
文章目录
前言
为了学这个lab1也是踩了很多坑…记录下此篇是希望让我自己的学习不只是走马观花一遍而过,也是给对Lab1一点头绪都没的小白提供一个理解的方式。希望后来者还是要有自己的思考,去完成这个lab1会对自己收获帮助比较大。对于完整代码文末提供了代码gitee地址。
一、背景知识
- 首先是对go语言的学习这里提供几个学习方式:
go语言圣经(在线文档)
菜鸟教程go语言教程
b站韩顺平go语言教学视频
go语言精进之路
推荐先大概看一遍文档,然后韩顺平老师那部分主要看260多集管道并发那部分,讲的还是挺好的。
- 接着就是2004年那篇关于MapReduce第3节要看一遍,理解MapReduce的机制。这里对于读paper能力不好的提供一个中翻链接,以及b站学习视频。强推下方MapReduce的理解视频!!!简短且易懂
MapReduce中翻链接
MapReduce理解视频
以及我认为课程开篇Introduction也是很重要的,在我看来已经有点相当于课上写的笔记+框架介绍,以及能让你对分布式的理解再加深一些。
lab1 Introduction
二、搭建实验环境
因为go语言的插件编译需要,所以6.824的环境是需要在mac或者linux上完成。笔者是选择了ubuntu20.04在golang上进行。关于这个教程,可以看笔者写的另外一篇博客:2022-linux(ubuntu20.04)下go语言环境配置,以及goland安装。
最好使用sdk1.16,因为1.18差1.15是最多的,实验室用的是1.15,但是1.15不能进行调试,1.16才支持,选个相近的sdk以防导致插件导入等编译错误。
- 接着就是通过命令行终端,按照官方实验文档那样把实验拉下来:
git clone git://g.csail.mit.edu/6.824-golabs-2022 6.824
- 然后可以先通过命令行跑一遍一个提供的非并行版mrsequential.go:
cd6.824cd src/main
# 将wc.go编译成插件形式,生成wc.so
go build -race -buildmode=plugin ../mrapps/wc.go
rm mr-out*
# 进行并发检测,并将编译后生成的wc.so插件,以参数形式加入mrsequential.go,并运行
go run -race mrsequential.go wc.so pg*.txt
# 查看生成的文件more mr-out-0
- 如果跑通的话会在命令行输出文本单词的出现次数。
当然我们既然搭建了goland,那么就可以好好利用下集成环境。
- 先在src/main 底下创建脚本sh文件:wc-build.sh
# 进行并发检测,并将编译后生成的wc.so插件,以参数形式加入mrsequential.go,并运行
go build -race -buildmode=plugin ../mrapps/wc.go
# 删除生成的mr-out*以免每次第二次运行得先删除#rm mr-out*
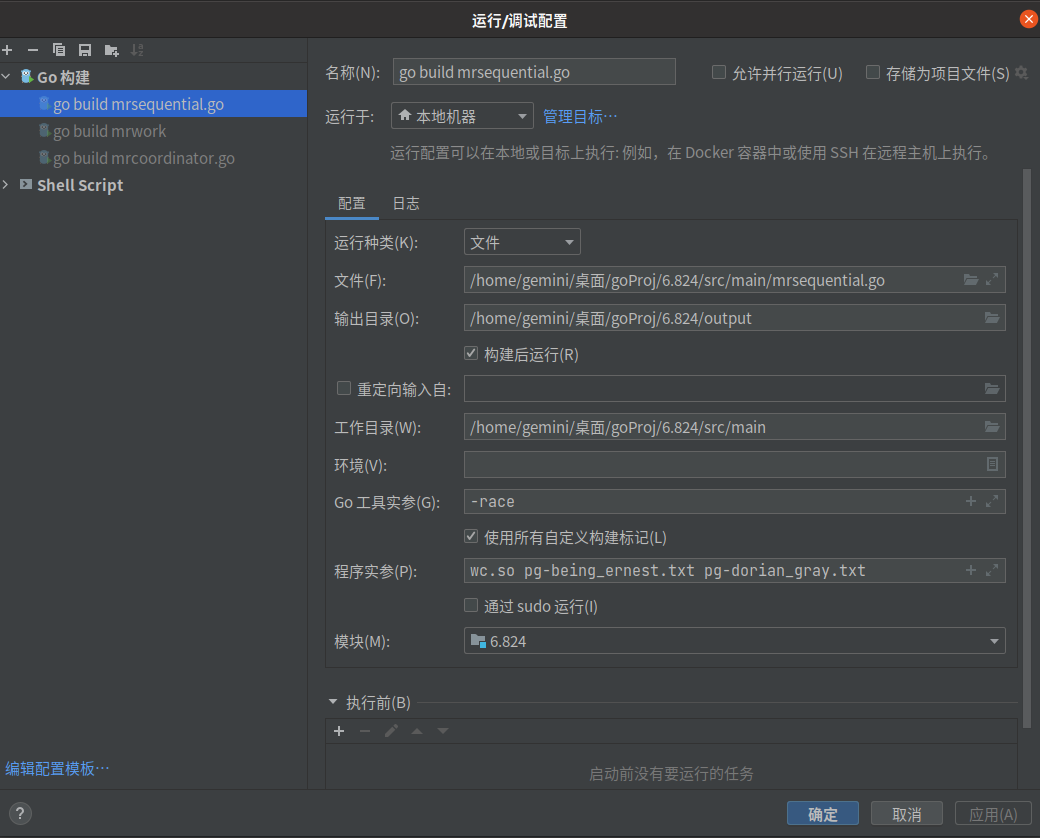
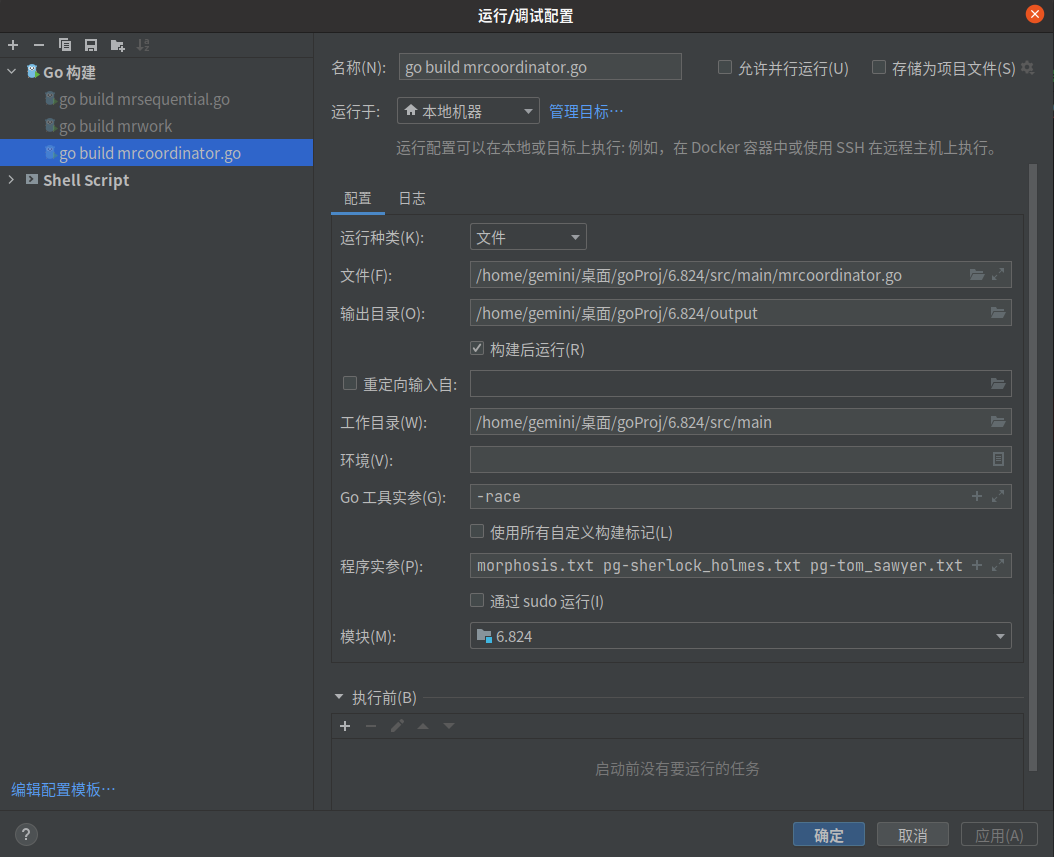
- 然后配置mrsequential.go:
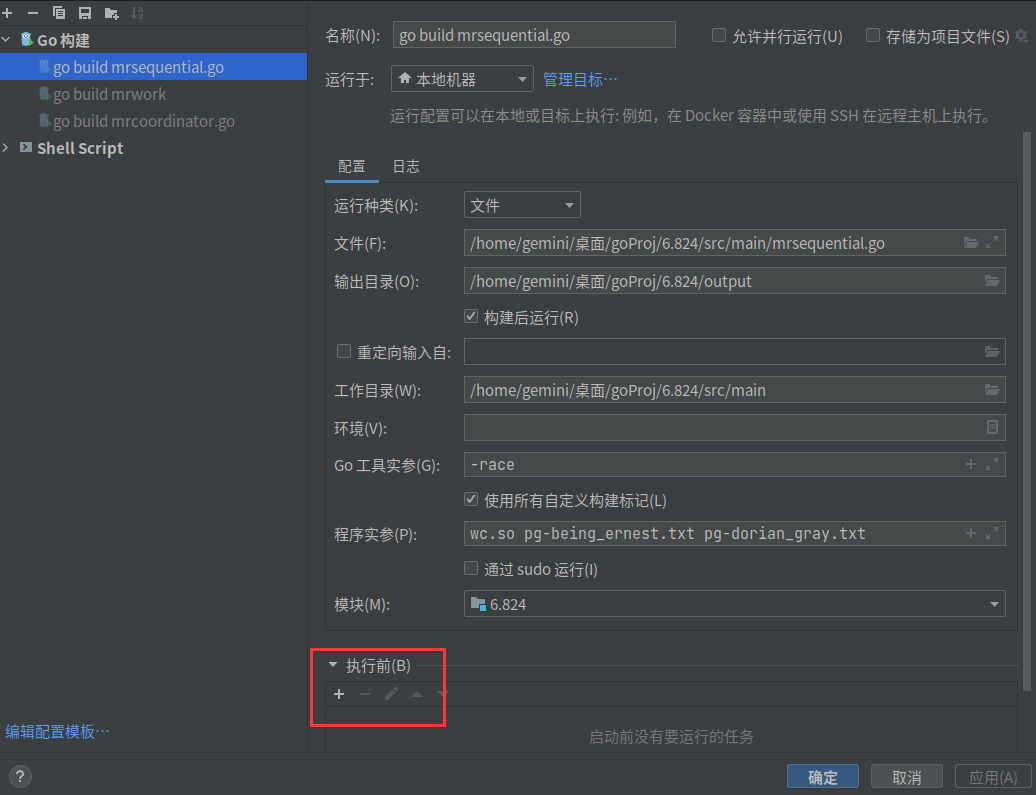
 以后启动就可以先启动wc-build.sh,然后再运行mrsequential.go。当然也可以直接在红框部分直接提添加运行shell脚本,但是会有报插件运行错误的风险。这种情况就把生成的wc.so 以及结果文本文件都删了,重新来过,最稳的就是命令行运行。
