
前言
训练和开发环境是win10,显卡RTX3080;cuda10.2,cudnn7.1;OpenCV4.5;yolov5用的是5s的模型,2020年8月13日的发布v3.0这个版本; ncnn版本是20210525;C++ IDE vs2019,Anaconda 3.5。
一、环境安装
1.anaconda环境
- 创建环境
conda create --name yolov5 python=3.7
activate yolov5
- 退出环境
conda deactivate
查看已安装的环境
conda info --env
- 删除环境
conda env remove -n yolov5
2.安装依赖
git clone https://github.com/ultralytics/yolov5.git
cd yolov5
pip install -r requirements.txt
或者
git clone https://github.com/ultralytics/yolov5.git
cd yolov5
conda install pytorch torchvision cudatoolkit=10.2 -c pytorch
pip install cython matplotlib tqdm opencv-python tensorboard scipy pillow onnx pyyaml pandas seaborn
win下尽量不要用cuda11,试了几次都是要么找不到GPU,要么跑到一半崩了。
二、数据处理
1.数据标注用labelme,身份证的数据我从网上找了一些公开的模板数据,然后用对抗生成了一批数据进行标注,300张样本左右,labelme标注出来的数据格式是xml。
2.在yolo/data 目录下创建一个存放数据集的目录,目录下再分两个目录,JPEGImages存放原始图像,Annotations存在放标签文件。
3.数据标注用labelme标注成.xml,但yolo要的标签格式是.txt,所以要把数据转换过来。
- 数据生成训练集与验证集,在data/xxxx目录下会 train.txt 和val.txt,输出所有标注的类名,并在JPEGImages下生成与文件名对应的.txt文件。 执行命令:
python generate_txt.py --img_path data/XXXXX/JPEGImages --xml_path data/XXXXX/Annotations --out_path data/XXXXX
- 输出标注的类名样例:如[‘ida’, ‘idb’]。
- 生成的.txt文件 类名 归一化后的目标坐标点
0 0.518 0.7724887556221889 0.296 0.15367316341829085
3 0.4475 0.7694902548725637 0.089 0.08620689655172414
- 数据处理代码
- generate_txt.py
import os
import glob
import argparse
import random
import xml.etree.ElementTree as ET
from PIL import Image
from tqdm import tqdm
defget_all_classes(xml_path):
xml_fns = glob.glob(os.path.join(xml_path,'*.xml'))
class_names =[]for xml_fn in xml_fns:
tree = ET.parse(xml_fn)
root = tree.getroot()for obj in root.iter('object'):
cls = obj.find('name').text
class_names.append(cls)returnsorted(list(set(class_names)))defconvert_annotation(img_path, xml_path, class_names, out_path):
output =[]
im_fns = glob.glob(os.path.join(img_path,'*.jpg'))for im_fn in tqdm(im_fns):if os.path.getsize(im_fn)==0:continue
xml_fn = os.path.join(xml_path, os.path.splitext(os.path.basename(im_fn))[0]+'.xml')ifnot os.path.exists(xml_fn):continue
img = Image.open(im_fn)
height, width = img.height, img.width
tree = ET.parse(xml_fn)
root = tree.getroot()
anno =[]
xml_height =int(root.find('size').find('height').text)
xml_width =int(root.find('size').find('width').text)if height != xml_height or width != xml_width:print((height, width),(xml_height, xml_width), im_fn)continuefor obj in root.iter('object'):
cls = obj.find('name').text
cls_id = class_names.index(cls)
xmlbox = obj.find('bndbox')
xmin =int(xmlbox.find('xmin').text)
ymin =int(xmlbox.find('ymin').text)
xmax =int(xmlbox.find('xmax').text)
ymax =int(xmlbox.find('ymax').text)
cx =(xmax + xmin)/2.0/ width
cy =(ymax + ymin)/2.0/ height
bw =(xmax - xmin)*1.0/ width
bh =(ymax - ymin)*1.0/ height
anno.append('{} {} {} {} {}'.format(cls_id, cx, cy, bw, bh))iflen(anno)>0:
output.append(im_fn)withopen(im_fn.replace('.jpg','.txt'),'w')as f:
f.write('\n'.join(anno))
random.shuffle(output)
train_num =int(len(output)*0.9)withopen(os.path.join(out_path,'train.txt'),'w')as f:
f.write('\n'.join(output[:train_num]))withopen(os.path.join(out_path,'val.txt'),'w')as f:
f.write('\n'.join(output[train_num:]))defparse_args():
parser = argparse.ArgumentParser('generate annotation')
parser.add_argument('--img_path',type=str,help='input image directory')
parser.add_argument('--xml_path',type=str,help='input xml directory')
parser.add_argument('--out_path',type=str,help='output directory')
args = parser.parse_args()return args
if __name__ =='__main__':
args = parse_args()
class_names = get_all_classes(args.xml_path)print(class_names)
convert_annotation(args.img_path, args.xml_path, class_names, args.out_path)
三、模型训练
1.model/yolov5s.yaml,更改nc数目。
# parameters
nc:2# 检测总类别
depth_multiple:0.33# model depth multiple 网络的深度系数
width_multiple:0.50# layer channel multiple 卷积核的系数# anchors 候选框,可以改成自己目标的尺寸,也可以增加候选框
anchors:-[10,13,16,30,33,23]# P3/8-[30,61,62,45,59,119]# P4/16-[116,90,156,198,373,326]# P5/32# YOLOv5 backbone
