
一、动态规划(DP)简介
动态规划(Dynamic Programming,简称DP)是运筹学的一个分支,它是一种通过将复杂问题分解成多个重叠的子问题,并通过子问题的解来构建整个问题的解的算法。在动态规划中,有几个核心概念需要理解:
- 状态:状态通常表示为形如dp[i][j] = val的取值,其中i和j是用于描述和确定状态所需的变量(下标),而val则是该状态对应的值。
- 状态转移:状态转移描述了不同状态之间如何相互转化。这通常可以表示为一个数学表达式,而转移的方向则决定了算法是迭代还是递归地进行。
- 最终状态:最终状态即题目所要求解的状态,也是我们通过动态规划算法最终要得到的答案。
动态规划的关键在于找到子问题之间的重叠关系,并存储这些子问题的解以避免重复计算。通过这种方式,动态规划能够在多项式时间内解决一些看似复杂的问题,如背包问题、最短路径问题等。在实际应用中,动态规划被广泛用于优化和控制问题,以及计算机视觉、生物信息学等领域。
二、动态规划的解题步骤
步骤一:确定状态
首先,需要明确问题的状态表示。在动态规划问题中,状态通常定义为“到第i个为止,xx为j(xx为k)的方案数/最小代价/最大价值”等。这里,“i”、“j”和可能的“k”是状态的参数,它们根据具体问题而定。状态的确切定义取决于问题的性质和所需优化的目标(如最小代价、最大价值或方案数)。
步骤二:确定状态转移方程
状态转移方程是动态规划的核心,确定状态转移方程,即从已知状态得到新状态的方法,并确保按照这个方向一定可以正确地得到最终状态。根据状态转移的方向来决定使用迭代法还是递归法(记忆化)。状态转移方程的确立通常基于问题的特定条件和约束。
步骤三:确定最终状态并输出
最终状态通常是问题的解所对应的状态。在确定了状态转移方程后,我们需要按照这个方程迭代或递归地计算出所有可能的状态,直到达到最终状态。最终状态可能是通过迭代法逐步累积得到,也可能是通过递归法(结合记忆化以避免重复计算)逐步回溯得到。一旦到达最终状态,我们就可以根据问题的要求输出相应的解,如最小代价、最大价值或特定条件下的方案数。
综上所述,这三个步骤——确定状态、确定状态转移方程和确定最终状态并输出——构成了动态规划求解问题的一般框架。在实际应用中,根据具体问题的不同,这些步骤的具体实现方式也会有所不同。
三、线性DP例题
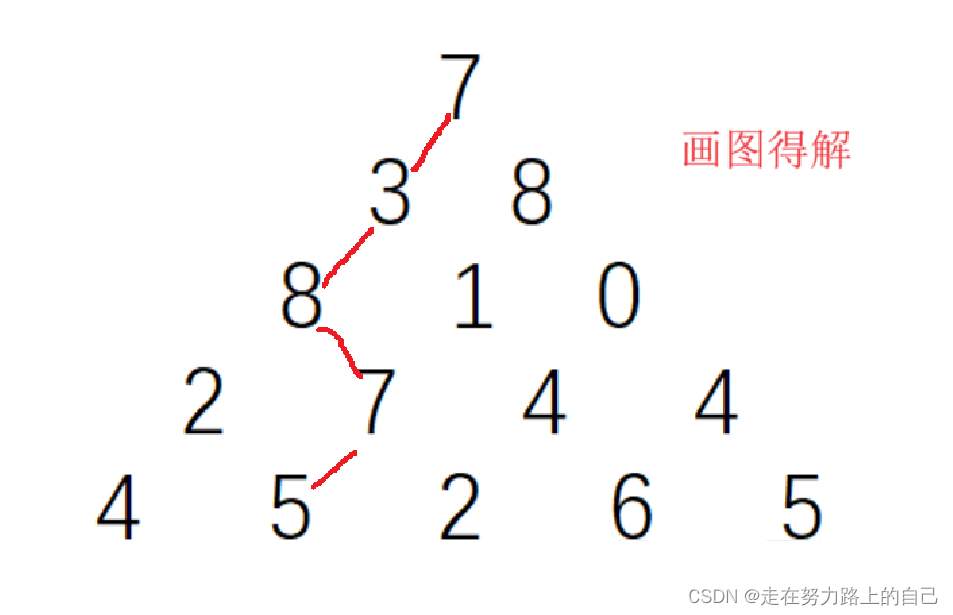
(一)数字三角形(最大路径)

上图给出了一个数字三角形。从三角形的顶部到底部有很多条不同的路径对于每条路径,把路径上面的数加起来可以得到一个和,你的任务就是找到最大的和(路径上的每一步只可沿左斜线向下或右斜线向下走)。
输入描述
输入的第一行包含一个整数 N(1 ≤ N < 100),表示三角形的行数。
下面的 N 行给出数字三角形。数字三角形上的数都是 0 至 99 之间的整数。
输出描述
输出一个整数,表示答案。
输入样例
5 7 3 8 8 1 0 2 7 4 4 4 5 2 6 5
输出样例
30
思路:
- 从最后一层向上,取最大值累加。
- 确定状态:设状态dp[ i ][ j ] = a[ i ][ j ] + max(dp[ i + 1 ][ j ], dp[ i + 1 ][ j + 1 ]);
- 状态转移方程为dp[i][j]=max(dp[i+1]lj],dp[i +1][j + 1]) ;