以后启动就可以先启动wc-build.sh,然后再运行mrsequential.go。当然也可以直接在红框部分直接提添加运行shell脚本,但是会有报插件运行错误的风险。这种情况就把生成的wc.so 以及结果文本文件都删了,重新来过,最稳的就是命令行运行。
要注意一点的是程序实参的传入的txt,不能是*这种的匹配符,以golang运行这种实参不会进行自动匹配。 所以参数mrcoordinator应该为以下文件名:
pg-being_ernest.txt pg-dorian_gray.txt pg-frankenstein.txt pg-grimm.txt pg-huckleberry_finn.txt pg-metamorphosis.txt pg-sherlock_holmes.txt pg-tom_sawyer.txt
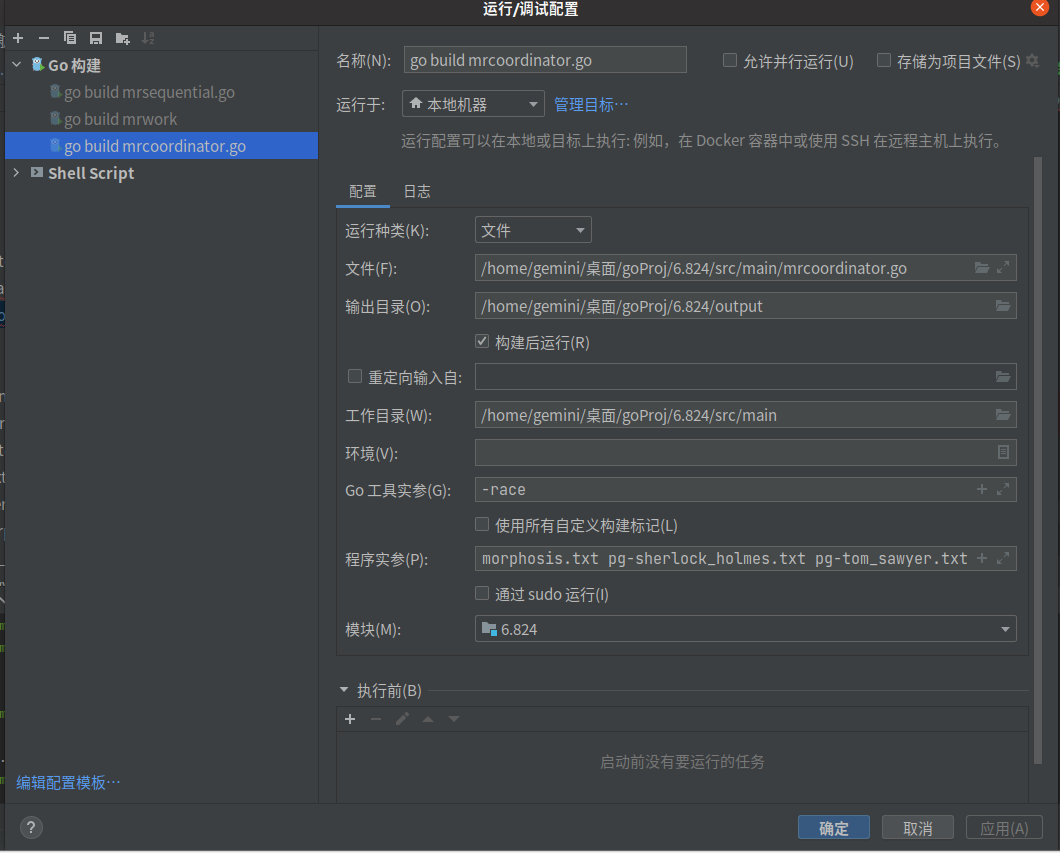
- mrcoordinator配置:
- mrwork配置:
- 对于笔者来说一般是mrcoordinator通过golang运行或者调试,mrworker每次在命令行重现编译插件后运行,利用fmt打印输出体验较佳!!!(因为因为wc.go编译在golang中运行实在是给跪了orz…)
三、lab正文
1.提示
前置工作差不多就这些,然后给出一些官方文档以及自己觉得重要的提示:
- 对于调试最重要的还是fmt打印输出!!!!比golang调试方便的多(很重要再提一遍!!!)
- 每次变更mr包下代码的时候最好重新编译wc.go,以防编译报找不到插件。
- 对于调试不方便的,可以使用fmt库打印结果作为调试。
- mrsequential.go 代码可以借鉴。
- main/mrcoordinator.go期望mr/coordinator.go实现一个 Done()方法,该方法在 MapReduce 作业完全完成时返回 true;此时,mrcoordinator.go将退出。
- worker的map方法用json存储中间kv对,reduce再读回来,因为真正分布式worker都不在一个机器上,涉及网络传输,所以用json编码解码走个过场。
- worker的map可以用 worker.go里面的ihash(key)得到特定key的reduce任务号。
- 对于任务的并发可以实现chan,是个天然的并发安全队列,对于函数内的安全可以使用sync.Mutex 进行加锁并用defer在函数执行完后进行解锁,实现 并发安全本文的思路也是基于这个。
2.思路
首先来看Lab提供的论文中的图: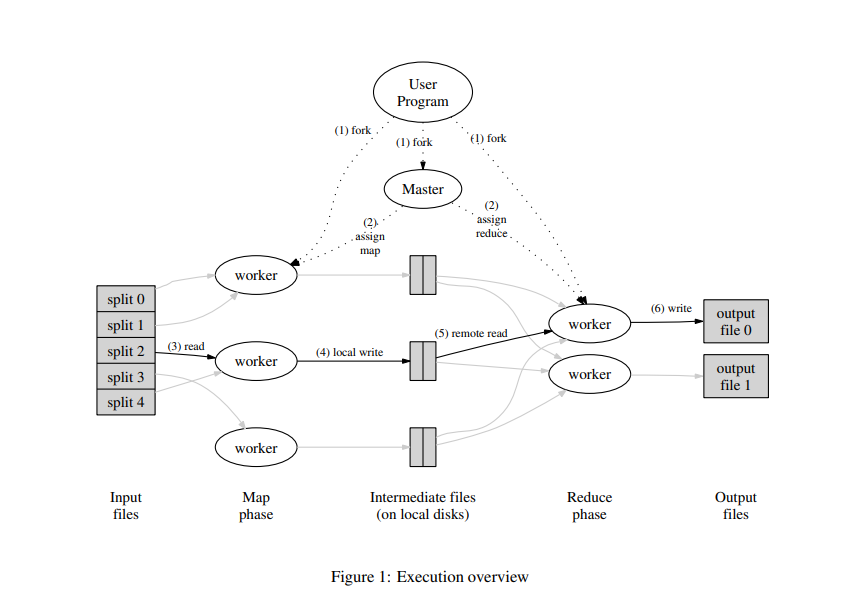
- 可以看出大致MapReduce的流程:启动一个Master(Coordinator协调者)分配多个任务给worker做Map任务。
- 然后Worker完成Map任务后返回中间值一组KV,接着协调者再将这些KV分发给后继的Worker根据KV进行Reduce任务,最后对Reduce进行一个总的处理进行返回。(如果还是不懂建议去看我上方所发的b站视频链接,讲的很透彻。)
3.实现
- 3.1 完成worker与Coordinator之间的交互,处理map任务
从实现来看我们可以先完成worker与Coordinator之间的交互,首先可以来看看给的Rpc例子:首先运行main/mrworker.go 会进入到 mr/Worker的这个方法中。可以在这个方法中调用RPC的例子方法:CallExample()。
然后CallExample()这个方法中会有一行:
ok :=call("Coordinator.Example",&args,&reply)
