
目录
一、结构设计理念及经验
先说说我对这个组的理解:硬件=入场卷(没有硬件压根就不用去比赛);控制=根基(哪怕没有视觉和结构的情况下依然可以完赛);视觉=提高(可以减少掉识别错误所增加的秒数,甚至优化找卡算法等等)结构=锦上添花(如果不追求国一国特,拿国奖没有结构也是可以的,但是一个好的结构也确实可以减缓视觉和控制的压力)。
根据对十九届赛题的解读和18届自制结构所产生的问题里,发现机械臂的速度想要变的很快就必须跟凤凰结构的机械臂类似,同时为了能**完成多卡投放**和结构**重心居于中间**,同时为了**简化控制算法**,研究菠萝结构的优势,最后借鉴菠萝和凤凰的设计上重新设计。效果如图所示:
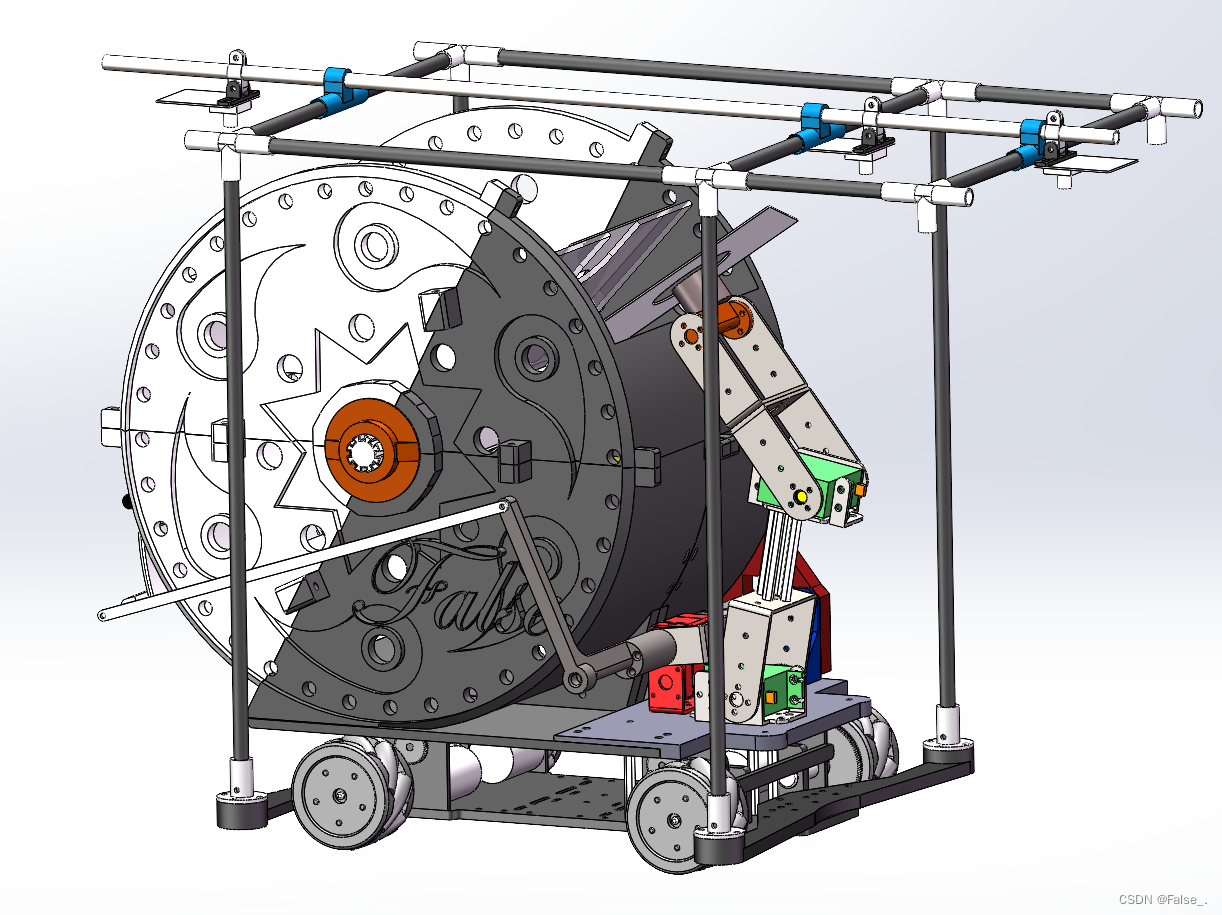
图1.1 总设计图
二、材料准备
2.1制作工具类
拓竹3D打印机(需要稍微较高的精度)、电锯(方便切割不锈钢管和碳素杆)、30cm的长螺丝刀、锉刀、不锈钢尺、多功能螺丝刀套装、激光切割机等。
注:孔位已经在模型中设置好,如需要再次扩孔请使用手钻机。
2.2机械类
螺栓:不锈钢大扁头M3*25(**螺1**)、十字扁平头M3*50(**螺2**)、十字扁平头M4*25(**螺3**)、十字扁平头M3*16(**螺4**)、内六角螺栓M4*20(**螺5**)、内六角螺栓M4*70(**螺6**)。
螺母:M3普通螺母、M4普通螺母。
