
资源下载地址:https://download.csdn.net/download/sheziqiong/85773209
资源下载地址:https://download.csdn.net/download/sheziqiong/85773209
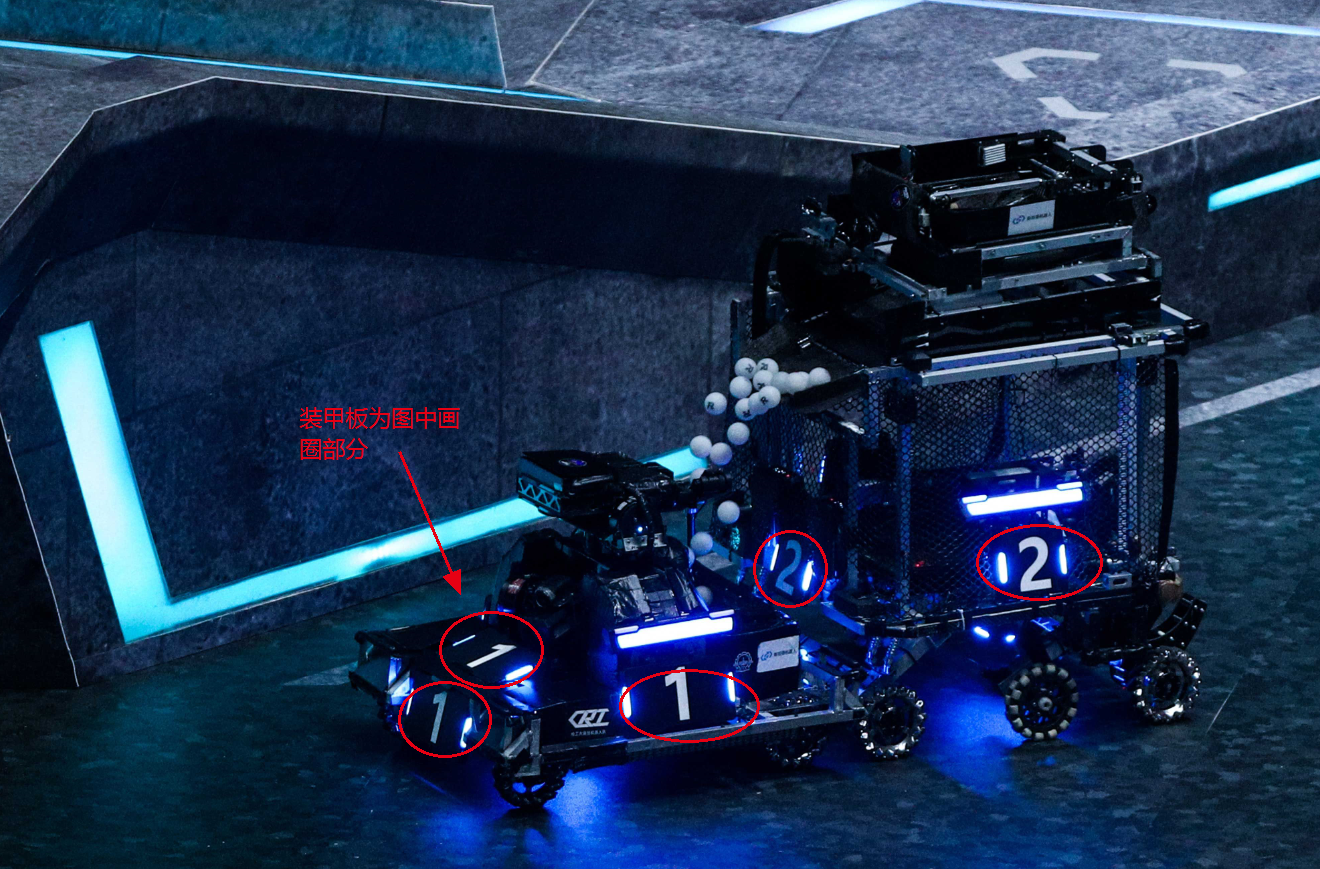
装甲板检测
由于在比赛过程中操作手是第一视角,很难用手动瞄准。通过装甲板检测就是自瞄系统,己方车辆可自动瞄准敌方车辆装甲板,对敌方造成有效的伤害。大大提高了射击精准度。
功能:检测装甲板的位置并把位置发送给电控
- 在目标旋转时保证目标的位置的稳定性
- 系统延时尽可能短
- 在多目标时,保证打击的一致性
整体架构
文件描述
文件名作用main.cpp算法主函数,包括多线程处理步骤caffe_model.cpp自己训练的装甲板贴纸分类模型cctag_detector.cpp老版圆形贴纸识别圆形的方法coordinate_process.cpp根据通信协议对最终左边进行处理的方法detector_methods.cpp装甲板检测的主要方法(包括预处理,逻辑判断等)serialport.cppLinux 下串口使用的文件v4l2.cppLinux 下利用 V4L2 来调节摄像头的曝光饱和度等参数。
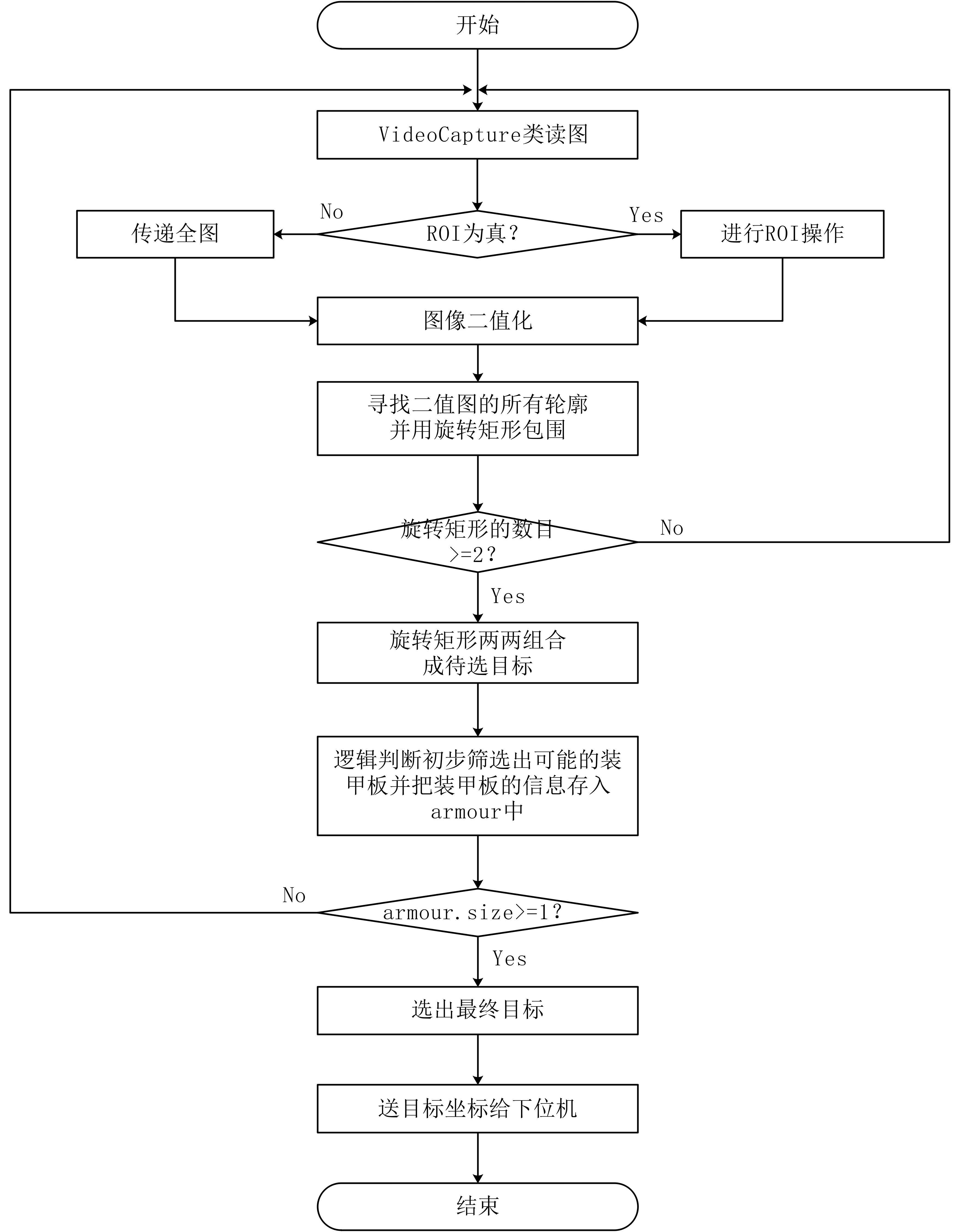
装甲板检测流程图
基本原理
- 如果上一帧的 ROI 标志位为 true 则当前帧的检测区域在上一帧目标的附近,也就是用到了 ROl 方法,如果为 false 则全图搜索,此时将与 ROI 有关的变量全部清零。
- 对检测区域内的图进行二值化,也就是预处理,思路就是先将图片用灰度阈值进行二值化,这样子可以将图片中发光的物体给提取出来(装甲板灯条以及日光灯等等),然后再用某种方法将图片中红色或蓝色的区域提取出来,之后再膨胀腐蚀用形态学的方法连通断开的区域,使灯条的形状更加清晰以便于之后的逻辑判断。 - 一种方法是用 RGB 的红蓝通道相减,根据设定的阈值得到一张二值图,这种方法虽好,但是在识别蓝色的时候,有时候无法排除掉日光灯干扰,该方法,操作简洁,耗时低。