调用Coordinator包的Example方法。(这里有个刚学go语言的同学不会注意到的小细节。就是方法名开头为大写的代表可以为外包所调用。至于为什么传方法传的是指针可以看我另外一篇写的博客:Golang指针的应用场景理解。)
然后得到传修改后的reply,得到rpc返回值。至此coordinator与worker完成了简单的交互。
- 看懂了简单的Rpc交互,现在我们可以自己来实现一个Rpc做Map任务。 在rpc包下定义类似于ExampleArg,reply的传参,rpc的改变都是通过参数改变,因此都是用指针。
// Task worker向coordinator获取task的结构体type Task struct{
TaskType TaskType // 任务类型判断到底是map还是reduce
TaskId int// 任务的id
ReducerNum int// 传入的reducer的数量,用于hash
Filename string// 输入文件}// TaskArgs rpc应该传入的参数,可实际上应该什么都不用传,因为只是worker获取一个任务type TaskArgs struct{}// TaskType 对于下方枚举任务的父类型type TaskType int// Phase 对于分配任务阶段的父类型type Phase int// State 任务的状态的父类型type State int// 枚举任务的类型const(
MapTask TaskType =iota
ReduceTask
WaittingTask // Waittingen任务代表此时为任务都分发完了,但是任务还没完成,阶段未改变
ExitTask // exit)// 枚举阶段的类型const(
MapPhase Phase =iota// 此阶段在分发MapTask
ReducePhase // 此阶段在分发ReduceTask
AllDone // 此阶段已完成)// 任务状态类型const(
Working State =iota// 此阶段在工作
Waiting // 此阶段在等待执行
Done // 此阶段已经做完)
- 接着我们就来worker里面构造发送请求rpc的方法,获取Map任务:(此处的代码都为当时笔者所写,与最终代码实现会有出入,忘后来者能有自己的斟酌考虑):
- 总的判断,获取的任务类型,后面reduce任务也直接加这里,笔者这里采用假任务(ExitTask)的方法退出,当然也可以通过RPC没有获取到task后再退出的方式,可以自己去试试。
funcWorker(mapf func(string,string)[]KeyValue, reducef func(string,[]string)string){//CallExample()
keepFlag :=truefor keepFlag {
task :=GetTask()switch task.TaskType {case MapTask:{DoMapTask(mapf,&task)callDone()}case WaittingTask:{
fmt.Println("All tasks are in progress, please wait...")
time.Sleep(time.Second)}case ExitTask:{
fmt.Println("Task about :[", task.TaskId,"] is terminated...")
keepFlag =false}}}// uncomment to send the Example RPC to the coordinator.}
接下来实现上方中的方法:
- 调用RPC拉取协调者的任务:
// GetTask 获取任务(需要知道是Map任务,还是Reduce)funcGetTask() Task {
args := TaskArgs{}
reply := Task{}
ok :=call("Coordinator.PollTask",&args,&reply)if ok {
fmt.Println(reply)}else{
fmt.Printf("call failed!\n")}return reply
}
- 参考给定的wc.go、mrsequential.go的map方法,编写属于自己 的map方法,这里简述下流程:插件编辑进来的mapf方法处理Map生成一组kv,然后写到temp文件中,temp命名我采用mr-tmp-{taskId}-ihash(kv.Key),调用的库为文档推荐的json库。至于为什么采用中间文件,其实也是为了后面crash有关,这个在后面crash部分再提。
funcDoMapTask(mapf func(string,string)[]KeyValue, response *Task){var intermediate []KeyValue
filename := response.Filename
file, err := os.Open(filename)if err !=nil{
log.Fatalf("cannot open %v", filename)}// 通过io工具包获取conten,作为mapf的参数
content, err := ioutil.ReadAll(file)if err !=nil{
log.Fatalf("cannot read %v", filename)}
file.Close()// map返回一组KV结构体数组
intermediate =mapf(filename,string(content))//initialize and loop over []KeyValue
rn := response.ReducerNum
// 创建一个长度为nReduce的二维切片
HashedKV :=make([][]KeyValue, rn)for_, kv :=range intermediate {
HashedKV[ihash(kv.Key)%rn]=append(HashedKV[ihash(kv.Key)%rn], kv)}for i :=0; i < rn; i++{
oname :="mr-tmp-"+ strconv.Itoa(response.TaskId)+"-"+ strconv.Itoa(i)
ofile,_:= os.Create(oname)
enc := json.NewEncoder(ofile)for_, kv :=range HashedKV[i]{
enc.Encode(kv)}
ofile.Close()}}
- 做完任务也需要调用rpc在协调者中将任务状态为设为已完成,以方便协调者确认任务已完成,worker与协调者程序能正常退出。
// callDone Call RPC to mark the task as completedfunccallDone() Task {
args := Task{}
reply := Task{}
ok :=call("Coordinator.MarkFinished",&args,&reply)if ok {
fmt.Println(reply)}else{
fmt.Printf("call failed!\n")}return reply
}
接下来去协调者完善方法:
- 协调者结构体定义:
type Coordinator struct{// Your definitions here.