舵机拉杆:M3×250mm*2(**拉1**)。
机械臂舵机支架:万能支架*3、大长 U 型支架*3、杯式轴承*2、25T舵机通用圆盘*3。
轴承:内20外40厚12*2(**承1**)、推力球平面轴承内8外14厚4*2(**承2**)、法兰轴承内8外12厚3.5*4(**承3**)。
铜柱:M3*50(**铜1**)、M3*45(**铜2**)。
2.3耗材类
砂纸60目(**砂1**)、砂纸500目(**砂2**)、502胶水(或ab胶)、餐巾纸、润滑油、不锈钢管、双面模数贴带、3mm亚力克板、不锈钢空心管外8mm厚0.5mm×1m*1。
塑料小管子连接件:内径8mm立体三通*10、内径8mm立体四通*12。
逐飞:摄像头固定底座法兰*4(**法1**)、摄像头支架多功能底座*4、8mm铝制三通*3。
碳素杆:350mm*4(**碳1**)、120mm*2(**碳2**)、275mm*2(**碳3**)、263mm*3(**碳4**)、(碳素杆均为外8内6的圆管)。
2.4电子元件类
DS3225 25kg 360°可控舵机*1、TD8820金属数字舵机20kg*2、RDS3115数码25kg双轴舵机270°*1
注:后续图中会标注使用那些螺栓上到什么位置,括号内仅为每个的代号。
三、模型打印参数
打印须知:稍微需要较高精度,建议使用拓竹系列打印机。打印材料请选用**PLA**或**PETG**,密闭打印会产生热变形影响曲面。最好全部用同一材料!