backbone:#特征提取模块# [from, number, module, args]# from - 输入是什么,-1:上一层的输出结果;# number - 该层的重复的次数,要乘以系数,小于1则等于1 源码( n = max(round(n * gd), 1) if n > 1 else n)# module - 层的名字# args - 卷积核的个数[[-1,1, Focus,[64,3]],# 0-P1/2 # 64要乘以卷积核的个数 64*0.5 = 32个特征图[-1,1, Conv,[128,3,2]],# 1-P2/4[-1,3, BottleneckCSP,[128]],[-1,1, Conv,[256,3,2]],# 3-P3/8[-1,9, BottleneckCSP,[256]],[-1,1, Conv,[512,3,2]],# 5-P4/16[-1,9, BottleneckCSP,[512]],[-1,1, Conv,[1024,3,2]],# 7-P5/32[-1,1, SPP,[1024,[5,9,13]]],[-1,3, BottleneckCSP,[1024,False]],# 9]# YOLOv5 head
head:[[-1,1, Conv,[512,1,1]],[-1,1, nn.Upsample,[None,2,'nearest']],[[-1,6],1, Concat,[1]],# cat backbone P4[-1,3, BottleneckCSP,[512,False]],# 13[-1,1, Conv,[256,1,1]],[-1,1, nn.Upsample,[None,2,'nearest']],[[-1,4],1, Concat,[1]],# cat backbone P3[-1,3, BottleneckCSP,[256,False]],# 17 (P3/8-small)[-1,1, Conv,[256,3,2]],[[-1,14],1, Concat,[1]],# cat head P4[-1,3, BottleneckCSP,[512,False]],# 20 (P4/16-medium)[-1,1, Conv,[512,3,2]],[[-1,10],1, Concat,[1]],# cat head P5[-1,3, BottleneckCSP,[1024,False]],# 23 (P5/32-large)[[17,20,23],1, Detect,[nc, anchors]],# Detect(P3, P4, P5) [17,20,23] #17层、20层、23层;]
2.在data目录下添加一个xxx.yaml训练数据配置文件。
# download command/URL (optional)
download: bash data/scripts/get_voc.sh
# 训练集txt与验证集txt路径
train: data/xxx/train.txt
val: data/xxx/val.txt
# 总类别数
nc: 2
# 类名
names: ['ida', 'idb']
3.训练参数
parser = argparse.ArgumentParser()
parser.add_argument('--weights',type=str, default='yolov5s.pt',help='initial weights path')# 权重文件,是否在使用预训练权重文件
parser.add_argument('--cfg',type=str, default='',help='model.yaml path')# 网络配置文件
parser.add_argument('--data',type=str, default='data/coco128.yaml',help='data.yaml path')# 训练数据集目录
parser.add_argument('--hyp',type=str, default='data/hyp.scratch.yaml',help='hyperparameters path')#超参数配置文件
parser.add_argument('--epochs',type=int, default=300)# 训练迭代次数
parser.add_argument('--batch-size',type=int, default=32,help='total batch size for all GPUs')# batch-size大小
parser.add_argument('--img-size', nargs='+',type=int, default=[640,640],help='[train, test] image sizes')# 训练图像大小
parser.add_argument('--rect', action='store_true',help='rectangular training')#矩形训练
parser.add_argument('--resume', nargs='?', const=True, default=False,help='resume most recent training')# 是否接着上一次的日志权重继续训练
parser.add_argument('--nosave', action='store_true',help='only save final checkpoint')# 不保存
parser.add_argument('--notest', action='store_true',help='only test final epoch')# 不测试
parser.add_argument('--noautoanchor', action='store_true',help='disable autoanchor check')
parser.add_argument('--evolve', action='store_true',help='evolve hyperparameters')#超参数范围
parser.add_argument('--bucket',type=str, default='',help='gsutil bucket')
parser.add_argument('--cache-images', action='store_true',help='cache images for faster training')#是否缓存图像
parser.add_argument('--image-weights', action='store_true',help='use weighted image selection for training')
parser.add_argument('--device', default='',help='cuda device, i.e. 0 or 0,1,2,3 or cpu')# 用GPU或者CPU进行训练
parser.add_argument('--multi-scale', action='store_true',help='vary img-size +/- 50%%')#是否多尺度训练
parser.add_argument('--single-cls', action='store_true',help='train as single-class dataset')# 是否一个类别
parser.add_argument('--adam', action='store_true',help='use torch.optim.Adam() optimizer')# 优化器先择
parser.add_argument('--sync-bn', action='store_true',help='use SyncBatchNorm, only available in DDP mode')
parser.add_argument('--local_rank',type=int, default=-1,help='DDP parameter, do not modify')
parser.add_argument('--log-imgs',type=int, default=16,help='number of images for W&B logging, max 100')
parser.add_argument('--workers',type=int, default=8,help='maximum number of dataloader workers')#win不能改,win上改不改都容易崩
parser.add_argument('--project', default='runs/train',help='save to project/name')
parser.add_argument('--name', default='exp',help='save to project/name')
parser.add_argument('--exist-ok', action='store_true',help='existing project/name ok, do not increment')
opt = parser.parse_args()
4.训练命令
- 单卡:
python train.py --cfg models/yolov5s.yaml --data data/ODID.yaml --hyp data/hyps/hyp.scratch.yaml --epochs 100--multi-scale --device 0