- 另一种是先将图片转化成 HSV 颜色空间再用通道范围将红色蓝色提取出来,这种方法可以排除掉很多干扰,但是近距离的时候装甲板灯条发白,如果膨胀不到位的话会出现灯条断裂的 情况,膨胀的卷积核过大又会造成预处理耗时过久,因此要权衡一下。- 还有一种是在 LAB 下利用 a 通道-b 通道来提取红色。这种方法对红色灯条提取的效果是最好的。但是却极容易把比较暗的,有一点带暗红色的物体都提取出来,容易形成过多的早点。
3.在当前二值图内找到所有的轮廓点,用最小旋转矩形将他们包围,此时得到一个个单独的旋转矩形,然后对旋转矩形的四个顶点重新排序,排除长大于宽的噪点,然后根据装甲板灯条的几何特征首先筛除掉一些旋转矩形。
if((width/height)>2&&abs(angle)>25&&abs(angle)<70&&){continue;}
4.将这些灯条两两再次组成一个大的旋转矩形(也就是候选装甲板),根据一些限制条件筛除掉不符合条件的装甲板,将剩下的待选装甲板放入一个向量中。
//两两灯条间的角度差不符合的情况
if((abs(angle_1)>5&&abs(angle_1)<20)&&(abs(angle_2)>65&&abs(angle_2)<85)&&((abs(angle_2)>5&&abs(angle_2)<20)&&(abs(angle_1)>65&&abs(angle_1)<85))){
continue;}
//中心距根据灯条的长短分开设置
if(height_1<20||height_2<20){
cha=10;}
else{
cha=20;}
//进一步根据两条灯条的中心距和灯条面积比例等条件进一步筛选
//一下条件参数是根据640,480分辨率下设定的,不同分辨率条件值可能不一样
if(lantern_cha<cha&&(area_rate>rate2&&area_rate<rate1))
{
double diameter=sqrt(pow(rectPoint[original_index_i].center.x- rectPoint[original_index_j].center.x,2)+pow(rectPoint[original_index_i].center.y-rectPoint[original_index_j].center.y,2));