颜色**最好**只有**白、黑、灰**三色,参杂别的颜色**可能**会对视觉产生影响。
为了符合普通3D打印机(*256mm x 256mm x 256mm*)能打印的最大尺寸,笔者对整体模型进行了拆分和多层加固处理。
网盘链接:https://pan.baidu.com/s/1MMP3Tv4UDzpV3I_fhjVXgg?pwd=63da提取码:63da
(链接中只有STEP格式和DWG格式,后续开源文件可能在b站视频中放出)
文件名填充密度填充图案数量备用车后端底座 .STEP45%三角形1车前后端底座.STEP45%三角形1电磁铁增长端.STEP35%网格1舵机圆柱齿轮45×2.STEP40%网格1圆柱齿轮45×2.STEP40%网格1舵机平台.STEP75%三角形1前板辅助受力.STEP25%网格1摄像头横向支架.STEP25%网格3双轴舵机架子.STEP100%直线2特殊轴.STEP40%网格1新备用后端释放仓.STEP25%网格1新支架.STEP35%网格1支架后.STEP18%网格1支架后上.STEP18%网格1支架前.STEP18%网格1支架右.STEP18%网格1支架左.STEP18%网格1阻挡法兰.STEP25%网格1
卡片仓.DXF 激光切割机 切。
打印速度选用自己打印机效果最好的速度即可。
四、制作步骤