- 因为这里需要用下面的状态更新上面的,所以我们应该从下往上进行状态转移。最后输出dp[1][1]
#include<bits/stdc++.h>
using namespace std;
using ll = long long;
const int N = 105;
ll a[N][N], dp[N][N];
int main()
{
int n; cin >> n;
for (int i = 1; i <= n; ++i)
for (int j = 1; j <= i; j++)
cin >> a[i][j];
for (int i = n; i >= 1; i--)
for (int j = 1; j <= i; j++)
dp[i][j] = a[i][j] + max(dp[i + 1][j], dp[i + 1][j + 1]);
cout << dp[1][1] << '\n';
return 0;
}
(二)破损的楼梯(方案数)
问题描述:
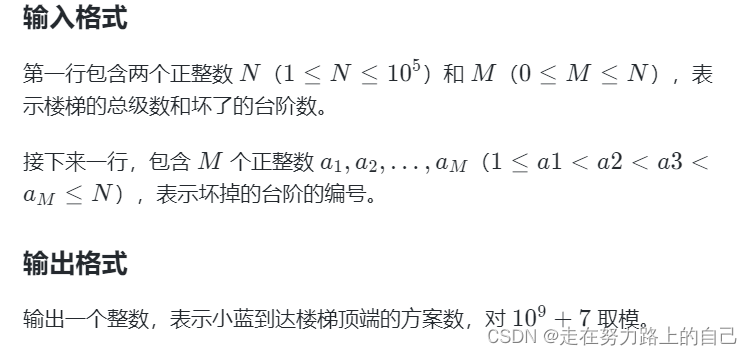
小蓝来到了一座楼梯前,楼梯共有N级台阶。从第0级台阶出发,小蓝每次可以迈上1级或2级台阶。但是,楼梯上的第a1级、第a2级、第a3级,以此类推,共M级台阶的台阶面已经坏了,不能踩。
小蓝想要到达楼梯的顶端,即第N级台阶,且不能踩到坏台阶。请问他有多少种到达顶端的方案数?由于方案数可能很大,请输出结果对取模的值。
样例输入
6 1 3
样例输出
4
思路:
- 确定状态:状态dp[ i ]表示走到第 i 级台阶的方案数。
- 确定状态转移方程:在正常的楼梯上,我们可以从第i - 1级台阶或第i - 2级台阶走到第 i 级台阶,因此状态转移方程为dp[ i ] = dp[ i-1 ]+dp[ i - 2 ]。
- 然而,如果第 i 级台阶是破损的,则不能走到该台阶,此时我们需要将dp[ i ]设为0。
- 最后我们输出dp[ n ],表示走到第 n 级台阶的方案数
#include<bits/stdc++.h>
using namespace std;
const int p = 1e9 + 7;
int n, m;
int main()
{
cin >> n >> m;
vector<int>dp(n + 1, 1);int temp = 0;
for (int i = 1; i <= m; i++)
{
cin >> temp;
dp[temp] = 0;
}
for (int i = 2; i <= n; i++)
{
if (!dp[i])continue;
dp[i] = (dp[i - 1] + dp[i - 2]) % p;
}
cout << dp[n] << '\n';
return 0;
}
(三)安全序列(方案数)
问题描述
小蓝是工厂里的安全工程师,他负责在工厂里安全地放置危险品油桶。工厂的空位排列成一条直线,共有n个空位。小蓝需要按照特定的规则在这些空位上放置油桶:每两个油桶之间至少需要k个空位隔开。现在,小蓝想知道有多少种不同的放置方案可以满足这些条件。由于可能的方案数非常大,输出结果需要对10^9 + 7取模。
输入格式
输入包含两个正整数n和k,分别表示空位的数量和每两个油桶之间至少需要的空位数。
输出格式