- 多卡:
python train.py --cfg models/yolov5s.yaml --data data/ODID.yaml --hyp data/hyps/hyp.scratch.yaml --epochs 100--multi-scale --device 0,1
5.测试模型
python test.py --weights runs/train/exp/weights/best.pt --data data/ODID.yaml --device 0--verbose
--weights: 训练得到的模型
--data:数据配置文件.txt
--device:选择gpu进行评测
--verbose:是否打印每一类的评测指标
OpenCV DNN C++ 推理
1.由于OpenCV DNN中的slice层不支持step为2,所以在转换模型时需要修改代码,修改的地方在models/common.py中Focus类
- 修改前:
classFocus(nn.Module):# Focus wh information into c-spacedef__init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True):# ch_in, ch_out, kernel, stride, padding, groupssuper(Focus, self).__init__()
self.conv = Conv(c1 *4, c2, k, s, p, g, act)defforward(self, x):# x(b,c,w,h) -> y(b,4c,w/2,h/2)return self.conv(torch.cat([x[...,::2,::2], x[...,1::2,::2], x[...,::2,1::2], x[...,1::2,1::2]],1))
- 修改后
classFocus(nn.Module):# Focus wh information into c-spacedef__init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True):# ch_in, ch_out, kernel, stride, padding, groupssuper(Focus, self).__init__()
self.conv = Conv(c1 *4, c2, k, s, p, g, act)defforward(self, x):# x(b,c,w,h) -> y(b,4c,w/2,h/2)#return self.conv(torch.cat([x[..., ::2, ::2], x[..., 1::2, ::2], x[..., ::2, 1::2], x[..., 1::2, 1::2]], 1))return self.conv(x)
2.转换模型
python models/export.py --weights runs/exp/weights/best.pt
# --weights: 训练得到的模型
运行后,onnx模型保存为了runs/exp/weights/best.onnx,这个模型就可以用OpenCV DNN进行推理。
3.DNN C++推理
#include<iostream>#include<string>#include<vector>#include<fstream>#include<sstream>#include<opencv2/opencv.hpp>#include<opencv2/dnn.hpp>voidimshow(std::string name,const cv::Mat& cv_src){
cv::namedWindow(name,0);int max_rows =800;int max_cols =800;if(cv_src.rows >= cv_src.cols && cv_src.rows > max_rows){
cv::resizeWindow(name, cv::Size(cv_src.cols * max_rows / cv_src.rows, max_rows));}elseif(cv_src.cols >= cv_src.rows && cv_src.cols > max_cols){
cv::resizeWindow(name, cv::Size(max_cols, cv_src.rows * max_cols / cv_src.cols));}
cv::imshow(name, cv_src);}inlinefloatsigmoid(float x){return1.f/(1.f+exp(-x));}voidsliceAndConcat(cv::Mat& img, cv::Mat* input){constfloat* srcData = img.ptr<float>();float* dstData = input->ptr<float>();using Vec12f = cv::Vec<float,12>;for(int i =0; i < input->size[2]; i++){for(int j =0; j < input->size[3]; j++){for(int k =0; k <3;++k){
dstData[k * input->size[2]* input->size[3]+ i * input->size[3]+ j]=
srcData[k * img.size[2]* img.size[3]+2* i * img.size[3]+2* j];}for(int k =0; k <3;++k){
dstData[(3+ k)* input->size[2]* input->size[3]+ i * input->size[3]+ j]=
srcData[k * img.size[2]* img.size[3]+(2* i +1)* img.size[3]+2* j];}for(int k =0; k <3;++k){
dstData[(6+ k)* input->size[2]* input->size[3]+ i * input->size[3]+ j]=
srcData[k * img.size[2]* img.size[3]+2* i * img.size[3]+2* j +1];}for(int k =0; k <3;++k){
dstData[(9+ k)* input->size[2]* input->size[3]+ i * input->size[3]+ j]=
srcData[k * img.size[2]* img.size[3]+(2* i +1)* img.size[3]+2* j +1];}}}}
std::vector<cv::String>getOutputNames(const cv::dnn::Net& net){static std::vector<cv::String> names;if(names.empty()){
std::vector<int> outLayers = net.getUnconnectedOutLayers();
std::vector<cv::String> layersNames = net.getLayerNames();
names.resize(outLayers.size());for(size_t i =0; i < outLayers.size(); i++){
names[i]= layersNames[outLayers[i]-1];}}return names;}voiddrawPred(int classId,float conf,int left,int top,int right,int bottom, cv::Mat& frame,const std::vector<std::string>&classes){
cv::rectangle(frame, cv::Point(left, top), cv::Point(right, bottom), cv::Scalar(0,255,0),3);
std::string label = cv::format("%.2f", conf);if(!classes.empty()){CV_Assert(classId <(int)classes.size());
label = classes[classId]+": "+ label;}int baseLine;
cv::Size labelSize = cv::getTextSize(label, cv::FONT_HERSHEY_SIMPLEX,0.5,1,&baseLine);
top = std::max(top, labelSize.height);
cv::rectangle(frame, cv::Point(left, top -round(1.5* labelSize.height)), cv::Point(left +round(1.5* labelSize.width), top + baseLine), cv::Scalar(0,255,0), cv::FILLED);