**在拥有了所有的制作零件后,就到了正式的制作环节啦!**
因本身设计时拆分成两部分单独设计,互不影响,故后文中分开介绍。
强烈建议先阅读一遍后按顺序制作!!!!
4.1摄像头支架部分制作
图4.1 支架设计模型图
支架设计中,主要考虑控制需要总钻风什么样的角度,Openart需要多少的高度,不影响其他功能结构位置的容错和尽可能保证支架稳定不晃动,以这几个为大前提进行设计。
4.1.1支架安装
首先是对前后两端底座的安装(**备用车后端底座 .STEP**和**车前后端底座.STEP**),首先将前后支架的孔位对齐,以绿线为对称轴,在红圈中的**10**个孔位,**对称**着安装**4-8**个**螺3**,以此来稳固底盘,确保安装底座支架跟车底板受力保持一致。
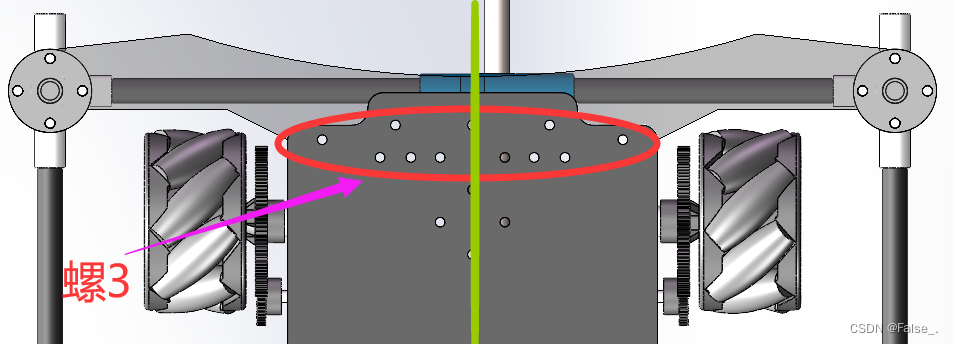
图4.2 支架安装参考图
** 4.1.2法兰安装**
** 将已经安装好车底板,根据图示地方安装上法1和螺1(或螺2)+M3螺母**,为后边碳素杆的安装做准备。
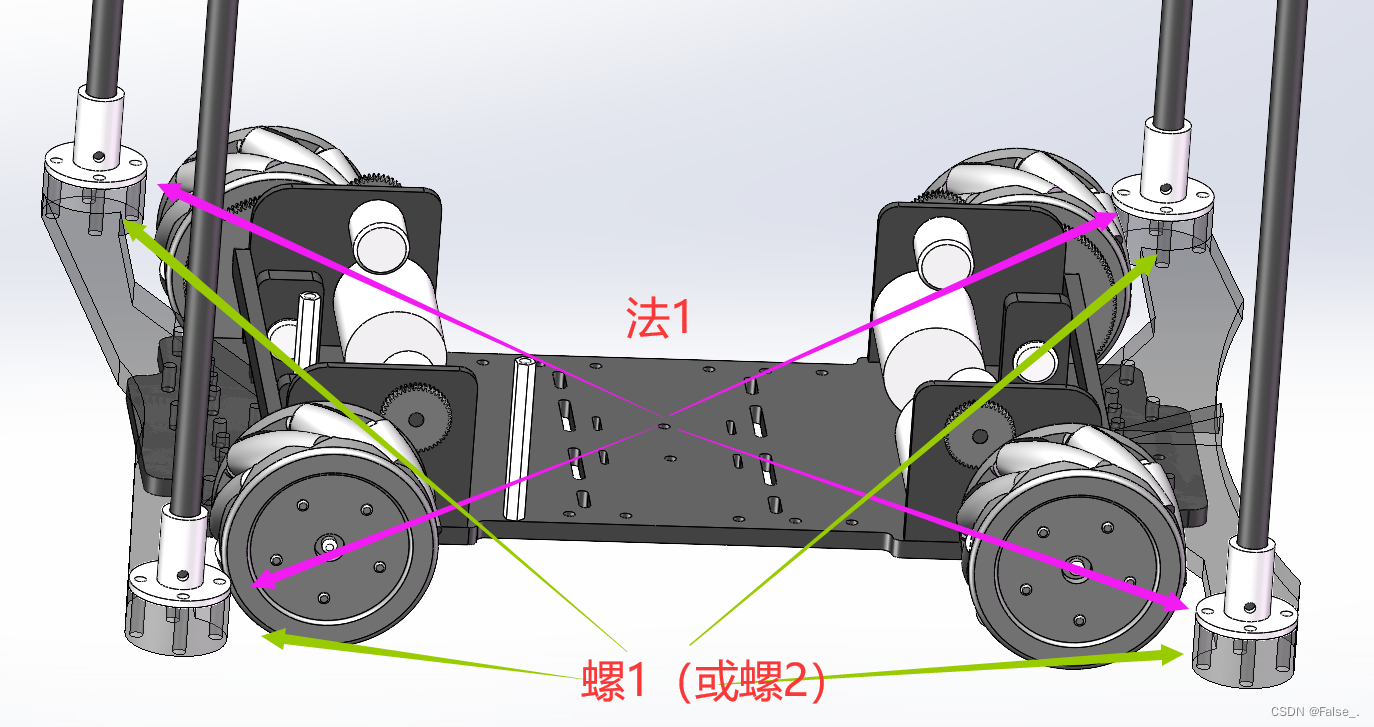
图4.3 法兰安装参考图
** 4.1.3碳素杆安装**
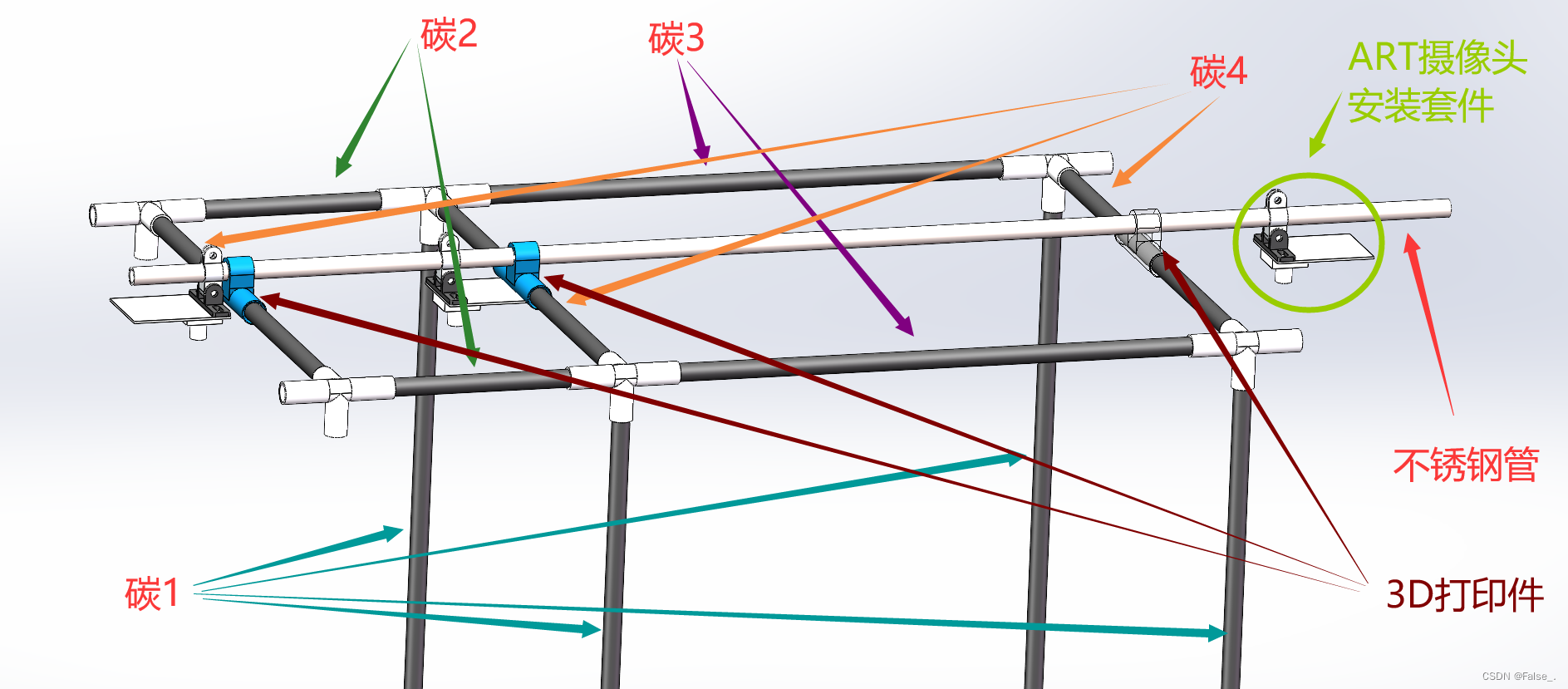
图4.4 碳素杆安装参考图
