋅βt (见公式 8), 以及 log β ~ t \log\tilde{\beta}_t logβt - 第 29 行调用
self._predict_xstart_from_eps函数, 利用公式 (10) 得到 x 0 = 1 α ˉ t ( x t − 1 − α ˉ t ϵ t ) x_0 = \frac{1}{\sqrt{\bar{\alpha}_t}}(x_t - \sqrt{1 - \bar{\alpha}_t}\epsilon_t) x0=αˉt1(xt−1−αˉtϵt) - 第 30 行调用
self.q_posterior_mean_variance通过公式 (9) 得到 μ θ ( x t , x 0 ) = α t ( 1 − α ˉ t − 1 ) 1 − α ˉ t x t + α ˉ t − 1 β t 1 − α ˉ t x 0 \mu_\theta(x_t, x_0) = \frac{\sqrt{\alpha_t}(1 - \bar{\alpha}_{t-1})}{1 - \bar{\alpha}t} x_t + \frac{\sqrt{\bar{\alpha}{t-1}}\beta_t}{1 - \bar{\alpha}_t} x_0 μθ(xt,x0)=1−αˉtαt(1−αˉt−1)xt+1−αˉtαˉt−1βtx0
self._predict_xstart_from_eps
函数相亲如下:
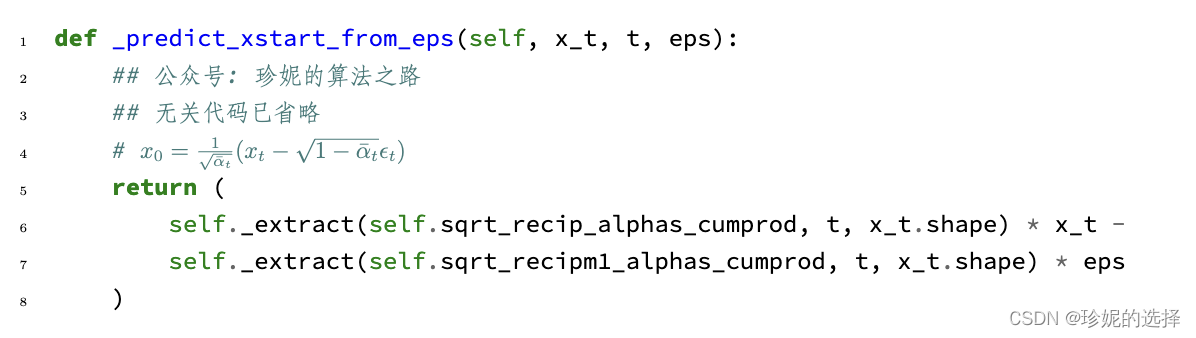
- 该函数计算 x 0 = 1 α ˉ t ( x t − 1 − α ˉ t ϵ t ) x_0 = \frac{1}{\sqrt{\bar{\alpha}_t}}(x_t - \sqrt{1 - \bar{\alpha}_t}\epsilon_t) x0=αˉt1(xt−1−αˉtϵt)