ReducerNum int// 传入的参数决定需要多少个reducer
TaskId int// 用于生成task的特殊id
DistPhase Phase // 目前整个框架应该处于什么任务阶段
TaskChannelReduce chan*Task // 使用chan保证并发安全
TaskChannelMap chan*Task // 使用chan保证并发安全
taskMetaHolder TaskMetaHolder // 存着task
files []string// 传入的文件数组}
其中taskMetaHolder为存放全部元信息(TaskMetaInfo)的map,当然用slice也行。
// TaskMetaHolder 保存全部任务的元数据type TaskMetaHolder struct{
MetaMap map[int]*TaskMetaInfo // 通过下标hash快速定位}
- TaskMetaInfo结构体的定义:
// TaskMetaInfo 保存任务的元数据type TaskMetaInfo struct{
state State // 任务的状态
TaskAdr *Task // 传入任务的指针,为的是这个任务从通道中取出来后,还能通过地址标记这个任务已经完成}
- mrcoordinator中初始协调者的方法(同worker)
// create a Coordinator.// main/mrcoordinator.go calls this function.// nReduce is the number of reduce tasks to use.//funcMakeCoordinator(files []string, nReduce int)*Coordinator {
c := Coordinator{
files: files,
ReducerNum: nReduce,
DistPhase: MapPhase,
TaskChannelMap:make(chan*Task,len(files)),
TaskChannelReduce:make(chan*Task, nReduce),
taskMetaHolder: TaskMetaHolder{
MetaMap:make(map[int]*TaskMetaInfo,len(files)+nReduce),// 任务的总数应该是files + Reducer的数量},}
c.makeMapTasks(files)
c.server()return&c
}
- 实现上方的makeMapTasks:将Map任务放到Map管道中,taskMetaInfo放到taskMetaHolder中。
// 对map任务进行处理,初始化map任务func(c *Coordinator)makeMapTasks(files []string){for_, v :=range files {
id := c.generateTaskId()
task := Task{
TaskType: MapTask,
TaskId: id,
ReducerNum: c.ReducerNum,
Filename: v,}// 保存任务的初始状态
taskMetaInfo := TaskMetaInfo{
state: Waiting,// 任务等待被执行
TaskAdr:&task,// 保存任务的地址}
c.taskMetaHolder.acceptMeta(&taskMetaInfo)
fmt.Println("make a map task :",&task)
c.TaskChannelMap <-&task
}}
- 上方生成id的方法(其实就是主键自增方式):
// 通过结构体的TaskId自增来获取唯一的任务idfunc(c *Coordinator)generateTaskId()int{
res := c.TaskId
c.TaskId++return res
}
- 将taskMetaInfo放到taskMetaHolder中的具体方法:
// 将接受taskMetaInfo储存进MetaHolder里func(t *TaskMetaHolder)acceptMeta(TaskInfo *TaskMetaInfo)bool{
taskId := TaskInfo.TaskAdr.TaskId
meta,_:= t.MetaMap[taskId]if meta !=nil{
fmt.Println("meta contains task which id = ", taskId)returnfalse}else{
t.MetaMap[taskId]= TaskInfo
}returntrue}
- 接下来实现worker中的一个调用协调者的一个rpc方法,也是我认为Coordinator比较核心的方法分配任务:将map任务管道中的任务取出,如果取不出来,说明任务已经取尽,那么此时任务要么就已经完成,要么就是正在进行。判断任务map任务是否先完成,如果完成那么应该进入下一个任务处理阶段(ReducePhase),因为此时我们先验证map则直接跳过reduce直接allDone全部完成。
// 分发任务func(c *Coordinator)PollTask(args *TaskArgs, reply *Task)error{// 分发任务应该上锁,防止多个worker竞争,并用defer回退解锁
mu.Lock()defer mu.Unlock()// 判断任务类型存任务switch c.DistPhase {case MapPhase:{iflen(c.TaskChannelMap)>0{*reply =*<-c.TaskChannelMap
if!c.taskMetaHolder.judgeState(reply.TaskId){
fmt.Printf("taskid[ %d ] is running\n", reply.TaskId)}}else{
reply.TaskType = WaittingTask // 如果map任务被分发完了但是又没完成,此时就将任务设为Waittingif c.taskMetaHolder.checkTaskDone(){
c.toNextPhase()}returnnil}}default:{
reply.TaskType = ExitTask
}}returnnil}
- 分配任务中转换阶段的实现:
func(c *Coordinator)toNextPhase(){if c.DistPhase == MapPhase {//c.makeReduceTasks()// todo
c.DistPhase = AllDone
}elseif c.DistPhase == ReducePhase {
c.DistPhase = AllDone
}}
- 分配任务中检查任务是否完成的实现:
// 检查多少个任务做了包括(map、reduce),func(t *TaskMetaHolder)checkTaskDone()bool{var(
mapDoneNum =0
mapUnDoneNum =0
reduceDoneNum =0
reduceUnDoneNum =0)// 遍历储存task信息的mapfor_, v :=range t.MetaMap {// 首先判断任务的类型if v.TaskAdr.TaskType == MapTask {// 判断任务是否完成,下同if v.state == Done {
mapDoneNum++}else{
mapUnDoneNum++}}elseif v.TaskAdr.TaskType == ReduceTask {if v.state == Done {
reduceDoneNum++}else{
reduceUnDoneNum++}}}//fmt.Printf("map tasks are finished %d/%d, reduce task are finished %d/%d \n",// mapDoneNum, mapDoneNum+mapUnDoneNum, reduceDoneNum, reduceDoneNum+reduceUnDoneNum)// 如果某一个map或者reduce全部做完了,代表需要切换下一阶段,返回true// Rif(mapDoneNum >0&& mapUnDoneNum ==0)&&(reduceDoneNum ==0&& reduceUnDoneNum ==0){returntrue}else{if reduceDoneNum >0&& reduceUnDoneNum ==0{returntrue}}returnfalse}
- 分配任务中修改任务的状态方法:
// 判断给定任务是否在工作,并修正其目前任务信息状态func(t *TaskMetaHolder)judgeState(taskId int)bool{
taskInfo, ok := t.MetaMap[taskId]if!ok || taskInfo.state != Waiting {returnfalse}
taskInfo.state = Working
returntrue}
- 接着再来实现一个调用的rpc方法,将任务标记为完成:
func(c *Coordinator)MarkFinished(args *Task, reply *Task)error{
mu.Lock()defer mu.Unlock()switch args.TaskType {case MapTask:
meta, ok := c.taskMetaHolder.MetaMap[args.TaskId]//prevent a duplicated work which returned from another workerif ok && meta.state == Working {
meta.state = Done
fmt.Printf("Map task Id[%d] is finished.\n", args.TaskId)}else{
fmt.Printf("Map task Id[%d] is finished,already ! ! !\n", args.TaskId)}breakdefault:panic("The task type undefined ! ! !")}returnnil}
- 最后来实现在map阶段中最后一个事情:如果map任务全部实现完(暂且略过reduce)阶段为AllDone那么Done方法应该返回true,使协调者能够exit程序。
//Done 主函数mr调用,如果所有task完成mr会通过此方法退出func(c *Coordinator)Done()bool{
mu.Lock()defer mu.Unlock()if c.DistPhase == AllDone {
fmt.Printf("All tasks are finished,the coordinator will be exit! !")returntrue}else{returnfalse}}
至此map阶段已经能暂且构成一个循环,先运行mrcoordinator.go、再运行mrworker查看效果。
mrcoordinator.go运行效果(笔者为了测试效果只传入了两个文件):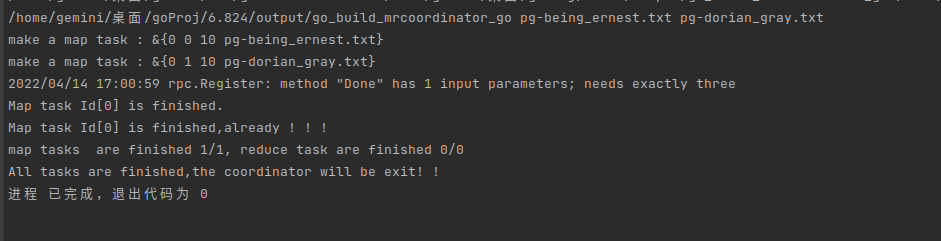
mrworker.go运行效果:
再去查看生成的文件: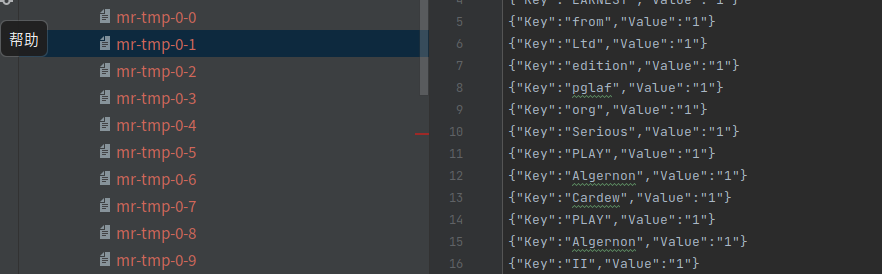
- 3.2 在map阶段上补充reduce阶段,并处理
- 有过大概一个流程写reduce阶段还是挺快,大部分逻辑其实和map阶段是相同的的,先继续初始写reduce方法:
func(c *Coordinator)makeReduceTasks(){for i :=0; i < c.ReducerNum; i++{
id := c.generateTaskId()
task := Task{
TaskId: id,
TaskType: ReduceTask,
FileSlice:selectReduceName(i),}// 保存任务的初始状态
taskMetaInfo := TaskMetaInfo{
state: Waiting,// 任务等待被执行
TaskAdr:&task,// 保存任务的地址}
c.taskMetaHolder.acceptMeta(&taskMetaInfo)//fmt.Println("make a reduce task :", &task)
c.ReduceTaskChannel <-&task
}}
这里要注意的是我把原来Task结构字段做出了一个改变,由Filename变为了一个文件切片数组。
// Task worker向coordinator获取task的结构体type Task struct{
TaskType TaskType // 任务类型判断到底是map还是reduce
TaskId int// 任务的id
ReducerNum int// 传入的reducer的数量,用于hash
FileSlice []string// 输入文件的切片,map一个文件对应一个文件,reduce是对应多个temp中间值文件}
因为对于重新理了以下MapReduce框架就可知,输入阶段时,初始化一个map任务其实是对应一个输入文件,但是经过map过程来看,我们其实一个任务切分成了很多tmp文件,那么reduce任务输入则应该是一组哈希相同的中间文件。
- 因此继续来补充上文的makeReduceTasks方法中挑选reduce的方法:
funcselectReduceName(reduceNum int)[]string{var s []string
path,_:= os.Getwd()
files,_:= ioutil.ReadDir(path)for_, fi :=range files {// 匹配对应的reduce文件if strings.HasPrefix(fi.Name(),"mr-tmp")&& strings.HasSuffix(fi.Name(), strconv.Itoa(reduceNum)){
s =append(s, fi.Name())}}return s
}
- 接着补充pollTask(分配任务)分发reduce任务:
func(c *Coordinator)PollTask(args *TaskArgs, reply *Task)error{// 分发任务应该上锁,防止多个worker竞争,并用defer回退解锁
mu.Lock()defer mu.Unlock()// 判断任务类型存任务switch c.DistPhase {case MapPhase:{iflen(c.MapTaskChannel)>0{*reply =*<-c.MapTaskChannel
if!c.taskMetaHolder.judgeState(reply.TaskId){
fmt.Printf("Map-taskid[ %d ] is running\n", reply.TaskId)}}else{
reply.TaskType = WaittingTask // 如果map任务被分发完了但是又没完成,此时就将任务设为Waittingif c.taskMetaHolder.checkTaskDone(){
c.toNextPhase()}returnnil}}case ReducePhase:{iflen(c.ReduceTaskChannel)>0{*reply =*<-c.ReduceTaskChannel
if!c.taskMetaHolder.judgeState(reply.TaskId){
fmt.Printf("Reduce-taskid[ %d ] is running\n", reply.TaskId)}}else{
reply.TaskType = WaittingTask // 如果map任务被分发完了但是又没完成,此时就将任务设为Waittingif c.taskMetaHolder.checkTaskDone(){
c.toNextPhase()}returnnil}}case AllDone:{
reply.TaskType = ExitTask
}default:panic("The phase undefined ! ! !")}returnnil}
- 补充之前切换状态的函数:
func (c *Coordinator)toNextPhase(){ifc.DistPhase==MapPhase{
c.makeReduceTasks()c.DistPhase=ReducePhase}elseifc.DistPhase==ReducePhase{c.DistPhase=AllDone}}
- 回头补充woker里的:
funcWorker(mapf func(string,string)[]KeyValue, reducef func(string,[]string)string){//CallExample()
keepFlag :=truefor keepFlag {
task :=GetTask()switch task.TaskType {case MapTask:{DoMapTask(mapf,&task)callDone()}case WaittingTask:{//fmt.Println("All tasks are in progress, please wait...")