与底部连接安装的**碳1**跟**法1**,上端根据图片所示在需要的地方安装**内径8mm立体四通**连接**碳2、碳3和碳4,**不锈钢管与碳素杆的连接是依靠**3D打印件(摄像头横向支架.STEP****)**,这样设计会产生一个自锁,如果不锈钢管不是与横着的碳素杆垂直就无法安装上去。**ART摄像头套件**包括**摄像头支架多功能底座**和**8mm铝制三通**用于固定在**不锈钢管,**方便控制与视觉选定合适的摄像头的角度和位置。
** **** 注:此处的支架设计是基于两点**
** 1、完全不影响其他功能的运作。**
** 2、根据摄像头计算出来所需参数,可以根据自己视觉部分的需要改变碳素杆的长度。**
** 以一个简单例子为例,现在离地高度是40cm,然后在分辨率320280的视野里看到卡片的长宽像素值约为40,且已知卡片实际值即为120mm,即可得出1个像素的值为3mm。根据这个值,以及我们所需的值(比如模型参数为9696,所以我们需要120/96=1.25mm),来更换所需要的摄像头,以使摄像头能采集到足够的像素点。**
4.2仓库部分制作
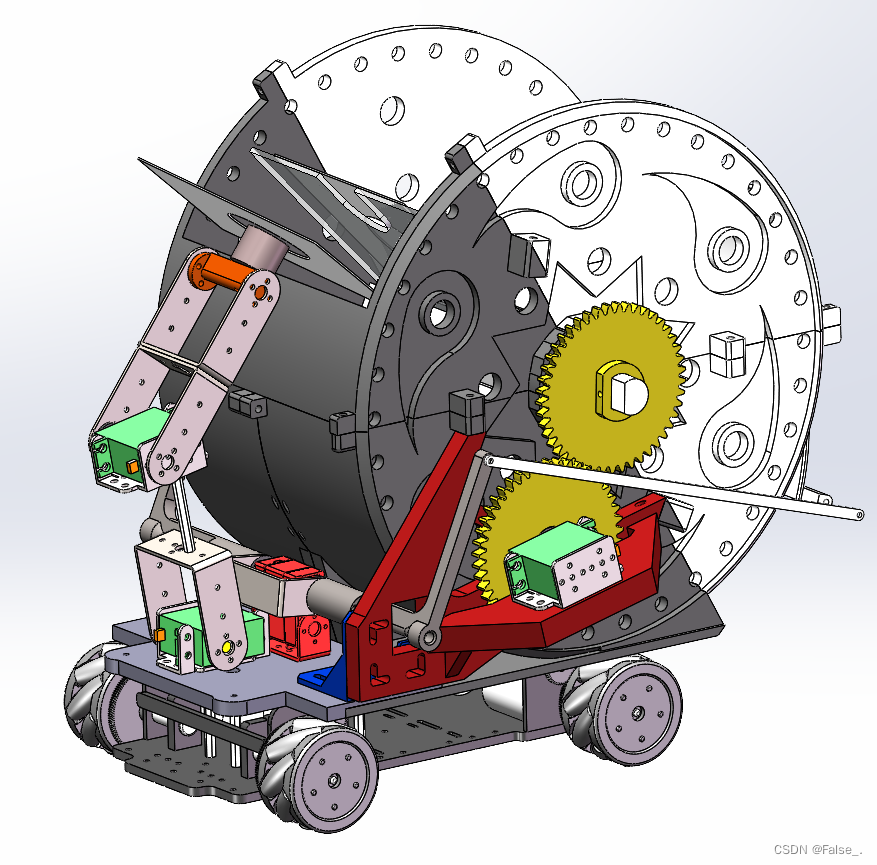
图4.5 仓库设计模型图
在仓库设计中,前端借鉴了凤凰结构的抓卡方式,后端参考菠萝结构改进优化。外观设计中有72个小孔、16个中孔、16个小角、12个大孔和6个太极,以此来加入**幸运buff**;旋转仓库依靠齿轮传动,确保每个位置的精准投放;后端关仓口采用双轴舵机连杆进行关闭与打开。