self.q_posterior_mean_variance
函数详情如下:
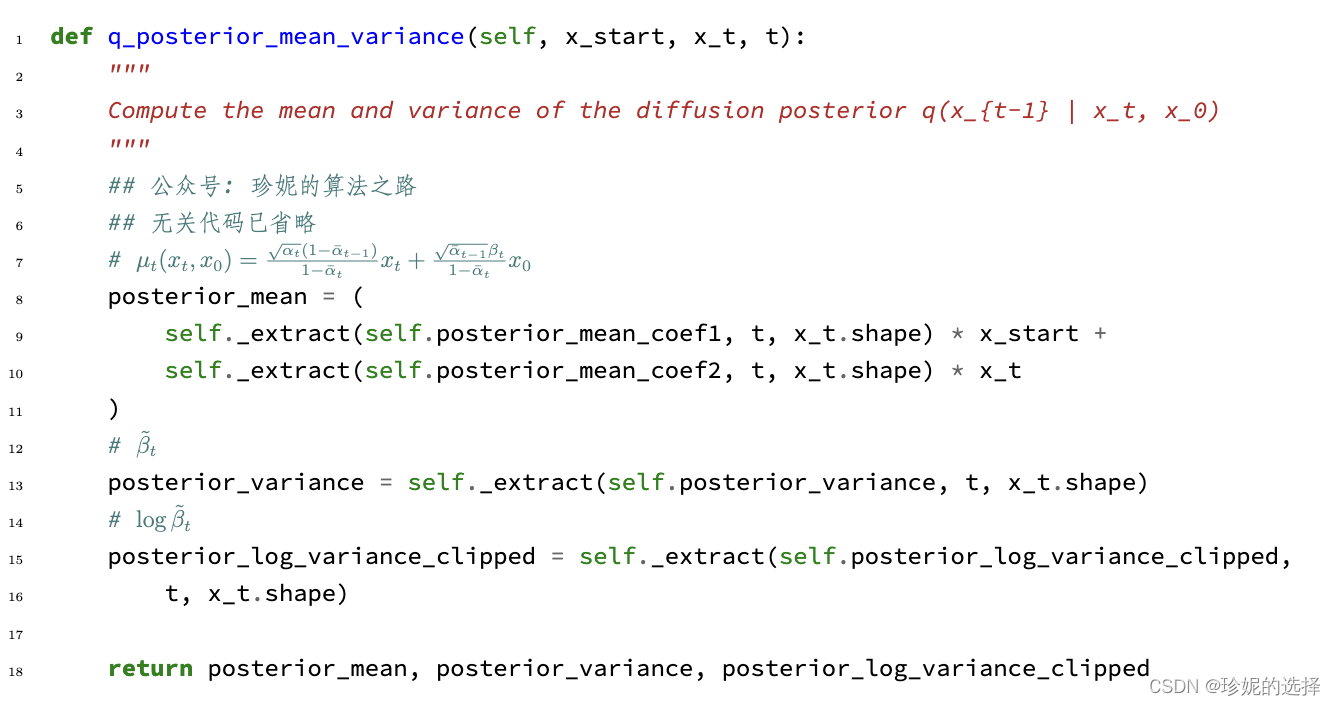
- 相关说明见注释, 另外发现对于 μ θ ( x t , x 0 ) \mu_\theta(x_t, x_0) μθ(xt,x0) 的计算使用的是公式 (9) μ θ ( x t , x 0 ) = α t ( 1 − α ˉ t − 1 ) 1 − α ˉ t x t + α ˉ t − 1 β t 1 − α ˉ t x 0 \mu_\theta(x_t, x_0) = \frac{\sqrt{\alpha_t}(1 - \bar{\alpha}_{t-1})}{1 - \bar{\alpha}t} x_t + \frac{\sqrt{\bar{\alpha}{t-1}}\beta_t}{1 - \bar{\alpha}_t} x_0 μθ(xt,x0)=1−αˉtαt(1−αˉt−1)xt+1−αˉtαˉt−1βtx0 而不是进一步推导后的公式 (11) μ θ ( x t , x 0 ) = 1 α t ( x t − 1 − α t 1 − α ˉ t ϵ t ) \mu_\theta(x_t, x_0) = \frac{1}{\sqrt{\alpha_t}} \Big( x_t - \frac{1 - \alpha_t}{\sqrt{1 - \bar{\alpha}_t}} \epsilon_t \Big) μθ(xt,x0)=αt1(xt−1−αˉt1−αtϵt).
总结
写文章真的挺累的, 好处是, 我发现写之前我以为理解了, 但写的过程中又发现有些地方理解的不对. 写完后才终于把逻辑理顺.
版权归原作者 珍妮的选择 所有, 如有侵权,请联系我们删除。