time.Sleep(time.Second)}case ReduceTask:{DoReduceTask(reducef,&task)callDone()}case ExitTask:{//fmt.Println("Task about :[", task.TaskId, "] is terminated...")
keepFlag =false}}}// uncomment to send the Example RPC to the coordinator.}
- 分配reduce任务,跟map一样参考wc.go、mrsequential.go方法,有些代码可以直接拿来用,这里还是讲一下大概思路:对之前的tmp文件进行洗牌(shuffle),得到一组排序好的kv数组,并根据重排序好kv数组重定向输出文件。
funcDoReduceTask(reducef func(string,[]string)string, response *Task){
reduceFileNum := response.TaskId
intermediate :=shuffle(response.FileSlice)
dir,_:= os.Getwd()//tempFile, err := ioutil.TempFile(dir, "mr-tmp-*")
tempFile, err := ioutil.TempFile(dir,"mr-tmp-*")if err !=nil{
log.Fatal("Failed to create temp file", err)}
i :=0for i <len(intermediate){
j := i +1for j <len(intermediate)&& intermediate[j].Key == intermediate[i].Key {
j++}var values []stringfor k := i; k < j; k++{
values =append(values, intermediate[k].Value)}
output :=reducef(intermediate[i].Key, values)
fmt.Fprintf(tempFile,"%v %v\n", intermediate[i].Key, output)
i = j
}
tempFile.Close()
fn := fmt.Sprintf("mr-out-%d", reduceFileNum)
os.Rename(tempFile.Name(), fn)}
- 洗牌方法
// 洗牌方法,得到一组排序好的kv数组funcshuffle(files []string)[]KeyValue {var kva []KeyValue
for_, filepath :=range files {
file,_:= os.Open(filepath)
dec := json.NewDecoder(file)for{var kv KeyValue
if err := dec.Decode(&kv); err !=nil{break}
kva =append(kva, kv)}
file.Close()}
sort.Sort(SortedKey(kva))return kva
}
至此reduce阶段也基本完成,最后得到的结果应有:
3.3 从课程文档来看,测试阶段还有一个 crash测试
- 从文档上来看一下crash的定义:
If you choose to implement Backup Tasks (Section 3.6), note that we test that your code doesn’t schedule extraneous tasks when workers execute tasks without crashing. Backup tasks should only be scheduled after some relatively long period of time (e.g., 10s).
简单的翻译过来就是:如果你选择去实现一个备份任务来容错,请注意我们测试你的代码时候不会安排无关的任务(个人认为就是假死任务)让worker去执行,也因此不会崩溃。备份任务只有在一些任务很久没有得到响应后,才会被安排(例如10s)。
- 因此我们对crash的情况可以大概这样处理:先给在工作信息补充一个记录时间的开始状态,然后在初始化协调者的时候同步开启一个crash探测协程,将超过10s的任务都放回chan中,等待任务重新读取。
// TaskMetaInfo 保存任务的元数据type TaskMetaInfo struct{
state State // 任务的状态
StartTime time.Time // 任务的开始时间,为crash做准备
TaskAdr *Task // 传入任务的指针,为的是这个任务从通道中取出来后,还能通过地址标记这个任务已经完成}
- 初始化补充时间:
// 判断给定任务是否在工作,并修正其目前任务信息状态func(t *TaskMetaHolder)judgeState(taskId int)bool{
taskInfo, ok := t.MetaMap[taskId]if!ok || taskInfo.state != Waiting {returnfalse}
taskInfo.state = Working
taskInfo.StartTime = time.Now()returntrue}
在协调者中补充开启crash协程:
funcMakeCoordinator(files []string, nReduce int)*Coordinator {
c := Coordinator{
JobChannelMap:make(chan*Job,len(files)),
JobChannelReduce:make(chan*Job, nReduce),
jobMetaHolder: JobMetaHolder{
MetaMap:make(map[int]*JobMetaInfo,len(files)+nReduce),},
CoordinatorCondition: MapPhase,
ReducerNum: nReduce,
MapNum:len(files),
uniqueJobId:0,}
c.makeMapJobs(files)
c.server()go c.CrashHandler()return&c
}
crash探测协程的实现:
func(c *Coordinator)CrashDetector(){for{
time.Sleep(time.Second *2)
mu.Lock()if c.DistPhase == AllDone {
mu.Unlock()break}for_, v :=range c.taskMetaHolder.MetaMap {if v.state == Working {//fmt.Println("task[", v.TaskAdr.TaskId, "] is working: ", time.Since(v.StartTime), "s")}if v.state == Working && time.Since(v.StartTime)>9*time.Second {
fmt.Printf("the task[ %d ] is crash,take [%d] s\n", v.TaskAdr.TaskId, time.Since(v.StartTime))switch v.TaskAdr.TaskType {case MapTask:
c.MapTaskChannel <- v.TaskAdr
v.state = Waiting
case ReduceTask:
c.ReduceTaskChannel <- v.TaskAdr
v.state = Waiting
}}}
mu.Unlock()}}
四、lab测试过程