4.2.1蜗牛壳制作
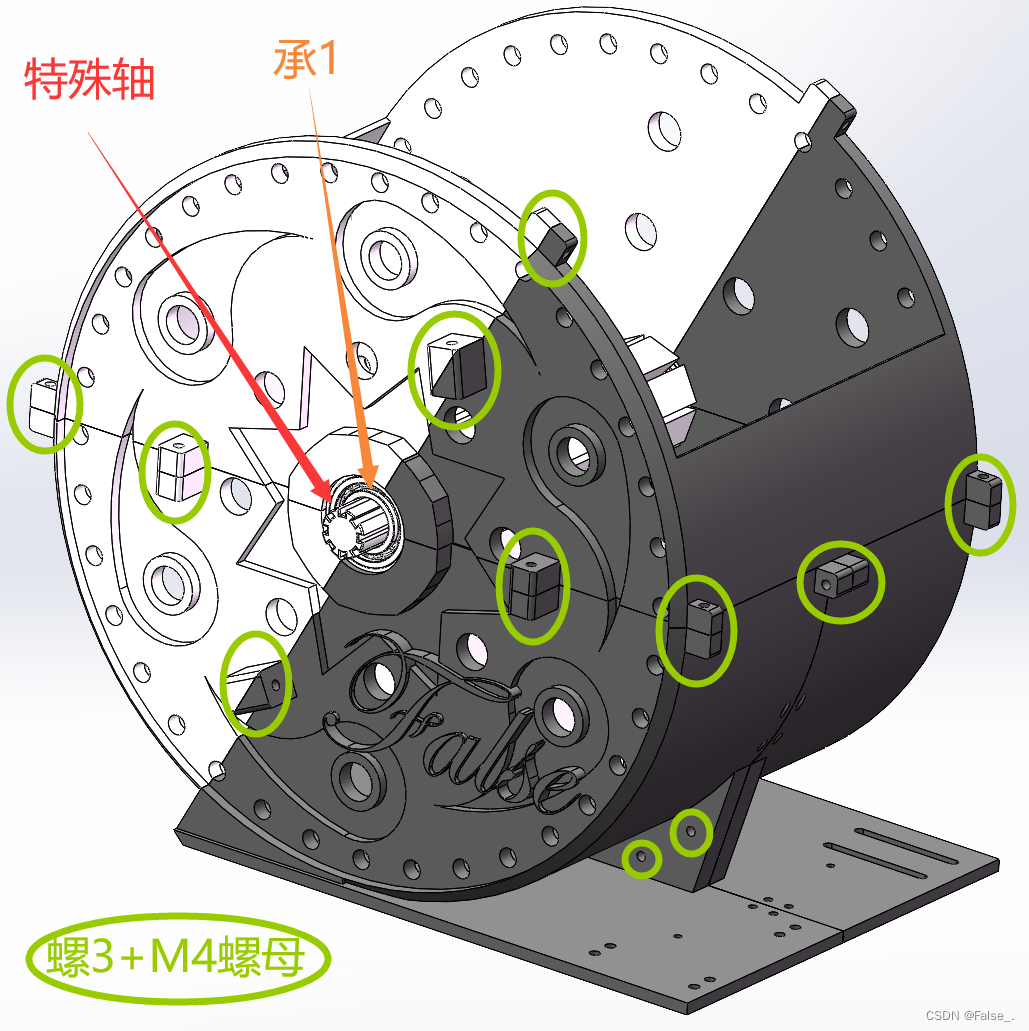
图4.6 右面安装参考图
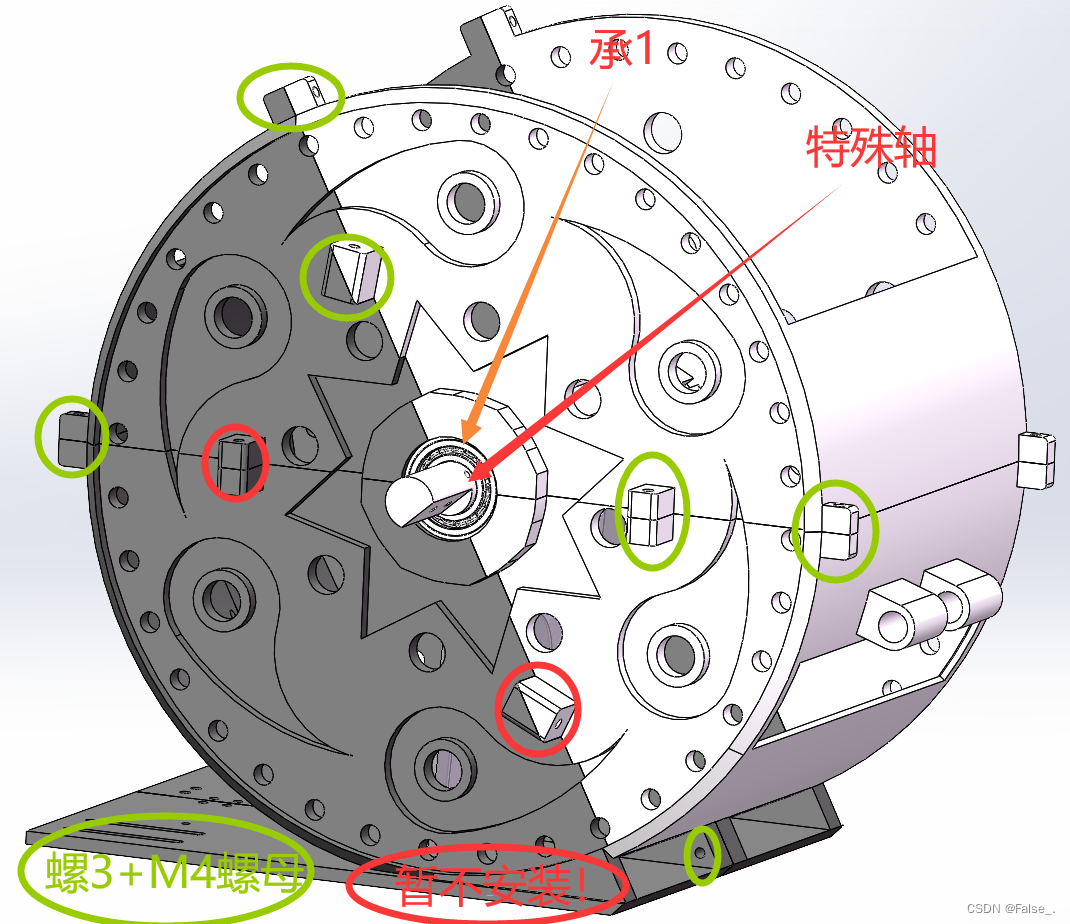
图4.7 左面安装参考图
左右面安装如图4.6和图4.7所示,绿色圆圈标注的孔位用**螺3**和**M4螺母**固定,同时也产生了一个自锁,每个壳体打印件一般会与3个及以上打印件进行连接固定,相互制约互锁。中间需提前安装好**承1**跟**特殊轴**,**承1**顶入到特殊轴最大半径处即可,红色圆圈处先暂不安装,后面要与别的特殊件共同安装。右面特殊轴上需安装**阻挡法兰.STEP**,**特殊轴.STEP**和**阻挡法兰.STEP**上均有孔位,安装**螺2**即可。
4.2.2辅助受力板安装
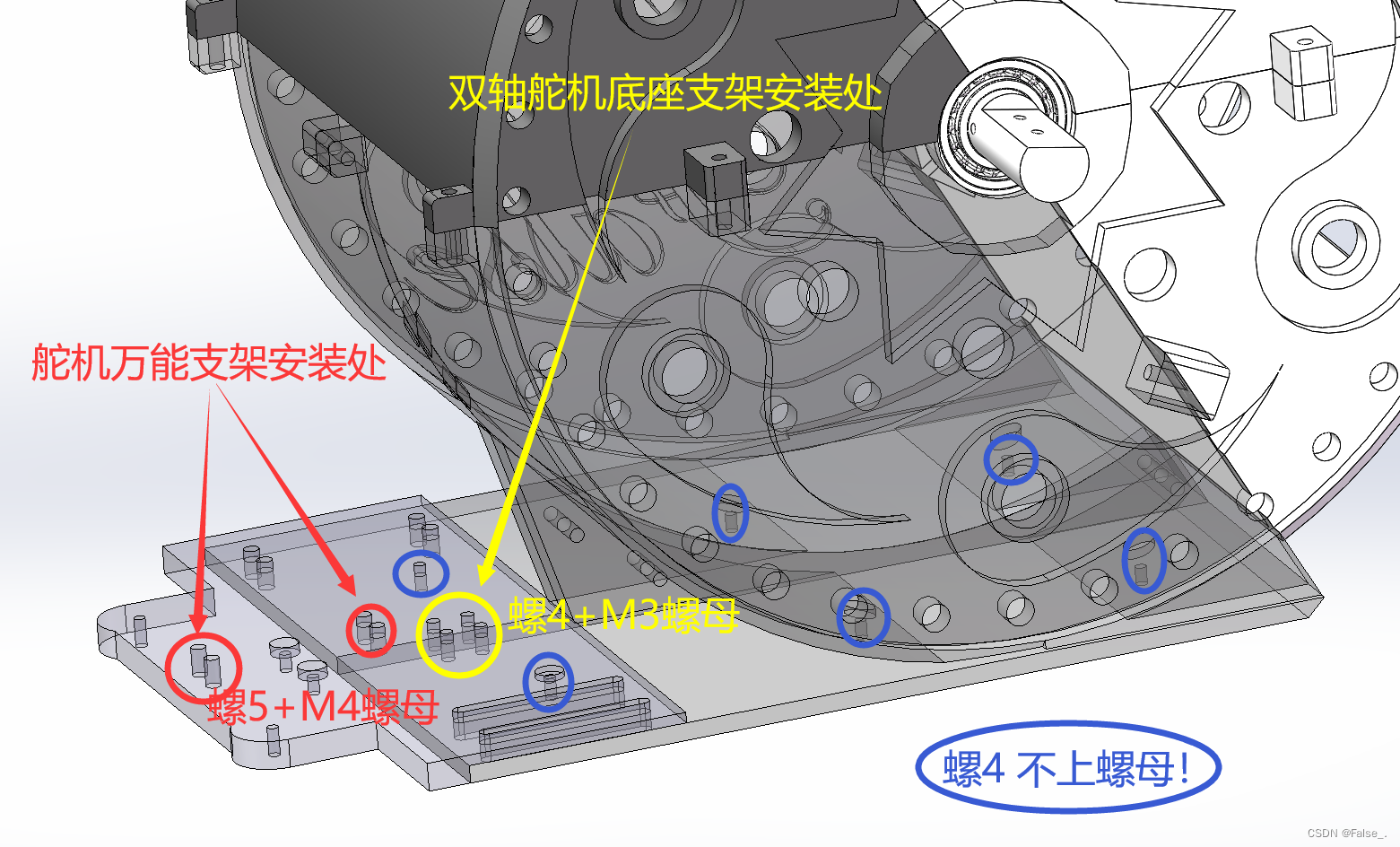
图4.8 辅助受力板安装示意图
在上一步安装好以后,先对蓝色圈处安装**螺4**,这些孔位下端安装**铜2,铜2**再与**M车**底板对应孔位安装,以此来固定。红色圆圈处的舵机万能支架可以根据图4.9先安装**螺5**和**M4螺母**,同时黄色圆圈处也可以先安装底座支架安装**螺4**和**M3螺母**且可以不用考虑底座支架方向。