cv::putText(frame, label, cv::Point(left, top), cv::FONT_HERSHEY_SIMPLEX,0.75, cv::Scalar(),2);}voidpostprocess(cv::Mat& cv_src, std::vector<cv::Mat>& outs,const std::vector<std::string>& classes,int net_size){float confThreshold =0.4f;float nmsThreshold =0.5f;
std::vector<int> classIds;
std::vector<float> confidences;
std::vector<cv::Rect> boxes;int strides[]={8,16,32};
std::vector<std::vector<int>> anchors ={{10,13,16,30,33,23},{30,61,62,45,59,119},{116,90,156,198,373,326}};for(size_t k =0; k < outs.size(); k++){float* data = outs[k].ptr<float>();int stride = strides[k];int num_classes = outs[k].size[4]-5;for(int i =0; i < outs[k].size[2]; i++){for(int j =0; j < outs[k].size[3]; j++){for(int a =0; a < outs[k].size[1];++a){float* record = data + a * outs[k].size[2]* outs[k].size[3]* outs[k].size[4]+
i * outs[k].size[3]* outs[k].size[4]+ j * outs[k].size[4];float* cls_ptr = record +5;for(int cls =0; cls < num_classes; cls++){float score =sigmoid(cls_ptr[cls])*sigmoid(record[4]);if(score > confThreshold){float cx =(sigmoid(record[0])*2.f-0.5f+(float)j)*(float)stride;float cy =(sigmoid(record[1])*2.f-0.5f+(float)i)*(float)stride;float w =pow(sigmoid(record[2])*2.f,2)* anchors[k][2* a];float h =pow(sigmoid(record[3])*2.f,2)* anchors[k][2* a +1];float x1 = std::max(0, std::min(cv_src.cols,int((cx - w /2.f)*(float)cv_src.cols /(float)net_size)));float y1 = std::max(0, std::min(cv_src.rows,int((cy - h /2.f)*(float)cv_src.rows /(float)net_size)));float x2 = std::max(0, std::min(cv_src.cols,int((cx + w /2.f)*(float)cv_src.cols /(float)net_size)));float y2 = std::max(0, std::min(cv_src.rows,int((cy + h /2.f)*(float)cv_src.rows /(float)net_size)));
classIds.push_back(cls);
confidences.push_back(score);
boxes.push_back(cv::Rect(cv::Point(x1, y1), cv::Point(x2, y2)));}}}}}}
std::vector<int> indices;
cv::dnn::NMSBoxes(boxes, confidences, confThreshold, nmsThreshold, indices);for(size_t i =0; i < indices.size(); i++){int idx = indices[i];
cv::Rect box = boxes[idx];drawPred(classIds[idx], confidences[idx], box.x, box.y,
box.x + box.width, box.y + box.height, cv_src, classes);}}intmain(int argc,char* argv[]){
std::string path ="images";
std::vector<std::string> filenames;
cv::glob(path, filenames,false);for(auto name : filenames){
cv::Mat cv_src = cv::imread(name);if(cv_src.empty()){continue;}
std::vector<std::string> class_names{"ida","idb"};int net_size =640;
cv::Mat blob = cv::dnn::blobFromImage(cv_src,1.0/255, cv::Size(net_size, net_size),
cv::Scalar(0,0,0),true,false);
cv::dnn::Net net = cv::dnn::readNet("model/ODID_DNN.onnx");constint sz[]={1,12, net_size /2, net_size /2};
cv::Mat input = cv::Mat(4, sz, blob.type());sliceAndConcat(blob,&input);
net.setInput(input);auto t0 = cv::getTickCount();
std::vector<cv::Mat> outs;
net.forward(outs,getOutputNames(net));postprocess(cv_src, outs, class_names, net_size);auto t1 = cv::getTickCount();
std::cout <<"elapsed time: "<<(t1 - t0)*1000.0/ cv::getTickFrequency()<<"ms"<< std::endl;imshow("img", cv_src);
cv::waitKey();}return0;}
四、NCNN推理
NCNN是目前我用到过最好用,也是最容易白嫖的推理加速库,特别是在移动端部署的时候,真的不能更好的了,在些万分感激nihui大佬的无私贡献。这里用的是ncnn编好的ncnn-20210525-windows-vs2019这个版本。
关于yolov5 ncnn推理可以看nihui大佬的知乎。
1.模型简化
https://github.com/daquexian/onnx-simplifier
2 .onnx转ncnn模型
onnx2ncnn yolov5s-sim.onnx yolov5s.param yolov5s.bin
- onnx转为 ncnn 模型,会输出很多 Unsupported slice step!,这是focus模块转换的报错.
- Focus模块在v5中是图片进入backbone前,对图片进行切片操作,具体操作是在一张图片中每隔一个像素拿到一个值,类似于邻近下采样,这样就拿到了四张图片,四张图片互补,长的差不多,但是没有信息丢失,这样一来,将W、H信息就集中到了通道空间,输入通道扩充了4倍,即拼接起来的图片相对于原先的RGB三通道模式变成了12个通道,最后将得到的新图片再经过卷积操作,最终得到了没有信息丢失情况下的二倍下采样特征图。以yolov5s为例,原始的640 × 640 × 3的图像输入Focus结构,采用切片操作,先变成320 × 320 × 12的特征图,再经过一次卷积操作,最终变成320 × 320 × 64的特征图。
- yolov5 Focus模块实现
classFocus(Layer):def__init__(self, filters, kernel_size, strides=1, padding='SAME'):super(Focus, self).__init__()
self.conv = Conv(filters, kernel_size, strides, padding)defcall(self, x):return self.conv(tf.concat([x[...,::2,::2,:],
x[...,1::2,::2,:],
x[...,::2,1::2,:],
x[...,1::2,1::2,:]],
axis=-1))
对应的模型结构:
Split splitncnn_input0 14 images images_splitncnn_0 images_splitncnn_1 images_splitncnn_2 images_splitncnn_3
Crop Slice_4 11 images_splitncnn_3 171-23309=1,0-23310=1,2147483647-23311=1,1