在整个lab测试过程我也是不出意外的出了两个test-fail,分别是early_exit,和carsh测试,在这就简单的分享一下心路历程。
首先那个总体的test其实内容还是挺多,我建议先总体的跑一次,然后将没过的test单独,设为一个sh脚本,进行单独测试,例如early_exit一样:
#!/usr/bin/env bash## map-reduce tests## comment this out to run the tests without the Go race detector.RACE=-race
if[["$OSTYPE"="darwin"* ]]thenif go version |grep'go1.17.[012345]'then# -race with plug-ins on x86 MacOS 12 with# go1.17 before 1.17.6 sometimes crash.RACE=echo'*** Turning off -race since it may not work on a Mac'echo' with '`go version`fifiTIMEOUT=timeout
iftimeout 2s sleep1> /dev/null 2>&1then:elseif gtimeout 2s sleep1> /dev/null 2>&1thenTIMEOUT=gtimeout
else# no timeout commandTIMEOUT=echo'*** Cannot find timeout command; proceeding without timeouts.'fifiif["$TIMEOUT"!=""]thenTIMEOUT+=" -k 2s 180s "fi# run the test in a fresh sub-directory.rm -rf mr-tmp
mkdir mr-tmp ||exit1cd mr-tmp ||exit1rm -f mr-*
# make sure software is freshly built.(cd ../../mrapps && go clean)(cd ..&& go clean)(cd ../../mrapps && go build $RACE -buildmode=plugin wc.go)||exit1(cd ../../mrapps && go build $RACE -buildmode=plugin indexer.go)||exit1(cd ../../mrapps && go build $RACE -buildmode=plugin mtiming.go)||exit1(cd ../../mrapps && go build $RACE -buildmode=plugin rtiming.go)||exit1(cd ../../mrapps && go build $RACE -buildmode=plugin jobcount.go)||exit1(cd ../../mrapps && go build $RACE -buildmode=plugin early_exit.go)||exit1(cd ../../mrapps && go build $RACE -buildmode=plugin crash.go)||exit1(cd ../../mrapps && go build $RACE -buildmode=plugin nocrash.go)||exit1(cd ..&& go build $RACE mrcoordinator.go)||exit1(cd ..&& go build $RACE mrworker.go)||exit1(cd ..&& go build $RACE mrsequential.go)||exit1failed_any=0echo'***' Starting crash test.
# generate the correct output../mrsequential ../../mrapps/nocrash.so ../pg*txt ||exit1sort mr-out-0 > mr-correct-crash.txt
rm -f mr-out*
rm -f mr-done
($TIMEOUT../mrcoordinator ../pg*txt ;touch mr-done )&sleep1# start multiple workers$TIMEOUT../mrworker ../../mrapps/crash.so &# mimic rpc.go's coordinatorSock()SOCKNAME=/var/tmp/824-mr-`id -u`(while[ -e $SOCKNAME -a ! -f mr-done ]do$TIMEOUT../mrworker ../../mrapps/crash.so
sleep1done)&(while[ -e $SOCKNAME -a ! -f mr-done ]do$TIMEOUT../mrworker ../../mrapps/crash.so
sleep1done)&while[ -e $SOCKNAME -a ! -f mr-done ]do$TIMEOUT../mrworker ../../mrapps/crash.so
sleep1donewaitrm$SOCKNAMEsort mr-out* |grep.> mr-crash-all
ifcmp mr-crash-all mr-correct-crash.txt
thenecho'---' crash test: PASS
elseecho'---' crash output is not the same as mr-correct-crash.txt
echo'---' crash test: FAIL
failed_any=1fi
- 然后对early_exit的测试,我其实是翻sh脚本命令,得到其实是调用early_exit.so的插件中。于是我又翻到了early_exit.go的文件中。加入了fmt打印,目前已经删了:
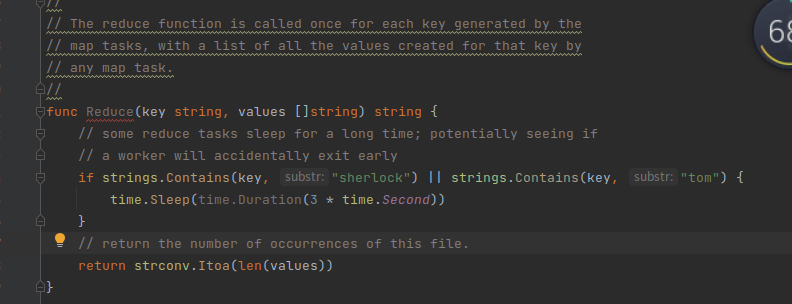 发现他这个其实只是给reduce任务sleep了3s。返回测试的输出,发现关于检查reduce的人其实没有完成就返回了,导致协调者早退,当worker睡了3s后已经连不上Unix连接导致失败了。
发现他这个其实只是给reduce任务sleep了3s。返回测试的输出,发现关于检查reduce的人其实没有完成就返回了,导致协调者早退,当worker睡了3s后已经连不上Unix连接导致失败了。 - 对于crash测试我其实那个协程一开始,死活测试不起,并且只卡到第一行第一个字节,我就想到是不是哪里阻塞住了,遂直接加入crash协程后直接对协调者进行golang的调试运行,发现rpc调用到polltask直接卡住了,后面觉得是crash协程疯狂获取锁,倒是PollTask的全局锁获取不到。于是在crash探测的协程里放松的对锁的获取(sleep 2s)有点像时间片轮转,遂成功了。
- 因为写这篇博客的时候其实是边敲边写的,所以最后的bug我想起来的其实都在上面改了的,如果有少量问题可以私信我更正。
五、lab1收获
这次lab1其实是春招实习上岸过后开始肝的,加上go的学习、读paper、和看课程视频,写完这篇博客,总的还是花了10天和课程要求的一周还是有出入(实在是废物了orz…),但是扎扎实实自己写下来我觉得还是真的有非常大的收获了,后面有时间也想继续冲接下来的lab。回到这篇的初衷,希望的是当初学lab1不是走马观花,这篇虽然我尽可能的详细的介绍了我的思路,但是还是希望后来者能有自己的思考和实现。这篇也是纯手码的,希望有错误的地方欢迎指正。最后附上自己7/7的allpast截图和完整代码gitee地址~






- git仓库地址:6.824 lab地址
- 觉得有收获的可以帮忙点个star~
版权归原作者 幸平xp 所有, 如有侵权,请联系我们删除。