图4.9 舵机安装支架方向示意图
4.2.3仓库转动部分安装

图4.10 蓝色支架安装
左上角图为螺栓的安置示意,螺栓头在板下侧,在绿色圆圈处安装**螺3**和**M4螺母**,但是先不用上紧,为后续安装做准备,同时可以根据图4.10所示先安装部分舵机。

图4.11 侧面支架安装图
根据图4.11所示安装位置,安装顺序圆柱齿轮(**舵机圆柱齿轮.STEP**)->舵机铁圆盘(用较短的M3螺栓上紧即可)->舵机->舵机万能支架(从上往下安装**螺3**即可)->侧面支架(**舵机平台.STEP**)

图4.12 侧面支架安装示意图
先安装紫色圆圈处的**螺6**,直接上到底就可,不需要上螺母,因为受力关系的原因,不上螺母也能紧固。蓝色圆圈处,因为之前蓝色的支架是松弛的,对准孔位安装**螺3**和**M4螺母**,同时将之前安装下端未上紧的螺栓上紧。

图4.13 特殊轴齿轮安装示意图
根据图4.13中所示:对准特殊轴安装**圆柱齿轮45×2.STEP**,同时为防止出现偏移和啮合松动,安装两根**螺2**贯穿孔位,不需要安装螺母,方便拆装。
在**特殊轴**的每个槽口处将**单张餐巾纸**和**卡片仓.DXF**同时嵌入进槽口中,再将多余部分的纸撕去,即完成对一个仓的安装,这样的设计是**保证受力的同时便于拆卸**。仓库转动效果图如图所示:

图4.14 仓库转动部分效果图
4.2.4仓库释放部分安装

图4.15 后端挡板零件安装示意图
如图4.15所示、先在相应的地方安装**承3**,再使用碳素杆贯穿,贯穿过程中安装**承2**,两边完全贯穿且留出多余位置即为完成安装。

图4.16 舵机拉杆安装示意图
如图4.16所示、左右两端长杆为舵机拉杆(由于里边是球头,在3D模型中好建模,但是不好体现运动效果,约束一直报错×^×,故设计平头,只为模拟参考使用,实际制作中不会影响其他位置)红圈处相接并长**螺2**和**M3螺母**,上紧即可。