Crop Slice_9 11171176-23309=1,0-23310=1,2147483647-23311=1,2
Crop Slice_14 11 images_splitncnn_2 181-23309=1,1-23310=1,2147483647-23311=1,1
Crop Slice_19 11181186-23309=1,0-23310=1,2147483647-23311=1,2
Crop Slice_24 11 images_splitncnn_1 191-23309=1,0-23310=1,2147483647-23311=1,1
Crop Slice_29 11191196-23309=1,1-23310=1,2147483647-23311=1,2
Crop Slice_34 11 images_splitncnn_0 201-23309=1,1-23310=1,2147483647-23311=1,1
Crop Slice_39 11201206-23309=1,1-23310=1,2147483647-23311=1,2
Concat Concat_40 411761861962062070=0
可视化: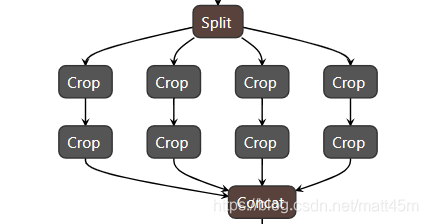
- Focus模块的优点: Focus的作用无非是使图片在下采样的过程中,不带来信息丢失的情况下,将W、H的信息集中到通道上,再使用3 × 3的卷积对其进行特征提取,使得特征提取得更加的充分。
3 . 替换Focus模块
- 更改.param文件 更改前:
Input images 01 images
Split splitncnn_input0 14 images images_splitncnn_0 images_splitncnn_1 images_splitncnn_2 images_splitncnn_3
Crop Slice_4 11 images_splitncnn_3 171-23309=1,0-23310=1,2147483647-23311=1,1
Crop Slice_9 11171176-23309=1,0-23310=1,2147483647-23311=1,2
Crop Slice_14 11 images_splitncnn_2 181-23309=1,1-23310=1,2147483647-23311=1,1
Crop Slice_19 11181186-23309=1,0-23310=1,2147483647-23311=1,2
Crop Slice_24 11 images_splitncnn_1 191-23309=1,0-23310=1,2147483647-23311=1,1
Crop Slice_29 11191196-23309=1,1-23310=1,2147483647-23311=1,2
Crop Slice_34 11 images_splitncnn_0 201-23309=1,1-23310=1,2147483647-23311=1,1
Crop Slice_39 11201206-23309=1,1-23310=1,2147483647-23311=1,2
Concat Concat_40 411761861962062070=0
Convolution Conv_41 112072080=321=311=32=112=13=113=14=114=115=116=15=16=3456
更改后:
Input images 01 images
YoloV5Focus focus 11 images 207
Convolution Conv_41 112072080=321=311=32=112=13=113=14=114=115=116=15=16=3456
4.动态尺寸推理更改
- 静态尺寸推理:按长边缩放到 640xH 或 Wx640,padding 到 640x640 再检测,如果 H/W 比较小,会在 padding 上浪费大量运算。
- 动态尺寸推理:按长边缩放到 640xH 或 Wx640,padding 到 640xH2 或 W2x640 再检测,其中 H2/W2 是 H/W 向上取32倍数,计算量少,速度更快。
- yolov5支持动态尺寸推理, 但这里Reshape 层把输出grid数写死了,不把这三个参数更改成-1的话,则检测的时候会检测不到目标或者检测到满图像都是框。 更改前:
 更改后:
更改后: 5.更改部层数,改到跟当前层数一样大小。
5.更改部层数,改到跟当前层数一样大小。 6.转成FP16模型
6.转成FP16模型
ncnnoptimize yolov5s.param yolov5s.bin yolov5s-opt.param yolov5s-opt.bin65536
6.yolov5s模型输出
anchor(先验框)的信息在 yolov5/models/yolov5s.yaml文件里,pytorch的后处理在 yolov5/models/yolo.py Detect类 forward函数,要对着改成c++代码。
模型有3个输出blob,分别对应于 stride 8/16/32 的输出。
每个输出shape的格式是WHC:
- w=n+5,对应于bbox的dx,dy,dw,dh,bbox置信度,n种分类的置信度。
- h=6400,对应于整个图片里全部anchor的xy,这个1600是stride=8的情况,输入640的图片,宽高划分为640/8=80块,80x80即6400
- c=3,对应于三种anchor。
7.NCNN推理代码,动态注册了YoloV5Focus层。
#include"YoloV5Detect.h"classYoloV5Focus:public ncnn::Layer{public:YoloV5Focus(){
one_blob_only =true;}virtualintforward(const ncnn::Mat& bottom_blob, ncnn::Mat& top_blob,const ncnn::Option& opt)const{int w = bottom_blob.w;int h = bottom_blob.h;int channels = bottom_blob.c;int outw = w /2;int outh = h /2;int outc = channels *4;
top_blob.create(outw, outh, outc,4u,1, opt.blob_allocator);if(top_blob.empty())return-100;#pragmaomp parallel fornum_threads(opt.num_threads)for(int p =0; p < outc; p++){constfloat* ptr = bottom_blob.channel(p % channels).row((p / channels)%2)+((p / channels)/2);float* outptr = top_blob.channel(p);for(int i =0; i < outh; i++){for(int j =0; j < outw; j++){*outptr =*ptr;
outptr +=1;
ptr +=2;}
ptr += w;}}return0;}};DEFINE_LAYER_CREATOR(YoloV5Focus)intinitYolov5Net(std::string& param_path, std::string& bin_path, ncnn::Net& yolov5_net,bool use_gpu){bool has_gpu =false;
yolov5_net.clear();//CPU相关设置(只实现了安卓端)/// 0 = all cores enabled(default)/// 1 = only little clusters enabled/// 2 = only big clusters enabled//ncnn::set_cpu_powersave(2);//ncnn::set_omp_num_threads(ncnn::get_big_cpu_count());#ifNCNN_VULKAN
ncnn::create_gpu_instance();
has_gpu = ncnn::get_gpu_count()>0;#endif
yolov5_net.opt.use_vulkan_compute =(use_gpu && has_gpu);
yolov5_net.opt.use_bf16_storage =true;//动态注册层
yolov5_net.register_custom_layer("YoloV5Focus", YoloV5Focus_layer_creator);//读取模型int rp = yolov5_net.load_param(param_path.c_str());int rb = yolov5_net.load_model(bin_path.c_str());if(rp <0|| rb <0){return-1;}return0;}staticinlinefloatsigmoid(float x){returnstatic_cast<float>(1.f/(1.f+exp(-x)));}staticvoidgenerateProposals(const ncnn::Mat& anchors,int stride,const ncnn::Mat& in_pad,const ncnn::Mat& feat_blob,float prob_threshold, std::vector<Object>& objects){constint num_grid = feat_blob.h;int num_grid_x;int num_grid_y;if(in_pad.w > in_pad.h){