if(diameter<35){continue;}
//cout<<"d: "<<diameter<<endl;
double average_height=(height_1+height_2)*0.5;
cout<<"h: "<<average_height<<endl;
double bili=average_height/diameter;
if(bili>0.8&&bili<1.8){continue;}
if((diameter/average_height>2.5&&diameter/average_height<6)||(diameter/average_height>0.3&&diameter/average_height<2.5)){
Point armour_center=(rectPoint[original_index_i].center+rectPoint[original_index_j].center)*0.5;
circle(imgOriginal,armour_center,diameter/2,Scalar(0,255,255),1);//紫色
Vec3f armour_message(armour_center.x,armour_center.y,diameter);
armour.push_back(armour_message);
}
}
- 经过上述操作后,我们最终把筛选出来的装甲板存入 amour 向量中。- 如果向量中没有元素,则说明没有找到目标,只有一个的话则这就是最终选择的装甲板。(只有一个装甲板的情况下不再进一步判断装甲板的真实性,及不再传入用装甲板训练的模型。这样做能保证目标的稳定性和代码的效率)- 两个以上装夹板的话就得进行接下去的比较,首先我们把距离图像下半部分及比较近的装甲板存为一组,然后从最近的开始用 caffe 模型进行验证。如果模型给出这个为真,则直接输出。
资源下载地址:https://download.csdn.net/download/sheziqiong/85773209
资源下载地址:https://download.csdn.net/download/sheziqiong/85773209
版权归原作者 biyezuopin 所有, 如有侵权,请联系我们删除。