输出一个整数,表示满足条件的放置方案数对10^9 + 7取模的结果。
样例输入
4 1
样例输出
6
说明
在样例中,有4个空位,每两个油桶之间至少需要1个空位。可能的放置方案有6种,分别是:0000(不放任何油桶),1000,0100,0010,0001和1001(其中1表示放置油桶,0表示不放)。注意,这里的方案数已经对10^9 + 7取模。
评测数据规模
对于所有评测数据,1 ≤ n ≤ 10^9,1 ≤ k ≤ n-1。
思路:
首先,我们定义dp[i]为在前i个空位中放置油桶的方案数。然后,我们需要计算前缀和数组prefix。对于每个位置i,prefix[i]表示从位置0到位置i为止的所有放置方案数的总和。
ll dp[N], prefix[N];
循环遍历判断每个位置之前没有足够的空间放置另一个油桶 。
如果当前位置减去k再减1小于1,则dp[ i ]为1。
否则,dp[ i ]的值等于前缀和数组在( i - 1 - k )位置的值。
if (i - k - 1 < 1)dp[i] = 1;
else dp[i] = prefix[i - 1 - k];
设状态dp[ i ]表示以位置i结尾的方案总数,状态转移方程:
但是直接去求和肯定会超时,所以我们需要利用前缀和来优化时间复杂度(注意取模)。
prefix[i] = (prefix[i - 1] + dp[i]) % p;
计算到当前位置为止,包括所有符合条件的放置方案数的总和。
#include<bits/stdc++.h>
using namespace std;
using ll = long long;
const ll N = 1e6 + 9, p = 1e9 + 7;
ll dp[N], prefix[N];
int main()
{
int n, k; cin >> n >> k;
dp[0] = prefix[0] = 1;// 初始化dp和prefix数组的第0项为1,表示空序列的方案数为1
for (int i = 1; i <= n; ++i)// 遍历1到n,计算每个位置的dp值和前缀和
{
if (i - k - 1 < 1)dp[i] = 1;
// 如果当前位置减去k再减1小于1,则dp[i]为1
// 说明在当前位置之前没有足够的空间放置另一个油桶,
// 因此在这种情况下,只能选择不放置油桶,所以'dp[i]'被设为'1'。
else dp[i] = prefix[i - 1 - k];
// 否则,dp[i]的值等于前缀和数组在(i-1-k)位置的值
// 这表示从位置'0'到位置'i-k-1'的所有放置方案数。
// 这样做是因为每两个油桶之间需要至少'k'个空位,
// 因此'dp[i]'实际上继承了在'i-k-1'位置及之前能放置油桶的所有方案。
prefix[i] = (prefix[i - 1] + dp[i]) % p;
// 计算到当前位置为止,包括所有符合条件的放置方案数的总和,并将结果模上'p'以防溢出。
}
cout << prefix[n] << '\n';
return 0;
}
今天就先到这了!!!

看到这里了还不给博主扣个:
⛳️ 点赞☀️收藏 ⭐️ 关注!
你们的点赞就是博主更新最大的动力!
有问题可以评论或者私信呢秒回哦。
版权归原作者 走在努力路上的自己 所有, 如有侵权,请联系我们删除。