num_grid_x = in_pad.w / stride;
num_grid_y = num_grid / num_grid_x;}else{
num_grid_y = in_pad.h / stride;
num_grid_x = num_grid / num_grid_y;}constint num_class = feat_blob.w -5;constint num_anchors = anchors.w /2;for(int q =0; q < num_anchors; q++){constfloat anchor_w = anchors[q *2];constfloat anchor_h = anchors[q *2+1];const ncnn::Mat feat = feat_blob.channel(q);for(int i =0; i < num_grid_y; i++){for(int j =0; j < num_grid_x; j++){constfloat* featptr = feat.row(i * num_grid_x + j);// find class index with max class scoreint class_index =0;float class_score =-FLT_MAX;for(int k =0; k < num_class; k++){float score = featptr[5+ k];if(score > class_score){
class_index = k;
class_score = score;}}float box_score = featptr[4];float confidence =sigmoid(box_score)*sigmoid(class_score);if(confidence >= prob_threshold){// yolov5/models/yolo.py Detect forward// y = x[i].sigmoid()// y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i].to(x[i].device)) * self.stride[i] # xy// y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # whfloat dx =sigmoid(featptr[0]);float dy =sigmoid(featptr[1]);float dw =sigmoid(featptr[2]);float dh =sigmoid(featptr[3]);float pb_cx =(dx *2.f-0.5f+ j)* stride;float pb_cy =(dy *2.f-0.5f+ i)* stride;float pb_w =pow(dw *2.f,2)* anchor_w;float pb_h =pow(dh *2.f,2)* anchor_h;float x0 = pb_cx - pb_w *0.5f;float y0 = pb_cy - pb_h *0.5f;float x1 = pb_cx + pb_w *0.5f;float y1 = pb_cy + pb_h *0.5f;
Object obj;
obj.rect.x = x0;
obj.rect.y = y0;
obj.rect.width = x1 - x0;
obj.rect.height = y1 - y0;
obj.label = class_index;
obj.prob = confidence;
objects.push_back(obj);}}}}}staticinlinefloatintersectionArea(const Object& a,const Object& b){
cv::Rect_<float> inter = a.rect & b.rect;return inter.area();}staticvoidqsortDescentInplace(std::vector<Object>& faceobjects,int left,int right){int i = left;int j = right;float p = faceobjects[(left + right)/2].prob;while(i <= j){while(faceobjects[i].prob > p)
i++;while(faceobjects[j].prob < p)
j--;if(i <= j){// swap
std::swap(faceobjects[i], faceobjects[j]);
i++;
j--;}}#pragmaomp parallel sections{#pragmaomp section{if(left < j)qsortDescentInplace(faceobjects, left, j);}#pragmaomp section{if(i < right)qsortDescentInplace(faceobjects, i, right);}}}staticvoidqsortDescentInplace(std::vector<Object>& faceobjects){if(faceobjects.empty())return;qsortDescentInplace(faceobjects,0, faceobjects.size()-1);}staticvoidnmsSortedBboxes(const std::vector<Object>& faceobjects, std::vector<int>& picked,float nms_threshold){
picked.clear();constint n = faceobjects.size();
std::vector<float>areas(n);for(int i =0; i < n; i++){
areas[i]= faceobjects[i].rect.area();}for(int i =0; i < n; i++){const Object& a = faceobjects[i];int keep =1;for(int j =0; j <(int)picked.size(); j++){const Object& b = faceobjects[picked[j]];// intersection over unionfloat inter_area =intersectionArea(a, b);float union_area = areas[i]+ areas[picked[j]]- inter_area;// float IoU = inter_area / union_areaif(inter_area / union_area > nms_threshold)
keep =0;}if(keep){
picked.push_back(i);}}}inttargetDetection(cv::Mat& cv_src, ncnn::Net& yolov5_net, std::vector<Object>& objects,int target_size,float prob_threshold,float nms_threshold){int w = cv_src.cols, h = cv_src.rows;float scale =1.0f;if(w > h){
scale =(float)target_size /(float)w;
w = target_size;
h = h * scale;}else{
scale =(float)target_size /(float)h;
h = target_size;
w = w * scale;}
ncnn::Mat ncnn_in = ncnn::Mat::from_pixels_resize(cv_src.data, ncnn::Mat::PIXEL_BGR2RGB, cv_src.cols, cv_src.rows, w, h);//边缘扩展检测的尺寸//源码在 yolov5/utils/datasets.py letterbox方法int wpad =(w +31)/32*32- w;int hpad =(h +31)/32*32- h;
ncnn::Mat in_pad;
ncnn::copy_make_border(ncnn_in, in_pad, hpad /2, hpad - hpad /2, wpad /2, wpad - wpad /2, ncnn::BORDER_CONSTANT,114.f);constfloat norm_vals[3]={1/255.f,1/255.f,1/255.f};