图4.17 旋转连杆安装示意图
如图4.17所示,在红色舵机安装完成后,先安装舵机圆盘再安装舵机支架,但先不用上螺栓,确定好位置后与**双轴舵机架子.STEP**对称安装好后,再安装螺2固定;在绿色圆圈处,靠近壳体一段为**螺1**的螺栓头,使**螺1**、**M3螺母**、打印件和舵机拉杆共同固定在一起。
注:此处安装极为困难,最好使用长30cm的细长螺丝刀,同时安装要先大致模拟舵机运动角度是否能完全打开仓门,我建议将红色舵机0°时尽可能的接近绿色舵机,这样可以使仓门打开的角度更大,且最好在红色舵机0°状态时就使打印件产生微弱的变形,这是一种过盈的变形,要尽可能使后仓门受力嵌入进壳体内壁内。
仓库释放效果如图4.18所示:

图4.18 仓库释放效果图
4.2.5仓库部分打磨

图4.19 仓库打磨示意图
在安装好后,由于制造和安装产生的误差现象,图4.19中三条红线处很容易卡住卡片或者卡片仓,所以应该做的操作是:对红色舵机上电,一直保持一个角度(最好就是仓库的关闭角度),使用**砂1**对图中三条红线处进行打磨,然后用手转动齿轮(先安装一个仓库看效果,其他仓库可以先不急装,最后装剩余仓库也是可以的)看是否可以在不卡涩的状态通过卡片,先测试1张的情况,再测试5张甚至10张的情况,当10张都能正常通过时,使用**砂2**进行细打磨,手摸起来有黑丝的感觉即为打磨完成。(别问我没摸过怎么办,自己买一条摸摸自己的就知道了)
注:此处需要正反转齿轮,要确保正反都是可以稳定通过的。如果内壁面也有不光滑的地方也是可以打磨的。
4.3 机械臂部分制作

图4.20 卡片存在的最小状态和最大状态
首先要考虑卡片存在的任何状态,也就是说,如果我们的仓库不够大的话,也可能会出现两个角卡住仓口,影响后续的抓卡的操作,导致整场比赛失败,但是目前考虑的状态是极端状态,这种卡片在一场比赛出现的可能性是极小的,而我们的结构应该做到什么程度算ok呢,我的建议是完成极限状态的95%状态即为ok,就是在中心线17cm*0.95=16.15cm处每次都能扔进去,即为完成卡的抓取。

图4.21 实际可能出现的演示情况
在实际可能出现的情况中,红色区域是电磁铁击打的位置,蓝色区域是算法偏移电磁铁可能打到的所有情况(正常来说,不可能每次都是最中心点,所以产生偏移其实是一个正常的状态),因此要在这样仓库的基础上继续扩大这个一个长度,因为如果电磁铁打到中心的右端,然后放进去时,卡片的另一边相当于变长了,所以应该在刚刚的基础上应该继续两边扩充仓库口的宽度,一边大约一个铁片的半径即可。
因此抓取的前提条件:1、抓取的任何状态不会被其他部分所影响;
2、能够每次稳定的放进仓口、·
3、电磁铁每次都能稳定吸附。
可以先用SW模拟运动轨迹,确保每个位置没问题再制作,如图4.22所示:

图4.22 机械臂运动轨迹图
此处机械臂安装较为简单,两个舵机万能舵机支架、三个U型长支架、铜柱使用为**铜1、**顶处为**电磁铁增长端.STEP**,对照图示安装即可。

图4.23 机械臂正面示意图

图4.24 机械臂背面示意图
更多关于机械臂和电磁铁的内容请参考凤凰四分类搬运结构_v2.1.pdf。
五、力学分析(简易)
5.1仓底板与M车

图5.1 M车底板与上仓受力分析图
由图5.1可知,在二维平面上,绿色箭头为整体重力,然后M车两边的红色箭头为支持力。但在3D空间中,设计时,就是以四处轮毂旁边的支撑板作为整体支撑,且中间会安装4-10根**铜2**作为辅助支撑,相当于同时有8处甚至10处以上同时产生支持力,确保上仓的与M车的受力和稳定性。
5.2齿轮侧面支撑

图5.2 侧面支撑受力图
由图5.2可知,绿色箭头为受其他物体产生的支撑力,红色箭头为整体重心的重力。绿色箭头中大部分力是M4螺栓产生,然后由**支架前.STEP、支架左.STEP、支架后.STEP、电机支架.STEP**四个打印件共同约束自锁,同时**电机支架.STEP**与**前板辅助受力.STEP**固定,保证了侧面支架的稳定性与齿轮啮合的稳定性。
六、结语
在此,感谢智能车竞赛一路相伴的队友和朋友们(太多了就不一一列举了),特别感谢风佬、凤凰佬、桀桀佬、水鬼佬在去年的帮助。
也祝看到这里的车友们赛出水平,赛出风采,取得好成绩!٩(๑^o^๑)۶

贴张自拍好吧~
参考:
凤凰四分类搬运结构_v2.1.pdf
安徽中医药大学_凌泉·freedom_智能视觉.doc
版权归原作者 False_. 所有, 如有侵权,请联系我们删除。