in_pad.substract_mean_normalize(0, norm_vals);//创建一个提取器
ncnn::Extractor ex = yolov5_net.create_extractor();
ex.input("images", in_pad);
std::vector<Object> proposals;//stride 8{
ncnn::Mat out;
ex.extract("750", out);
ncnn::Mat anchors(6);
anchors[0]=10.f;
anchors[1]=13.f;
anchors[2]=16.f;
anchors[3]=30.f;
anchors[4]=33.f;
anchors[5]=23.f;
std::vector<Object> objects8;generateProposals(anchors,8, in_pad, out, prob_threshold, objects8);
proposals.insert(proposals.end(), objects8.begin(), objects8.end());} stride 16{
ncnn::Mat out;
ex.extract("771", out);
ncnn::Mat anchors(6);
anchors[0]=30.f;
anchors[1]=61.f;
anchors[2]=62.f;
anchors[3]=45.f;
anchors[4]=59.f;
anchors[5]=119.f;
std::vector<Object> objects16;generateProposals(anchors,16, in_pad, out, prob_threshold, objects16);
proposals.insert(proposals.end(), objects16.begin(), objects16.end());}// stride 32{
ncnn::Mat out;
ex.extract("791", out);
ncnn::Mat anchors(6);
anchors[0]=116.f;
anchors[1]=90.f;
anchors[2]=156.f;
anchors[3]=198.f;
anchors[4]=373.f;
anchors[5]=326.f;
std::vector<Object> objects32;generateProposals(anchors,32, in_pad, out, prob_threshold, objects32);
proposals.insert(proposals.end(), objects32.begin(), objects32.end());}// sort all proposals by score from highest to lowestqsortDescentInplace(proposals);// apply nms with nms_threshold
std::vector<int> picked;nmsSortedBboxes(proposals, picked, nms_threshold);int count = picked.size();
objects.resize(count);for(int i =0; i < count; i++){
objects[i]= proposals[picked[i]];// adjust offset to original unpaddedfloat x0 =(objects[i].rect.x -(wpad /2))/ scale;float y0 =(objects[i].rect.y -(hpad /2))/ scale;float x1 =(objects[i].rect.x + objects[i].rect.width -(wpad /2))/ scale;float y1 =(objects[i].rect.y + objects[i].rect.height -(hpad /2))/ scale;// clip
x0 = std::max(std::min(x0,(float)(cv_src.cols -1)),0.f);
y0 = std::max(std::min(y0,(float)(cv_src.rows -1)),0.f);
x1 = std::max(std::min(x1,(float)(cv_src.cols -1)),0.f);
y1 = std::max(std::min(y1,(float)(cv_src.rows -1)),0.f);
objects[i].rect.x = x0;
objects[i].rect.y = y0;
objects[i].rect.width = x1 - x0;
objects[i].rect.height = y1 - y0;}return0;}voiddrawObjects(const cv::Mat& cv_src,const std::vector<Object>& objects,std::vector<std::string>& class_names){
cv::Mat cv_detect = cv_src.clone();for(size_t i =0; i < objects.size(); i++){const Object& obj = objects[i];
std::cout <<"Object label:"<< obj.label <<" Object prod:"<< obj.prob
<<" Object rect"<< obj.rect << std::endl;
cv::rectangle(cv_detect, obj.rect, cv::Scalar(255,0,0));
std::string text = class_names[obj.label]+" "+std::to_string(int(obj.prob *100))+"%";int baseLine =0;
cv::Size label_size = cv::getTextSize(text, cv::FONT_HERSHEY_SIMPLEX,0.5,1,&baseLine);int x = obj.rect.x;int y = obj.rect.y - label_size.height - baseLine;if(y <0)
y =0;if(x + label_size.width > cv_detect.cols)
x = cv_detect.cols - label_size.width;
cv::rectangle(cv_detect, cv::Rect(cv::Point(x, y), cv::Size(label_size.width, label_size.height + baseLine)),
cv::Scalar(255,255,255),-1);
cv::putText(cv_detect, text, cv::Point(x, y + label_size.height),
cv::FONT_HERSHEY_SIMPLEX,0.5, cv::Scalar(0,0,0));}
cv::imshow("image", cv_detect);}intmain(void){
std::string parma_path ="models/ODIDF16.param";
std::string bin_parh ="models/ODIDF16.bin";
ncnn::Net yolov5_net;initYolov5Net(parma_path,bin_parh,yolov5_net,true);
std::vector<std::string> class_names{"ida","idb","idback","idhead"};
std::string path ="images";
std::vector<std::string> filenames;
cv::glob(path, filenames,false);for(auto name : filenames){
cv::Mat cv_src = cv::imread(name);if(cv_src.empty()){continue;}
std::vector<Object> objects;double start =static_cast<double>(cv::getTickCount());targetDetection(cv_src, yolov5_net, objects);double time =((double)cv::getTickCount()- start)/ cv::getTickFrequency();
std::cout << name <<"Detection time:"<< time <<"(second) "<< std::endl;drawObjects(cv_src, objects, class_names);
cv::waitKey();}return0;}
五、 编译NCNN
1.依赖库:
- protobuf-3.4.0 下载地址:https://github.com/google/protobuf/archive/v3.4.0.zip 打开VS2017或者VS2019本机工具命令,切到源码目录
cd protobuf
mkdir build
cd build
cmake -G"NMake Makefiles" -DCMAKE_BUILD_TYPE=Release -DCMAKE_INSTALL_PREFIX=%cd%/install -Dprotobuf_BUILD_TESTS=OFF -Dprotobuf_MSVC_STATIC_RUNTIME=OFF ../cmake
nmake
nmake install
- Vulkan https://vulkan.lunarg.com/sdk/home 版本:VulkanSDK-1.2.141.2 直接点击安装,之后验证是否安装成功,运行C:\VulkanSDK\1.2.141.2\Bin\vkcube.exe,出现下面图像代表安装成功。

- glfw https://www.glfw.org/ 把glfw-3.3.2.bin.WIN64复制到VulkanSDK\1.2.141.2\Third-Party
- GLM https://github.com/g-truc/glm/ 把GLM复制到VulkanSDK\1.2.141.2\Third-Party
- 添加系统路径
 2.NCNN增加自定义层 在代码里面注册自定义层时,用ncnn2mem转换模型之后在移动端推理时会报读入模型错误的问题,ncnn2mem之后的模型是以.h方式全部读入到内存,内存方式注册自定义层的时候,要用 TYPEINDEX 枚举,这里可参考ncnn的增加自定义层。之前用的ncnn库都是下载编译好的库,要增加自定义则要git源码进行重新编译。 2.1 添加自己定义层。
2.NCNN增加自定义层 在代码里面注册自定义层时,用ncnn2mem转换模型之后在移动端推理时会报读入模型错误的问题,ncnn2mem之后的模型是以.h方式全部读入到内存,内存方式注册自定义层的时候,要用 TYPEINDEX 枚举,这里可参考ncnn的增加自定义层。之前用的ncnn库都是下载编译好的库,要增加自定义则要git源码进行重新编译。 2.1 添加自己定义层。 - git 源码
git clone https://github.com/Tencent/ncnn.git
cd ncnn
git submodule update --init
- 在ncnn定义源码添加.h文件:src/layer/YoloV5Focus.h YoloV5Focus.h
#ifndefLAYER_YOLOOCUS_H#defineLAYER_YOLOOCUS_H#include"layer.h"namespace ncnn
{classYoloV5Focus:publicLayer{public:YoloV5Focus();virtualintforward(const ncnn::Mat& bottom_blob, ncnn::Mat& top_blob,const ncnn::Option& opt)const;};}#endif
- 在ncnn定义源码添加.cpp文件:src/layer/YoloV5Focus.cpp YoloV5Focus.cpp
#include"YoloV5Focus.h"namespace ncnn
{YoloV5Focus::YoloV5Focus(){
one_blob_only =true;//support_inplace = true;}intYoloV5Focus::forward(const ncnn::Mat& bottom_blob, ncnn::Mat& top_blob,const ncnn::Option& opt)const{int w = bottom_blob.w;int h = bottom_blob.h;int channels = bottom_blob.c;int outw = w /2;int outh = h /2;int outc = channels *4;
top_blob.create(outw, outh, outc,4u,1, opt.blob_allocator);if(top_blob.empty())return-100;#pragmaomp parallel fornum_threads(opt.num_threads)for(int p =0; p < outc; p++){constfloat* ptr = bottom_blob.channel(p % channels).row((p / channels)%2)+((p / channels)/2);float* outptr = top_blob.channel(p);for(int i =0; i < outh; i++){for(int j =0; j < outw; j++){*outptr =*ptr;
outptr +=1;
ptr +=2;}
ptr += w;}}return0;}}
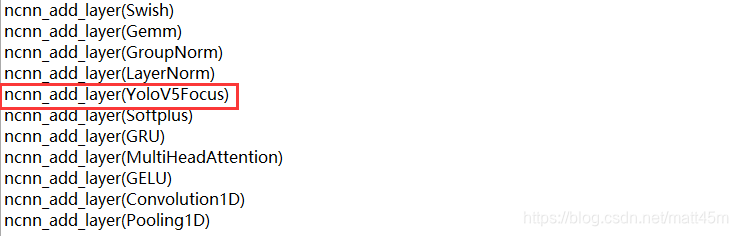
- 修改 src/CMakeLists.txt 注册 layer/YoloV5Focus
ncnn_add_layer(GroupNorm)ncnn_add_layer(LayerNorm)ncnn_add_layer(YoloV5Focus)
- win下OP的名字是大小写不分的,但在别的系统或者移动端要注意层名称的大小写问题。
- 编译ncnn 打开VS2017或者VS2019本机工具命令,切到源码目录
mkdir build
cd build
cmake -G"NMake Makefiles" -DCMAKE_BUILD_TYPE=Release -DCMAKE_INSTALL_PREFIX=%cd%/install -DProtobuf_INCLUDE_DIR=D:/LIB/protobuf/build/install/include -DProtobuf_LIBRARIES=D:/LIB/protobuf/build/install/lib/libprotobuf.lib -DProtobuf_PROTOC_EXECUTABLE=D:/LIB/protobuf/build/install/bin/protoc.exe -DNCNN_VULKAN=ON ..
nmake
nmake install
2.使用添加自己定义层的NCNN库的话,上面的推理代码就可以不用动态注册层的那部分
classYoloV5Focus:public ncnn::Layer{public:YoloV5Focus(){
one_blob_only =true;}virtualintforward(const ncnn::Mat& bottom_blob, ncnn::Mat& top_blob,const ncnn::Option& opt)const{int w = bottom_blob.w;int h = bottom_blob.h;int channels = bottom_blob.c;int outw = w /2;int outh = h /2;int outc = channels *4;
top_blob.create(outw, outh, outc,4u,1, opt.blob_allocator);if(top_blob.empty())return-100;#pragmaomp parallel fornum_threads(opt.num_threads)for(int p =0; p < outc; p++){constfloat* ptr = bottom_blob.channel(p % channels).row((p / channels)%2)+((p / channels)/2);float* outptr = top_blob.channel(p);for(int i =0; i < outh; i++){for(int j =0; j < outw; j++){*outptr =*ptr;
outptr +=1;
ptr +=2;}
ptr += w;}}return0;}};DEFINE_LAYER_CREATOR(YoloV5Focus)//动态注册层
yolov5_net.register_custom_layer("YoloV5Focus", YoloV5Focus_layer_creator);
六、NCNN Int8量化模型
1.优化模型
./ncnnoptimize yolov5.param yolov5.bin yolov5-opt.param yolov5-opt.bin 0
2.生成校准表
./ncnn2table yolov5s-opt.param yolov5s-opt.bin imagelist.txt yolov5s-opt.table mean=[0,0,0]norm=[0.0039215,0.0039215,0.0039215]shape=[416,416,3]pixel=BGR thread=8method=kl
3.int8量化模型
./ncnn2int8 yolov5s-opt.param yolov5s-opt.bin yolov5s-int8.param yolov5s-int8.bin yolov5s.table
4.int 8量化过的模型在移动端和一些边缘设备上的速度有明显的提升,但精度有少许下降。
版权归原作者 知来者逆 所有, 如有侵权,请联系我们删除。